Область техники:
Изобретение относится к приборостроению, также к машиностроению, в частности к робототехнике, представляет собой систему технических приспособлений, для передачи механических усилий (воздействий) на расстоянии при помощи электрической энергии, через провода, или беспроводным способом.
Цель изобретения: передача механического (мышечного) усилия, для получения тактильного, механического (ощущения, воздействия) от одного человека к другому, на расстоянии, с максимально точным сохранением направления и интенсивности воздействия.
Заявленным изобретением представлены 3 принципиально разных способа передачи механического воздействия:
1. через подвижный рычаг
2. Через изменение кривизны поверхности
3. через движение «механической руки»
Для общения детей и людей с психическими отклонениями, предусмотрены трансляторы упрощенных модификаций, с использованием не только движения, но и с включением и выключением различных функций, например световых и звуковых.
Уровень техники: В доступных источниках информации, аналоги не найдены.
Раскрытие сущности изобретения: устройство для передачи механических воздействий на расстоянии, при помощи электрической энергии (варианты)
Проблема: В настоящее ее время в обществе наблюдается дефицит и голод тактильных и сенсорных ощущений. Особенно сильно это выражено в сфере общения и отношений между людьми.
Люди стали меньше работать руками, ограничиваясь «тыканием», иногда одним-двумя пальцем, по смартфону, в крайнем случае, двумя-четырьмя пальцами по клавиатуре компьютера, ограничивая себя в сенсорных ощущениях от рук. Люди вообще перестали ходить босиком, а домашние полы сделали ровными и мягкими, ограничивая в сенсорных ощущениях от ног. Люди стали укутывать свое тело в большое колличество слоев одежды, ограничивая рецепторы своей кожи в каких бы то ни было ощущениях.
Большое количество людей перестает общаться с себе подобными вообще, оганичиваясь общением с интернетом, или с иллюзиями из интернета. Тактильные контакты с человеком в реальности становятся не модными, неуместными, постыдными.
Даже общительные люди стали чаще общаться через интернет, и реже общаться друг с другом в реальности. А значит, не обнимаясь, не трогая друг друга, не пожимая руки, не хлопая друг друга по плечу, не целуясь, не держа его(ее) руку в своих.
Но психика и психофизиология человека такова, что без подобных тактильных ощущений человек не сможет жить полноценно и гармонично. Природа человека была устроена таким образом, что человеческому телу и психике необходимо получать тактильные ощущения.
Тем не менее, тенденция развития цивилизации и технологического прогресса такова, что наша жизнь все более и более проваливается в интернет, в виртуальность, а значит наше тело и психика все боле и более будут испытывать тактильный голод.
Общение через интернет (на современном уровне развития цифровых технологий) дает качественную картинку и качественный звук, то есть видимую и звуковую часть общений. Но через интернет люди не могут потрогать друг друга.
Для людей определенного типа восприятия - «кинестетиков», ограничения или невозможность тактильных контактов переживаются очень тяжело.
Существуют психологические заболевания и отклонения взрослых и детей, при которых люди не могут напрямую общаться с человеком, ни способны комфортно удерживать зрительный или разговорный контакт. Для таких людей, возможность общаться через осязания или механические воздействия, может помочь жить счастливее или выздороветь.
Иногда люди, имеющие очень близкие нежные отношения друг с другом, по обстоятельствам жизни вынуждены находиться в дали друг от друга, и общаться только через телефонную и интернет связь. Но для них, в силу их отношений, жизненно важны осязательные контакты, и без них они чувствуют себя плохо, а иногда подобная разлука разрушает пары.
Задача: создать систему технических приспособлений для передачи механических воздействий на расстоянии, при помощи электрической энергии, для получения тактильных ощущений и ощущения мышечного напряжения, инициированных конкретным человеком.
Технический результат: Возможность получать тактильные ощущения от механических воздействий, конкретного человека, на расстоянии, через электричество. Утоление тактильного дефицита голода. Насыщение, разнообразие отношений и общения, на расстоянии, через интернет.
Описание изобретения: устройство для передачи механических воздействий на расстоянии, при помощи электрической энергии (варианты)
1. Описание устройства транслятора - «рычаг»
1.1. Заявленное оборудование (далее «транслятор-рычаг») представляет собой механизм, в который подвижным способом встроен механический элемент типа рычаг, имеющий определенные границы свободы в движении. Предполагается что человек, с помощью руки, будет прилагать усилие к данному рычагу, любой силы и направления. Рычаг имеет несколько степеней свободы в движении.
1.1.1. Рычаг может утопать вниз (в глубь) и вытаскиваться наружу (Фиг 1Б, элемент (а)), в определенных границах. В нейтральном положении рычаг занимает среднее положение. (Фиг 1А)
1.1.2. Рычаг можно наклонять в любом направление, на разный угол, в определенных границах. (Фиг 1В, элементы (б) и (в)…). В нейтральном положении рычаг стоит вертикально.
1.1.3. Рычаг можно вращать вокруг его оси, по часовой, или против часовой стрелки, любое количество оборотов (Фиг 1Б, элемент (г)). Для удобства вращения на конце рычага устроены лопасти типа «барашек». (Фиг 1А)
1.2. В оборудовании также установлены датчики и сенсоры, которые фиксирует положение в пространстве, направление и выраженность усилия, приложенные к рычагу.
1.3. В оборудовании также установлены электроприводные механизмы движения (перемещения) рычага, в заданном направлении и заданной силы.
1.4. Транслятор-рычаг(как и все другие виды трансляторов) также оборудован компьютерным блоком, на который установлено специальное программное обеспечение, посредством которого оборудование функционирует.
Функции компьютерного блока может выполнять классический персональный компьютер, с предустановленным на него специальным ПО. В этом случае транслятор и компьютер проводным или беспроводным способом соединены.
Посредством ПО, в частности происходит:
- сбор диагностических данных с датчиков и сенсоров рычага о положении рычага, направлении движения рычага, и сил влияния (давления) на рычаг,
- перевод данных диагностики в электронную форму для передачи информации на расстоянии (проводным или беспроводным способом), а также перевод принятой информации в форму пригодную для передачи команд на элементы движения рычага.
- передача и прием информации о положении рычага и приложенном к нему усилии.
- передача команд на элементы движения рычага, задающие направление и силу давления движения рычага, автоматический контроль исполнения заданных параметров посредством датчиков и сенсоров, коррекция работы элементов движения.
