Изобретение относится к радиолокационным устройствам (системам) и предназначено для автоматизированной классификации воздушных объектов (ВО), совершающих полет с траекторными нестабильностями (ТН) в турбулентной атмосфере.
Известно устройство классификации ВО [1] для радиолокационной станции с многочастотным зондирующим сигналом, содержащее генератор гармонического сигнала частоты f, M умножителей частоты, М стробируемых усилителей мощности, модулятор, антенный переключатель, антенну, М приемников, М фазовых детекторов, М пересчетных устройств, (М-1) усилителей разностных сигналов, электронно-вычислительную машину (ЭВМ) и устройство отображения (УО). При этом генератор гармонического сигнала соединен своим выходом с входами М умножителей частоты, выходы которых связаны с первыми входами М соответствующих стробируемых усилителей мощности, а также с входами М соответствующих фазовых детекторов. Вторые входы стробируемых усилителей мощности подключены к выходу модулятора, а их выходы через соответствующие входы антенного переключателя - к антенне. Выходы антенного переключателя соединены с входами соответствующих М приемников, выходы которых соединены с входами соответствующих М фазовых детекторов, выходы которых подключены к входам соответствующих М пересчетных устройств. Выход каждого m-го пересчетного устройства, начиная со второго и заканчивая (М-1)-м пересчетным устройством, соединен с первым входом m-го и вторым входом (m-1)-го усилителя разностного сигнала. Выход первого пересчетного устройства соединен с первым входом первого усилителя разностного сигнала, а выход М-го пересчетного устройства - с вторым входом (M-1)-го усилителя разностного сигнала. Выходы (М-1)-x усилителей разностных сигналов соединены с соответствующими входами ЭВМ, выход которой подключен к входу устройства отображения.
Данное устройство позволяет определять размеры ВО. Кроме того, при совпадении информации с выходов усилителей разностных сигналов с эталонной, хранящейся в памяти ЭВМ, устройство способно классифицировать ВО по геометрическим размерам. Однако классификация возможна только в том случае, если размеры ВО близки к половине длины волны одного из М сигналов разных частот. Причем вероятность классификации будет низкой, так как размеры ВО зависят от ракурса локации, что не учитывается при классификации.
Известно также устройство классификации ВО с траекторными нестабильностями движения [2], которое содержит задающий генератор (ЗГ), 1-й и 2-й смесители, блок гетеродинов (БГ), импульсный модулятор (ИМ), антенну, 1-й и 2-й аналого-цифровые преобразователи (АЦП), усилитель мощности (УМ), антенный переключатель (АП), вычислительное устройство (ВУ), фазовращатель (ФВ), усилитель промежуточной частоты (УПЧ), усилитель высокой частоты (УВЧ), 1-й и 2-й фазовые детекторы (ФД) и УО. При этом выход ЗГ соединен со 2-м входом 1-го смесителя, с 2-м входом 2-го ФД, а также с входом ФВ, выход которого соединен с 2-м входом 1-го ФД. Первый вход 1-го смесителя соединен с выходом БГ, выход которого также соединен с 2-м входом 2-го смесителя. Выход 1-го смесителя соединен с 1-м входом УМ, 2-й вход которого связан с выходом ИМ. Выход УМ связан с входом АП, вход-выход которого соединен с вход-выходом антенны, а выход - с входом УВЧ, выход которого соединен с 1-м входом 2-го смесителя. Выход 2-го смесителя соединен с входом УПЧ, выход которого соединен с 1-м входом 1-го ФД и с 1-м входом 2-го ФД. Выход 1-го ФД соединен с входом 1-го АЦП, а выход 2-го ФД соединен с входом 2-го АЦП. Выход 1-го АЦП и выход 2-го АЦП соединены соответственно с 1-м и 2-м входами ВУ, а выход ВУ подключен ко входу УО.
Недостатком устройства [2] является то, что логика его работы предполагает неизменность числа рассеивающих центров (РЦ) на поверхности объекта, неизменность эффективной площади рассеяния РЦ, их взаимного удаления от первого по дальности РЦ, постоянство радиального размера ВО в процессе его длительного зондирования и неизменность относительного положения кажущегося центра объекта [3]. Однако на самом деле вследствие наличия ТН полета ВО в виде рысканий, тангажей и кренов [4] указанные физические величины с течением времени претерпевают изменения. Это отрицательно сказывается на качестве работы устройства классификации, причем вероятность классификации становится тем меньше, чем больше времени отводится на излучение, прием и обработку необходимого числа радиоимпульсов. Другим недостатком является отсутствие в составе устройства [2] генератора несущей частоты, определяющего сантиметровый диапазон длин волн при излучении сигналов. Генерируемая им частота должна составлять десятки гигагерц. Используемый блок гетеродинов, согласно описанию [2], состоит из набора кварцевых гетеродинов и коммутатора, предназначенного для подключения определенного когерентного гетеродина, формирующего сигнал n-й гетеродинной частоты. Современные кварцевые генераторы могут вырабатывать сигналы с частотами не выше сотен мегагерц.
