Область техники
Настоящие изобретение относится к новому типу устройств управления, использующих в качестве данных, получаемых от пользователя, положение рук на манипуляторе.
Предшествующий уровень техники
Устройства управления, манипуляторы, кнопки и датчики движения существуют в большом разнообразии и используются для получения данных от действий пользователя. Это могут быть простые датчики, такие как кнопки, тачпады, цифровые ручки, аналоговые ручки управления, и более сложные конструкции с возможностью позиционировать в трехмерном пространстве, такие как гироскопы, или сложные механические устройства, отслеживающие движения манипулятора. Даже если они используются все вместе в одном устройстве, они обладают недостатками.
Основная проблема всех манипуляторов по сравнению с заявленным изобретением заключается в том, что они не только не могут, но и не предназначены для определения положения руки на самом манипуляторе. Основа действия всех манипуляторов - это ввод данных уже после того, как пользователь взял в руки манипулятор.
Все устройства реализуют способ активного управления, требуя от пользователя каких-либо действий на специализированное устройство или поверхность, при этом игнорируются неактивные участки руки во время работы.
Другая проблема, в частности, это относится к сложным устройствам позиционирования в трехмерном пространстве, - это их сложность, громоздкость, высокая стоимость и неудобство при использовании.
Отслеживание перемещения с помощью гироскопов создает следующие трудности: отслеживания недостаточно точные. Отслеживание может происходить, только если манипулятор находится в свободном трехмерном пространстве, что исключает возможность работы на двухмерной поверхности как с обычными устройствами ввода.
Отслеживание по перемещению манипулятора в держателе. Данный способ неудобен и сложен, так как отслеживается перемещение самого манипулятора через дополнительный держатель, а не руки по нему.
Гироскоп или другое устройство отслеживания, например устройство визуального анализа и сравнения, отслеживает положение и изменения самого манипулятора в пространстве. Заявленный способ предлагает независимо использовать для ввода анализ положения руки на устройстве ввода.
Еще одна проблема заключается в том, что системы управления сложно использовать вместе, так как они все рассчитаны на какие-либо прямые действия от пользователя, что не дает возможности использовать их все одновременно, так как для этого просто не хватит пальцев и места для размещения датчиков на манипуляторе.
Известен способ анализа положения руки на сенсорных покрытиях и сенсорных экранах: от более простых с определением количества пальцев до сложных, т.е. анализа каждого пальца для написания символов и команд. Однако все они предназначены для анализа активной информации от пользователя. По сути они просто дорабатывают обычный тачпад, добавляя все осложняющие функции как для производства такого оборудования, так и для самих пользователей.
Например, в патентах US 5856824, US 7038659, US 582535 раскрыто использование руки или отдельных пальцев для сенсорного экрана с возможностью идентификации каждого пальца для выполнения запрограммированных действий или просто для определения их количества. Эти подходы неинтуитивны, сложны, не учитывается положение самой руки на устройстве, а используется подход как и в других устройствах, т.е. осуществляют отслеживание перемещения объекта по специально предназначенной поверхности, такой как тачпад или сенсорный экран, такая поверхность, в свою очередь, проигрывает другим устройствам ввода, так как требует специального ухода, защиты от царапин, не может содержать выпуклых и движущихся элементов, и делать клики на сенсорном экране не только неудобно, но, кроме того, требует сложных вычислений для системы и создает лишние неудобства для пользователя. Сенсорный экран, как бы он ни использовался, требует также расположения на видимой части для пользователя поверхности или курсора на экране для передачи пользователю поступающих сигналов.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Технической задачей настоящего изобретения является создание способа управления, представляющего собой не только продвинутую версию других способов управления, но новый вид управления. Способ пассивного управления предоставляет совершено новый интуитивный и простой подход с возможностью использования как самостоятельно, так и по совместительству с любой другой технологией, предоставляя новую ось контроля управления. Особенность использования в совокупности с другими устройствами в том, что способ пассивного управления не требует каких-либо дополнительных действий от пользователя при использовании других устройств управления, так как они работают все в режиме активного управления, отслеживая действия пользователя на определенные датчики ввода.