1.5. Принцип работы оборудования («транслятор - рычаг»):
1.5.1. В функциональном процессе учувствуют как минимум два транслятора, находящиеся на удалении друг от друга, соединенные проводным или беспроводным способом, например через интернет.
Допустим человек (А) находится рядом с транслятором (А) и воздействует на рычаг (А), а человек (Б) находится рядом с транслятором (Б) и воздействует на рычаг (Б).
1.5.2. до того как рычагом транслятора начнут манипулировать, рычаг находится в нейтральном (среднем) положении.
а) Человек (А) начинает двигать (рукой) рычагом транслятора в каком-то направлении. Пока в системе (в паре) трансляторов в движении учувствует один человек, движения рычага легки и не требуют принципиальных усилий, поэтому при надавливании на рычаг, человек практически не ощущает ни какого сопротивления.
б) одномоментно, сенсоры транслятора (А) посредством ПО транслятора (А) фиксируют положение рычага (А), и информацию о положении (по системе проводной или беспроводной связи) передают на блок управления транслятор (Б).
в) ПО транслятора (Б), получив информацию о положении рычага (Б), одномоментно подает сигнал механизмам движения рычага (Б) занять положение рычага (Б) принципиально быстро, и принципиально точно в том положении, что находится рычаг (А). Человек (Б) видит, как движется рычаг (Б). Рычаг (Б) движется в точности так, как человек (А) движет рычаг (А). Таким образом, относительно и образно, рычаг (А) и (Б) можно считать одним рычагом. Так как его положение на обоих трансляторах принципиально одинаково.
г) Все происходит одномоментно, максимально одновременно. Вынужденная задержка только в связи со скоростью обработки данных и передачи информации по сети.
Трансляторы имеют направление положения (ориентации), т.е. у транслятора есть сторона, которая обращена к человеку, и сторона, которая обращена от человека. Если оба человека установили трансляторы одинаковой стороной к себе, движения рычага будут восприниматься в одинаковых направлениях, и люди понимают что они находятся от транслятора с одной стороны. Но люди могут находиться с разных, например противоположных сторон транслятора, тогда при движении человеком (А) рычага «от себя», человек (Б) будет наблюдать движение рычага «к себе». На корпусе транслятора все стороны из 4-х указаны графически.
1.5.3. Во время манипуляций человека (А) рычагом (А), присоединяется к процессу манипуляций человек (Б). Человек (Б) берется рукой за рычаг (Б) начинает передвигать его и тянуть в какую-то сторону, с как-то усилием.
а) Естественно, что человек (А) и человек (Б) пытаются переместить рычаг в разных направлениях с разным усилием, но принципиальная особенность системы в том, что положение рычага (Б) в трансляторе (Б), в любой момент времени, должно точно соответствовать положению рычага (А) в трансляторе (А), с какой бы силой и в каком бы направлении люди не воздействовали на рычаг.
б) Таким образом, человек (А) своей рукой манипулирующей рычагом (А), будет чувствовать в точности, направление и силу, механического воздействия руки человека (Б), через рычаг (Б).
в) Кто из пары применит большее усилие, тот и будет влиять на положение рычагов.
1.5.4. Предполагается и рекомендуется, что люди будут манипулировать трансляторами, в процессе видео и аудио трансляции связи между собой. Через видеосвязь люди будут видеть друг друга, видеть трансляторы свой и оппонента, видеть как двигает рычагом оппонент, видеть и чувствовать как двигается свой рычаг.
1.5.5. В процессе механического воздействия друг на друга через транслятор типа «рычаг» могут участвовать, одновременно, любое количество людей (любое количество трансляторов). Система вычисляет среднестатистические значения направлений и усилий всех трансляторов участвующих в процедуре (в сеансе), и придает рычагам всех связанных трансляторов единое положение, и единую траекторию движения.
1.5.6. Так как люди могут прилагать большие усилия, транслятор фиксируется к неподвижному крепкому основанию, и исполняется с запасом прочности элементов, тем не менее при нагрузках близких к «критическим» транслятор подает сигнал, и/или выключается.
2. Описание устройства транслятора - «поверхность»
2.1. Заявленное оборудование (далее «транслятор-поверхность» или «транслятор») представляет собой механизм, состоящий из большого количества отдельных, одинаковых, электроприводных подвижных частей-элементов (далее «подвижные элементы» Фиг 3, эл 8), установленных плотно рядом друг с другом. Верхние подвижные части подвижных элементов (далее: «составные элементы поверхности» Фиг 3 эл 2, Фиг 2 эл 2, Фиг 4 эл 2), своими верхними торцевыми поверхностями, образуют плоскую, относительно ровную поверхность (далее «рабочая поверхность», «поверхность» Фиг 2 эл А, Фиг 3 пункт А эл 1).
2.1.1. Составные элементы поверхности (Фиг 3 эл 2) выполнены в форме цилиндра или (предпочтительнее) шестигранной призмы. Грани призмы (поверхности цилиндра) выполнены с условием минимального трения, поэтому соприкасаясь друг с другом, и образуя этим единый, плотный, устойчивый массив, тем не менее движутся относительно друг друга легко, без затруднений. С рабочего торца (торцы образующие собой рабочую поверхность) поверхность немного скруглена, для избежания резких острых граней на границах между разными элементами, находящихся на разной высоте.
2.1.2. Составные элементы поверхности (подвижные части подвижных элементов) имеют свободу движения только в одном направлении (верх-вниз, перпендикулярно плоскости рабочей поверхности), в определенных границах. В процессе движения (перемещения) составных элементов поверхности, меняется кривизна (геометрия) рабочей поверхности (Фиг 3 пункт Б эл 1). Двигательную функцию подвижных элементов выполняют двигательные элементы (Фиг 3 эл 4), которые посредством тяги (Фиг 2 эл 3) передают двигательный импульс составному элементу поверхности (Фиг 3 эл 2)
2.1.3. Рабочая поверхность с верху (опционально) может быть покрыта, тонкой, резино-подобной пленкой, легко растягивающаяся и легко скользящая, точечно связанная с рабочими торцами элементов (Фиг 3 эл 5).