Задачей изобретения является повышение вероятности правильной классификации воздушных объектов, испытывающих случайные колебания по углам рыскания, тангажа и крена в процессе облучения последовательностью зондирующих радиоимпульсов на разных частотах.
Решение поставленной задачи достигается тем, что в состав известного устройства классификации ВО [2] дополнительно вводят импульсный генератор, блок линий задержки, содержащий (М-1) линий задержки, где М - число используемых импульсных последовательностей, отличающихся шагом перестройки частоты от импульса к импульсу, блок умножителей частоты, содержащий (М-1) умножителей частоты, третий смеситель, генератор несущей частоты (ГНЧ), когерентный гетеродин.
При этом выход импульсного генератора соединяют со входом блока гетеродинов, выход которого соединяют с 1-м из М первых входов 1-го смесителя и со входом первой линии задержки (ЛЗ), являющимся также входом блока линий задержки, выход каждой m-й, с первой по (М-2)-ю, линии задержки подключают ко входу соответствующей (m+1)-й ЛЗ, а также ко входу соответствующего m-го умножителя частоты из состава блока умножения частоты, выход (М-1)-й ЛЗ подключают только ко входу (M-1)-го умножителя частоты. Выход каждого m-го, с 1-го по (М-1)-й, умножителя частоты связывают с соответствующим (m+1)-м из М первых входов первого смесителя, так что выход последнего (M-1)-го умножителя частоты становится соединенным с М-м из первых входов 1-го смесителя. Выход первого смесителя подключают одновременно к первому входу 3-го смесителя и входу когерентного гетеродина, выход которого соединяют одновременно со входом фазовращателя и вторым входом 2-го ФД. Выход генератора несущей частоты подключают одновременно к второму входу 2-го смесителя и 2-му входу 3-го смесителя, выход которого связывают со входом усилителя мощности.
Предложенное построение схемы устройства классификации позволяет повысить вероятность принятия правильного решения при классификации ВО за счет использования более информативного признака отождествления, основанного на усреднении амплитудных флюктуаций отраженных сигналов, вызванных изменением ракурса локации объекта, изменением частоты зондирования объекта и изменением шага перестройки частоты от импульса к импульсу.
На фиг.1 представлена структурная схема устройства классификации ВО с траекторными нестабильностями движения. Устройство включает импульсный генератор 1, БГ 2, блок линий задержки 8, блок умножителей частоты 9, 1-й смеситель 3, третий смеситель 5, ГНЧ 6, ЗГ 7, когерентный гетеродин 12, УМ 17, УВЧ 15, АП 16, 2-й смеситель 14, антенну 13, УПЧ 18, 1-й ФД 19, 2-й ФД 23, ФВ 21, 1-й АЦП 20, 2-й АЦП 24, ВУ 22 и УО 4.
Импульсный генератор 1 подключен своим выходом ко входу БГ 2, который соединен своим выходом со входом первой ЛЗ 10 и первым из М первых входов 1-го смесителя 3. Выход каждой m-й, с первой по (М-2)-ю, ЛЗ 10, входящих в состав блока линий задержки 8, подключен ко входу соответствующей (m+1)-й ЛЗ 10 и ко входу соответствующего m-го умножителя частоты 11 из состава блока умножителей частоты 9. Это означает, что выход 1-й ЛЗ 10 подключен ко входу 2-й ЛЗ 10 и входу первого умножителя частоты 11, выход 2-й ЛЗ 10 связан со входом 3-й ЛЗ 10 и входом 2-го умножителя частоты 11 и так далее до (М-2)-й ЛЗ 10, которая соединена выходом со входом (М-1)-й ЛЗ 10 и входом (М-2)-го умножителя частоты 11. Выход (М-1)-й ЛЗ 10 подключен только ко входу (M-1)-го умножителя частоты 11. Выход каждого m-го из (М-1) умножителей частоты 11 (все они входят в состав блока умножителей частоты 9) соединен с соответствующим (m+1)-м из М первых входов 1-го смесителя 3, второй вход которого связан с выходом ЗГ 7. Первый смеситель 3, третий смеситель 5, УМ 17, АП 16, УВЧ 15, 2-й смеситель 14 и УПЧ 18 соединены последовательно. Выход первого смесителя 3 связан также с входом когерентного гетеродина 12, выход которого подключен одновременно к входу ФВ 21 и второму входу 2-го ФД 23. Вход-выход антенны 13 соединен с вход-выходом АП 16, а выход ГНЧ 6 связан одновременно с вторым входом 3-го смесителя 5 и вторым входом 2-го смесителя 14. Выход УПЧ 18 подключен к первому входу 1-го ФД 19 и первому входу 2-го ФД 23. Выход ФВ 21 связан с вторым входом 1-го ФД 19. Выход 2-го ФД 23 соединен со входом 2-го АЦП 24, выход которого подключен к 2-му входу ВУ 22, которое своим выходом связано со входом УО 4, а первым входом - с выходом 1-го АЦП 20, вход которого подключен к выходу 1-го ФД 19.