Управление по анализу, каким образом потребитель берет в руки манипулятор и удерживает его во время работы, открывает новую область управления. Подача сигналов осуществляется устройством еще до того, как пользователь сделал какие-либо действия.
Датчики, используемые для определения положения, каким образом удерживается манипулятор, могут быть использованы как обыкновенные устройства активного управления, но с новыми возможностями, так как чувствительная поверхность для управления может покрывать весь корпус устройства управления, при этом переключение работы может зависеть от отслеживания положения руки или отдельных пальцев на устройстве.
Возможные реакции на то, как пользователь удерживает устройство, зависят от типа устройства. Если это простейшее устройство, то все управление может заключаться в том, чтобы взять устройство правильным образом, чтобы активировать его в нужном режиме. Если это сложный манипулятор, то удерживание манипулятора может менять режим работы устройства. Другой вариант, в котором система анализирует положение руки, и в случае взятия манипулятора определенным образом, может переключить использование датчиков из режима определения положения руки в режим обычной работы и использовать как обычные активные средства управления.
Другой вариант - использовать одни и те же датчики для пассивного и активного управления одновременно, при этом положение руки на устройстве используется для пассивного управления, а положения пальцев, измеряемые теми же датчиками, для активного управления.
Способ пассивного управления состоит в управлении средством удерживания, т.е. охвата устройства пользователем, и содержит использование датчиков разных типов, способных определять положения устройства при управлении потребителем, причем датчики могут быть как цифровыми, так и аналоговыми фиксаторами, при этом он может быть обычной кнопкой, курком, сенсорной поверхностью или тачпадом; один датчик может выполнять простые функции, такие как определение давления в той области, где он находится, и сложные вычисления, например, охватывать всю поверхность корпуса устройства, отслеживая при этом давления, например, каждого пальца с двух рук, причем датчики могут находиться необязательно на самом манипуляторе, они могут находиться на пользователе или на том, чем он осуществляет контроль с манипулятором, например в перчатках на руках или на пальцах, либо использование внешних датчиков, таких как фото-видео, анализируя визуально и обрабатывая, каким образом производится работа с устройством потребителем.
Система или устройства, выполняющие действия на полученных данных от датчиков, могут обеспечивать просто механическую функцию, или это может быть сложная система анализа данных с каждого датчика с определением источника. При необходимости может производиться калибровка устройства, само обучение или идентификация пользователя по показанию датчиков. Датчики могут использоваться как в пассивном режиме определения положения руки для переключения функции манипулятора, так и сами использоваться в качестве устройства активного ввода. При этом система может анализировать, какая часть руки является более активной, а какая менее активной для привязки им разных действий.
Выше описан общий основной принцип работы системы, ниже изобретение поясняется подробным описанием для лучшего понимания.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
В дальнейшем изобретение поясняется описанием предпочтительных вариантов воплощения со ссылками на сопровождающие чертежи, на которых:
фиг.1 изображает устройство типа ручки (обычная и компьютерная), содержащей покрытие, реагирующей на перемещение руки пользователя по ручке, согласно изобретению;
фиг.2а, 2b - общие виды устройства в форме ручки плоской формы с сенсорным покрытием на поверхности типа тачпад, согласно изобретению;
фиг.3 - варианты размещения на разных типах устройств полного сенсорного покрытия, улавливающего движения пользователя, согласно изобретению;
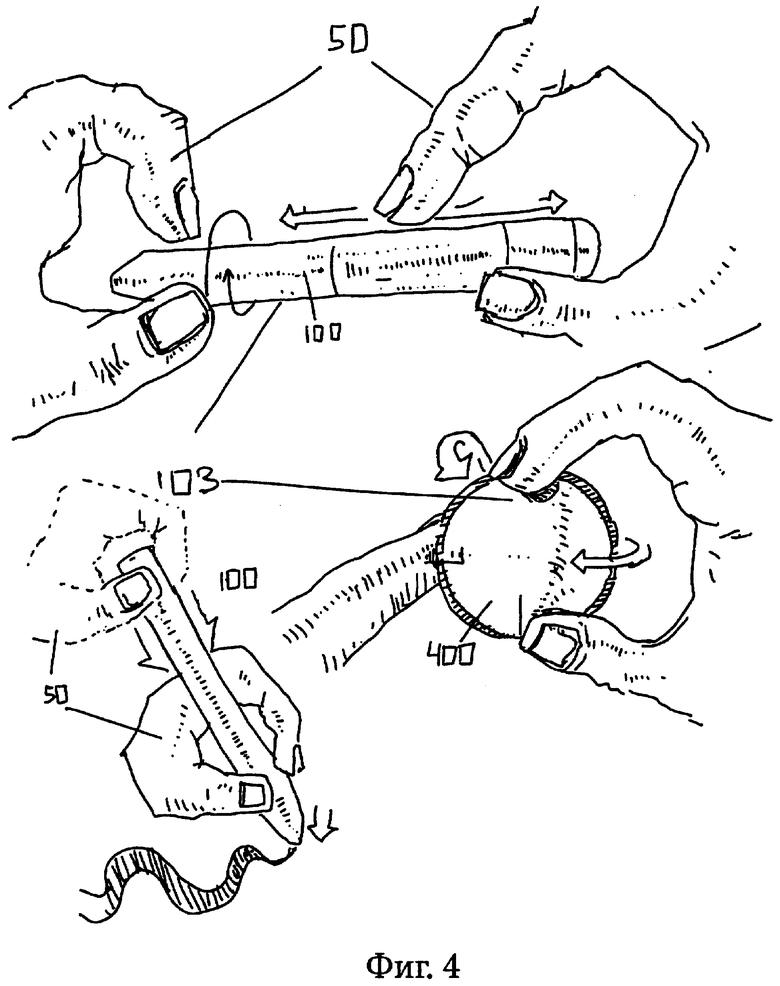
фиг.4 - варианты использования покрытия, покрывающего поверхность устройства, согласно изобретению;