2.1.4. В нейтральном положении, без механических усилий из вне, поверхность абсолютно ровная (Фиг 2 пункт А). Предполагается, что человек, с помощью руки, или любого другого предмета(Фиг 4 эл 3), будет прилагать усилие на поверхность, любой силы и любого направления, как путем надавливания, так и путем сдвигания (Фиг 4 пункт А).
2.2. В оборудовании также установлены датчики и сенсоры, которые моментально и точно фиксирует положение составных элементов поверхности в пространстве, и выраженность усилия приложенного к нему.
2.3. В подвижных элементах также реализованы электроприводные механизмы движения (перемещения) элементов (Фиг 3 эл 4), в заданном направлении и заданной силы. Таким образом, произойдет изменение кривизны поверхности (Фиг 2 пункт Б, Фиг 4 пункт б)
2.4. Транслятор-«поверхность» (как и все другие виды трансляторов) также оборудован компьютерным блоком, на который установлено специальное программное обеспечение, посредством которого оборудование функционирует.
Функции компьютерного блока может выполнять классический персональный компьютер, с предустановленным на него ПО. В этом случае транслятор и компьютер проводным или беспроводным способом соединены.
Посредством ПО, в частности происходит:
- сбор диагностических данных с датчиков и сенсоров подвижных элементов о положении элементов, направлении движения, силы давления,
- перевод данных диагностики в электронную форму пригодную для передачи информации на расстоянии (проводным или беспроводным способом), а также перевод принятой информации в форму пригодную для передачи команд на подвижные элементы.
- передача и прием информации о положении элементов и приложенных к ним усилий.
- передача команд на элементы движения, задающие направление и силу давления движения составным элементам поверхности, автоматический контроль исполнения заданных параметров посредством датчиков и сенсоров, при необходимости коррекция работы элементов движения.
2.5. Принцип работы оборудования (транслятор - «поверхность»):
2.5.1. В функциональном процессе участвуют, как правило, два транслятора, находящиеся на удалении друг от друга, соединенные проводным или беспроводным способом, например через интернет.
Допустим человек (А) находится рядом с трансляторм (А) и воздействует на поверхность (А), а человек (Б) находится рядом с транслятором (Б) и воздействует на поверхность (Б).
2.5.2. до того как поверхностью транслятора начнут манипулировать, поверхность находится в нейтральном (ровном, гладком) положении.
а) Человек (А) начинает воздействовать, например, давить, например ладонью на поверхность транслятора, например без сдвигания в сторону, просто надавил. Пока в системе (в паре) трансляторов в движении учувствует один человек, движения поверхности легки и не требуют принципиальных усилий, поэтому при надавливании на поверхность, человек почти не ощущает ни какого сопротивления.
б) одномоментно, сенсоры транслятора (А) посредством ПО транслатора (А) фиксируют положение подвижных лементов (А), и информацию о положении (по системе проводной или беспроводной связи) передают на блок управления транслятор (Б).
в) программное обеспечение (ПО) транслятора (Б), получив информацию о положении подвижных элементов (А), одномоментно подает сигнал механизмам движения элементов (Б) занять положение элементов (Б) принципиально быстро, и принципиально точно в том положении, что находится элемент (А). Человек (Б) видит как меняется кривизна поверхности (Б) (Фиг 2 пункт Б). Кривизна поверхности (Б) меняется в точности так, как человек (А) меняет кривизну поверхности (А). Таким образом, относительно и образно, поверхность (А) и (Б) можно считать одной поверхностью. Так как ее кривизна на обоих трансляторах принципиально одинакова.
г) Все происходит одномоментно, максимально одновременно. Вынужденная задержка только в связи со скоростью обработки данных и передачи информации по сети.
Трансляторы имеют направление положения (ориентации), т.е. у транслятора есть сторона, которая обращена к человеку, и сторона, которая обращена от человека. Если оба человека установили трансляторы одинаковой стороной к себе, изменение кривизны поверхности будут восприниматься в одинаковых направлениях, и люди понимают, что они находятся от транслятора с одной стороны. Но люди могут находиться с разных, например противоположных сторон транслятора, тогда при надавливании ладонью на поверхность транслятора человеком (А) пальцами от себя, человек (Б) будет наблюдать слепок ладони пальцами к себе. На корпусе транслятора все стороны из 4-х указаны графически.
В описанном примере с отпечатком ладони, используются настройки, которые приводят к тому, что человек (А) надавливает на поверхность, производя впадину, отпечаток, но человек (Б) видит не впадину (отпечаток) а оббьем (слепок) самой ладони. Таким образом, человек (Б) может наблюдать и потрогать, не вмятину, а аналог (живой слиток) самой ладони.
2.5.3. Во время манипуляций человека (А) поверхностью (А), присоединяется к процессу манипуляций человек (Б). Человек (Б) давит своей ладонью на поверхность (Б), которая к этому моменту уже не ровная, а представляет собой выступающую с уровня поверхности точную копию ладони человека (А). Человек (Б) начинает передвигать и надавливать своей рукой, с как-то усилием, воздействия на руку человека (А).
а) естественно, что человек (А) и человек (Б) пытаются одновременно изменить кривизну поверхности в разных направлениях с разным усилием, но принципиальная особенность системы в том, что кривизна поверхности (Б) в трансляторе (Б), в любой момент времени, должно точно соответствовать кривизнге поверхности (А) в трансляторе (А), с какой бы силой и в каком бы напралдении люди не воздействовали на поверхность.
б) таким образом, человек (А) своей рукой влияющей на поверхность (А), будет чувствовать в точности, направление и силу, механического воздействия руки человека (Б), через поверхность (Б).
в) таким образом, можно утверждать, что люди будут чувствовать руки друг друга, и чем более сильно они будут влиять на кривизну поверхности, тем более отчетливо они будут чувствовать прикосновения.
2.5.4. Предполагается и рекомендуется, что люди будут манипулировать трансляторами, в процессе видео- и аудио- трансляции связи между собой. Через видеосвязь люди будут видеть друг друга, видеть трансляторы свой и оппонента, видеть как влияет оппонент на поверхность, видеть и чувствовать как двигается (меняется) своя поверхность.
2.5.5. В процессе механического воздействия друг на друга через транслятор типа «поверхность» могут участвовать, одновременно, несколько человек (несколько трансляторов). Но перед сеансом должны быть распределены роли: чьи вдавливания и на чьем конце должны проецироваться как выпуклости, а чьи вдавливания, должны проецироваться как вдавливания.