Устройство работает следующим образом. Блок гетеродинов 2 запускается импульсом, сформированным импульсным генератором 1. Блок 2 состоит из набора кварцевых гетеродинов и коммутатора, переключающего последовательно выход очередного кварцевого гетеродина к выходу БГ 2. Длительность формируемого БГ 2 импульса определяется длительностью запускающего импульса из блока 1. Установленная импульсным генератором 1 длительность импульса τи, составляющая единицы мкс, определяет аналогичную длительность зондирующего сигнала предлагаемого устройства классификации. Период повторения Ти импульсов с выхода блока 1 и соответственно с выхода блока 2 определяется однозначно измеряемой дальностью до ВО и составляет сотни мкс. Блок гетеродинов 2 имеет в своем составе N гетеродинов по числу необходимых частот зондирования N, причем число N невелико и составляет, к примеру, N=15. Формируемые БГ 2 радиоимпульсы имеют частоты от десятых долей до единиц МГц. Разность частот Δf двух смежных импульсов (двух смежных гетеродинов блока 2) составляет величину порядка 0,1 МГц. Величина Δf представляет собой минимальный базовый разнос частот (шаг перестройки частоты от импульса к импульсу), который будет в дальнейшем кратно увеличиваться. Наиболее простым вариантом является тот, согласно которому на выходе БГ 2 формируется последовательность из N радиоимпульсов, частота каждого n-го из которых определяется выражением fn=nΔf. Таким образом, частота первого импульса равна Δf, а частота N-го - соответственно fN=NΔf. Длительность первой пачки импульсов на N разных частотах равна (NTи+τи).
После формирования импульсным генератором N прямоугольных импульсов (что приводит к формированию на выходе БГ 2 N импульсов на частотах fn=nΔf, где n - номер импульса) блок 1 временно прекращает формировать импульсы или может повторно начать выработку N импульсов через интервал времени tMN, зависящий от числа частот N и числа М используемых пачек радиосигналов, имеющих в пределах каждой пачки неизменный и отличающийся от других пачек шаг перестройки частоты от импульса к импульсу. Интервал tMN может быть рассчитан по формуле tMN=(MN+1)Ти.
Линии задержки 10 из состава блока 8 имеют одинаковые времена задержки tз. Время задержки tз определяется выражением tз=Tи(N+1).
Первая пачка импульсов на N частотах с выхода БГ 2 поступает на 1-й из М первых входов 1-го смесителя 3. На выходе 1-го смесителя 3 формируется последовательность импульсов с частотами fпр+Δf, fпр+2Δf, …, fпр+NΔf. Для этого на 2-й вход блока 3 поступает сигнал на промежуточной частоте fпр порядка 50 МГц с выхода ЗГ 7. После задержки в ЛЗ 10 и после увеличения частоты в умножителях частоты на соответствующие входы 1-го смесителя 3 будут поступать очередные пачки из N импульсов. Будем считать пачку из N импульсов, не проходящую ЛЗ 10 и поступившую на 1-й вход 1-го смесителя 3, первой (m=1). Вторая пачка из N импульсов поступит на 2-й из М первых входов 1-го смесителя 3 через интервал времени tз. Кроме того, частота всех импульсов второй пачки будет увеличена вдвое в 1-м умножителе частоты 11. В блок умножителей частоты 9 включены (М-1) умножителей частоты. Каждый m-й умножитель частоты 11, где  , имеет коэффициент умножения частоты, соответственно равный (m+1). То есть первый умножитель частоты 11 увеличивает частоту поступающего сигнала вдвое, второй умножитель - втрое, и так далее, а (М-1)-й умножитель частоты 11 увеличивает частоту поступающего на него сигнала в М раз.
, имеет коэффициент умножения частоты, соответственно равный (m+1). То есть первый умножитель частоты 11 увеличивает частоту поступающего сигнала вдвое, второй умножитель - втрое, и так далее, а (М-1)-й умножитель частоты 11 увеличивает частоту поступающего на него сигнала в М раз.
Таким образом, на выходе 1-го умножителя частоты 11 через интервал tз сформируется пачка из N импульсов с частотами 2Δf, 4Δf, 6Δf, …, 2NΔf. Она поступит на 2-й из М первых входов 1-го смесителя 3, в результате чего на выходе блока 3 будет сформирована вторая пачка импульсных сигналов с частотами fпр+2Δf, fпр+4Δf, …, fпр+2NΔf.