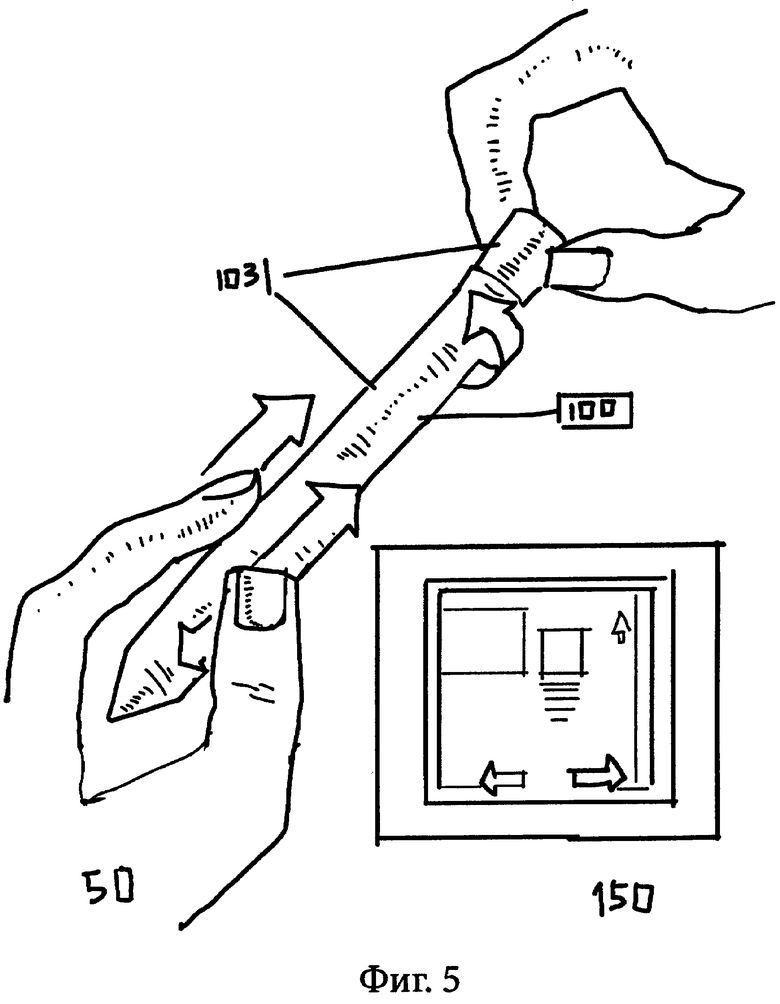
фиг.5 - использование поверхности ручки с покрытием в качестве прокрутки, согласно изобретению;
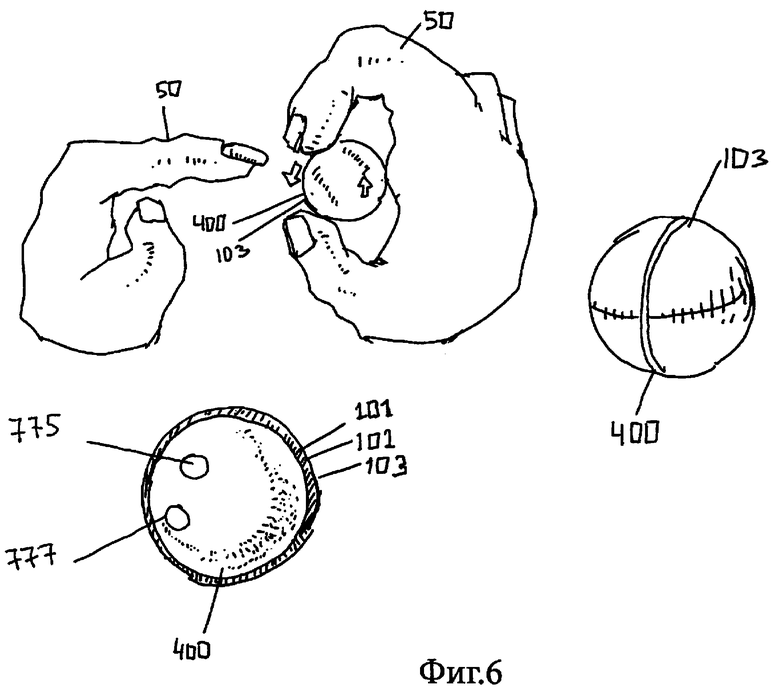
фиг.6 - новый тип устройств на основе технологии в форме шара с несенсорным покрытием, определяющий положение руки на шаре, согласно изобретению;
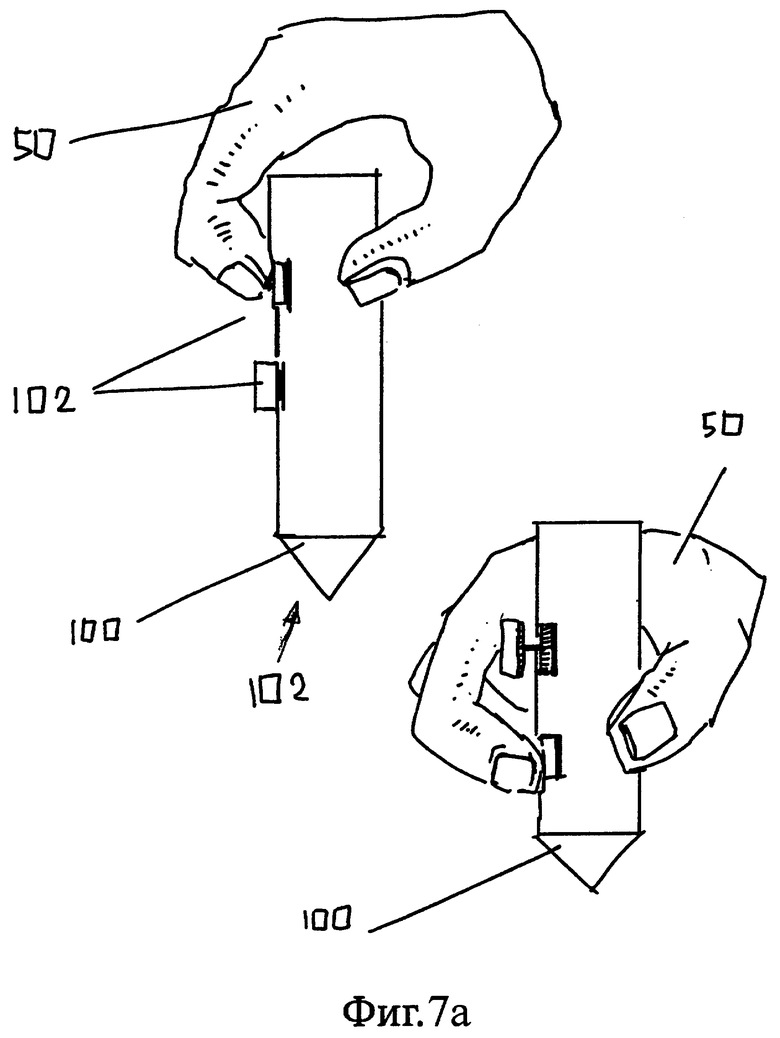
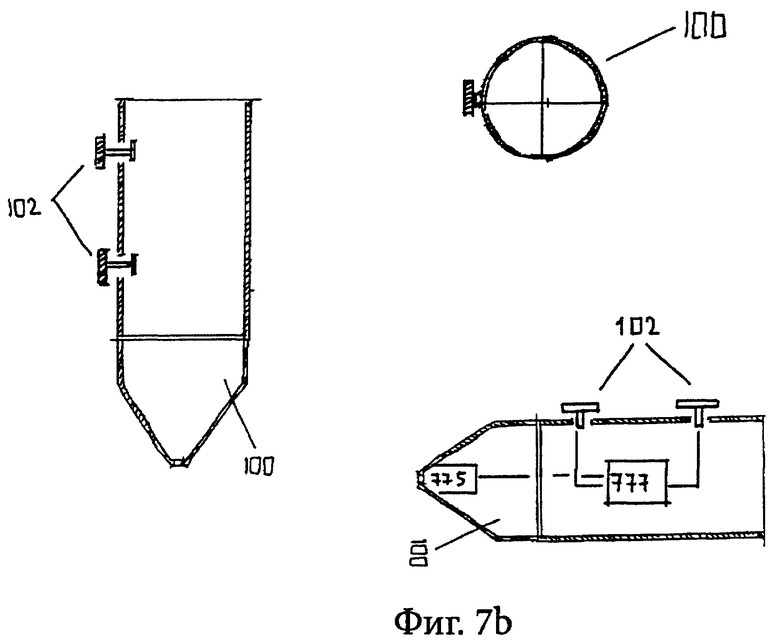
фиг.7а - пример устройства из двух триггеров, согласно изобретению;
фиг.7b - пример работы устройства пассивного управления, согласно изобретению;
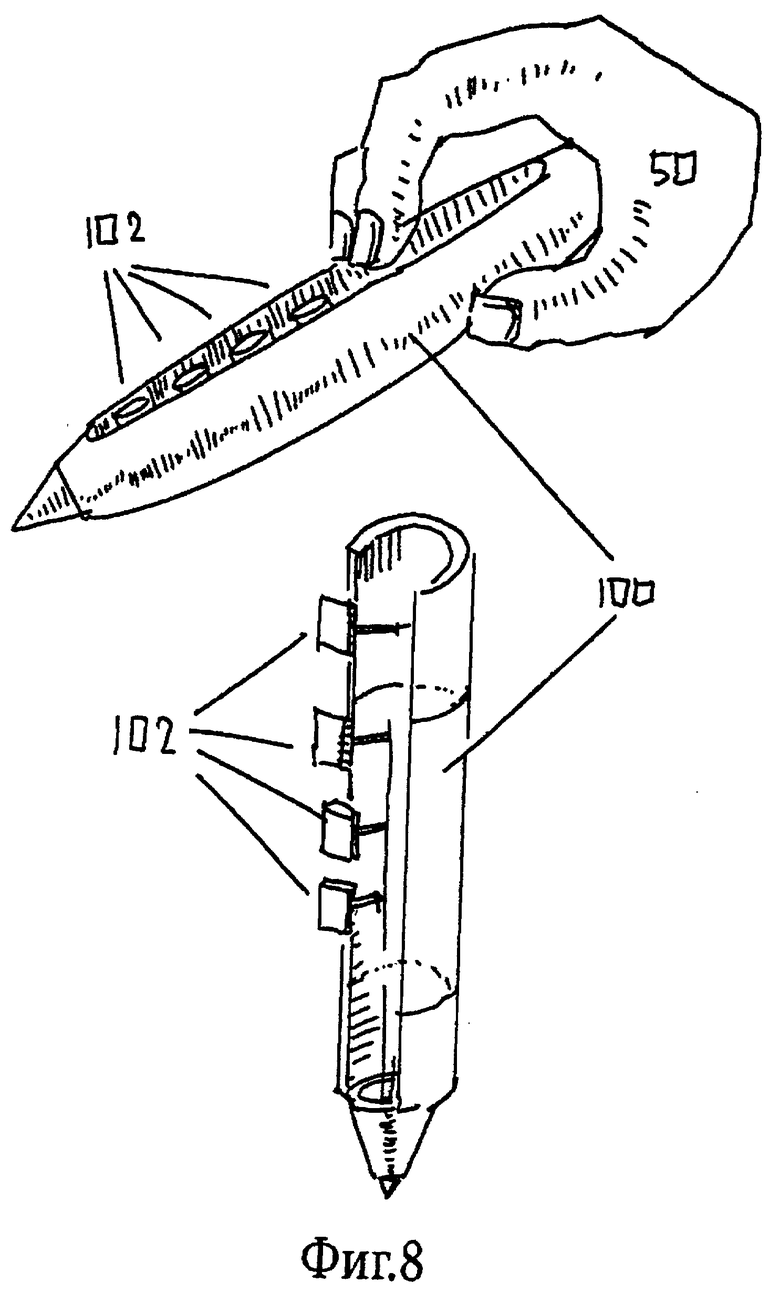
фиг.8 - пример использования множества датчиков для более детального контроля и определения положения руки, согласно изобретению;
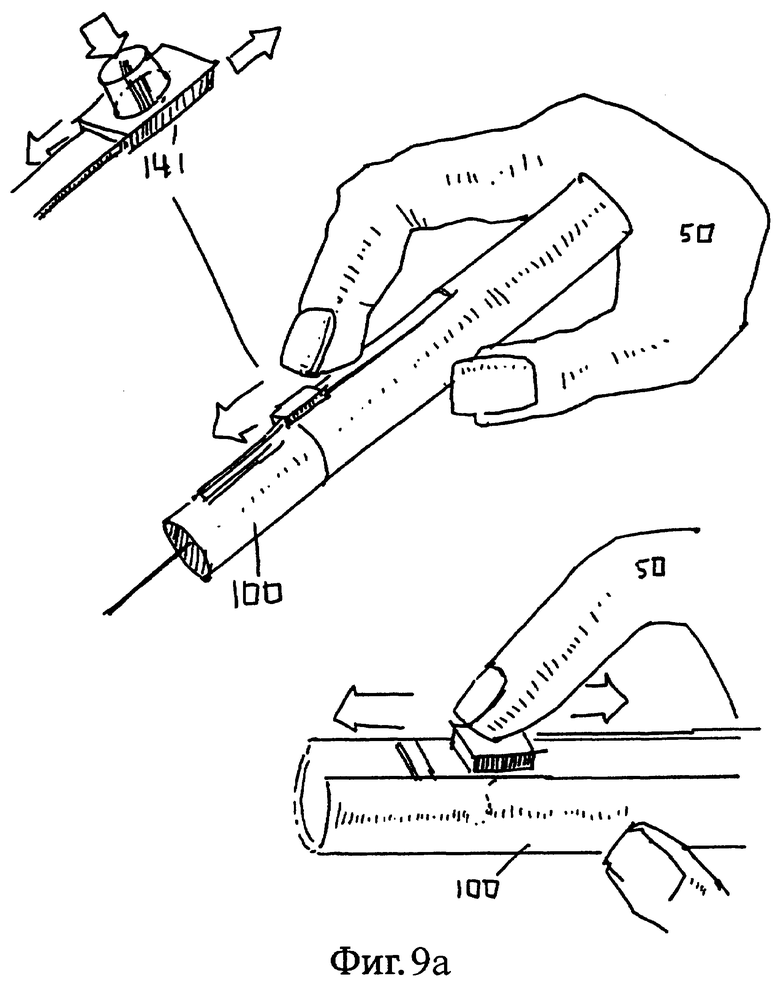
фиг.9а - датчик для определения положения руки на подвижной основе, согласно изобретению;
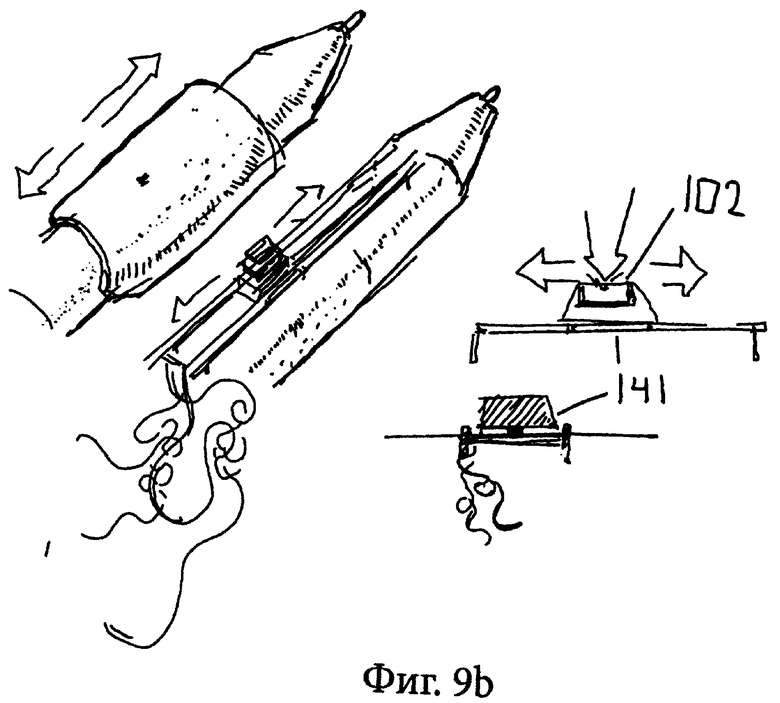
фиг.9b - модификации датчика на подвижной основе, согласно изобретению;
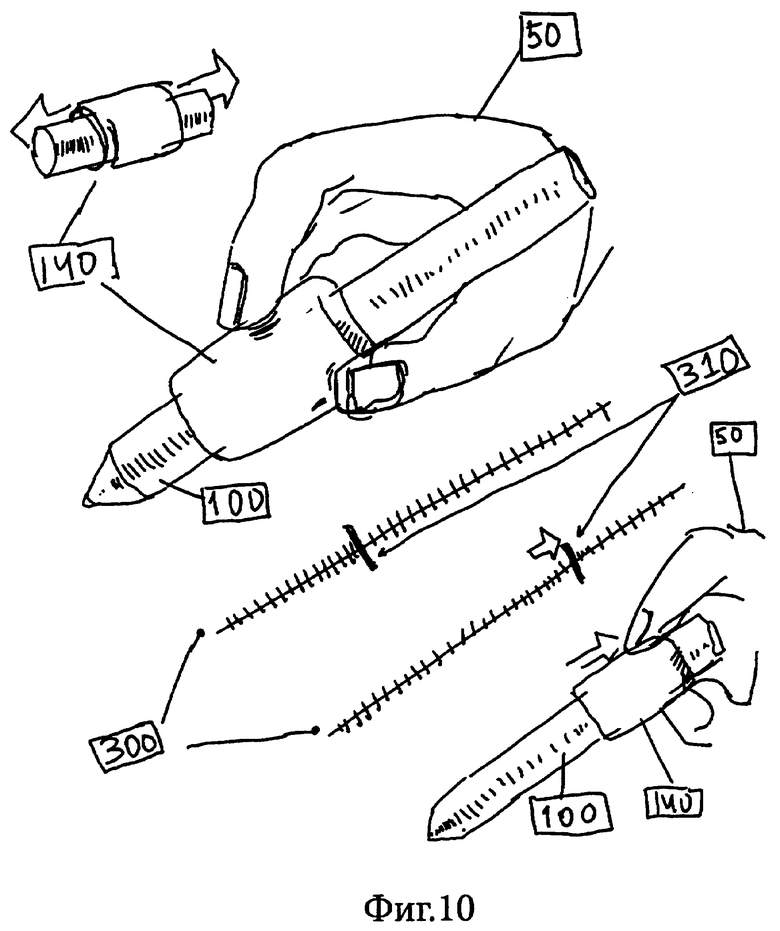
фиг.10 - вариант модификации датчика на подвижной основе, согласно изобретению;
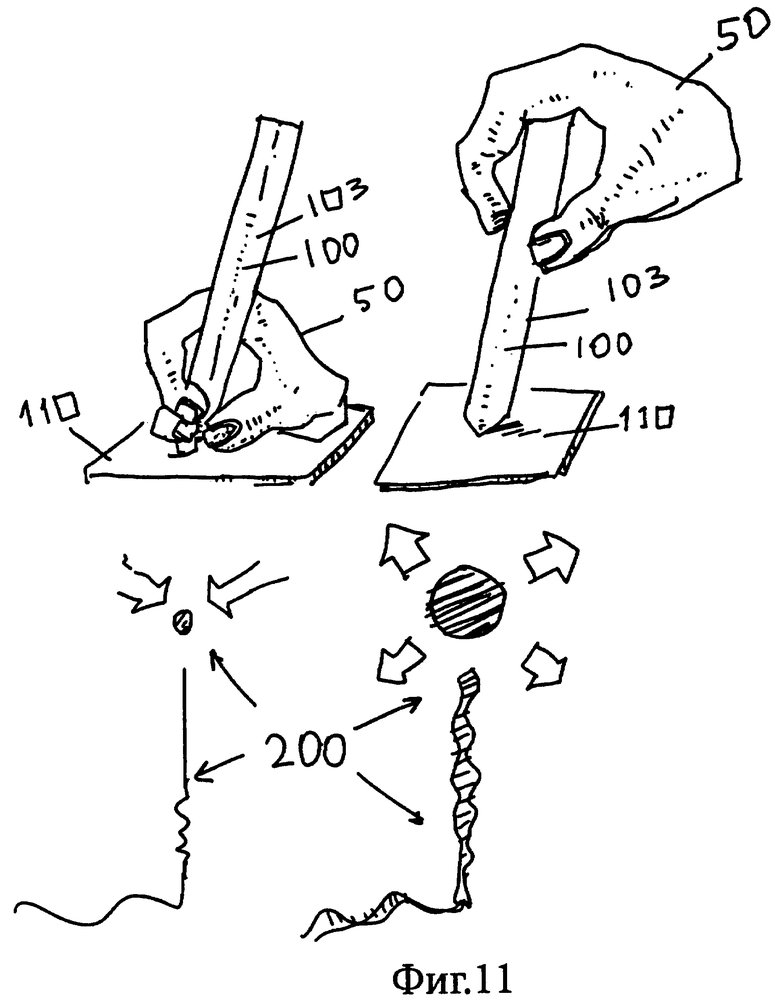
фиг.11 - использование устройства типа ручки с датчиками на поверхности, согласно изобретению;
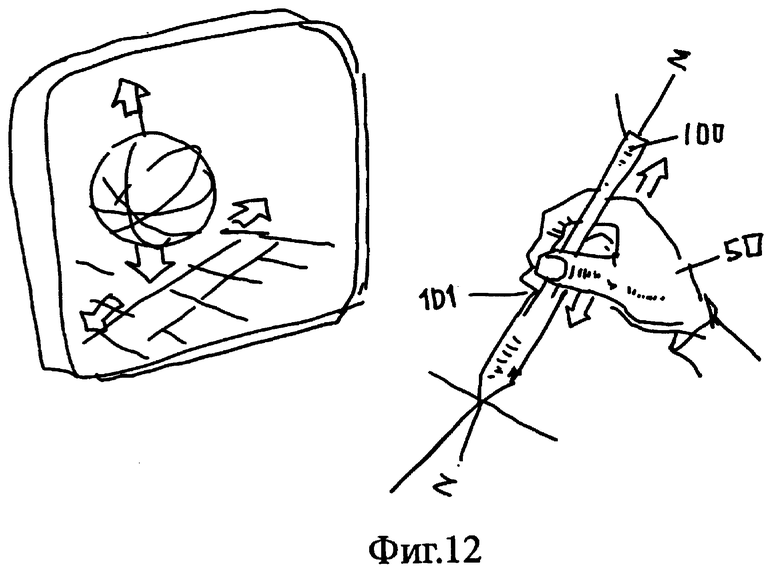
фиг.12 - использование положения руки в качестве дополнительной оси контроля, согласно изобретению;
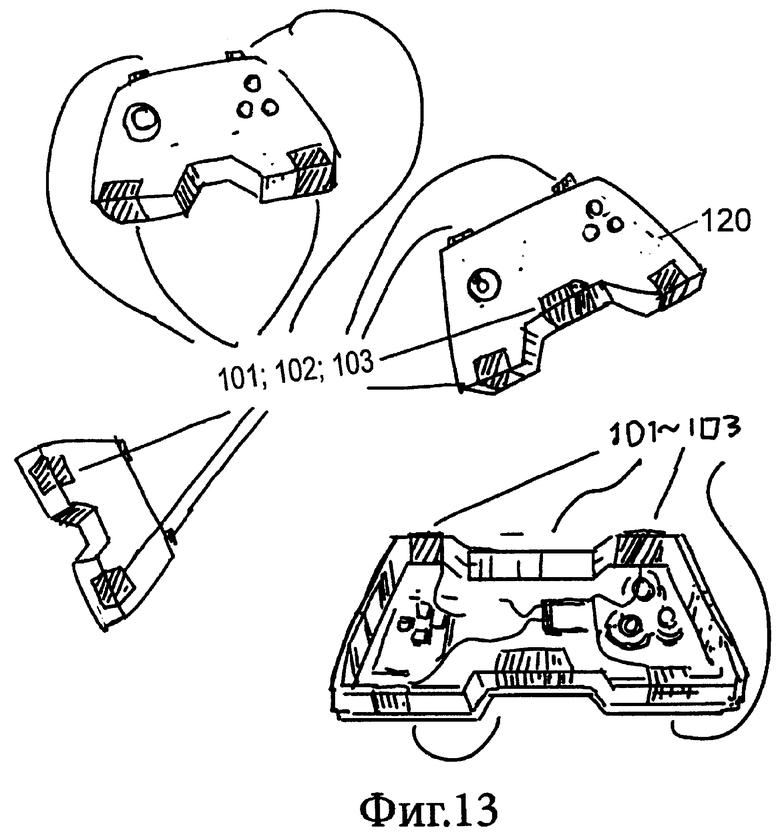
фиг.13 - возможное размещение датчиков на поверхности игрового контроллера, согласно изобретению;
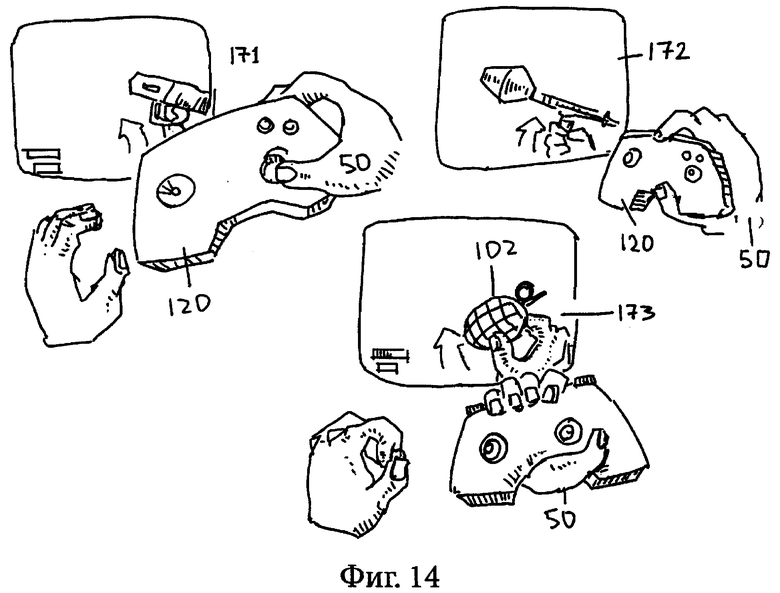
фиг.14 - использование системы с датчиками, размещенными на игровом контроллере в игровом приложении, согласно изобретению;
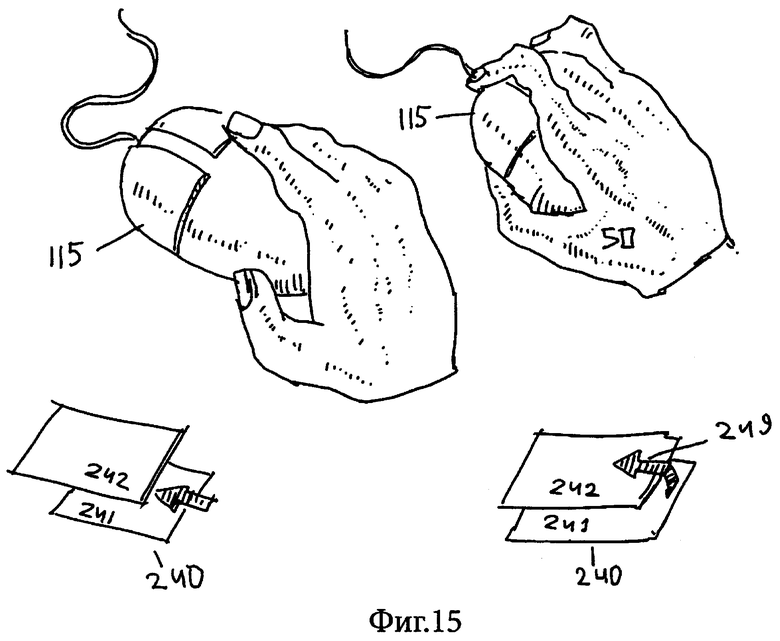
фиг.15 - датчики положения руки, расположенные на мыши компьютера, согласно изобретению;
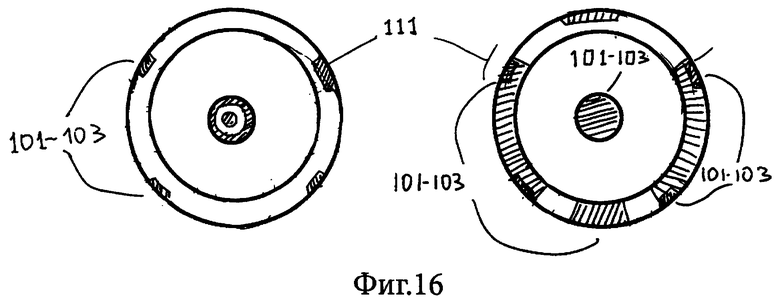
фиг.16 - расположение датчиков на руле автомобиля, согласно изобретению;
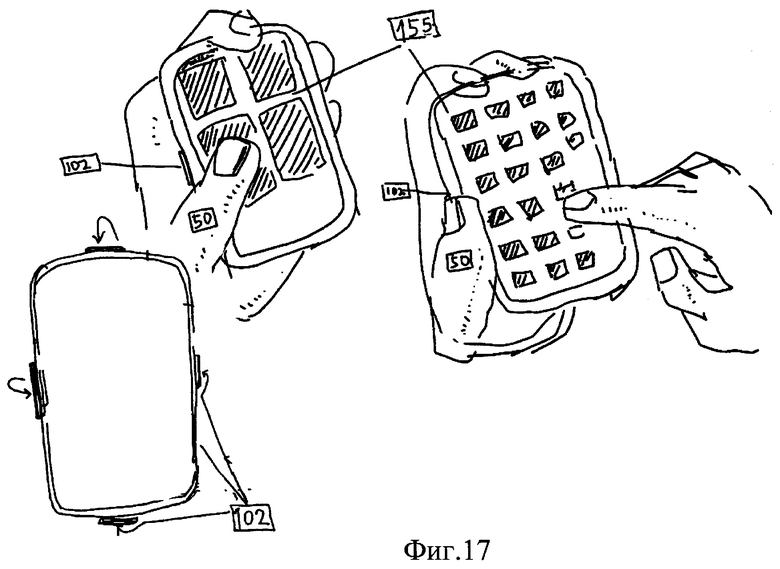
фиг.17 - размещение датчиков на корпусе портативного устройства, согласно изобретению;
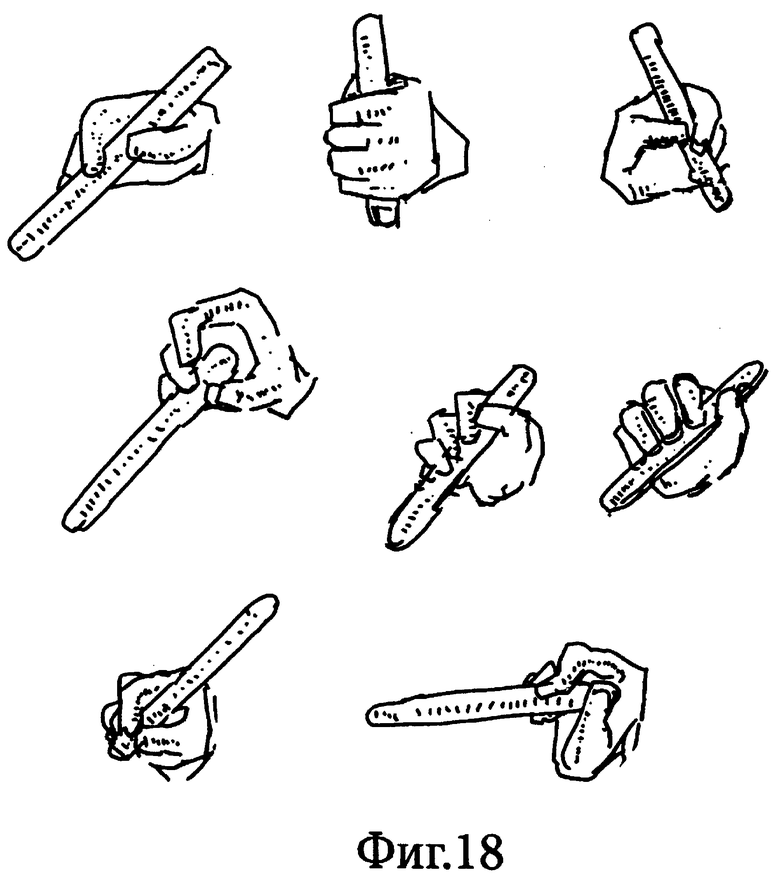
фиг.18 - возможные положения использования устройства в виде ручки, согласно изобретению;
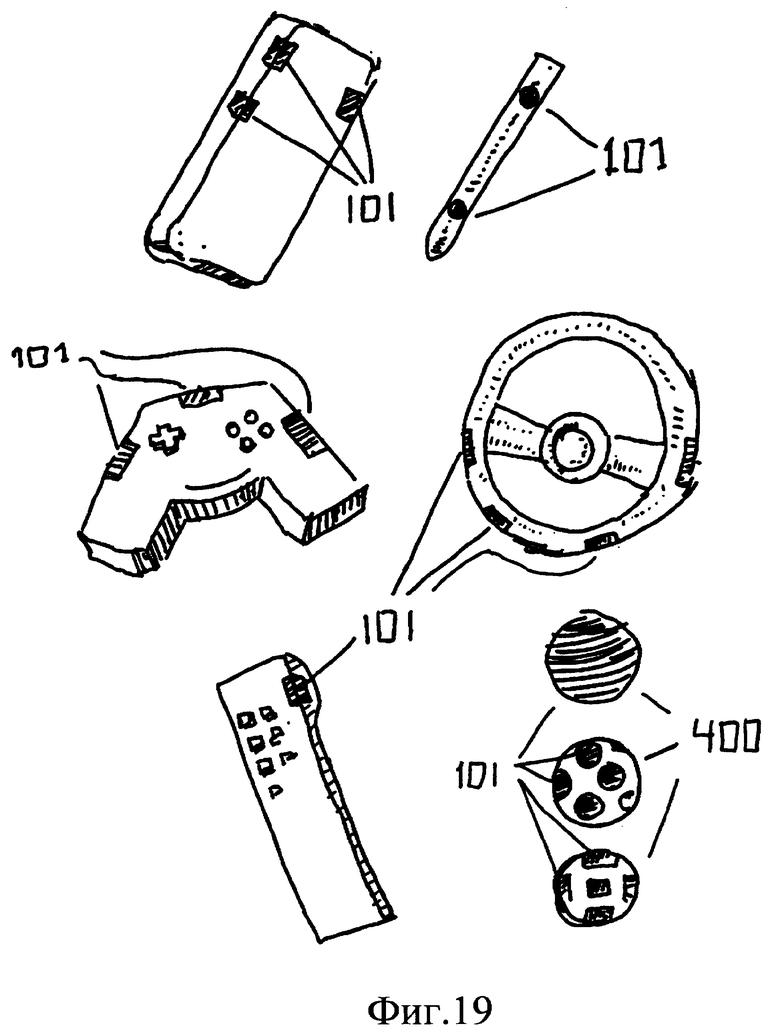
фиг.19 - варианты точечного размещения датчиков в тех местах, где это требуется, согласно изобретению;
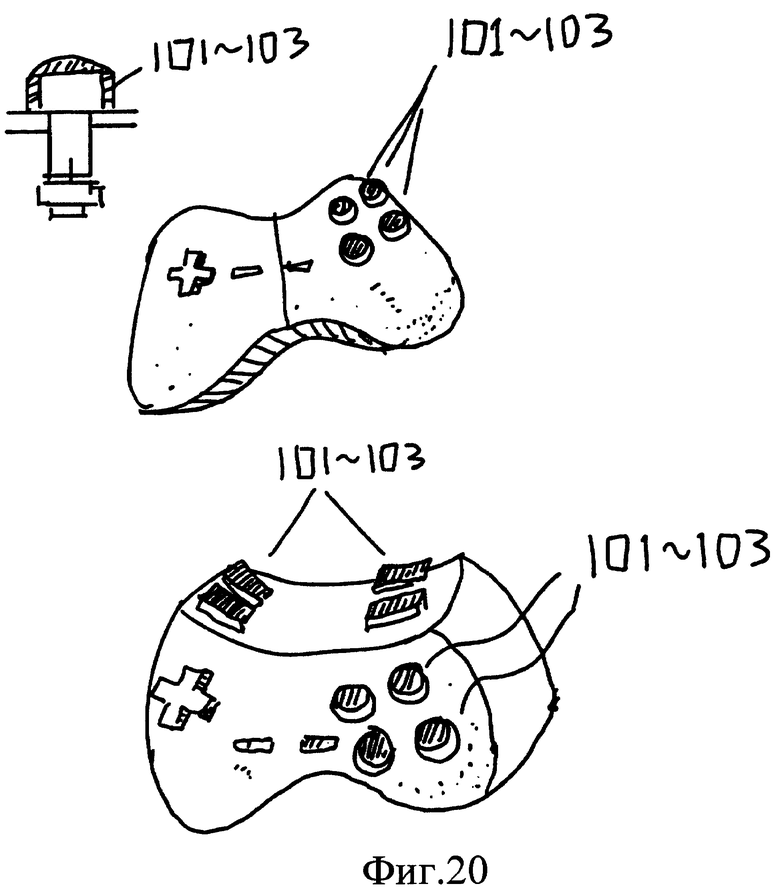
фиг.20 - использование датчиков на кнопках манипулятора, согласно изобретению;
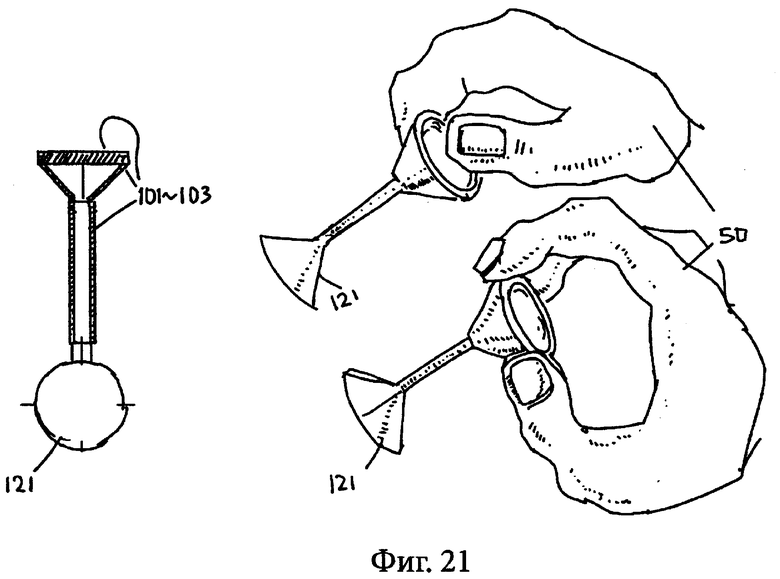
фиг.21 - использование отдельных частей манипулятора, снабженных дополнительными датчиками, согласно изобретению;
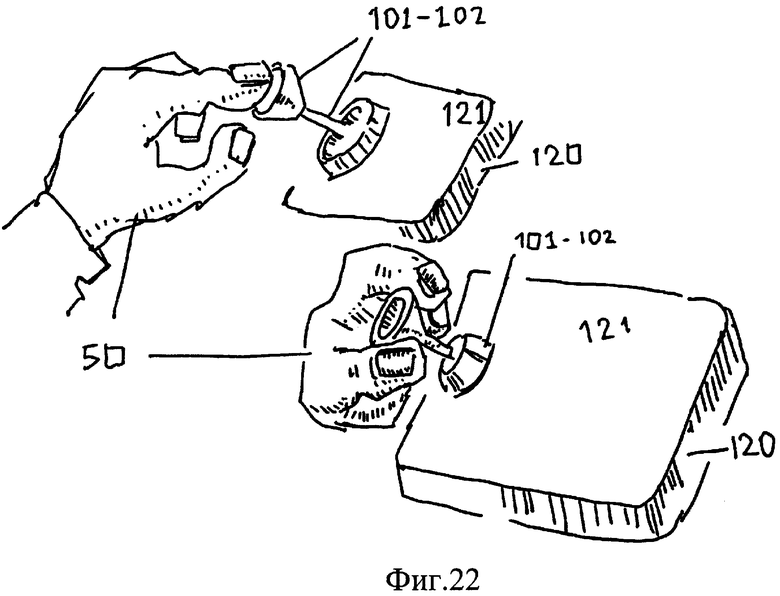
фиг.22 - возможные варианты использования частей манипулятора, согласно изобретению;
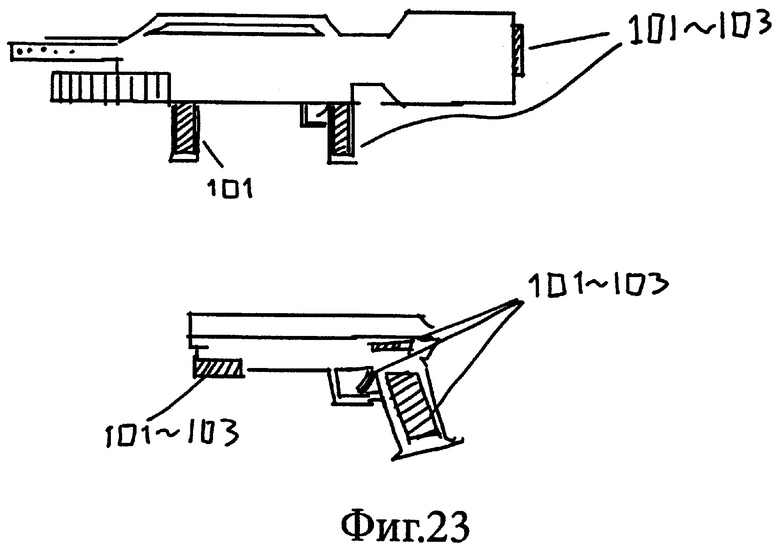
фиг.23 - возможное размещение датчиков на оружии для определения положения рук на нем, согласно изобретению;
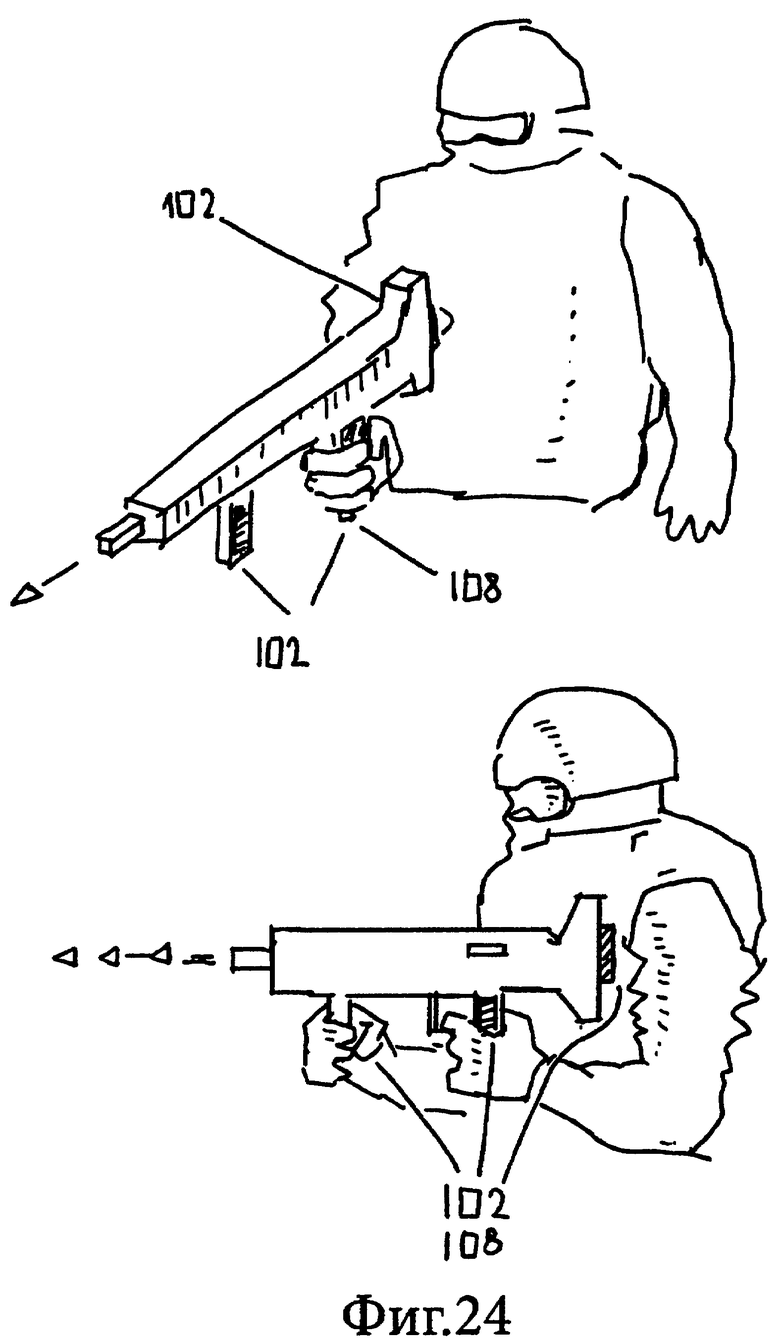
фиг.24 - датчики на оружии в действии, согласно изобретению;
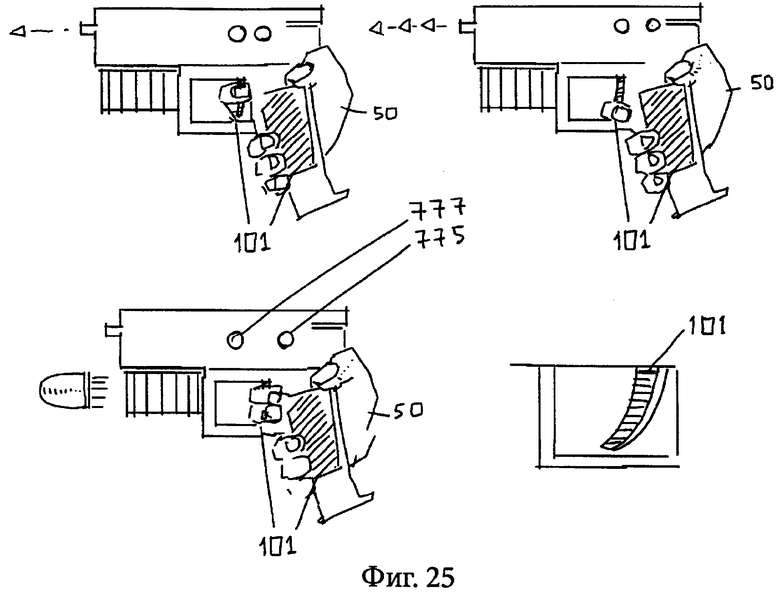
фиг.25 - использование оружия в зависимости от удерживания, согласно изобретению;
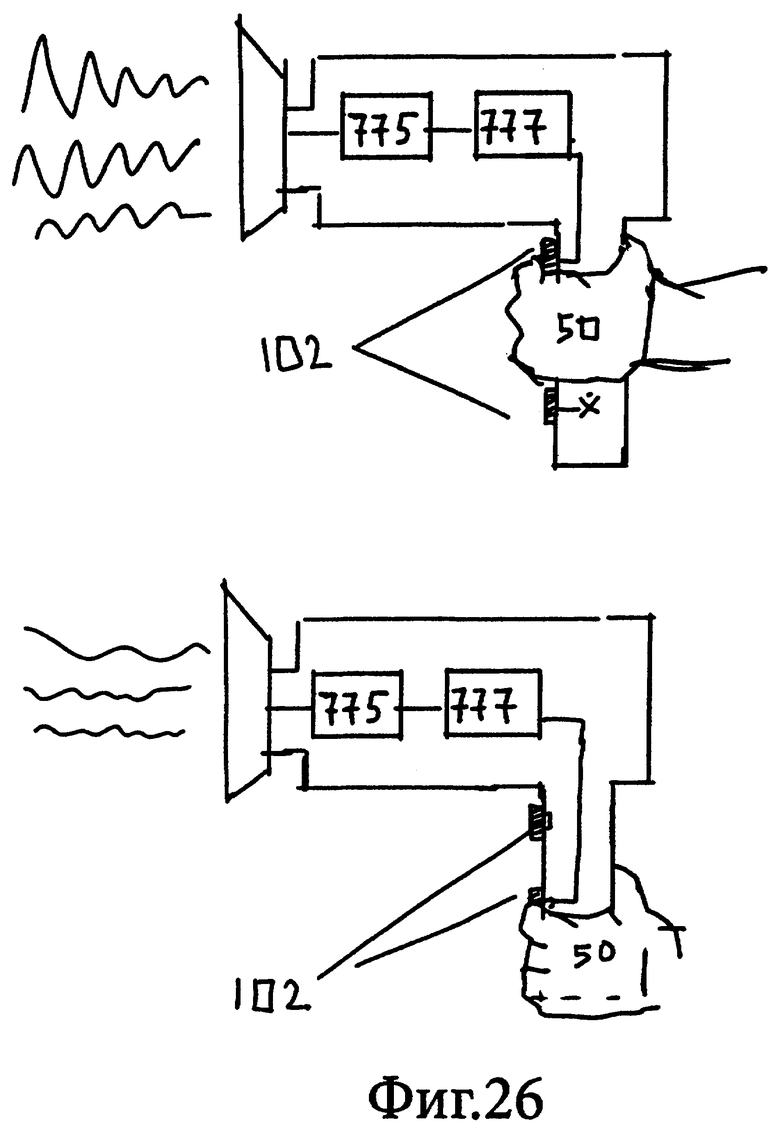
фиг.26 - использование системы в простом устройстве, согласно изобретению;
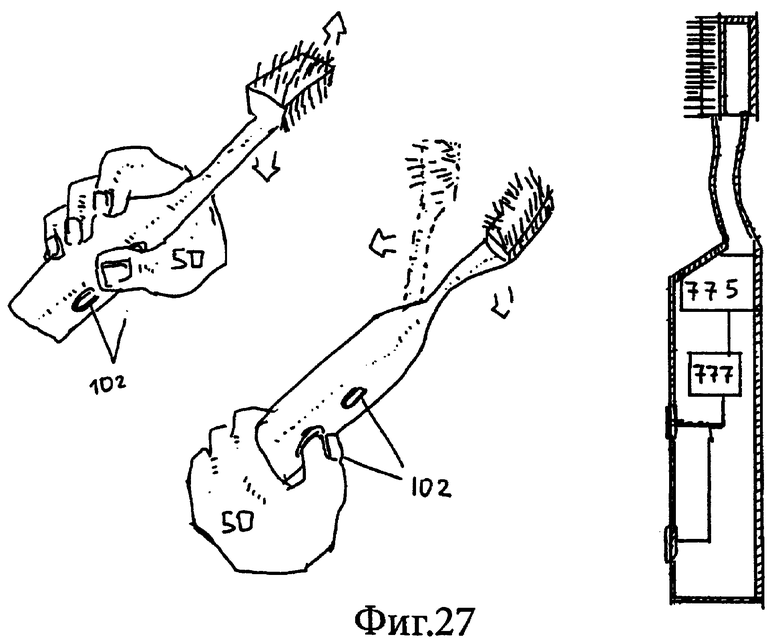
фиг.27 - использование системы в устройстве типа щетки, согласно изобретению;
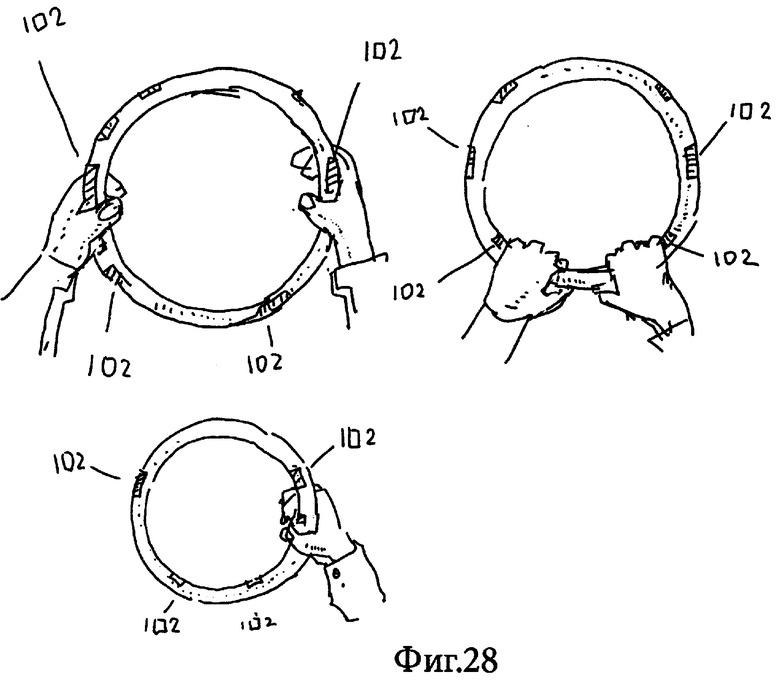
фиг.28 - использование руля с датчиками положения на нем, согласно изобретению;
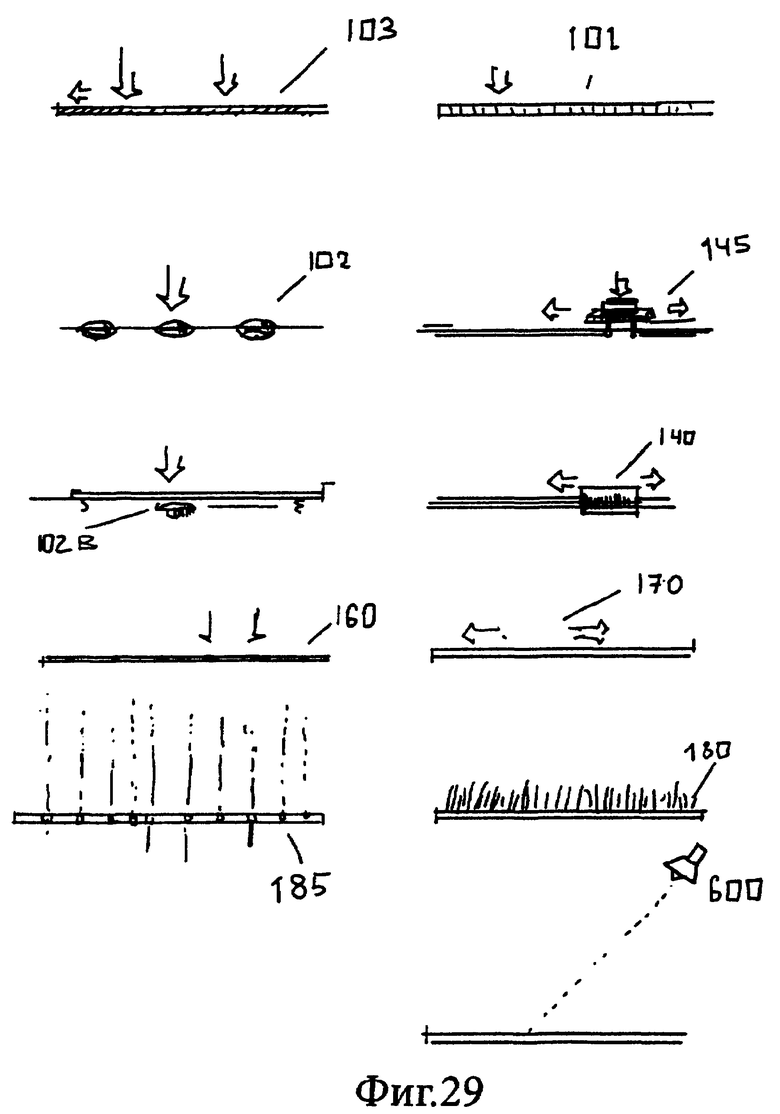
фиг.29 - разные типы датчиков для использования в системе, согласно изобретению;
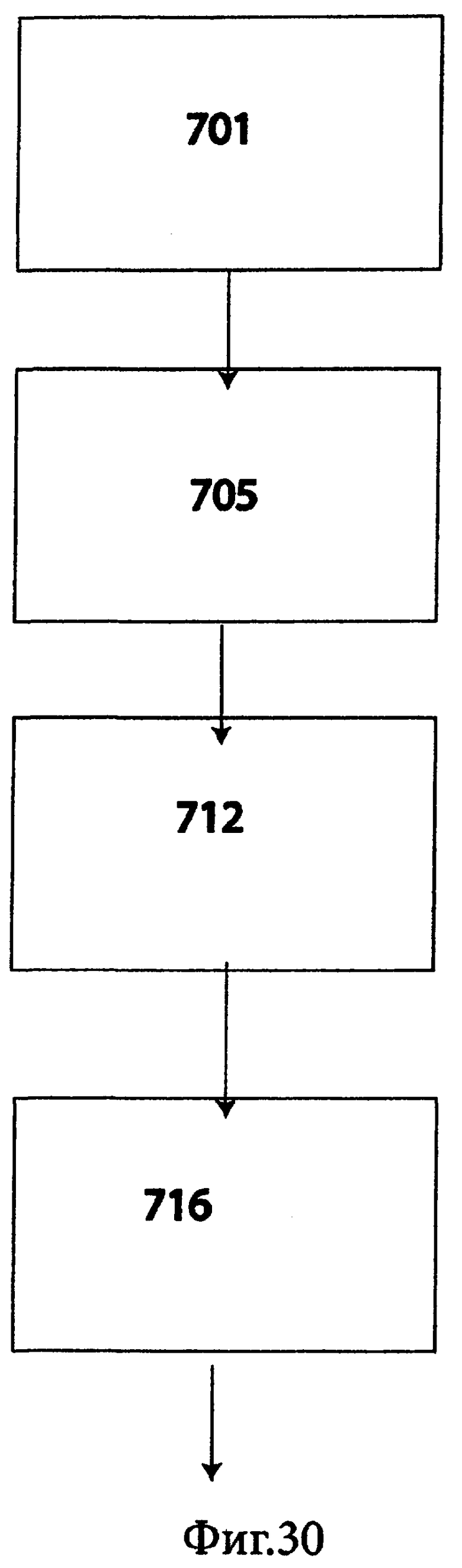
фиг.30 - последовательность операций для внедрения системы, согласно изобретению;
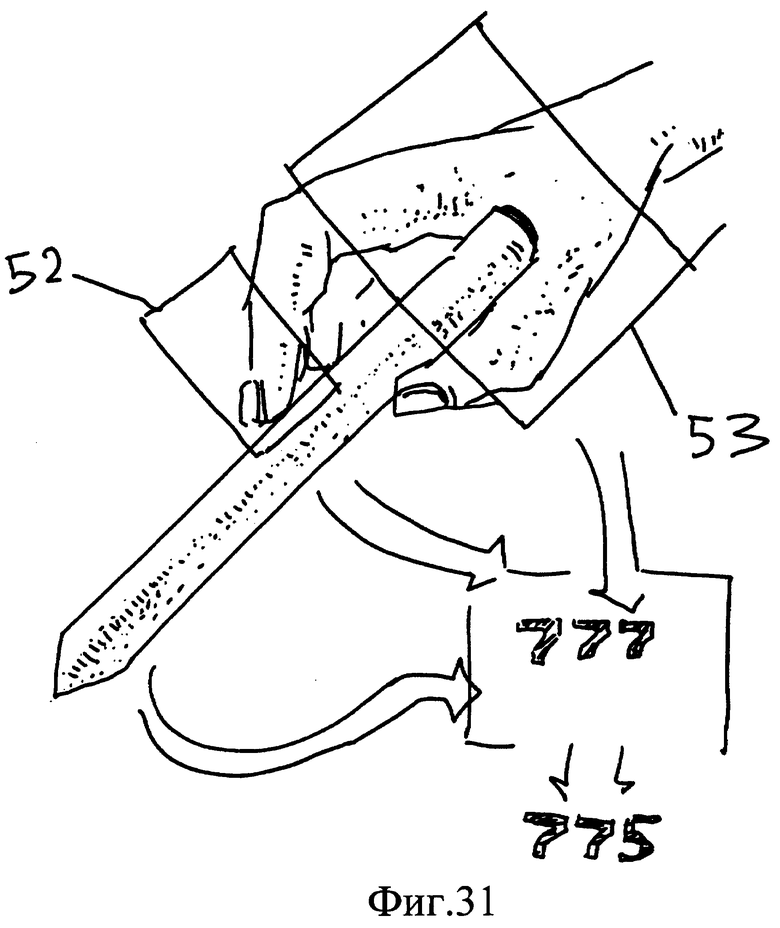
фиг.31 - пример активной и пассивной зон руки, согласно изобретению;
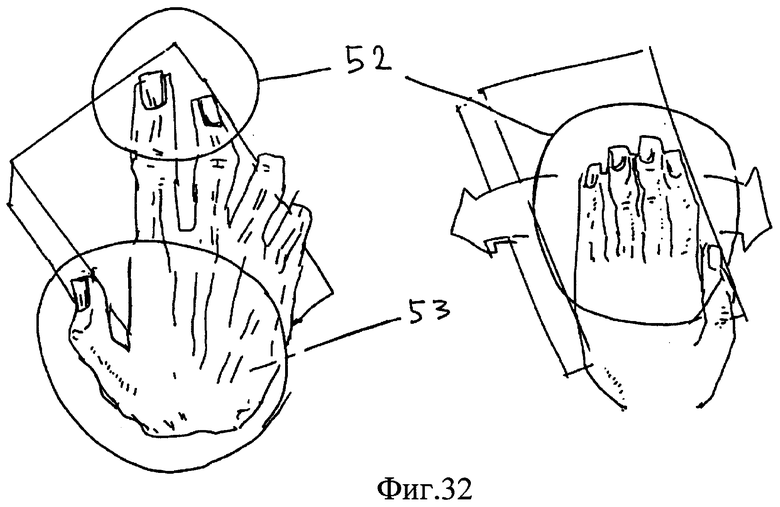
фиг.32 - пример работы активной и пассивной зон руки на плоском объекте, согласно изобретению;
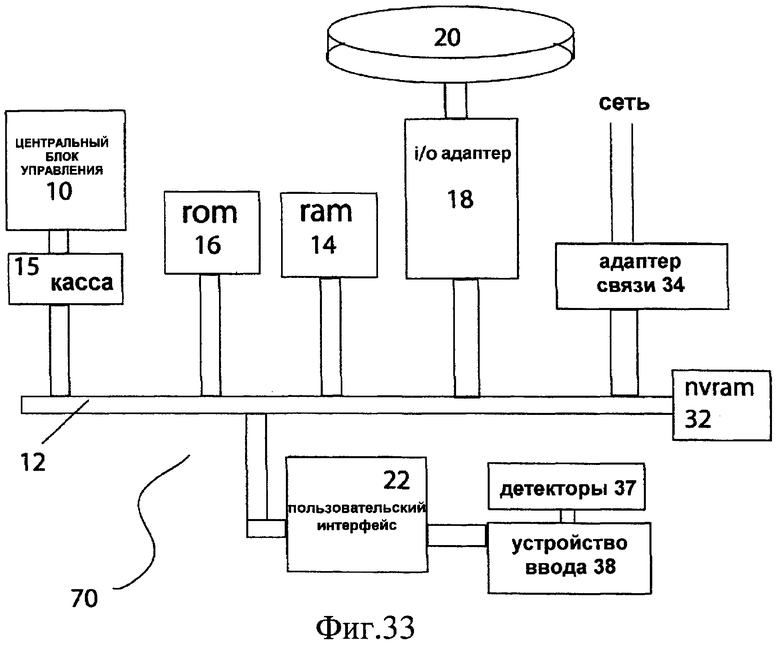
фиг.33 - компьютерная система, согласно изобретению;
фиг.34 - использование системы, согласно изобретению;
фиг.35 - блок-схема последовательности операций при работе системы, согласно изобретению;
фиг.36 - расположение меток на устройствах для облегчения работы, согласно изобретению;
фиг.37 - использование датчиков, распознающих объект на расстоянии, согласно изобретению;
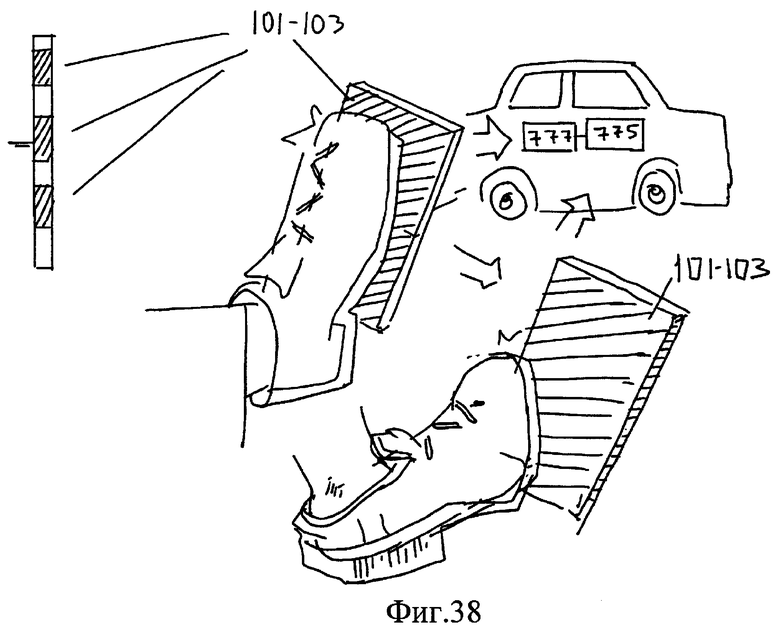