Система вычисляет среднестатистические значения направлений и усилий всех трансляторов участвующих в процедуре (в сеансе), и придает поверхности всех связанных трансляторов единую кривизну в статике и в движении. В этом случае все люди будут чувствовать всех участников.
2.5.6. Так как люди могут прилагать большие усилия, транслятор фиксируется к неподвижному крепкому основанию, и исполняется с запасом прочности элементов, тем не менее, при нагрузках близких к «критическим» транслятор подает сигнал, и/или выключается.
2.5.7. В связи с тем, что на транслятор могут подавать проекцию лица, для удобства, на подвижных шарнирах транслятор может ориентироваться из положения параллельно горизонтали в положение параллельно вертикали.
2.5.8. В случае проектирования лица, в целях безопасности, в программу встроена защитная функция: в случае проекции лица (которая программой распознается), блокируются резкие и глубокие нажатия в область глаз. Если подробное движение будет инициировано, программа не воспроизведет их, но предупредит пользователя, который подвергся нападению, заблокирует злоумышленника, и перешлет отчет о происшествии единый центр продажи товара (услуги).
2.5.9. Перед использованием в программном блоке выбирается способ реакции, можно выбрать «одинаковую реакцию», когда на вогнутость появится точно такая же вогнутость. Можно выбрать «обратную реакцию», когда на вогнутость появляется выпуклость, а на выпуклость появляется вогнутость.
3. Описание устройства транслятора - «механическая рука»
3.1. Заявленное оборудование (далее транслятор-«рука» или «транслятор») представляет собой механизм, состоящий из платформы с установленной на ней двух механических, разных по функциям, аналогов руки.
3.1.1. первый аналог руки, это устройство типа «перчатка» (Фиг 5,6 эл 1a, 1б), в которую пользователь всовывает руку. Перчатка на этапе настройки имеет свойство подстраиваться под размер руки пользователя. В свою очередь, размеры подвижного сочленения, на котором крепится перчатка (Фиг 5,6 эл 2а, 26), подстраиваются под размеры предплечья и плеча пользователя. Перчатка охватывает предплечье пользователя, до локтевого состава.
Одна из задач перчатки: фиксировать любые движения руки, кисти и пальцев пользователя, на чью руку она одета, во всех суставах. Для этой цели в перчатку вмонтированы множества датчиков и сенсоров.
Шарниры движения в элементах перчатки активны, электроприводные, что означает, что не только человеческая рука может двигать элементами перчатки, но и перчатка может двигать человеческой рукой (в границах нормальной физиологии суставов). Это вторая задача перчатки.
Третья задача перчатки: передавать на руку пользователя тактильные ощущения по всей поверхности соприкосания перчатки с рукой пользователя (от кончиков пальцев до локтя). Для этой цели во внутреннюю поверхность перчатки вмонтированы механические раздражители (далее тактильные раздражители), электроприводные, которые максимально приближено, имитируют механические прикосновения кожи.
По одному из вариантов реализации, перчатка монтирована на шарнирных штангах, активных, с электроприводом, на платформе (Фиг 6, 6 эл 2а, 2б), назовем ее «стационарная перчатка».
По другому варианту перчатка не установлена на платформе, но имеет технологию определения точной ориентации всех элементов перчатки в пространстве. Соединена с системой проводным или беспроводным способом.
Перчатка (для правшей) находится с права от пользователя, ориентирована ОТ пользователя (пальцами от пользователя, отверстием на пользователя), и предназначена для того чтобы ее одевал, и ею манипулировал сам пользователь.
Перчаткой своего транслятора (Фиг 5 эл 1а) пользователь управляет механической рукой оппонента по сессии (Фиг 5 эл 3б).
3.1.2. второй аналог, это собственно «механическая рука» далее «манипулятор» (Фиг 5,6, эл 3а, 3б), которая жестко, но подвижно, на подвижных шарнирах (Фиг 5,6, эл 4а, 4б) фиксирована на платформе. Шарниры в движениях всех элементах манипулятора активны, рука, кисть и пальцы, активно движутся в суставах, движением руки управляет программа.
Особенностью манипулятора является способность считывать напряжение (силу) механического сопротивления движению руки. То есть если рука наткнулась на препятствие, программа понимает, с какой силой это препятствие давит на руку.
Другой особенностью манипулятора является размещение по ее поверхности тактильных сенсоров, которые реагируют на соприкосновение.
Механическая рука (Фиг 5,6 эл 3а, 3б) находится с лева от пользователя, и направлена на пользователя. Механическая рука транслятора пользователя предназначена, чтобы воздействовать на самого пользователя. Механической рукой своего транслятора (Фиг 5,6 3а) пользователь не управляет, ей управляет оппонент по сессии, через свою перчатку (Фиг 5,6 эл 1б).
Поверхность механической руки изготавливается максимально приближенно к осязательным качествам живой руки человека. Принимая во внимание и текстуру кожи, и температуру тела. От кончиков пальцев до локтя.
3.2. И в перчатке и в манипуляторе установлены датчики и сенсоры, которые определяют положение их в пространстве, положение элементов перчатки и механической руки относительно друг друга, выраженность механического усилии приложенного к подвижному элементу.
3.3. В подвижных элементах (в суставах) также реализованы электроприводные механизмы движения (перемещения) элементов, в заданном направлении и заданной силы.
3.4. Транслятор-«механическая рука» (как и все другие виды трансляторов) также оборудован компьютерным блоком, на который установлено специальное программное обеспечение, посредством которого оборудование функционирует.
Функции компьютерного блока может выполнять классический персональный компьютер, с предустановленным на него ПО. В этом случае транслятор и компьютер проводным или беспроводным способом соединены.
Посредством работы ПО, сенсоров, датчиков, элементов движения и тактильных раздражителей, происходит следующие действия:
3.4.1. снятие данных с датчиков перчатки субъекта,
3.4.2. персылка снятой информации о движении перчатки на ПО объекта
3.4.3. на ПО объекта движение манипулятора согласно присланной информации, принципиальная задача системы сделать движение перчатки и манипулятора абсолютно синхронными
3.4.4. на ПО объекта снятие информации с тактильных сенсоров механической руки
3.4.5. передача данных тактильных сенсоров на ПО субъекта
3.4.6. на основании данных с тактильных сенсоров, срабатывают тактильные раздражители перчатки субъекта.
Все происходит одновременно.