На выходе 2-й ЛЗ 10 сигналы появятся через интервал 2tз. Пройдя троекратное умножение по частоте, поступив на 3-й из М первых входов 1-го смесителя 3, эти сигналы на выходе 1-го смесителя 3 будут иметь частоты fпр+3Δf, fпр+6Δf, …, fпр+3NΔf. Продолжая рассуждения в соответствии с логикой работы предлагаемого устройства классификации, можно утверждать, что сигналы М-й пачки из N импульсов, пройдя (М-1)-ю ЛЗ 10 и (М-1)-й умножитель частоты появятся на выходе блока 3 через интервал (М-1)tз и будут иметь частоты fпр+МΔf, fпр+2МΔf, …, fпр+MNΔf.
Огибающие сформированной последовательности импульсных сигналов на входе 1-го смесителя 3 (до перехода на промежуточную частоту) показаны на фиг.2. Затемняющий фон показывает, что импульсы имеют частотное заполнение. Возле каждого импульса сверху или снизу представлено значение его частоты заполнения на входе 1-го смесителя 3.
Очевидно, что на выходе 1-го смесителя 3 формируется аналогичная последовательность из М пачек радиоимпульсов, каждая из которых включает по N радиоимпульсов. Из проведенных разъяснений понятно, что радиоимпульс m-й пачки с n-м номером в пределах пачки будет иметь на выходе блока 3 частоту fmn=fпр+mnΔf, а его задержка относительно начала первого импульса всей последовательности будет равна [(m-1)NTи+nТи].
Вся сформированная последовательность из М пачек радиоимпульсов поступает с выхода 1-го смесителя 3 на 1-й вход 3-го смесителя 5, на второй вход которого с выхода ГНЧ 6 поступает высокочастотный сигнал на несущей частоте f0, составляющей порядка 10 ГГц. В результате на вход УМ 17 с выхода блока 5 поступают радиоимпульсы, частота n-го из которых в пределах m-й пачки равна f0+fпр+mnΔf. Усилитель мощности 17 увеличивает мощность (амплитуду) входных радиоимпульсов до величины, обеспечивающей качественный прием сигналов после их отражения от ВО в пределах требуемой дальности [5, 6, 7]. С выхода УМ 17 радиоимпульсы проходят АП 16 и поступают в антенну 13, которая излучает их в направлении ВО, подлежащего классификации. Отразившись от ВО, радиоимпульсы улавливаются антенной 13 и через АП 16 поступают на вход УВЧ 15, в котором радиоимпульсы на частотах f0+fпр+mnΔf+Fдnm (где Fдnm - доплеровская добавка частоты при отражении n-го импульса m-й пачки от ВО, обусловленная наличием у ВО радиальной составляющей скорости [5, 6]) поступают на 1-й вход 2-го смесителя 14, на второй вход которого поступает сигнал несущей частоты f0 с выхода ГНЧ 6. На выходе 2-го смесителя 14 формируются радиосигналы с частотами, равными разности частот на его 1-м и 2-м входах. Значит, отраженный от ВО радиоимпульс с номером n в пределах m-й пачки после прохождения блока 14 будет иметь частоту fпр+mnΔf+Fдnm. Сигналы с выхода 2-го смесителя 14 с основной промежуточной частотой fпр поступают на вход широкополосного УПЧ 18, который производит их основное усиление. Полоса пропускания УПЧ 18 должна быть широкой и занимать диапазон от fпр до fпр+NMΔf+Fдmax, где Fдmax - максимально возможная доплеровская частота отраженного сигнала.
После основного усиления в УПЧ 18 каждый принятый сигнал поступает одновременно на первый вход 1-го ФД 19 и 1-й вход 2-го ФД 23. Опорным напряжением для 2-го ФД 23 является гармонический сигнал с выхода когерентного гетеродина 12. Этот гармонический опорный сигнал поступает на 2-й вход ФД 23. Этот же гармонический сигнал, пройдя ФВ 21, изменив при этом начальную фазу на π/2, поступает в качестве опорного на 2-й вход 1-го ФД 19. Когерентный гетеродин 12 запускается в каждом периоде повторения Ти сигналом с выхода 1-го смесителя 3. Назначение когерентного гетеродина состоит в постоянной выработке опорного гармонического сигнала с частотой и начальной фазой, соответствующими сигналу запуска гетеродина. То есть когерентный гетеродин 12 в каждом периоде повторения Ти фазируется сформированным сигналом с выхода блока 3 и сохраняет строгую внутреннюю когерентность до прихода следующего сигнала, навязывающего ему свою частоту и начальную фазу [5-8]. Фазовые детекторы предназначены для выделения синусной (Im) и косинусной (Re) составляющих отраженного объектом сигнала. Поскольку излучение зондирующего сигнала в каждом периоде ведется на своей уникальной частоте, то и опорное напряжение фазовых детекторов должно соответствовать в каждом периоде этой частоте. Правильное фазирование обоих ФД обеспечивается применением когерентного гетеродина 12. Сигналы на выходах 1-го и 2-го фазовых детекторов будут являться синхронными квадратурными составляющими.