фиг.38 - использование ноги в автомашине, согласно изобретению;
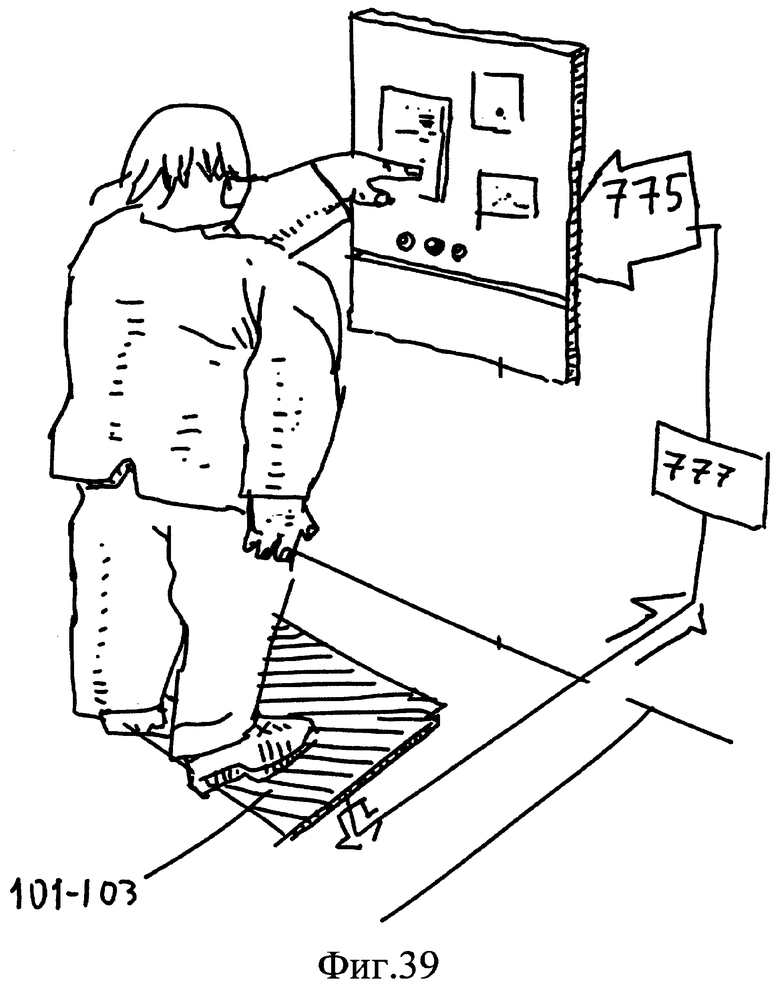
фиг.39 - использование ноги на датчиках в полу, согласно изобретению;
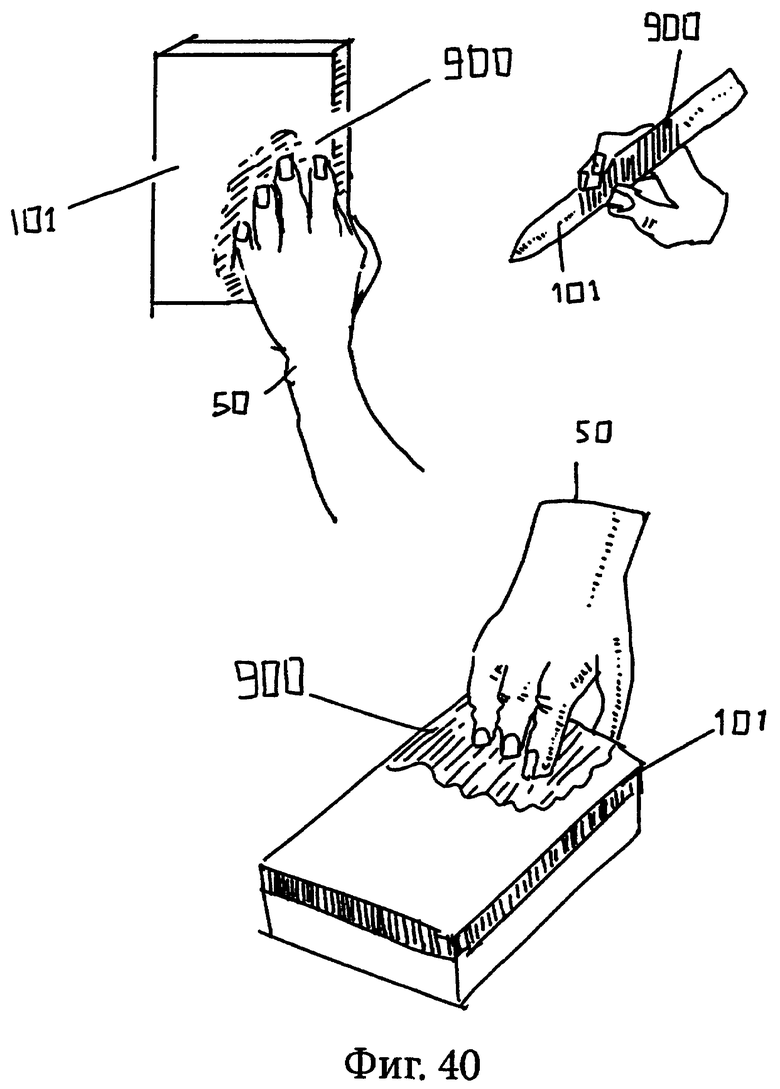
фиг.40 - определение положения руки на устройстве, согласно изобретению;
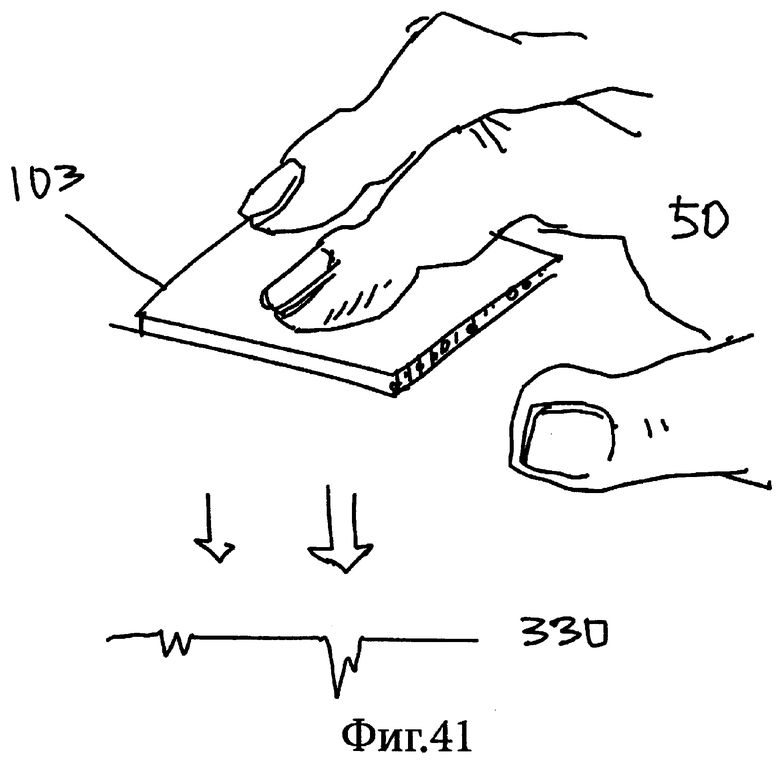
фиг.41 - использование полносенсорного покрытия, согласно изобретению;
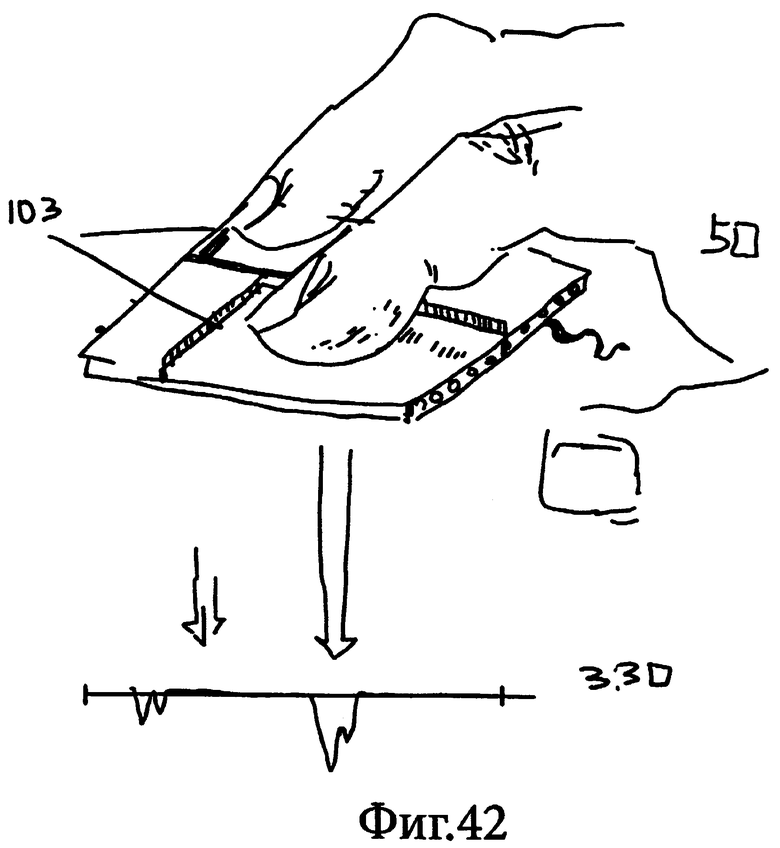
фиг.42 - использование частичного сенсорного покрытия корпуса устройства, согласно изобретению;
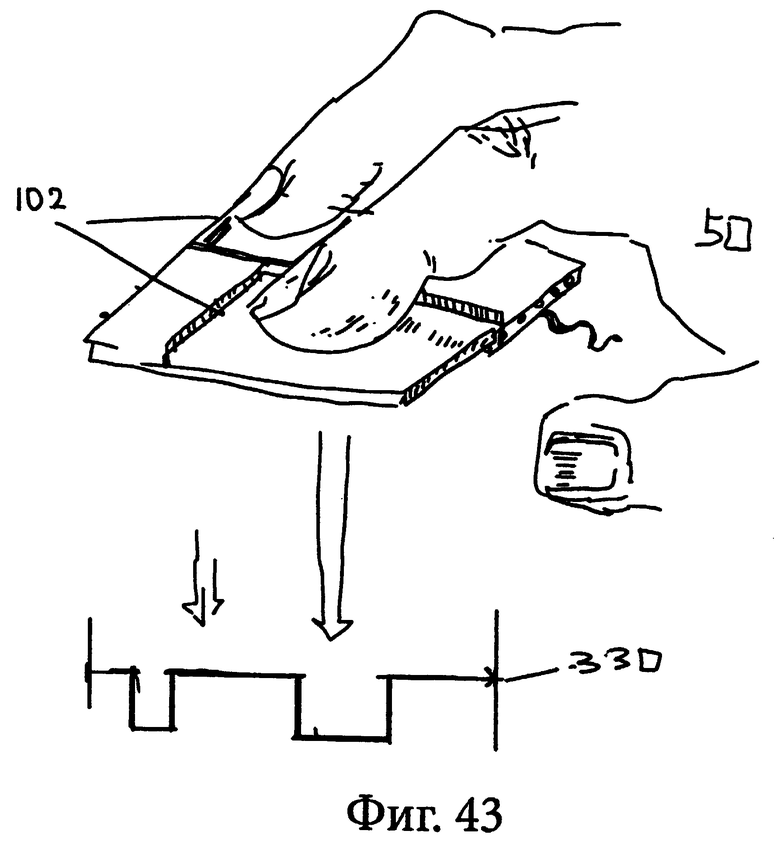
фиг.43 - использование простого триггера, согласно изобретению;
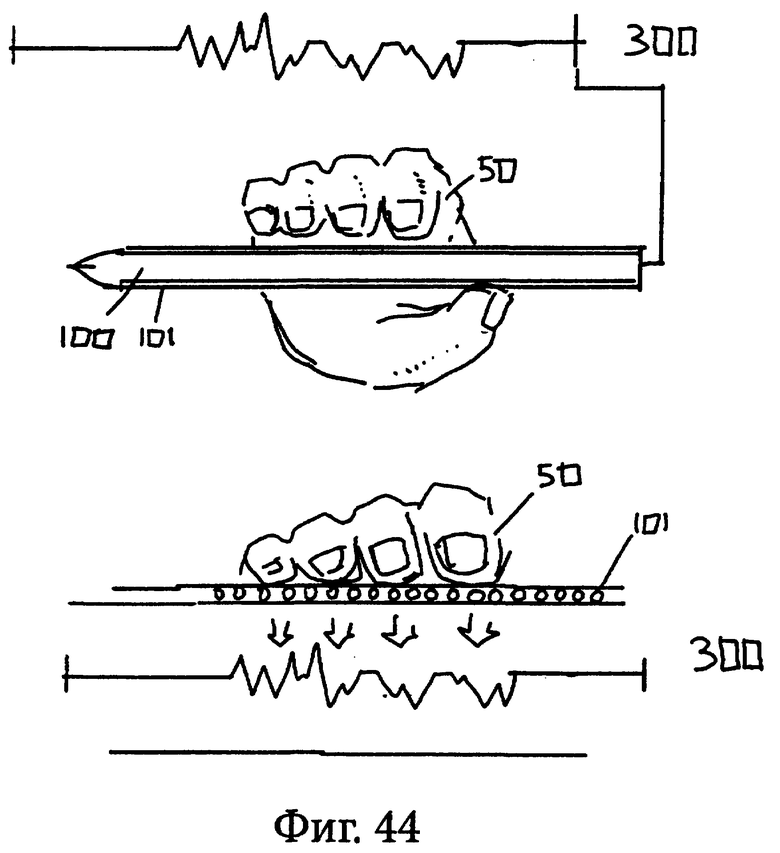
фиг.44 - сенсорное покрытие, реагирующее на давление, согласно изобретению;
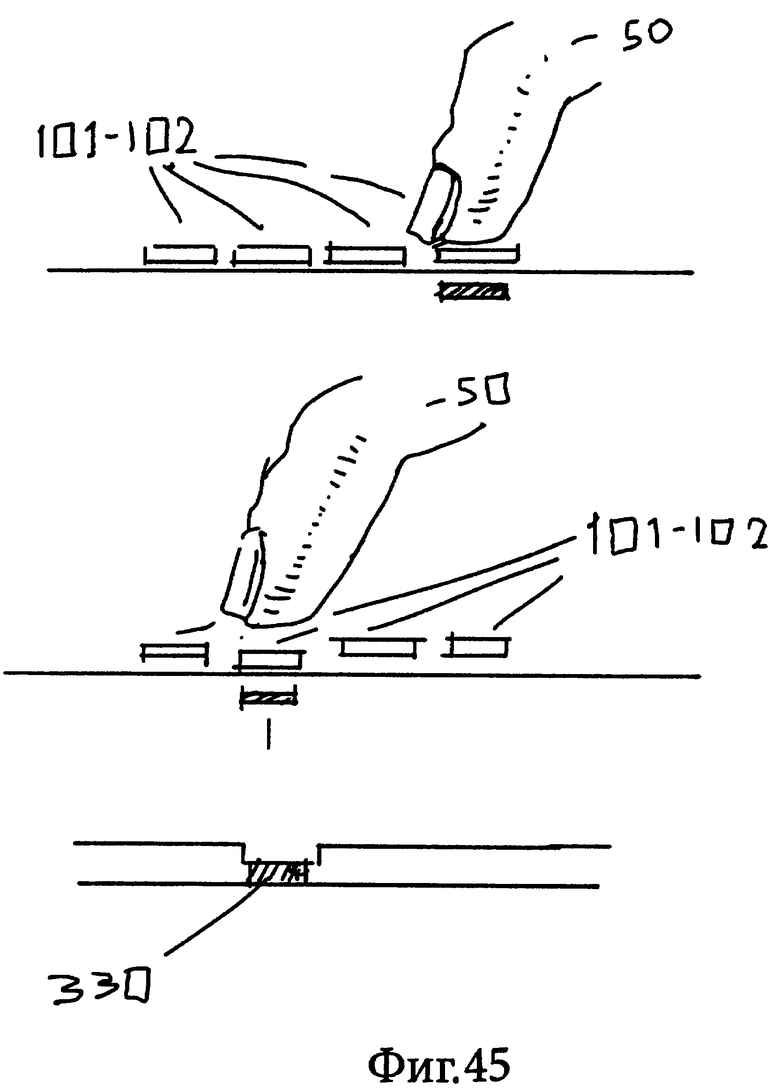
фиг.45 - распознавание сигналов с покрытия системой, согласно изобретению;
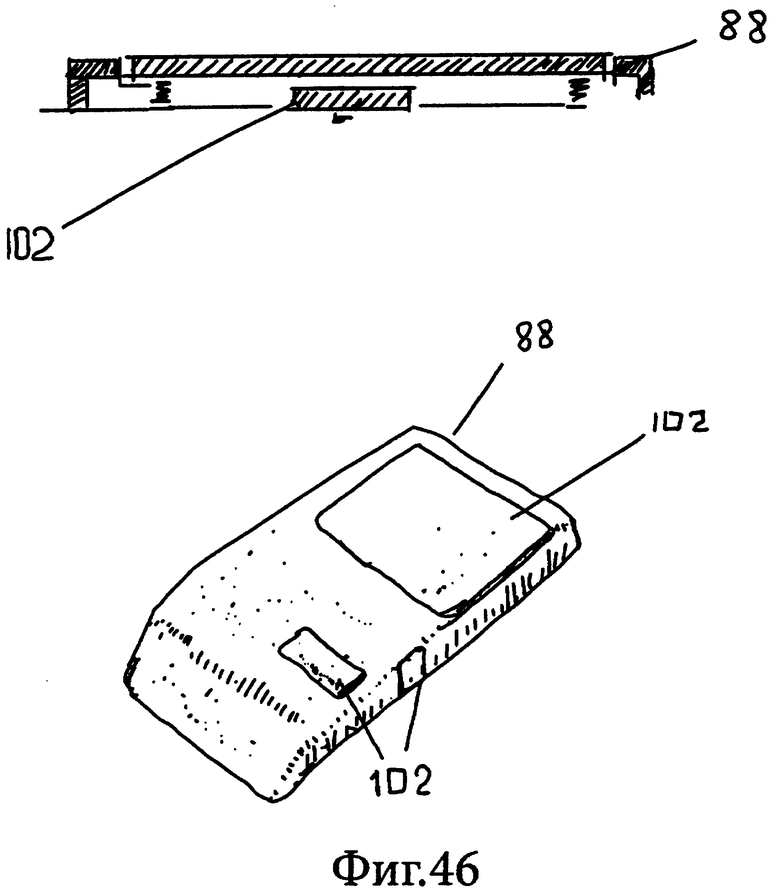
фиг.46 - скрытые триггеры, размещенные под поверхностью, согласно изобретению;
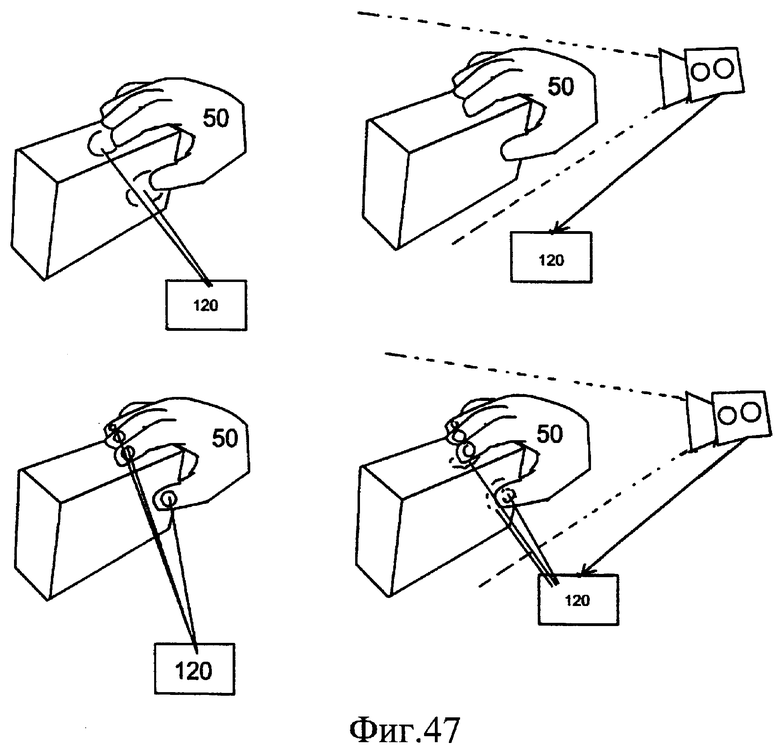
фиг.47 - варианты использования комбинированных датчиков одновременно, согласно изобретению.
ПОДРОБНОЕ ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Ниже подробно описаны варианты осуществления настоящего изобретения, примеры которых показаны на чертежах.
Задача системы создать новый вид управления через то, как пользователь удерживает манипулятор в руках, при этом можно производить сложные анализы положения руки, а также пользоваться более простым практичным и дешевым способом размещения простейших датчиков, т.е. триггеров, на поверхности корпуса манипулятора. При этом не нужен сложный анализ положения рук на устройстве, достаточно определить определенное количество датчиков, активированных пользователем, и связать с действием системы. Особенность заключается также в том, что для управления устройством используется поверхность устройства, не предназначенная для прямого ввода информации пользователем. Также система позволяет совершать какие-либо действия сразу, в зависимости от того, как пользователь взял в руку устройство. Система может быть использована в любых устройствах, где требуется управление пользователем.
В данном примере используется компьютерная система 70 фиг.33 с устройством ввода и датчиками для определения положения руки. Такая система может быть применена в настольных и портативных компьютерах, а также в игровых консолях.
Компьютерная система 70 содержит любой подходящий микропроцессор и любое количество других объектов, соединенных системной шиной. В описываемом варианте компьютерная система 70 содержит память, такую как только для чтения ROM 16, оперативную память RAM 14 и периферийные устройства хранения памяти 20 в виде жесткого диска, флэш-памяти и т.п., соединенные системной шиной 12 через I/O адаптер 18, компьютерная система 70 содержит также устройство 38 ввода в компьютер, такое как клавиатура, мышь, цифровая ручка, соединенное через пользовательский интерфейс 22 с системной шиной. Устройство ввода содержит датчики 1 на своей поверхности для определения положения объектов на корпусе устройства ввода, связанные также с системной шиной 12 через пользовательский интерфейс 22.
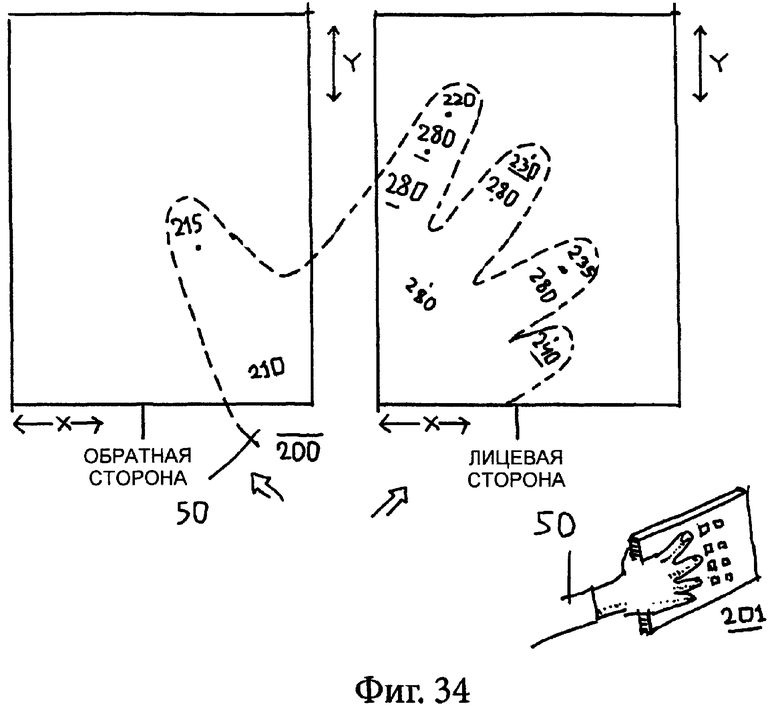
Специалисту в данной области ясно, каким образом могут работать датчики, тип датчиков для определения положения руки на устройстве. В описании далее указаны типы датчиков и способы их размещения для определения положения руки. Основной принцип работы датчиков определения положения точек пользователя по отношению к устройству - датчики и система должны определять положения точек пользователя по отношению к устройству, на котором находятся руки пользователя, чтобы правильно отслеживать перемещение руки по устройству. На фиг.34 показан пример положения руки 50 на устройстве 201 типа простого пульта с поверхностью с обеих сторон, способного отслеживать положение руки по нему. Позиция 200 обозначает обе стороны устройства с сенсорным покрытием наподобие тачпада, способного отслеживать объекты на нем. Сенсорное покрытие - это для максимального отслеживания перемещения по всему корпусу объекта, оно может быть заменено любыми датчиками, такими как обычные кнопки. Датчики разных типов могут быть использованы для отслеживания перемещения по поверхности корпуса. Датчики могут располагаться не по всему периметру, а только в тех местах, где нужно получить информацию о местоположениях объектов. В данном случае - это положение руки 50 на устройстве. Поверхность имеет точки координат расположения каждой чувствительной части датчика для определения положения сигналов от датчика по отношению к корпусу устройства, на котором находится покрытие с датчиками. Датчики могут определять точки соприкосновения с поверхностью отдельных точек пользователя. В зависимости от поставленных задач может происходить как примерное определение положения руки на устройстве по количеству концентрации точек соприкосновения руки пользователя с поверхностью манипулятора, так и сложное определение с использованием вычислений операционной системы. Система может сравнивать расстояние между точками касания для определения типа объекта, типа руки, положения руки на устройстве. С использованием средств анализа карты, полученной с датчиков на руке на поверхности 200, операционная система пытается идентифицировать поверхность вокруг точек касания руки, сравнивая точки 215, 220, 230, 235, 240, 280, 210, для определения положения руки, как между собой, так и по отношению к устройству, и определяя, какая точка в каком месте контактирует с корпусом. Система определяет тип объекта, расположенного на поверхности манипулятора, для загрузки данных об управлении с ним, например, это может быть правая или левая рука или наконечник другого манипулятора на поверхности, например ручка. Специалист в данной области сможет расставить датчики в нужной последованности на корпусе устройства ввода и анализировать данные для получения нужной карты расположения руки или другого объекта при использовании. Система может распознавать части руки 215, 220, 230, 235, 240, 280, 210 по отдельности, причем как по заранее заложенным данным, так и в процессе использования, корректируя и составляя более точную карту пользователя. Данные могут сохраняться в системе на жестком диске 20 и загружаться при последующей загрузке данных, которые могут загружаться для последующей идентификации пользователя на поверхности устройства ввода теми же датчиками. На фиг.2, фиг.3, фиг.4, фиг.7, фиг.8, фиг.11, фиг.12, фиг.14, фиг.15, фиг.22, фиг.24, фиг.26, фиг.27 показаны возможные варианты использования устройства. Датчики используются в качестве полного контроля устройством при минимальных действиях простого типа, где положение руки привязано к датчику включения и работы устройства, и даже, в некоторых случаях, не требуется компьютерной системы. Более продвинутые датчики реагируют на примерное положение руки на устройстве для выполнения функций или перевод устройства в определенный режим работы, например, ручка-манипулятор, которая, если взять ближе к концу, начинает производить двойные клики. Еще более продвинутые датчики позволяют отслеживать определенные положения руки, а затем переключать работу датчиков на обычный активный режим в зависимости от положения руки. И последний вариант, когда система разделяет, как показано на фиг.34, на части, присваивая им как активные зоны пальцев 220, 230, 235, 240, 215, которые при контакте могут воздействовать обычным активным способом по их перемещению, так и пассивные части руки 280, расположение которых используется для дополнительных установок типа работы устройства. Например, можно управлять без дополнительных датчиков курсором, перемещая пальцы по корпусу. При этом, в зависимости от того, где находится центральная пассивная часть руки, будет определяться открытое приложение программы или будет выполняться режим активного управления.
При этом анализ и управление точно также могут производиться и распознаваться с помощью других конечностей или предметов, например, ноги или дополнительного манипулятора на поверхности, такого как стилус. Очень многое зависит от датчиков. Любые датчики можно приспособить для работы с системой, например, датчики давления дополнительно могут передавать информацию о давлении объекта, которая может быть использована как для создания более точной карты руки, так и просто для управления устройством пассивным образом и активным образом. Если на устройстве разместить оптические датчики, то система сможет точно также отслеживать нахождение и перемещение объекта еще до соприкосновения с устройством. Как вариант, датчики могут быть размещены не на самой поверхности, а на руках пользователя, например, в перчатках или закреплены на концах пальцев, передавая сигнал о своем местоположении, или размещены в виде фото-видео или лазерных устройств отслеживания вне устройства и пользователя.