Внешняя поверхность механической руки (от кончиков пальцев до локтя), содержащая тактильные сенсоры (аналог тактильных рецепторов), зонально полностью соответствует внутренней поверхности перчатки с расположенными на ней тактильными раздражителями. Поэтому тактильные раздражители в перчатке воздействуют на руку субъекта точно в том месте и в то мгновение, в какой момент и каким местом, механическая рука на стороне объекта коснулась объекта.
3.5. Принцип работы оборудования (транслятор - «механическая рука»):
В сессии участвуют только 2 человека, один человек (субъект) который действует механически действует на другого (на объект). Так как в описанном наборе оборудования у обоих людей присутствует и перчатка и манипулятор, оба могут быть одновременно и субъектами и объектами (Фиг 6).
Оба человека сидят перед компьютером, на онлайн видеосвязи и видят друг друга в монитор, таким образом сидят лицом друг другу. Перед монитором (у каждого) установлен транслятор, на котором с правой стороны перчатка (Фиг 6 эл 1а, 1б) с левой стороны механическая рука (Фиг 6 эл 3а, 3б).
3.5.1. Человек (А) как субъект одевает на руку перчатку (А) своего транслятора (А), перчатка (А) автоматически подстраивается под размер руки субъекта, на основании этих данный механическая рука (Б) на стороне транслятора (Б) автоматически подстраивается под размер руки субъекта (А). Перчатка работает как «транслятор влияния» Фиг 6.
3.5.2. Все движения перчатки (А), посредством сенсоров и датчиков снимаются и одномоментно пересылаются на блок управления (Б) человека (Б) объекта, где управляет манипулятором (Б), делая ее движения полностью синхронными с перчаткой (А). Механическая рука (манипулятор) работает как транслятор реакции Фиг 6.
3.5.3. Таким образом, субъект (А) управляя манипулятором (Б) сможет трогать абсолютно все, до чего дотянется манипулятор (Б). Человек (А) субъект, видит через монитор, как по ту сторону монитора, по его команде, движется манипулятор (Б) Фиг 5,6.
3.5.4. В случае если механическая рука (Б) что-то затрагивает и задевает частью себя на которой расположены тактильные сенсоры, мгновенно тактильные раздражители перчатки (А) создают живой руке субъекта (А) эффект прикосновения
3.5.5. В тот момент когда человек (Б) (который до сих пор был объектом) захочет тоже что-то потрогать, он становится в том числе субъектом, а тот кого он будет потрогать (человек А), станет в том числе его объектом.
3.5.6. Таким образом, человека (А) (Фиг 6 пользователь А), одев перчатку (А) (Фиг 6, эл 1а), через манипулятор (Б) (Фиг 6, эл 3б), трогает человека (Б) (Фиг 6, пользователь б),
а человек (Б) (Фиг 6, пользователь б), с помощью перчатки (Б) (Фиг 6, эл 1б), через миангипулятор (А) (Фиг 6, эл 3а), трогает человека (А) (Фиг 6 пользователь А).
Причем оба человека не только чувствуют, что их трогают, но и чувствуют, как они трогают, кончиками пальцев или другими частями руки (в перчатке) Фиг 6.
3.5.6. Возможно использование очков виртуальной реальности, при использовании которых люди смогут тактильно контактировать друг с другом, видя себя не через монитор, а рядом в виртуально реальности, в которой не будет ни перчаток, ни механических рук.
3.5.7. Так как люди могут прилагать большие усилия, транслятор фиксируется к неподвижному крепкому основанию, и исполняется с запасом прочности элементов, тем не менее, при нагрузках близких к «критическим» транслятор подает сигнал, и/или выключается.
3.5.8. В связи с тем, что рядом с ранимым человеком находится механическая рука, программой предусмотрены защитные режимы и настройки, не позволяющие нанести вред человеку. Лицо объекта сканируется и движения механической руки возле лица, контролируются программой, блокируя резкие сильные движения, способные навредить. Если подробное движение будет инициировано, программа не воспроизведет их, но предупредит пользователя который подвергся нападению, заблокирует злоумышленника, и перешлет отчет о происшествии единый центр продажи товара (услуги).
Краткое описание чертежей изобретения:
устройство для передачи механических воздействий на расстоянии, при помощи электрической энергии (варианты)).
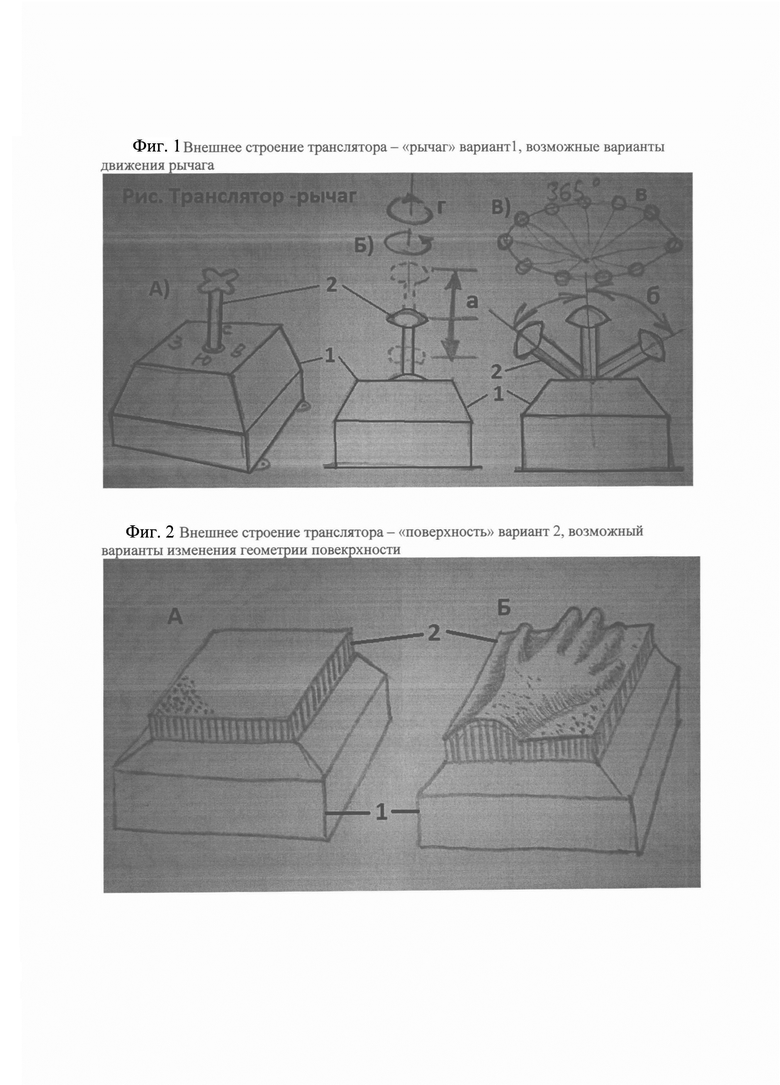
Фиг 1: Внешнее строение транслятора - «рычаг», возможные варианты движения рычага.