С выходов ФД 19 и 23 квадратурные составляющие отраженного сигнала поступают на соответствующие АЦП 20 и 24, предназначенные для перевода квадратурных составляющих в цифровую форму. С выходов 1-го АЦП 20 и 2-го АЦП 24 оцифрованные значения квадратурных составляющих поступают соответственно на 1-й и 2-й входы ВУ 22. Вычислительное устройство 22 создается на элементах цифровой вычислительной техники. В качестве ВУ 22 может быть также использован специализированный микропроцессор, выполняющий математические операции [9].
Поскольку у каждого сигнала имеется свой номер, соответствующий номеру периода повторения, в котором использован зондирующий сигнал уникальной частоты, то при приеме и обработке каждый сигнал также может быть пронумерован индексами m и n. Это позволяет создать в блоке 22 массив цифровых данных U вида
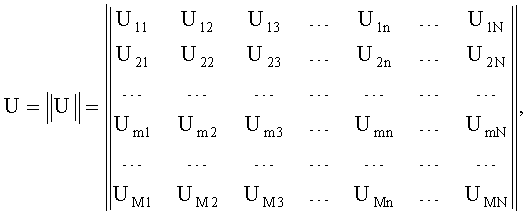
где  - амплитуда n-го отраженного сигнала из m-й пачки; Remn и Immn - соответственно косинусная и синусная составляющие отраженного ВО сигнала, имеющего номер n в пределах m-й пачки из N импульсов.
- амплитуда n-го отраженного сигнала из m-й пачки; Remn и Immn - соответственно косинусная и синусная составляющие отраженного ВО сигнала, имеющего номер n в пределах m-й пачки из N импульсов.
Заметим, что в первой строке массива U размещены амплитуды отраженных сигналов, полученные при изменении частоты от импульса к импульсу на величину Δf, т.е. сигналы первой отраженной пачки (m=1). Во второй строке размещены амплитуды сигналов второй отраженной пачки (m=2) с шагом перестройки частоты от импульса к импульсу (разносом по частоте) 2Δf. В m-й строке массива будут записаны амплитуды отражений, полученные при изменении частоты зондирования от импульса к импульсу на величину mΔf. В последней строке массива значения элементов соответствуют изменению частоты зондирования от импульса к импульсу на NΔf.
Данные массива U используются в ВУ 22 для проведения классификации ВО. Классификация основана на зависимости степени флюктуации амплитуды отраженного сигнала от размеров ВО [10]. Чем крупнее объект, тем сильнее изменяется амплитуда отраженного сигнала при изменении частоты зондирования и при изменении ракурса локации ВО при ТН полета [6].
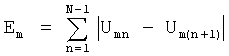
Для формирования признака классификации на первом этапе на основе величин элементов каждой m-й строки массива U вычисляется сумма Еm, разностей амплитуд сигналов, полученных при изменении частоты зондирования на одинаковую величину. Для этого используется выражение
 ,
,
где индекс «m» при Еm означает, что вычисленная сумма разностей относится к m-й строке массива U и соответствует расчету разностей смежных амплитуд отраженных сигналов, записанных в m-ю строку массива и полученных при изменении частоты зондирования на mΔf.
На втором этапе вычисляется итоговое значение признака классификации по формуле
 .
.
Рассчитанный признак классификации объектов Е учитывает средний уровень изменения амплитуды отраженных сигналов (при одинаковом изменении ракурса локации ВО) при использовании перестройки частоты зондирования от импульса к импульсу на различную величину от Δf до MΔf. Важным фактором является то, что суммы разностей формируются в одинаковых условиях, т.е. при одинаковой скорости изменения ракурса локации ВО, совершающего полет с ТН в турбулентной атмосфере.
Далее рассчитанное значение признака Е сравнивается с набором пороговых значений. Пороги подаются в порядке увеличения, что соответствует увеличению габаритов ВО. При превышении признаком Е определенного порога принимается решение об отнесении ВО к определенному классу. Результаты классификации с выхода ВУ 22 поступают на УО 4, которое предназначено для индикации результатов и доведения их до потребителя информации о классе объекта.
Сущность изобретения заключается в следующем. Флюктуации амплитуд отраженных сигналов всегда обусловлены интерференцией волн, отраженных отдельными РЦ поверхности объектов [1, 6, 11]. При одночастотном зондировании флюктуации амплитуд могут быть вызваны изменением взаимных расстояний между РЦ в радиальном направлении, что может быть следствием изменения ракурса локации ВО, если он испытывает в полете ТН в виде рысканий, тангажей и кренов [12]. Однако в определенных условиях, особенно на малых курсовых углах в период зондирования объекта ВО может сохранять относительную стабильность своего положения по отношению к радиолокатору. В таких условиях низкочастотные флюктуации амплитуд отраженных сигналов не наблюдаются (предполагается, что высокочастотные флюктуации амплитуд, обусловленные турбовинтовым эффектом, скомпенсированы известными методами [13]). Вторым фактором, вызывающим амплитудные флюктуации отраженных сигналов, является перестройка частоты зондирования. Однако оптимальный шаг перестройки частоты от импульса к импульсу, необходимый для классификации объектов, до сих пор не установлен. По этой причине предлагается использовать при классификации разные величины шагов перестройки (в предлагаемом устройстве от Δf до МΔf), а признак классификации формировать методом усреднений результатов, полученных при разных величинах перестройки частоты, усиливая физическую сущность признака дополнительным использованием изменений ракурса локации воздушного объекта в интервале его зондирования последовательностью радиоимпульсов.