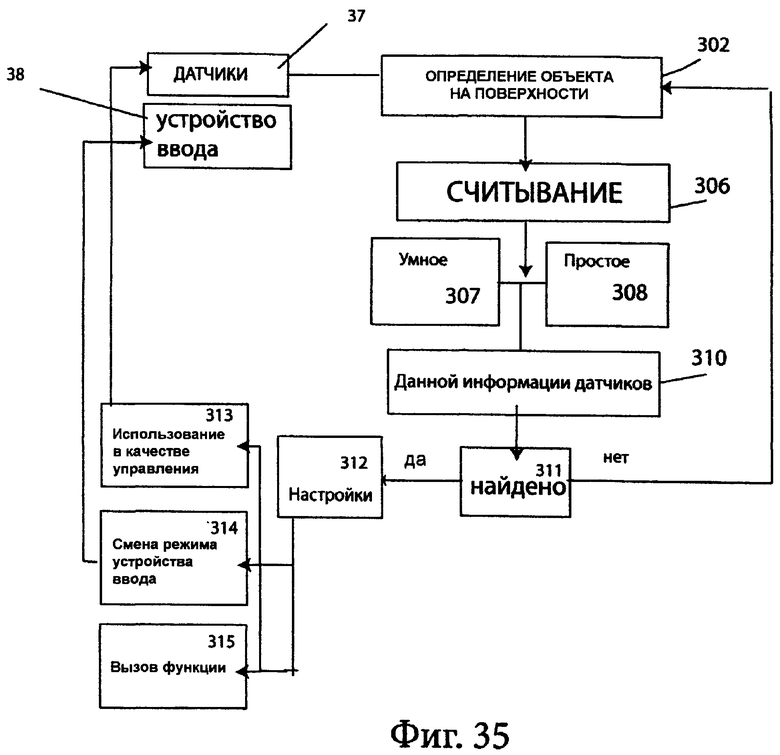
На фиг.35 показана блок-схема алгоритма работы системы. Устройство 38 ввода содержит детекторы 37, способные улавливать любой сигнал о положении руки объекта на поверхности в зависимости от типа, давления, звука, тепла и т.п. При определении сигнала 302 датчики передают его системе для считывания. Далее в зависимости от того, как система настроена, она может производить сложный анализ данных от датчиков 307 с распознаванием положения руки, или отдельных частей руки, и простой анализ по показаниям 308 активированных точек на датчиках для сравнения их напрямую. Далее производится поиск запрограммированных действий на полученную информацию 310. Определяются как простые параметры использования, так и заданные действия на подобную информацию с датчиков. Поскольку данные о положении руки на устройстве неточные и зависят от множества параметров, то производится поиск с возможным допуском искажений. В зависимости от настроек он может варьироваться и даже, если информация совершенно не поддается распознаванию, может быть использована наиболее близкая к этому по похожести комбинация пальцев на руке. Как вариант, происходит продолжение мониторинга данных, пока данные не совпадут должным образом. Когда данные распознаны в блоке 311, реализуются варианты использования информации с датчиков о нахождении объекта на устройстве ввода, указанной в настройках блока 311. Положение руки может использоваться для управления в зависимости от задачи системы и от самого положения руки, а также одновременно используя активный и пассивный режимы работы.
Блок 314 переключает активный режим работы устройства ввода, на котором закреплены датчики 37 для определения положения руки на нем. Режим определения режима работы показан на чертежах. Режим работы можно показать на примере использования цифровой ручки пера (фиг.11), которая изменяет поведение в зависимости от того, как пользователь удерживает устройство. Это может быть как просто смена функции, производимая активной частью управления, например, переключение в режим двойного клика, так и изменение размера инструмента при рисовании в графических программах. Блок 315 осуществляет запуск определенной заданной функции. Это может быть как управление простейшим устройством (фиг.27), например зубной щеткой, которая включается и работает в определенном режиме в зависимости от того, как ее взяли в руку. Это также может быть запуск определенной программы или операционной системы для работы с устройством. Датчики 313 (фиг.35), предназначенные для пассивного определения положения руки, переключаются в режим активной работы (фиг.5). Это может происходить как при запуске приложения, так и при взятии инструмента определенным образом. Еще один вариант - нечто общее с 315, 314, 313, это использование одних и тех же датчиков для активного и пассивного управлений. Зона руки делится на активную и пассивную части объекта руки. Это может происходить как заранее, так и в процессе использования, распознавая активную часть руки. Активная часть, такая как пальцы или один палец, используется для активного использования традиционным образом для передвижения курсора, а неактивное положение руки на корпусе используется для пассивного ввода информации.
За назначение функций определенному положению руки отвечает операционная система или данные, зашитые в микропроцессор. В случае операционной системы пользователь сам может указывать и конфигурировать систему, т.е. как реагировать на перемещение как активной части конечности, так и неактивной. Точно так же можно производить настройку любых устройств, подключенных к компьютеру при наличии возможностей операционной системы. Данные о личных настройках сохраняются и могут быть автоматически загружены при определении руки пользователя в следующий раз по карте, составленной системой, или при ручном выборе пользователя в системе.
Разделение руки на активные и менее активные области может производиться в интерактивном режиме распознавания. Достигается это путем того, что система постоянно анализирует поверхность датчиков, отслеживая все точки перемещения на ней. В случае, если на определенное время область перестала значительно передвигаться, то ей может быть присвоено пассивное назначение с присвоением функций; точно так же и с активной частью. Это грубый метод, более проще, когда система примерно располагает информацией о размерах конечностей, например, система заранее знает примерную площадь руки и частей пальцев, это гораздо проще позволяет различать активные и менее активные области. Также разделение может вестись по положению руки на устройстве. Система знает заранее положение руки, как по отношению к устройству, так и просто изгиб, определенным образом обеспечивает активность и неактивность зон на руке. Другой самый простой способ определения активных и неактивных частей - это по концентрации давления или других данных датчиков. Обычно, когда пользователь удерживает в руке предмет, то давление сосредотачивается ближе к концу пальцев, система определяет положение по концентрации точек и давления.
Система в подобном виде может работать в любых устройствах. Она может быть исполнена даже в механическом виде по подобному принципу. Управление и идентификация могут происходить рукой, ногой, головой, обеими руками и ногами как вместе, так и по отдельности. Система может определять также при необходимости разные стороны руки и наклон конечности пользователя, также сила удерживания корпуса может использоваться в управлении как в совокупности, так и как отдельная величина.
На фиг.30 показана блок-схема операций при изготовлении устройства по данной технологии. Для начала на шаге 701 определяется тип устройства, который будет использоваться в качестве носителя или модернизации для новой технологии, или, наоборот, устройство для реализации технологии. Далее на шаге 705 определяются задачи, которые нужно будет выполнять при использовании устройства, например, управление трехмерной программой или просто переключения режимов работы тестера. Когда это ясно, выбираются типы датчиков, которые будут использоваться в устройстве. Это зависит от разных параметров, например, каким образом устройство будет использовано, а также, например, от размера бюджета на создание устройства управления. Далее на шаге 712 выполняется размещение датчиков на поверхности устройства. Датчики могут покрывать всю поверхность. При этом датчик может быть как один, по типу сенсорного покрытия, или как множество простых датчиков, но и охватывать только определенную площадь устройства, где необходимо определять положение пользователя. Датчики сверяются с конструкцией устройства, чтобы более эффективно их разместить, например, разместить скрытно под поверхностью или сделать их определенного размера. Датчики могут находиться на других датчиках, представляя собой целые слои на поверхности устройства. Далее на шаге 716 производится программирование датчиков и компьютерного приложения, которое будет с ним работать. Датчики могут быть запрограммированы как на полный анализ руки при охвате устройства и детальным отслеживанием, так и частичным примерным, основываясь на примерных сигналах датчиков с поверхности устройства. Также программируется поведение устройства, или используется программа, на сигналы датчиков. Возможности управления с помощью положения руки на устройстве огромны. Можно отслеживать как простое удерживание устройства рукой, привязывая к этому любые действия и функции; можно производить сложные расчеты, анализируя и отслеживая положения каждого пальца; а также можно измерять силу давления, цвет, температуру, скорость перемещения, расстояния до руки и все, что способны определить датчики.
Возможны дополнительные действия в системе, такие как определение типа объекта на поверхности, загрузка настроек для данного типа конечности на устройстве или настроек пользователя.
Система способна сама обучаться и калиброваться при работе с пользователем в случае необходимости. Для хранения настроек системе нужна память для сохранения данных, например, оперативная память 14 (фиг.33) и долговременная память 20. При этом память может быть обновляемой и заранее зашитой предустановками на определенные действия с определенным объектом. В случае необходимости настройки могут сохраняться и загружаться в зависимости от идентифицированного объекта.
Идентификация может происходить по карте конечностей, составленной заранее, при этом идентификация может включать параметры при продолжительном использовании устройства, постепенно сверяя данные по мере использования. Возможен вариант идентификации для открытия доступа, когда предмет нужно взять в руку определенным образом. Это работает очень просто, дополнительно в систему включаются шаги: определение примерного положения объекта в данный момент и перепроверка данных при следующем входе в систему. При этом идентификация по положению конечности на устройстве может быть использована скрытно как для пользователя, так и для окружающих.
Система способна работать не только с объектами на манипуляторе, распознавая, определяя, отслеживая их, система может использовать для анализа положение ног на поверхности пола при установленных датчиках в нужных местах. Дополнительное управление может производиться по положению пользователя на земле, направлению ног и других параметров. Система имеет датчики, связанные с информацией, где они расположены и какую область нужно контролировать. При поступлении сигналов с датчиков происходит отслеживание объекта на поверхности, положение которого используется как величина, к которой могут быть привязаны действия.
Управление положением объекта на поверхности устройства управления может выполняться не только по заложенной ранее программе, но устанавливаться пользователем самостоятельно, для привязки определенных положений при использовании устройства к запрограммированным действиям.
Датчики, используемые для определения положения, могут быть использованы для других целей, как обычные манипуляторы, размещенные на корпусе. Ими можно управлять, изменив положение руки или постукивая по ним. К постукиваниям можно также привязать определенные действия.
Для идентификации или управления может быть использована карта объекта, как отдельной конечности, такой как рука, так и отдельных ее участков, не просто пальцев, а давления, производимого на разные точки на поверхности. По данным датчиков по возможности может создаваться максимально обширная и точная карта для распознавания действий пользователя. Это может быть точный размер, вес, давление, оказываемое при работе, цвет, температура, скорость передвижения, расстояние до устройства. Создание карты может осуществляться в автоматическом режиме по мере работы с устройством и в специальном режиме калибрации.
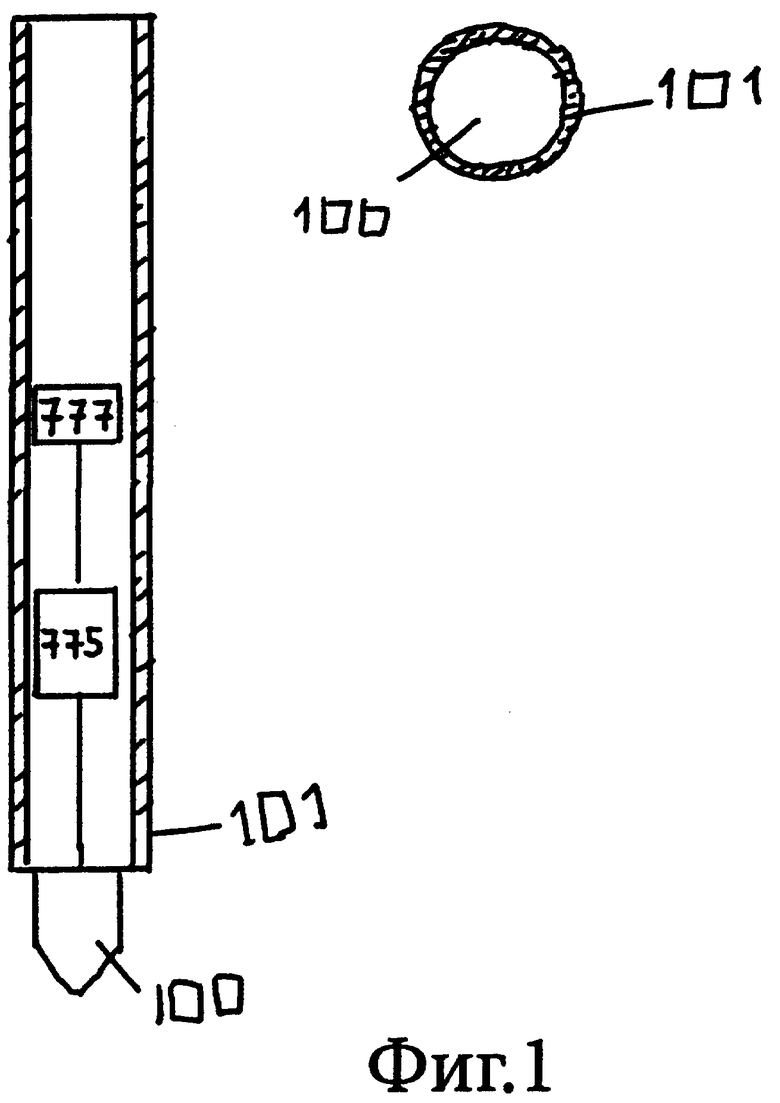
На фиг.1 показано устройство ввода в виде компьютерной ручки 100 и покрытие 101, покрывающие манипулятор, способное улавливать положение руки 50 пользователя в том месте, где это требуется. Внутри может находиться любое устройство для использования с системой пассивного управления, но также может быть и просто пустышка, используя сенсорное покрытие для управления.
Если это компьютерный манипулятор, то данные о состоянии датчиков, управляющих пассивно, передаются так же, как и работают остальные элементы манипулятора, например кнопки. Операционная система распознает сигналы с датчиков и использует их в зависимости от настроек.
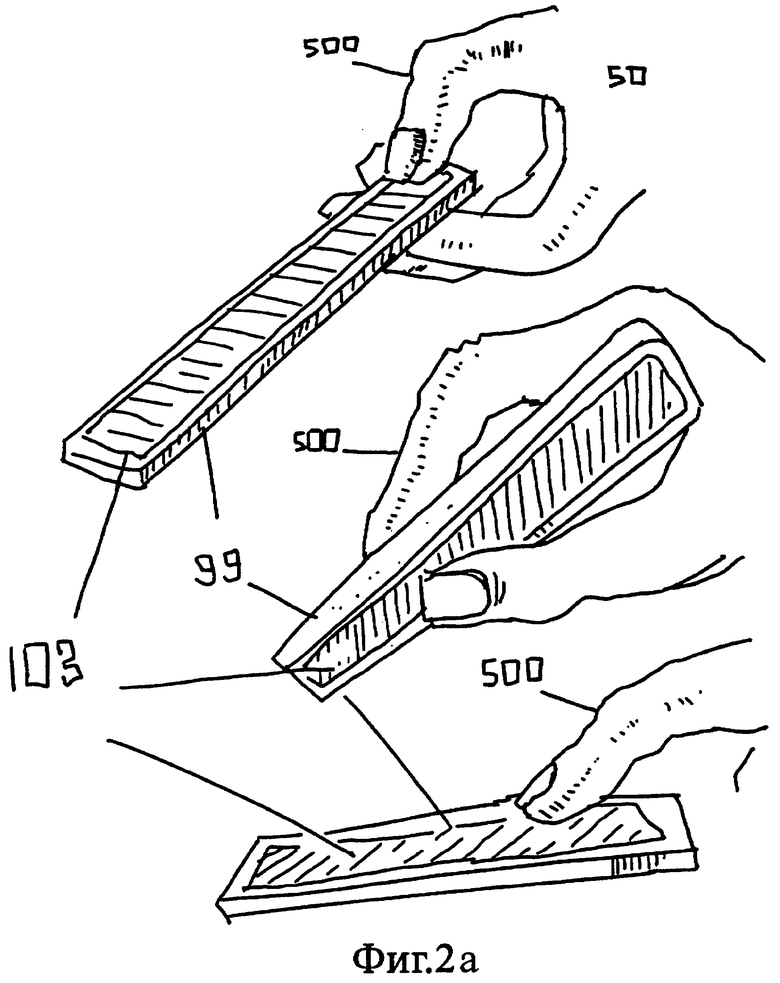
На фиг.2а показано устройство ввода в виде ручки 99 в плоской форме для более простого и дешевого размещения на нем сенсорного покрытия 103. В таком варианте выполнения покрытие может быть тачпадом, расположенным с обеих сторон устройства, способным отслеживать местонахождение руки 50, а также использоваться вспомогательно для управления перемещением пальцев. Также показано возможное положение пальца 500 и действия рукой, которые возможно определить с помощью сенсорного покрытия 103.
Сенсорное покрытие может улавливать передвижение, расположение руки пользователя на устройстве и давление, и дополнительные функции, такие как температура, при необходимости. Все зависит от типа покрытия и датчиков, а также функций компьютерной системы.
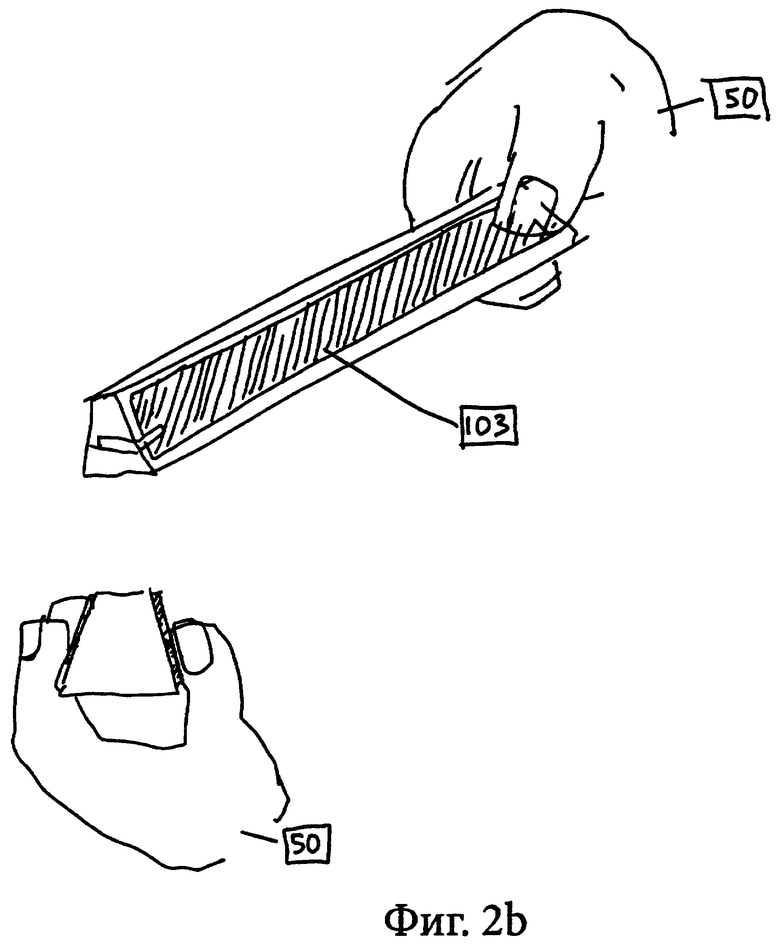
На фиг.2b показан вариант сенсорного покрытия 103 на устройстве в треугольной форме для компромисса между стоимостью изготовления устройства и удобством расположения рук 50 на нем. Трехгераневый корпус ручки дает информацию о расположении рук пользователя с трех сторон.
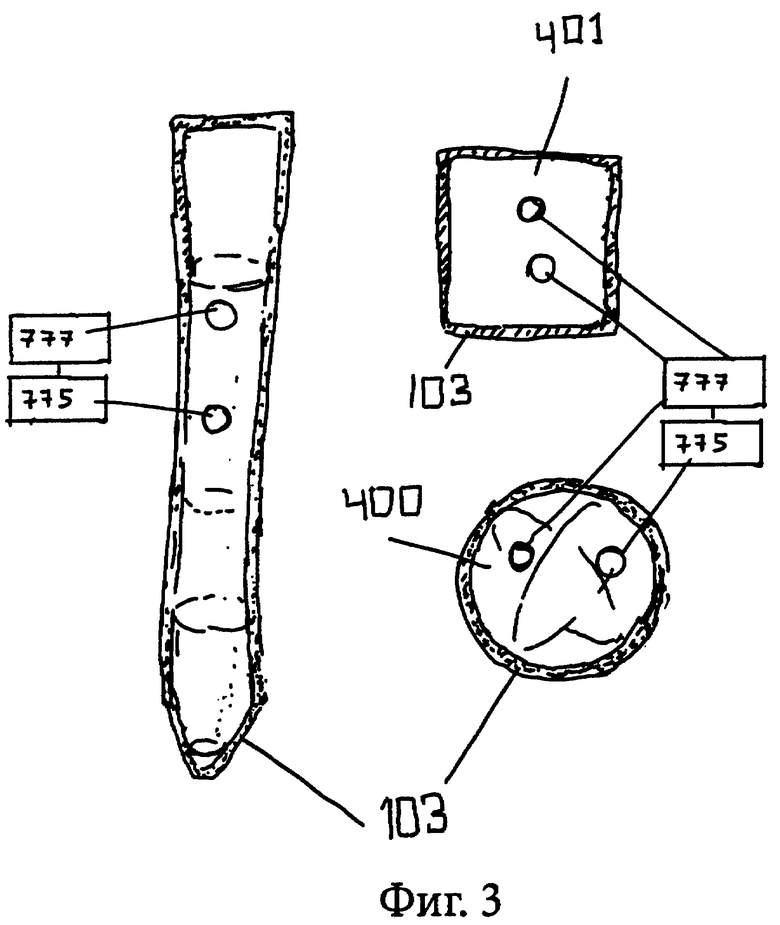
На фиг.3 показано устройство с полной сенсорной поверхностью 103 на манипуляторе в форме обычной ручки манипулятора 100, шара 400, квадрата, реагирующее на руки пользователя, со способностью отслеживать перемещение рук и пальцев пользователя. Сенсорное покрытие может быть съемным, клейким, что дает возможность модернизировать практически любое устройство для использования с технологией пассивного управления.