А) транслятор с нейтральным (средним) положении рычага, на корпусе транслятора обозначены стороны для ориентации.
Б) транслятор со схематично показанной возможностью вдавливать и вытаскивать рычаг (элемент а), а также вращать рычаг вокруг его продольной оси (элемент г)
Б) транслятор с схематично показанной возможностью наклонять рычаг в разные стороны, на разный угол (элемент 6), а также вращать наклоненный рычаг вокруг оси корпуса (элемент в)
1 - корпус транслятора
2 - рычаг транслятора
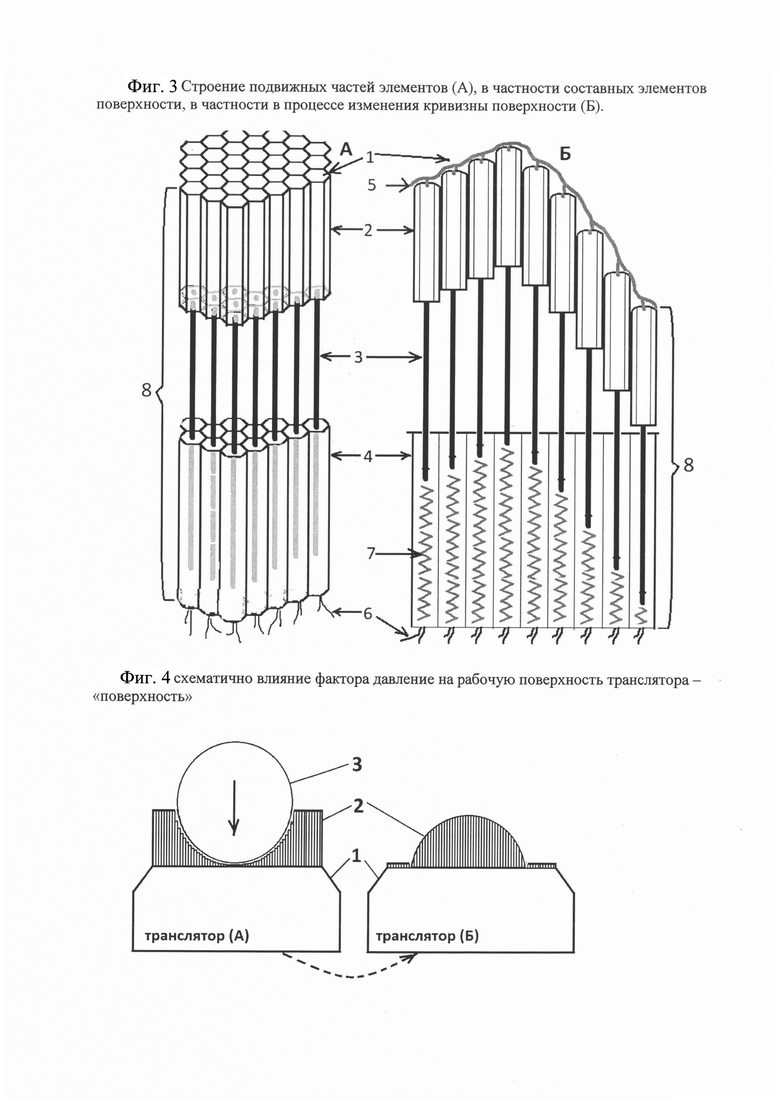
Фиг 2 Внешнее строение транслятора - «поверхность», возможный варианты изменения геометрии повекрхности.
1 - корпус транслятора
2. рабочая (активная) поверхность транслятора.
(А) рабочая поверхность транслятора в нейтральном (среднем) состоянии до «влияния» или «реакции». (Б) примерный вид реакции рабочей поверхности на вдавливание ладони на стороне «влияния».
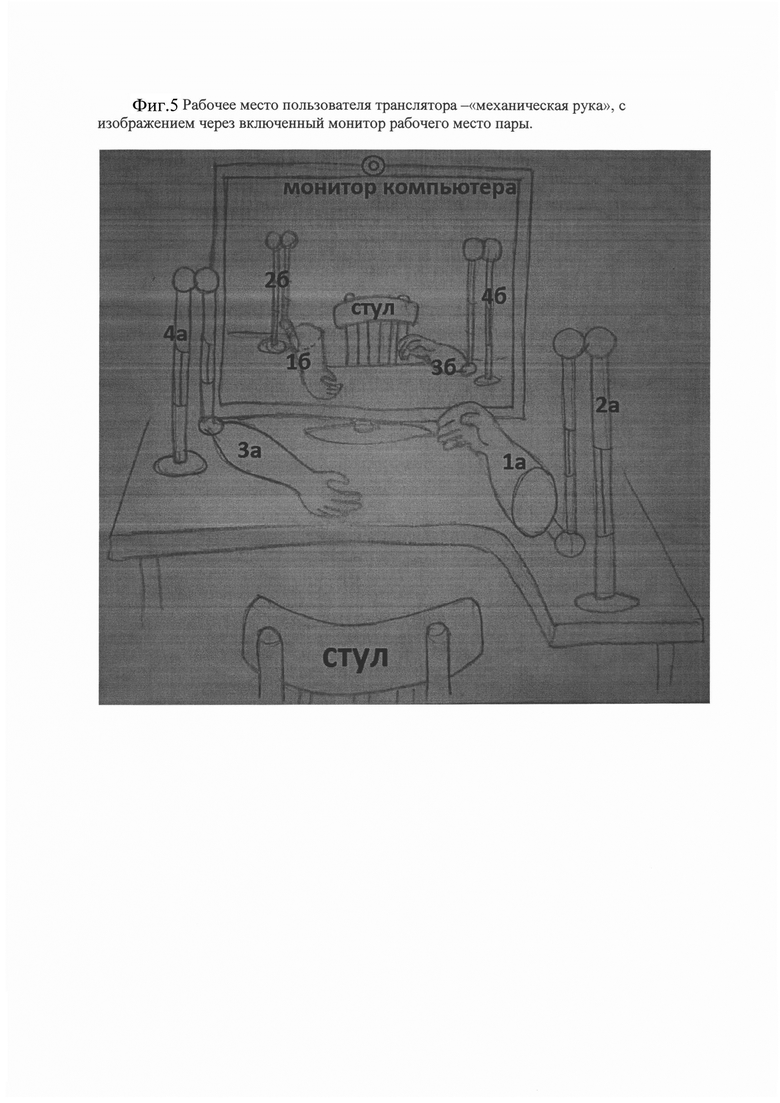
Фиг 3. Строение подвижных частей элементов, в частности составных элементов поверхности в нейтральном положении (А), в процессе изменения кривизны поверхности (Б).