Новые элементы схемы устройства классификации (импульсный генератор, линии задержки, умножители частоты, смеситель, генератор несущей частоты и когерентный гетеродин) являются известными и широко применяющимися в современных радиолокационных устройствах [5-8, 10-12], в том числе в устройствах классификации (распознавания) [1]. Предполагается, что 1-й смеситель 3 на самом деле имеет всего два основных входа, т.е. первые М входов в дальнейшем объединяются с помощью типовых устройств сверхвысокой частоты (волноводные тройники, направленные ответвители, щелевые мосты, кольцевые мосты и т.п.).
Как следует из описания, предлагаемое устройство классификации ВО с ТН движения имеет преимущество перед прототипом [2], выраженное в том, что классификация проводится с использованием более информативного признака. Этот признак основан на усреднении амплитудных флюктуаций, вызванных тремя факторами: изменением ракурса объекта, изменением частоты зондирования, изменением шага перестройки частоты от импульса к импульсу.
Источники информации
1. Небабин В.Г., Сергеев В.В. Методы и техника радиолокационного распознавания. - М.: Радио и связь, 1984. с.79, рис.3.21 (аналог).
2. Патент РФ №2144681. МПК7 G01S 13/02. Устройство распознавания воздушных целей двухчастотным способом. Бондарев Л.А., Жигунов П.А., Васильченко О.В., Гуреев А.К., Чагрин А.С. Заявка №99110296. Приоритет 19.05.1999. Опубл. 20.01.2000 (прототип).
3. Финкельштейн М.И. Основы радиолокации. - М.: Радио и связь, 1983. 536 с.
4. Доброленский Ю.П. Динамика полета в неспокойной атмосфере. - М.: Машиностроение, 1969. 256 с.
5. Радиоэлектронные системы. Справочник. Основы построения и теория / Под ред. Я.Д.Ширмана. - М.: Радиотехника. 2007. 510 с.
6. Теоретические основы радиолокации / Под ред. Я.Д.Ширмана. - М.: Сов. радио, 1970. 560 с.
7. Справочник по основам радиолокационной техники / Под ред. В.В.Дружинина. М.: Воениздат. 1967. 768 с.
8. Справочник по радиолокации. Под ред. М.И.Сколника. Пер. с англ. - М.: Сов. радио, 1967. Т.1. Основы радиолокации. - 456 с.
9. Дроздов Е.А. и др. Многопрограммные цифровые вычислительные машины. - М.: Высшая школа, 1985, с.243-247.
10. Охрименко А.Е. Основы радиолокации и радиоэлектронная борьба. Ч.1. Основы радиолокации. М.: Воениздат, 1983. 456 с.
11. Ширман Я.Д., Горшков С.А., Лещенко С.П., Братченко Г.Д., Орленко В.М. Методы радиолокационного распознавания и их моделирование // Зарубежная радиоэлектроника, 1996. №11. С.3-62.
12. Бартон Д., Вард Г. Справочник по радиолокационным измерениям. Пер. с англ. / Под ред. М.М.Вейсбейна. - М.: Сов. радио, 1976. 392 с.