На фиг.4 показан пример использования отслеживанием перемещения рук 50 по сенсорному покрытию 103. Перемещение может происходить в основном режиме использования положением рук устройства при работе с ним, и перемещением по поверхности пальцев, как при работе с обычным манипулятором. Данные, полученные системой, могут быть использованы в зависимости от настроек. Это может быть перемещение курсора, регулировка звука или прокрутка.
На фиг.5 показано дополнительное использование поверхности устройства в форме ручки 100 круглой формы, снабженного сенсорным покрытием на корпусе 103. В данном примере показано перемещение по устройству пальцев в двух направлениях для управления горизонтальной и вертикальной прокрутками 150 в браузере в компьютере.
На фиг.6 показано использование сенсорного покрытия 103 на шаре 400 для определения рук 50. Используется перемещение через прокрутку шара в руках и при нажатии на кнопку, постукивание по шару 400 манипулятору.
На фиг.7, 7b показана самая упрощенная конструкция устройства для работы с системой. Положение руки 50 на устройстве определяется через простые триггеры-кнопки 102, размещенные на корпусе устройства в виде 100 ручки. Триггеры активируются при взятии устройства определенным образом, тем самым передавая сигналы о том, каким образом удерживается устройство. Когда пользователь удерживает устройство управления, он производит давление, достаточное, чтобы активировать даже самые триггеры-кнопки 102 любого типа, что позволяет удешевить конструкцию еще больше. Кроме того, для такого механизма не требуется даже каких-либо электронно-вычислительных компонентов. Такая система может быть использована в пишущих инструментах, таких как механические карандаши, ручки, кисточки, маркеры, а также любых устройствах, таких как фены, миксеры, пилы, бензопилы, паяльники, микроволновые печи, чайники, телефоны, компьютеры, замки, рули, пульты, отдельные кнопки, игровые приставки, игровые контроллеры, покрытие пола, замки, оружие и так далее. Все подобные устройства работают по принципу датчиков, расположенных на поверхности, реагирующих на контакт, передающих состояние в систему 777, которая может быть как микрочипом, так и сложной компьютерной системой или просто механическим механизмом, которая производит действия 775.
На фиг.8 показано использование устройства в форме 100 с покрытием, способным определять более точно местоположение, чем две кнопки, состоящие из большого набора кнопок на площади устройства, тем самым давая больший контроль для управления положением руки 50 на устройстве.
На фиг.9а, 9b показан еще один вариант упрощенной конструкции на устройстве формы 100 ручки манипулятора. Устройство представляет собой кнопку 141 на подвижной основе вдоль корпуса. Перемещая руку 50 по устройству, пользователь перемещает с собой и подвижную кнопку, определяя и передавая положение руки на устройстве. Кроме того, перемещается также и кнопка 141, которая может быть использована в качестве дополнительного устройства контроля, что позволяет дотянуться до нее с любого положения руки на манипуляторе. Такая технология особенно удобна в манипуляторах в форме ручки для более точного контроля с возможностью нахождения кнопки в любом положении.
На фиг.10 показана конструкция, подобная фиг.9а. В этом случае используется кольцо 140 или защитное покрытие поверх подвижной кнопки 141. Система имеет шкалу координат 310 минимального и максимально возможного перемещений кнопки на подвижном элементе вдоль корпуса. Место 310 нахождения подвижного элемента на корпусе, перемещающегося по шкале, дает знать системе, в каком положении находится рука пользователя. Для перемещении кольца 140 или кнопки на подвижной основе пользователь либо сам передвигает кольцо 140 перемещением руки, либо возврат осуществляется автоматически с помощью пружинного механизма. Перемещаемое кольцо также служит держателем устройства.
На фиг.11 показано устройство в форме компьютерного пера 100 с сенсорным покрытием 103 вокруг корпуса или датчиков 101, способных определять перемещение руки 50, показано каким образом удерживание руки влияет на процесс работы. Если ручку взять ближе к концу, то может производиться определенное действие, в данном случае изменения размеров кисти 220 для рисования в компьютерной графической программе, а если ручку взять за конец, то курсор увеличится или произойдет переключение на другую кисть. Изменение может происходить постепенно, по мере перемещения руки по корпусу инструмента. Данный способ интересен тем, что он очень интуитивен и предлагает еще более удобное управление. Дело в том, что чем ближе держать ручку к нижнему краю, тем больше контроля и проще нарисовать точную линию, а если брать за верхний конец устройства, то происходит больший контроль над площадью, но снижается точность. Этот факт используется при управлении системой пассивного управления, давая в руки тот инструмент, который нужен в данном случае при таком положении руки. Также это может использоваться во многих случаях, например, при обычной работе с системой. Если взять инструмент ближе к нижней части, то система будет производить двойные клики по объектам; если взять выше, то система может показать все активные окна для выбора или открыть панель запуска программ.
На фиг.12 показано использование корпуса манипулятора в качестве дополнительной оси контроля. Перемещая объекты в трехмерном пространстве, можно управлять слоями в операционной системе или слоями в графической программе. При использовании данной технологии пассивного управления это становится значительно удобнее любых других средств, так как такие функции нечасто востребованы, но и одновременно необходимы и требуют точной фиксации, что делает сложной реализацию их с помощью кольца прокрутки на мыши, а лишние кнопки занимают место и сложны в использовании.
На фиг.13 показаны датчики 101, 102, 103 давления, расположенные на игровом контроллере 120 для определения положения рук или руки на манипуляторе. Подобные датчики даже в самом простом варианте предлагают новый уровень использования таких устройств. Датчики позволяют определить, каким образом пользователь удерживает устройство, какой рукой и за какое место, и при необходимости количество пальцев. Раньше такое было невозможно.
На фиг.14 показан пример работы датчиков 102 давления на игровом контроллере 120. В зависимости от захвата или положения руки игра самостоятельно реагирует. На этом примере показывается автоматическая смена оружия в зависимости от захвата игрового котроллера. Если датчики показывают давление только на правой стороне устройства, то игра автоматически переключает оружие на пистолет в правой руке. Если взять контроллер в левую руку, то оружие переместится в левую руку. Если взять контроллер за центральную часть, то оружие переключается на гранату. Таким образом можно запрограммировать на любое действие положения датчиков. Все зависит от типов датчиков и настроек программного обеспечения.
Система анализа положения руки на устройстве в данном случае очень востребована, так как на игровых контроллерах нельзя размещать много кнопок, поскольку это будет затруднять управление игровым процессом, а все действия должны быть максимально интуитивные. Однако современные игры требуют все больше возможностей для управления, увеличение которого за счет традиционных средств вредит игровому процессу и создает трудности для пользователя. Система анализа положения на манипуляторе решает все проблемы. Управлять игрой можно, просто удерживая контроллер определенным образом, что позволяет получить больше контроля, чем использование каких-либо гироскопов. Также система может использоваться совместно с другими устройствами позиционирования для еще большего эффекта.
Еще один пример функции, выполняемой в игровом контроллере или других устройствах. Датчики фиксируют реакцию на подаваемые контроллером сигналы обратной отдачи или сигналы другого типа.
Например, игра может подавать сигналы, такие как вибрация игрового контроллера, до тех пор, пока пользователь не произведет определенные действия, например, возьмет контроллер по-другому. Использования системы пассивного управления в игровых контроллерах позволяет назначать даже отдельной кнопке манипулятора множество функций. Теоретически даже при наличии одной кнопки на устройстве и системы пассивного управления на корпусе можно сделать неограниченное количество комбинаций для управления.
На фиг.15 показан пример использования технологии пассивного управления в компьютерной мыши 115, как в инструментах типа ручки, используя корпус и захват руки 50 в качестве сигналов компьютеру. В данном случае показано перемещение по слоям 240 и активированный слой 249 в зависимости от положения руки 50. Это позволяет произвести определенные действия еще до того, как пользователь сделал какие-либо действия. Данные передаются сразу, как только пользователь взял в руку инструмент. Датчики на мыши могут располагаться на всей поверхности манипулятора, на ребрах, на отдельных кнопках, а также проводе. Такой принцип может не использоваться далее в любых компьютерных манипуляторах. Клавиатуры всех видов могут определять положение рук пользователя, и можно производить определенные действия. Например, при размещении рук в положении для набора текста компьютер может автоматически открыть текстовую программу и сохранить ее на определенное время, если убрать руки с устройства. Еще, например, система может отследить, какой рукой пользователь пользуется, одной или двумя, левой или правой, и изменить функцию кнопок. Если клавиатура может изменять вид кнопок, то изменяет размер клавиш и тип клавиш на подобные, но только в более усложненном виде.
На фиг.16 показано использование датчиков 102 давления на руле 111 управления. Датчики, установленные тем или другим образом, могут определять направление и положение рук, количество рук и тип конечностей. Это один из типов устройств, которые могут быть созданы на базе пассивного управления. Шарик и другие устройства подобного типа могут отслеживать перемещение пальцев пользователя, реагировать на касания пальцами. Внутри шара могут находиться компоненты, как в любых других известных манипуляторах, для передачи данных системе для обработки и произведения действий на сигналы покрытия датчиков. Можно привязывать определенные функции к разному типу охвата его руками, как одной, так и обеими. Можно распознавать количество пальцев одновременно на поверхности, можно использовать два шара одновременно для большего контроля, зарядка такого устройства может осуществляться при помещении его в держатель, где он может использоваться как обычный трекбол. Если устройство в виде цилиндра похоже на ручку, его можно ставить на зарядку и использовать как ручку управления.
На фиг.17 показаны датчики 102 давления для определения положения руки 50 на портативном устройстве. Таким устройством может быть компьютер, портативный компьютер, телефон, плеер. В данном случае устройство определяет положение большого пальца руки, чтобы определить, каким образом пользователь вводит данные в устройство: большим пальцем левой руки или указательным пальцем правой руки, или ручкой. В зависимости от этого происходит увеличение элементов управления на экране для более удобного набора и большего отображения объектов на экране одновременно. Такие устройства могут использовать несколько типов покрытий. Они могут использовать для кликов как отслеживание площади активной конечности, такой как палец, так и реагировать на давление, производимое одним пальцем или всей рукой на заданную силу.
На фиг.18 показаны примеры возможного определения положения руки на примере устройства типа ручки. В зависимости от типа датчиков и настроек идентификация положения руки удерживаний рук при использовании может быть еще более разнообразной. Могут распознаваться отдельные пальцы, типы конечностей, левая или правая рука, отслеживаться перемещения во время использования устройства. Возможно определение наклона руки, определение стороны объекта, повернутого к устройству при использовании. Датчики могут быть точными настолько, что способны считывать отпечатки пальцев, однако самые простые и дешевые датчики, реагирующие на точку положения руки на корпусе, всегда будут удобнее и интуитивны в работе.
На фиг.19 показаны возможные места размещения покрытия или датчиков 101 для разных типов устройств. Комбинация видов размещения и типов датчиков может быть бесконечной. Смысл заключается в том, что для каждого типа устройств и необходимости задач подбирается нужный тип датчиков, а также место положения датчиков на устройстве в тех местах, где нужно получить информацию о местонахождении руки. Даже просто размещенные датчики без какой-либо системы могут использоваться в качестве системы активного управления. Например, обычный выключатель на любом из устройств заменяется датчиками на поверхности устройства, чтобы активировать устройство, если пользователь замкнет на них контакты, взяв устройство в руку. Если требуется анализ всей поверхности объекта, датчики могут размещаться в определенной последовательности, что снизит производство покрытия, а также позволит применить другой тип датчиков, чем сенсорная поверхность на всей площади устройства.
На фиг.20 показано размещение датчиков 101 положения руки не только на самом манипуляторе, но и на кнопках и устройствах управления на корпусе манипулятора. Таким образом, можно управлять одной кнопкой или аналоговой ручкой управления по-разному, в зависимости от того, как удерживать кнопку управления. Размещение на кнопках может осуществляться как размещение сверху на поверхности на самих кнопках, включение в конструкцию датчиков. Возможен также вариант, когда сама конструкция кнопки позволяет улавливать малейшие соприкосновения с ней. Данные передаются в систему для обработки данных, которая по количеству и месту расположения активированных датчиков определяет положение руки.
На фиг.21, 22 показано использование аналоговой ручки 121 на манипуляторе, снабженном датчиками положения для измерения положения руки 50, в зависимости от того, как или за какую часть пользователь держит устройство, производя разные действия. Например, при использовании контроллера в игре, можно одной ручкой управлять сразу несколькими типами объектов и осями координат, если взять ручку за верхнюю часть, то можно управлять заданным на это положение объектом, если взять за нижнюю часть, то произойдет автоматическое переключение на другой запрограммированный объект. Управлением занимается система, принимающая информацию с датчиков. Все, что нужно системе, - это информация с датчиков и информация о местоположении их на поверхности, на которой нужно определить местоположение руки пользователя. Чем больше датчиков, тем больше возможности управления. Датчик может быть один, такой как сенсорное покрытие, но покрывать следует поверхность манипуляторов.
На фиг.23-25 показано использование покрытия или датчиков 100 давления на поверхности оружия, в частности, на прикладе, ручках, курке. Простейшие датчики позволяют определить положение, в котором оружие используется, и производить определенные действия. Например, если оружие удерживается одной рукой, то оружие производит одиночные выстрелы, если оружие удерживается двумя руками, то оружие автоматически переключается в автоматический режим, а если все датчики активированы, то оружие может переключиться на альтернативный режим работы. Такие датчики на оружии позволяют сэкономить время и упростить использование оружия. Также датчики могут быть использованы для других целей, таких как идентификация пользователя по определенному типу удерживания и по биометрическим данным. Данные с датчиков 101 поступают в систему 777 для обработки и анализа для выполнения запрограммированных действий.
Датчики расположены в разных местах, позволяя определить положение оружия. Информация передается в микропроцессор для выполнения заранее заданных действий на это положение. Датчики могут размещаться на ручках, на курках, на прикладе для определения контакта с плечом.
На фиг.26 показан один из вариантов использования системы в простых устройствах. В данном случае это фен, который реагирует на положение руки. На фиг.27 показана зубная щетка, которая работает в разных режимах в зависимости от того, как она удерживается руками. Таким образом, систему можно применять в любых устройствах, отвертках, пультах, автомобилях, телевизорах, миксерах, плеерах, газонокосилках, бритвах, выключателях без каких-либо модификаций. Теоретически можно разместить переключатель режима работы таким образом, что, перемещая руку, он активируется, выполняя различенные действия. На фиг.28 показан пример использования системы в автомобиле. В зависимости от охвата или положения рук система ведет себя по-разному. В этом случае могут применяться не только датчики на руле управления, но и датчики внешние, такие как видео-фото сенсоры, отслеживающие перемещение. Датчики способны определять температуру и движение.
Для того, чтобы система работала, необходим как минимум микропроцессор с заложенными данными о реакции на положение датчиков и сами датчики. Датчики могут использоваться любого типа. Все зависит от необходимости наличия возможностей на устройстве, куда нужно внедрить систему, а также стоимости и возможности установления на данный тип конструкции.
На фиг.29 показаны разные типы датчиков 103 сенсорного типа наподобие тачпада. Они могут покрывать как часть, так и всю поверхностью устройства, улавливать передвижения сразу нескольких объектов на них. Они могут также определять вес. Такие датчики могут при изменении режима работать в активном способе управления или комбинированном, предлагая разные возможности контроля для активных частей пользователя и слабоактивных на корпусе устройства. Обычные датчики с покрытием могут быть датчиками любого типа, внедренными в покрытие поверхности: датчики 160, работающие на электрическом принципе, реагируя на контакт; простейшие триггеры - это кнопки 102, реагирующие как автоматически на пользователя возле них, так и при нажатии пользователем при использовании; или механические датчики, которые могут быть разнообразными, это могут быть кнопки, рычажки, зажимы, механические детекторы веса. Это могут быть кнопки, как обычные, так и сенсорные, с возможностью определения веса и других параметров. Позицией 102b обозначен датчик типа простой кнопки 102, спрятанной под поверхностью устройства, которая может быть разного размера и быть даже целой стороной устройства, определяющей положение пользователя при использовании устройства. Датчики 185 лучевого типа, инфракрасные, лазерные, оптические способны улавливать перемещение пользователя на расстоянии. Это может использоваться для определения перемещения и определения конечностей пользователя при смене охвата устройства. Таким образом, можно отслеживать передвижение, например, пальцев еще до того, как они переместились из одной части манипулятора в другую. Также датчики такого типа могут определять цвет поверхности, различать участки кожи, что можно использовать для определения стороны конечности и типа поверхности, а также наклон во время использования. При этом можно отслеживать скорость передвижения конечностей пользователя или других объектов над манипулятором, а также расстояния до объекта и отдельных его точек. Позицией 140 обозначена движущаяся часть, которая может использоваться для определения положения, перемещаясь с рукой пользователя. Такое устройство может быть снабжено пружиной для автоматического возврата в нужное положение. Позиция 145 отображает кнопку на подвижной основе наподобие 140, однако при этом, перемещаясь, она перемещает с собой дополнительную кнопку для дополнительных действий пользователем. Позиция 180 - это датчики со щетиной, способные улавливать передвижения по ним любых объектов. Датчики 600 работают по принципу фото-видео или лучевому отслеживанию перемещения объектов и могут использоваться для определения положения ног и общего положении пользователя к устройству при работе с ним.
Датчики любых типов могут быть использованы в системе по мере необходимости выполнения поставленных задач при проектировании устройства с функцией пассивного управления. Датчики могут использоваться как вместе, так и по отдельности, и друг над другом. Принципы использования и работы датчиков для определения объектов широко известны и могут быть использованы в системе пассивного управления. В результате использования датчиков можно определять и использовать в качестве параметра управления вес, расположение, скорость передвижения, давление, производимое как специально, так и при использовании, цвет специализированный и цвет кожи, температуру поверхности и пользователя, расстояние до точек объекта, тип, сторону, площадь контакта или размер объекта, наклон отдельных точек на конечностях пользователя, в частности, руках и пальцах. Такие данные могут быть использованы как для идентификации, так и для отслеживания наиболее активных и пассивных участков конечностей. Датчики позволяют отслеживать места сгиба конечностей, отслеживать сразу несколько конечностей одновременно, определять тип конечности, создавать более точную карту для использования системы идентификации и для распознавания типа конечности. Датчики могут работать как по отдельности, так и в группах. Датчики могут быть размещены, например, в полу или ботинках пользователя для определения положения и направления ног и вообще измерять состояние нахождения пользователя по нагрузке на определенные участки ног.
На фиг.31 показано различие между активными частями 52 конечности и пассивными участками 53 руки. Они различаются тем, что активные части способны использовать датчики как стандартные манипуляторы или использовать дополнительные стандартные средства ввода. Пассивная же часть руки, как правило, остается неподвижной после того, как пользователь взял в руку инструмент, и следовательно, как положение пассивной части можно использовать другие действия системы. Система может распознавать как в ложном виде, анализируя наиболее активные участки по показаниям датчиков, так и использовать заранее предустановленные настройки для определения активных и пассивных частей. Когда система знает, какая из частей тела активна, она может назначать разные действия на разные области или просто игнорировать активные части, используя только пассивные. Например, если сенсорное покрытие покрывает всю область ручки, то можно назначить для активной части руки несколько виртуальных кнопок, а для пассивной - переключения работы активных кнопок. На фиг.32 показано размещение руки на плоском манипуляторе при удерживании. Можно назначить только некоторым пальцам 52 активный режим работы, а остальной, менее подвижной части руки 53, назначить пассивный режим работы. Однако при смене положения они могут поменяться местами.
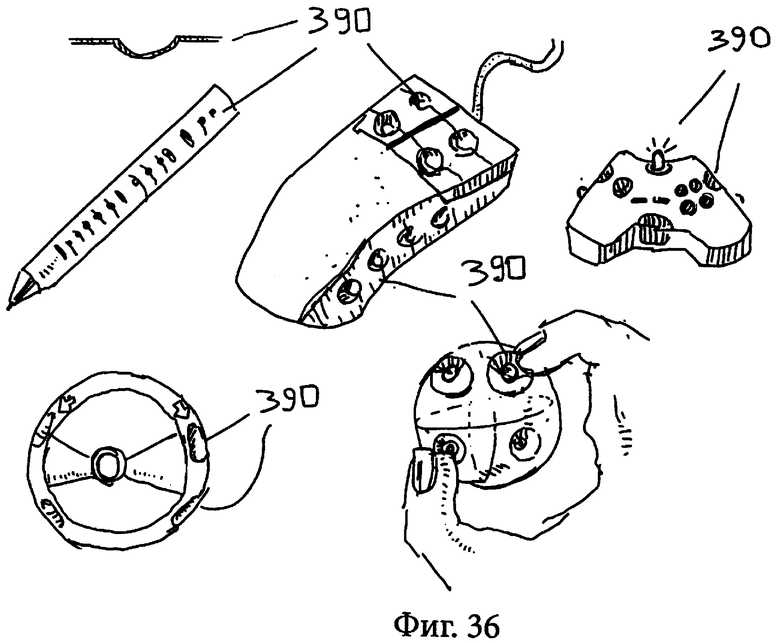
На фиг.36 показаны возможные варианты размещения меток 390 на корпусе устройства, помогающие правильно взять устройство в руку для правильного использования. Это могут быть метки, нарисованные на корпусе, выпуклые части, вдавленные части. Это могут быть также визуально активные передающие сигналы, как лампочки, так и отдельные дисплеи. Могут быть звуковые сигналы, подающиеся в зависимости от того, как пользователь взял в руку устройство, использует его, или переключением режима работы.