Вариант А: положение элементов поверхности в нейтральном (среднем) состоянии поверхности, когда она ровная. Собственно подвижный элемент (элемент 8), состоит из составного элемента поверхности (эл 2). Все составные элементы поверхности, своими верхними торцевыми поверхностями, образуют рабочую поверхность транслятора (эл 1). Если составные элементы поверхности выделаны в виде правильных шестиугольных призм, между элементами не остаются щели и отверстия, (эл 3) - «тяга» жесткий штыреобразный элемнт (в некоторых вариантах реализации относительно гибкий), предназначен для передачи двигательного импульса от двигательного элемента (эл 4) к составному элемента поверхности (эл 2). Двигательный элемент (4) имеет механизм движения (7) и подключенные к нему провода (6) посредством которых к двигателю подводится электроэнергия, из системы подается информация о задаче на движение, в систему отправляется информация от датчиков сенсоров о положении составного элемента поверхности, и усилии приложенному к нему.
Вариант (Б): поверхность (1) в состоянии деформации, составные элементы поверхности (2) находятся на разном уровне. К верхним рабочим поверхностям составных элементов поверхности приложена и зафиксирована оболочка (5). Механизм, реализующий движение элементов (7), находится в разном состоянии, у разных элементов движения, (находящихся на разной высоте).
Фиг 4: схематично влияние фактора давление на рабочую поверхность транслятора - «поверхность».
А) транслятор на стороне «влияния», на активной поверхности лежит шар, прогибая поверхность в шарообразную вогнутость.
Б) транслятор на стороне «реакции», на активной поверхности наблюдаем шарообразную выпуклость, аналогичную вогнутости на стороне «влияния».
1 - корпус транслятора
2 - рабочая (активная) поверхность транслятора. На «трансляторе влияния» (А) видна вогнутость под форму влияющего предмета, на «трансляторе реакции» (Б) видна выпуклось по форме вогнутости транслятора (А).
Перед использованием в программном блоке выбирается способ реакции, можно выбрать одинаковую реакцию, когда на вогнутость появится точно такая же вогнутость, можно выбрать обратную реакцию, когда на вогнутость появляется выпуклость, а на выпуклость появляется вогнутость.
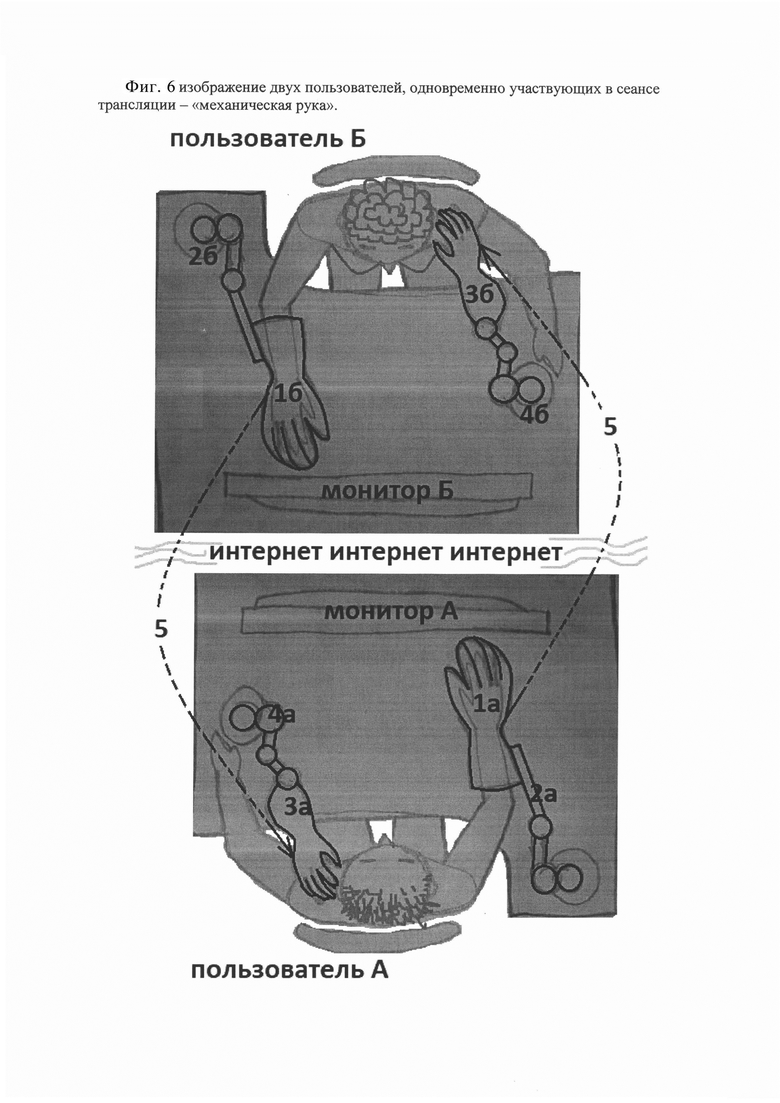
Фиг 5: Рабочее место пользователя транслятора - «механическая рука», с изображением через включенный монитор рабочего место пары.
Показано рабочее место пользователя транслятором «механическая рука» пользователь (А). Монитор включен, в монитор видим рабочее место второго участника сессии трансляции «механическая рука»: пользователя (Б).