13. Митрофанов Д.Г., Прохоркин А.Г. Методы компенсации влияния составляющих турбинного эффекта при построении изображений воздушных целей // Радиотехника, 2006. №9. С.32-37.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С ПОИМПУЛЬСНОЙ ПЕРЕСТРОЙКОЙ НЕСУЩЕЙ ЧАСТОТЫ, НЕЙРОСЕТЕВЫМ РАСПОЗНАВАНИЕМ ОБЪЕКТОВ И ИНВЕРСНЫМ СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ АНТЕННЫ | 2011 |
|
RU2439611C1 |
| УСТРОЙСТВО КЛАССИФИКАЦИИ РАДИОЛОКАЦИОННЫХ ОБЪЕКТОВ НАБЛЮДЕНИЯ ПО ИНТЕНСИВНОСТИ АМПЛИТУДНЫХ ФЛЮКТУАЦИЙ | 2010 |
|
RU2425395C2 |
| СПОСОБ ИЗМЕРЕНИЯ РАДИАЛЬНОЙ СКОРОСТИ ВОЗДУШНОЙ ЦЕЛИ В РЕЖИМЕ ПЕРЕСТРОЙКИ ЧАСТОТЫ ОТ ИМПУЛЬСА К ИМПУЛЬСУ | 2007 |
|
RU2326402C1 |
| УСТРОЙСТВО РАДИОЛОКАЦИОННОГО РАСПОЗНАВАНИЯ ЦЕЛЕЙ НА ФОНЕ ПОМЕХ | 1998 |
|
RU2139552C1 |
| УСТРОЙСТВО РАСПОЗНАВАНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ С АДАПТИВНЫМ ВЫБОРОМ МОМЕНТА АНАЛИЗА ОТРАЖЕННОГО СИГНАЛА | 2008 |
|
RU2377596C1 |
| МНОГОЧАСТОТНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С ИНВЕРСНЫМ СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ И ДВУХУРОВНЕВЫМ РАСПОЗНАВАНИЕМ ЦЕЛЕЙ | 2007 |
|
RU2358288C1 |
| УСТРОЙСТВО РАСПОЗНАВАНИЯ ВОЗДУШНЫХ ЦЕЛЕЙ | 1996 |
|
RU2096803C1 |
| РАДИОЛОКАЦИОННОЕ УСТРОЙСТВО ОБНАРУЖЕНИЯ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2024 |
|
RU2833132C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С ПЕРЕСТРОЙКОЙ ЧАСТОТЫ, ИНВЕРСНЫМ СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ И ДВУХУРОВНЕВЫМ НЕЙРОСЕТЕВЫМ РАСПОЗНАВАНИЕМ ОБЪЕКТОВ ПО СОВОКУПНОСТИ ПРИЗНАКОВ | 2009 |
|
RU2412451C1 |
| РАДИОЛОКАЦИОННОЕ УСТРОЙСТВО РАСПОЗНАВАНИЯ СИГНАЛОВ | 1996 |
|
RU2095826C1 |
Изобретение относится к совмещенным однопозиционным радиолокационным системам и предназначено для автоматизированной классификации воздушных объектов, совершающих полет с траекторными нестабильностями в турбулентных слоях атмосферы. Достигаемый технический результат - повышение вероятности правильной классификации воздушных объектов, испытывающих случайные колебания по углам рыскания, тангажа и крена в процессе облучения последовательностью зондирующих радиоимпульсов на разных частотах. Указанный результат достигается тем, что в состав известного устройства классификации объектов дополнительно вводят импульсный генератор, блок линий задержки, содержащий (М-1) линий задержки, где М - число используемых импульсных последовательностей, отличающихся шагом перестройки частоты от импульса к импульсу, блок умножителей частоты, содержащий (М-1) умножителей частоты, третий смеситель, генератор несущей частоты и когерентный гетеродин. При этом соответствующим образом изменяются межблочные связи и принцип функционирования устройства классификации. 2 ил.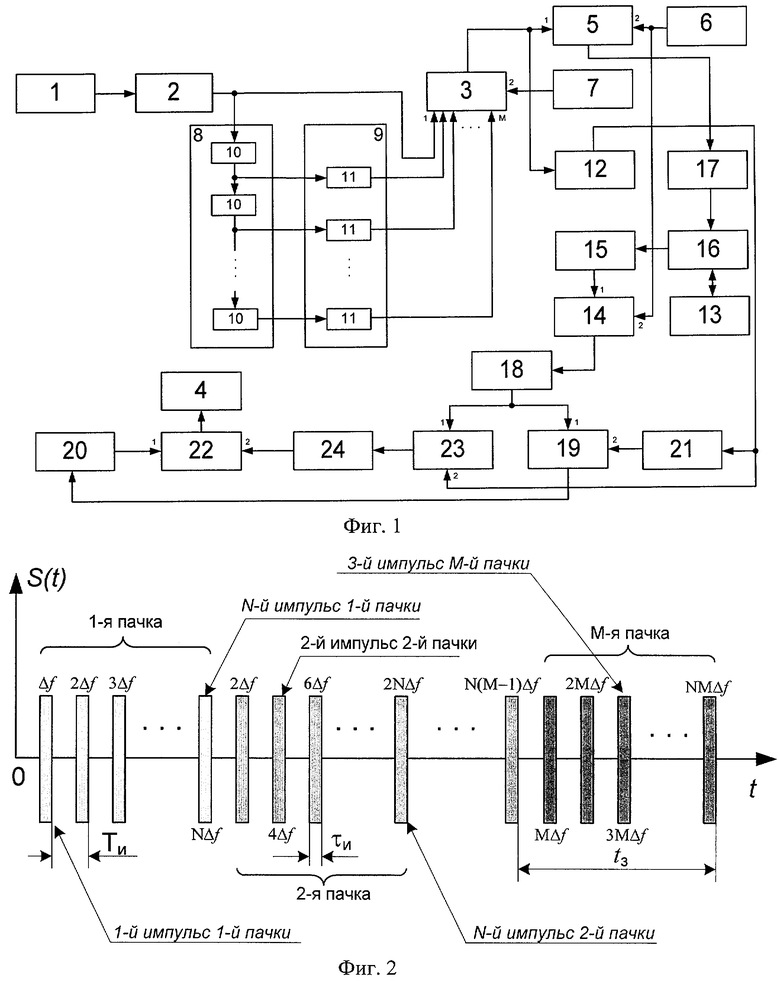
Устройство классификации воздушных объектов с траекторными нестабильностями движения, включающее в свой состав антенну, блок гетеродинов, первый смеситель, задающий генератор, соединенный своим выходом с вторым входом первого смесителя, последовательно соединенные усилитель мощности, антенный переключатель, усилитель высокой частоты, второй смеситель, усилитель промежуточной частоты, выход которого подключен к первому входу первого фазового детектора и первому входу второго фазового детектора, выход которого связан со входом второго аналого-цифрового преобразователя, выход которого соединен со вторым входом вычислительного устройства, выход которого подключен ко входу устройства отображения, а первый вход - к выходу первого аналого-цифрового преобразователя, при этом вычислительное устройство предназначено для формирования признака классификации, учитывающего средний уровень изменения амплитуды отраженных сигналов от воздушного объекта при разных величинах перестройки частоты и с учетом изменения ракурса локации воздушного объекта в интервале