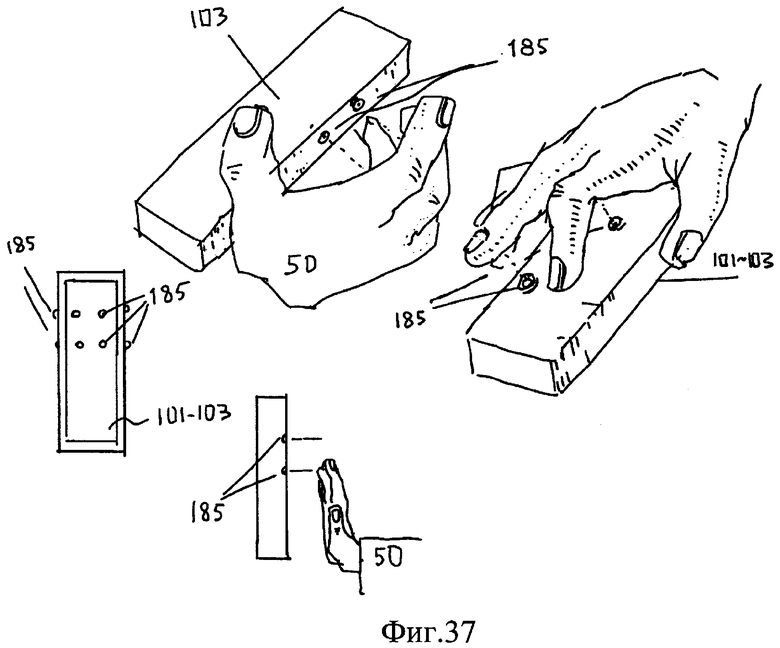
На фиг.37 показаны примеры использования на одном устройстве обычных датчиков 101, 102, 103 и оптических датчиков 185. Обычные соприкосновения руки 50 могут определить обыкновенные датчики, а в случае, если нужно определить перемещение на расстояние или расстояние до объекта, используются оптические датчики 185. Такая система датчиков позволяет сделать систему еще более гибкой и ускорить работу с ней, система может определить действие еще до того, как оно было сделано.
На фиг.38, 39 показано использование ног, это могут быть просто педали в автомобиле, реагирующие на давление. Положение ног передается в систему 775, и осуществляются требуемые действия 755. Это также могут быть датчики, встроенные в пол или другую поверхность, для определения положения ног, а также самого пользователя, и передачи в систему 777, с которой он ведет работу для выполнения действий 775.
На фиг.40 показано определение положения руки 50 пользователя на устройстве, снабженном поверхностью, улавливающей положение пользователя 101 на устройстве во время работы. Область 900 определения используется для многих типов устройств, больше и не нужно, и для этого достаточно одного простейшего датчика.
На фиг.41 показано использование датчика на сенсорной поверхности 103, расположенной на всей части поверхности и способной определять давление со всего участка для определения контакта с рукой 50 пользователя. Показана также кривая 330 данных, которую видит компьютер и которые могут быть использованы для анализа системой определения положения руки.
На фиг.42 показан пример той же сенсорной поверхности, расположенной частично на тех участках, где нужно определить положение руки 50 пользователя на устройстве. Видно, что данные идентичны, несмотря на то, что стоимость размещения частичного покрытия на корпусе устройства дешевле, покрытие устройства полным сенсорным датчиком.
На фиг.43 показан пример использования вместо сложных сенсорных покрытий 103 более простого 102, которым могут быть обычные кнопки, реагирующие на вес пользователя 50. В этом случае компьютер получает менее точную информацию 330 для обработки, однако расположение пальцев все же улавливается и даже становится более четким для распознавания.
На фиг.44 показан пример, когда данные 330 передаются датчиком компьютеру для обработки. Датчики, расположенные на сенсорном покрытии инструмента типа ручки 100, могут быть использованы в зависимости от настроек. Сенсорное покрытие улавливает точное перемещение и давление каждого пальца на устройстве. Подобные информационные данные можно получать с любого типа датчиков. Точность данных зависит от типов датчиков. Простые датчики могут передавать только простейший сигнал одного типа. При возможности передачи информации не только о местоположении объектов на поверхности, но и наличия информации о давлении, можно производить управление с помощью давления, также это позволит создать более точную карту руки или другой конечности, подсчитав ее вес.
На фиг.45 показан пример положения датчиков на перемещение по ним руки 50 пользователя. Точки соприкосновения передаются в систему как показания о месте нахождения объекта на поверхности. Размер точек может варьироваться. Например, если это обычная кнопка и она является точкой определения веса, то она может занимать весь корпус устройства, передавая лишь один сигнал при перемещении; но если это сенсорное покрытие, оно может передавать тысячи сигналов о перемещении.
На фиг.46 показан пример размещения датчиков 102 давления под поверхностью 88. Датчики размещены под корпусом и реагируют на давление.
Самый простой способ применения технологии, показанный на фиг.26, 27, примененный в простейших устройствах, это обычный тип датчиков-триггеров или кнопок, расположенных на корпусе устройства таким образом, что они активируются в зависимости от того, как пользователь держит устройство, не прилагая каких-либо дополнительных действий, таких как нажатие дополнительных переключателей. Это может выглядеть, например, как две кнопки включения устройства, расположенные на разных уровнях ручки устройства. Каждая кнопка включает устройство в определенном режиме и выключает в случае исчезновения давления на нее, производимого рукой при удержании устройства во время использования. На фиг.7b показано примерное устройство такого механизма, который в качестве системы 777 обработки сигнала с простейших триггеров давления 102 может использовать как простой микропроцессор, так и еще более простую механическую систему, реагирующую на физическое воздействие. Такая система может быть использована в любых пишущих инструментах, обыкновенных карандашах, ручках, фломастерах. Например, можно разместить под корпусом устройства отверстие, которое в случае удерживания устройства определенным образом, будет производить больший выброс чернил.
На фиг.47 показано использование различной информации с разных типов датчиков 120, поступающей в систему. Для определения захвата рукой предмета используются различные типы датчиков, такие как сенсорные и оптические. При этом датчики могут располагаться как на площади объекта, с которым происходит касание, так и на самой руке 50 могут находиться датчики. При наличии нескольких датчиков одновременно может использоваться информация со всех сразу. Система начинает действовать сразу, как только пользователь взял в руку инструмент, передавая сигналы системе.
Изобретение представляет собой совершенно новое направление в управлении устройствами. Способ пассивного управления позволяет полностью поменять подход к управлению любым устройством. При этом без каких-либо дополнительных расходов даже уже существующие устройства и манипуляторы могут быть модернизированы путем размещения специальных наборов с сенсорной поверхностью, наносимой с помощью клея, как на пустые участки манипуляторов под слабоактивные части руки, так и на кнопки манипуляторов управления.
Изобретение относится к устройствам управления и ввода данных, а именно к устройству, использующему в качестве данных, получаемых от пользователя, положение рук на манипуляторе. Технический результат заключается в обеспечении возможности управления устройством, используя поверхность устройства, не предназначенную для прямого ввода информации пользователем. Для этого устройство имеет датчики на поверхности устройства управления для использования положения и охвата конечности пользователя на манипуляторе в качестве ввода данных. Способ включает в себя шаги определения конечности пользователя на устройстве и производимые действия в ответ на заданное положение конечности пользователя. Управление устройством осуществляется в зависимости от типа конечности, ее положения и охвата манипулятора управления. 2 н. и 93 з.п. ф-лы, 50 ил.
1. Способ пассивного управления устройством, в частности компьютерной системой, содержащий, по меньшей мере, один датчик, поверхность которого является управляющей, корпус манипулятора для ввода данных, реагирующий на положение, по меньшей мере, одной части конечности пользователя, в частности такое положение, как охват корпуса манипулятора рукой или придерживание во время использования, заключающийся в том, что
определяют положение конечности пользователя слабоактивной части руки при использовании устройства, по меньшей мере, в одной точке,
определяют посредством датчиков, по меньшей мере, одну точку контакта пользователя с устройством ввода,
сравнивают данные датчиков о контакте с заранее заданными данными в ответ на определенное положение руки пользователя,
в случае хотя бы примерного совпадения данных датчиков с заданными данными осуществляют выполнение заданного действия.
2. Способ по п.1, отличающийся тем, что дополнительно определяют более активные части конечностей и менее активные части, назначают действия на части конечностей в зависимости от их активности.
3. Способ по п.1, отличающийся тем, что дополнительно идентифицируют пользователя, по меньшей мере, по одной его конечности, осуществляют загрузку настроек для определенной конечности.
4. Способ по п.3, отличающийся тем, что загружаемые настройки могут содержать размер конечности, анатомическое обозначение конечности, настройку действий системы на положение конечности, по меньшей мере, одной ее части, информацию об активности отдельных частей конечности.
5. Способ по п.1, отличающийся тем, что заложенное действие подразумевает перевод устройства активного ввода в другой режим работы.
6. Способ по п.1, отличающийся тем, что заложенное действие подразумевает перевод датчиков в другой режим, в частности в режим активного использования.
7. Способ по п.1, отличающийся тем, что заложенное действие подразумевает выполнение заданной, по меньшей мере, одной функции, прежде всего, операционной системы.
8. Способ по п.1, отличающийся тем, что заложенное действие подразумевает использование перемещения по корпусу устройства в качестве, по меньшей мере, одной оси управления.
9. Способ по.1, отличающийся тем, что определение положения может зависеть от силы давления, прежде всего, сжатия корпуса в руке пользователем, по меньшей мере, в одной точке.
10. Способ по п.1, отличающийся тем, что определение положения может зависеть от местоположения, по меньшей мере, одной точки руки на покрытии корпуса устройства ввода.
11. Способ по п.1, отличающийся тем, что определение положения подразумевает определение положения, по меньшей мере, одной части, по меньшей мере, одного пальца.
12. Способ по п.1, отличающийся тем, что определение положения подразумевает определение скорости перемещения, по меньшей мере, одного пальца пользователя.
13. Способ по п.1, отличающийся тем, что определение положения подразумевает определение, по меньшей мере, одной руки пользователя.
14. Способ по п.1, отличающийся тем, что датчики, реагирующие на контакт, являются оптически лучевыми и реагируют на расстоянии при перемещении над ними пользователя.
15. Способ по п.1, отличающийся тем, что датчики реагируют на размер площади контакта с поверхностью.
16. Способ по п.1, отличающийся тем, что датчики являются простыми триггерами, реагирующими на нажатие, при этом количество датчиков, активированных в один момент, говорит о положении объекта на площади устройства.
17. Способ по п.1, отличающийся тем, что определение положения подразумевает определение отдельной стороны конечности, повернутой к устройству.
18. Способ по п.1, отличающийся тем, что определение положения подразумевает определение изогнутости конечности при контакте с устройством.
19. Способ по п.1, отличающийся тем, что определение положения наклона, по меньшей мере, одной части конечности подразумевает наклон конечности по отношению к устройству.
20. Способ по п.1, отличающийся тем, что определение положения конечности подразумевает анализ охвата рукой вокруг устройства, по меньшей мере, с двух сторон.
21. Способ по п.1, отличающийся тем, что определение точек контакта пользователя с устройством подразумевает точное положение, по меньшей мере, одной руки на устройстве.
22. Способ по п.1, отличающийся тем, что устройство представляет собой устройство ввода информации пользователем в компьютер.
23. Способ по п.1, отличающийся тем, что пользователь сам назначает производимые действия системой на положение руки.
24. Способ по п.1, отличающийся тем, что система способна к самообучению, корректируя поступаемые данные от пользователя.
25. Способ по п.1, отличающийся тем, что происходит определение, по меньшей мере, одной менее активной части конечности пользователя.
26. Способ по п.1, отличающийся тем, что определяют, по меньшей мере, одну более активную часть конечности пользователя.
27. Устройство ввода данных пользователем, такое как манипулятор, содержащее корпус, на котором расположен, по меньшей мере, один датчик, позволяющий определять положение конечностей пользователя по отношению к поверхности устройства путем определения того, как пользователь производит удерживание, средство анализа полученных от датчиков данных о контакте, по меньшей мере, менее активной части руки на корпусе устройства во время охвата или придерживания устройства во время использования, средство сравнения полученных данных с заранее заданными данными, соответствующими определенному положению руки пользователя, хранящимися в средстве памяти.
28. Устройство по п.27, отличающееся тем, что, по меньшей мере, один датчик расположен на поверхности пользователя или его конечностях.
29. Устройство по п.27, отличающееся тем, что, по меньшей мере, один датчик размещен вне манипулятора и пользователя.
30. Устройство по п.27, отличающееся тем, что датчик представляет собой фотовидеоэлемент, фиксирующий изменения.
31. Устройство по п.27, отличающееся тем, что датчики используют оптические, лазерные, инфракрасные лучи.
32. Устройство по п.27, отличающееся тем, что датчики являются тепловыми.
33. Устройство по п.27, отличающееся тем, что датчики реагируют на поворот частей устройства для определения положения.
34. Устройство по п.27, отличающееся тем, что датчик представляет собой датчик давления.
35. Устройство по п.34, отличающееся тем, что датчик давления представляет собой кнопку, активируемую при работе с устройством.
36. Устройство по п.27, отличающееся тем, что датчики представляют собой сенсорное покрытие и предназначены для определения, по меньшей мере, положения на нем, по меньшей мере, одного объекта.
37. Устройство по п.36, отличающееся тем, что сенсорное покрытие выполнено с возможностью отслеживать силу нажатия на него объектом(-ами).
38. Устройство по п.36, отличающееся тем, что сенсорное покрытие выполнено с возможностью отслеживать множество объектов на нем одновременно.
39. Устройство по п.36, отличающееся тем, что сенсорное покрытие покрывает большую часть устройства.
40. Устройство по п.36, отличающееся тем, что сенсорное покрытие имеет скругленную форму в виде цилиндра.
41. Устройство по п.36, отличающееся тем, что сенсорное покрытие выполнено шарообразной формы.
42. Устройство по п.27, отличающееся тем, что датчиком является механический переключатель, определяющий положение, активируемый пользователем при работе с манипулятором.
43. Устройство по п.27, отличающееся тем, что система способна идентифицировать пользователя по данным, сохраненным ранее.
44. Устройство по п.27, отличающееся тем, что система способна сохранять получаемые данные.
45. Устройство по п.27, отличающееся тем, что система способна загружать личные настройки пользователя.
46. Устройство по п.27, отличающееся тем, что датчики расположены скрытно как для пользователя, так и для окружающих.
47. Устройство по п.27, отличающееся тем, что датчик представляет собой кнопку, реагирующую на нажатие.
48. Устройство по п.27, отличающееся тем, что датчик распложен на подвижной основе с возможностью передвижения на манипуляторе.
49. Устройство по п.27, отличающееся тем, что датчики работают независимо от устройства, к которому они прикреплены.
50. Устройство по п.27, отличающееся тем, что датчики являются съемными для замены и модернизации устройств реакции на положение конечностей на корпусе устройства.
51. Устройство по п.27, отличающееся тем, что датчики давления используются для выполнения других функций как обычные устройства активного управления и оповещения.
52. Устройство по п.27, отличающееся тем, что датчики располагаются на других датчиках, таких как активные части управления устройства ввода, для определения, каким образом пользователь их использует.
53. Устройство по п.27, отличающееся тем, что устройство ввода данных является манипулятором для управления компьютерной системой.
54. Устройство по п.53, отличающееся тем, что манипулятором является компьютерная мышь.
55. Устройство по п.53, отличающееся тем, что манипулятор является игровым контроллером.
56. Устройство по п.53, отличающееся тем, что манипулятором является клавиатура.
57. Устройство по п.53, отличающееся тем, что манипулятором является устройство управления пользователем в форме ручки, в частности цифровое перо для управления курсором.
58. Устройство по п.27, отличающееся тем, что устройством является пишущий инструмент в форме ручки.
59. Устройство по п.27, отличающееся тем, что устройством управления является пульт управления, такой как пульт дистанционного управления.
60. Устройство управления по п.27, отличающееся тем, что представляет собой инструмент, включаемый и управляемый по положению руки на его корпусе.
61. Устройство по п.60, отличающееся тем, что инструментом является прибор для полости рта, такой как зубная щетка.
62. Устройство по п.60, отличающееся тем, что инструментом является вращательный прибор, такой как отвертка.
63. Устройство по п.60, отличающееся тем, что инструментом управления является нагреватель, в частности фен.
64. Устройство по п.60, отличающееся тем, что инструментом является режущий инструмент, такой как автоматический режущий инструмент, такой как пила.
65. Устройство по п.60, отличающееся тем, что инструмент используется для приготовления пищи.
66. Устройство по п.58, отличающееся тем, что инструмент используется для очистки поверхностей.
67. Устройство по п.27, отличающееся тем, что устройством является корпус портативного компьютерного устройства, частью которого может быть сенсорный экран.
68. Устройство по п.27, отличающееся тем, что по показанию датчиков определяется, какой рукой именно происходит управление.
69. Устройство по п.27, отличающееся тем, что по показанию датчиков определяется положение руки, по меньшей мере, на корпусе устройства.
70. Устройство по п.27, отличающееся тем, что по показанию датчиков определяется положение пальцев пользователя.
71. Устройство по п.27, отличающееся тем, что датчики предназначены для измерения давления, оказываемого на них, и могут быть использованы для определения веса, по меньшей мере, части одной конечности.
72. Устройство по п.27, отличающееся тем, что датчики могут быть комбинированные и использовать в одном датчике сразу несколько признаков датчиков одновременно.
73. Устройство по п.27, отличающееся тем, что датчики могут определять реакции пользователя, в частности его конечности на передаваемые сигналы обратной связи.
74. Устройство по п.27, отличающееся тем, что датчики могут измерять температуру пользователя, которая используется для управления.
75. Устройство по п.27, отличающееся тем, что данные, получаемые с датчиков, динамические и поступают по мере их изменения.
76. Устройство по п.27, отличающееся тем, что устройством ввода может являться сам датчик или группа датчиков.
77. Устройство по п.27, отличающееся тем, что устройством ввода является дисплей.
78. Устройство по п.27, отличающееся тем, что устройством ввода является компьютер.
79. Устройство по п.27, отличающееся тем, что датчики предназначены для определения, какой стороной конечности потребитель прикасается к датчику.
80. Устройство по п.27, отличающееся тем, что датчики предназначены для распознавания цвета того, чем пользователь прикасается к ним.
81. Устройство по п.27, отличающееся тем, что датчики предназначены для распознавания скорости, с которой перемещаются конечности пользователя на устройстве.
82. Устройство по п.27, отличающееся тем, что датчики предназначены для распознавания и отслеживания передвижения конечностей пользователя на расстоянии до прямого контакта или во время перемещения по устройству.
83. Устройство по п.27, отличающееся тем, что датчики предназначены для определения расстояния до пользователя или его частей.
84. Устройство по п.27, отличающееся тем, что устройство ввода имеет на корпусе отметки, помогающие использованию устройства.
85. Устройство по п.84, отличающееся тем, что отметки являются определяемыми на ощупь, такие как выпуклые области.
86. Устройство по п.84, отличающееся тем, что отметки могут быть активными и передавать информацию с помощью сигналов пользователю.
87. Устройство по п.27, отличающееся тем, что является устройством связи, например, сотовым телефоном.
88. Устройство по п.27, отличающееся тем, что является средством передвижения, например, автомобилем.
89. Устройство по п.27, отличающееся тем, что является оружием, например, огнестрельным.
90. Устройство по п.27, отличающееся тем, что реагирует на положение более активной части конечности, по меньшей мере, части одного пальца.
91. Устройство по п.27, отличающееся тем, что реагирует на положение менее активной части конечности, по меньшей мере, части одного пальца.
92. Устройство по п.27, отличающееся тем, что реагирует по-разному на разные части конечностей пользователя.
93. Устройство по п.27, отличающееся тем, что реагирует на положение, по меньшей мере, одной ноги.
94. Устройство по п.27, отличающееся тем, что датчики располагаются на других датчиках, таких как активные части управления устройства ввода для определения, каким образом пользователь их использует.
95. Устройство по п.27, отличающееся тем, что датчики находятся в полу для отслеживания, по меньшей мере, нижних конечностей пользователя.
| KR 20000024489 А, 06.05.2000 | |||
| ТРЕХМЕРНЫЙ МИКРОДЖОЙСТИК | 2005 |
|
RU2301439C1 |
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| JP 2005128826 A, 19.05.2005 | |||
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПРОСМОТРА ИНФОРМАЦИИ НА ДИСПЛЕЕ | 2002 |
|
RU2288512C2 |
| СПОСОБ ЛЕЧЕНИЯ И/ИЛИ ПРОФИЛАКТИКИ ИЗБЫТОЧНОЙ МАССЫ ТЕЛА, И/ИЛИ ОЖИРЕНИЯ, И/ИЛИ МЕТАБОЛИЧЕСКИХ НАРУШЕНИЙ | 2008 |
|
RU2403038C2 |