его зондирования последовательностями радиоимпульсов, с последующим сравнением признака классификации с набором пороговых значений, при превышении признаком классификации определенного порогового значения принимают решение об отнесении воздушного объекта к определенному классу, вход первого аналого-цифрового преобразователя соединен с выходом первого фазового детектора, второй вход которого подключен к выходу фазовращателя, причем антенна своим вход-выходом связана с вход-выходом антенного переключателя, отличающееся тем, что в его состав дополнительно вводят импульсный генератор, третий смеситель, генератор несущей частоты, когерентный гетеродин, блок линий задержки, состоящий из (М-1) линий задержки, где М - число используемых импульсных последовательностей, отличающихся шагом перестройки частоты заполнения от импульса к импульсу и формируемых на выходах линий задержки, а также блок умножителей частоты, состоящий из (М-1) умножителей частоты, причем умножитель частоты с номером «m», где  , имеет коэффициент умножения частоты, равный (m+1), при этом выход импульсного генератора соединяют со входом блока гетеродинов, состоящего из набора гетеродинов и коммутатора, переключающего выход очередного гетеродина к выходу блока гетеродинов, при этом выход блока гетеродинов подключают к первому из М первых входов первого смесителя и ко входу первой линии задержки из состава блока линий задержки, выход каждой m-й с первой по (М-2)-ю линии задержки связывают со входом соответствующей (m+1)-й линии задержки и входом соответствующего m-го умножителя частоты из состава блока умножителей частоты, выход (М-1)-й линии задержки подключают ко входу (M-1)-го умножителя частоты из состава блока умножителей частоты, выход каждого m-го из (М-1) умножителей частоты связывают с соответствующим (m+1)-м из М первых входов первого смесителя, выход которого соединяют с первым входом третьего смесителя и входом когерентного гетеродина, выход которого подключают к входу фазовращателя и второму входу второго фазового детектора, выход генератора несущей частоты связывают со вторым входом второго смесителя и вторым входом третьего смесителя, выход которого подключают к входу усилителя мощности.
, имеет коэффициент умножения частоты, равный (m+1), при этом выход импульсного генератора соединяют со входом блока гетеродинов, состоящего из набора гетеродинов и коммутатора, переключающего выход очередного гетеродина к выходу блока гетеродинов, при этом выход блока гетеродинов подключают к первому из М первых входов первого смесителя и ко входу первой линии задержки из состава блока линий задержки, выход каждой m-й с первой по (М-2)-ю линии задержки связывают со входом соответствующей (m+1)-й линии задержки и входом соответствующего m-го умножителя частоты из состава блока умножителей частоты, выход (М-1)-й линии задержки подключают ко входу (M-1)-го умножителя частоты из состава блока умножителей частоты, выход каждого m-го из (М-1) умножителей частоты связывают с соответствующим (m+1)-м из М первых входов первого смесителя, выход которого соединяют с первым входом третьего смесителя и входом когерентного гетеродина, выход которого подключают к входу фазовращателя и второму входу второго фазового детектора, выход генератора несущей частоты связывают со вторым входом второго смесителя и вторым входом третьего смесителя, выход которого подключают к входу усилителя мощности.
| УСТРОЙСТВО РАСПОЗНАВАНИЯ ВОЗДУШНЫХ ЦЕЛЕЙ ДВУХЧАСТОТНЫМ СПОСОБОМ | 1999 |
|
RU2144681C1 |
| СПОСОБ РАСПОЗНАВАНИЯ КЛАССА ВОЗДУШНОЙ ЦЕЛИ | 1999 |
|
RU2150715C1 |
| СПОСОБ СОПРОВОЖДЕНИЯ ГРУППОВОЙ ВОЗДУШНОЙ ЦЕЛИ | 2006 |
|
RU2324952C1 |
| US 4647931 A, 03.03.1987 | |||
| US 3614779 A, 19.10.1971 | |||
| US 4217583 A, 12.08.1980 | |||
| WO 2006133268 A2, 14.12.2006. | |||