Рабочее место пользователя (А), мы его видим со стороны спины:
С права: перчатка (элемент 1а) пользователя (А), она фиксирована на подвижном сочлинении (2а) приближенном по расположению, размерам и функциям к человеческой руки от плеча до кончиков пальцев. Перчатка направлена пальцами от пользователя (А), так как он будет ее одевать.
С лева механическая рука, он же манипулятор (3а), она направлена пальцами в сторону пользователя (А), так как она предназначена для манипуляций пользователем (Б) на пользователя (А). Манипулятор 3 а установлен на подвижном сочлинении 4а, приближенном по расположению, размерам и функциям к человеческой руки от плеча до кончиков пальцев.
Рабочее место пользователя (Б), мы его видим через монитор, и со стороны лица.
1б - перчатка пользователя (Б), 2б - подвижное сочленение для устройства перчатки пользователя (Б). 3б - манипулятор пользователя (Б), 4б - подвижное сочленение для устройства манипулятора пользователя (Б)
Фиг 6. изображение двух пользователей, одновременно участвующих в сеансе трансляции - «механическая рука».
Изображение двух рабочих мест, с двумя равными людьми (вид с верх). Графически они расположены рядом, но в реальности она находятся далеко друг от друга, и их рабочие места соединены программой транслятора через интернет.
Робочее место (А) пользователя (А) (расположен в нижней части Рисунка. Рука пользователя А вдета в перчатку 1а, установленной на подвижном сочленении 2а, Все движения перчатки 1а, и сочленения 2а, программой транслятора передаются на робочее место Б, пользователя Б, и мгновенно и точно управляют движениями механической руки (манипулятор) 3б, установленной на подвижном сочленении 4б, данная связь показана элементом 5.
В свою очередь пользователь Б на рабочем месте Б, всунул свою руку в перчатку 1б, установленной на подвижном сочленении 2б, Все движения перчатки 1б и сочлинения 2б, программой транслятора передаются на рабочее место А, пользователя А, и мгновенно и точно управляют движениями механической руки (манипулятор) 3а, установленной на подвижном сочленении 4а, данная связь показана элементом 5
Оба пользователя манипулируют правой рукой, поэтому и сами подвергаются воздействию от манипулятора правой руки.
Осуществление изобретения:
устройство для передачи механических воздействий на расстоянии, при помощи электрической энергии (варианты).
Все элементы системы транслятора- «рычаг» проектируются и реализуются с использованием технологий и способов и решений, известных и используемых в современном уровне техники, в том числе в отраслях робототехники и космической.
Почти все элементы системы транслятора- плоскость проектируются и реализуются с использованием технологий и способов и решений, известных и используемых в современном уровне техники, в том числе в отраслях робототехники и нано-технологий. Требуется небольшая доработка в части реализации (более мощной, чем существует ныне) двигательной функции подвижных составляющих элементов плоскости, в масштабах микроразмеров.
Все элементы системы транслятора - «механическая рука» проектируются и реализуются с использованием технологий и способов и решений, известных и используемых в современном уровне техники, главным образом в робототехнике. Требуется небольшая доработка в части реализации «тактильных раздражителей».
Устройство для передачи механических воздействий на расстоянии, при помощи электрической энергии (варианты), предназначено для того, чтобы люди, находившиеся вдали друг от друга, посредством устройства и проводной или беспроводной связи, могли влиять друг на друга механически и причинять друг другу тактильные ощущения. В первом варианте, устройство для передачи механических воздействий на расстоянии, при помощи электрической энергии, состоит из корпуса и элемента в виде рычага, подвижно установленного на корпус, комплекса сенсорных датчиков системы элементов крепления и движения рычага, комплекса электроприводных элементов движения рычага, а также программного комплекса для управления работы устройством. Во втором варианте, устройство для передачи механических воздействий на расстоянии, при помощи электрической энергии, состоит из корпуса и комплекса, одинаковых, подвижно установленных элементов, размещенных плотно друг к другу, верхними торцевыми гранями образующие плоскую поверхность, являясь составными элементами рабочей поверхности, комплекса сенсорных датчиков системы элементов крепления и движения составных элементов поверхности, комплекса электроприводных элементов движения составных элементов поверхности, а также программного комплекса для управления работы устройством. В третьем варианте, устройство для передачи механических воздействий на расстоянии, при помощи электрической энергии, состоит из корпуса и двух подвижно установленных на него элементов: в виде перчатки и в виде механической руки или манипулятора, комплекса сенсорных датчиков системы элементов перчатки и манипулятора, комплекса механизмов тактильных раздражителей, на внутренней стороне перчатки, комплекса электроприводных элементов движения перчатки и манипулятора, программного комплекса для управления работы устройством. Таким образом, с помощью устройства, снабжённого подвижно установленным на корпусе рычагом или комплексом одинаковых, подвижно установленных элементов, размещенных плотно друг к другу, верхними торцевыми гранями образующими плоскую поверхность, или перчаткой и манипулятором, и проводной или беспроводной связи, люди, находящиеся вдали друг от друга, могут влиять друг на друга механически и причинять друг другу тактильные ощущения. 3 н.п. ф-лы, 6 ил.
1. Устройство для передачи механических воздействий на расстоянии, при помощи электрической энергии, состоящее из:
- корпуса и элемента в виде рычага, подвижно установленного на корпус;
- комплекса сенсорных датчиков системы элементов крепления и движения рычага;
- комплекса электроприводных элементов движения рычага;
- программного комплекса для управления работы устройством;
причём рычагом можно свободно, без усилий, двигать рукой в разных направлениях, в том числе наклонять, в том числе утапливать в корпус, в том числе вращать в любых направлениях вокруг оси рычага,
причём сенсорные датчики системы крепления рычага фиксируют положение рычага и усилие, приложенное к нему, и передают информацию в программный комплекс,
причём элементы движения рычага, по команде программного комплекса, способны перемещать рычаг в заданное положение, в заданном направлении, по заданной траектории, с заданным усилием,
причём программный комплекс устройства, в рамках заданной электронной программы, собирает и обрабатывает информацию с сенсорных датчиков устройства, передаёт информацию проводным или беспроводным способом на другие устройства, принимает информацию с других устройств, задаёт параметры движения рычага, через управление комплексом элементов движения рычага,
причём участники процесса влияют друг на друга механически, причиняя друг другу сенсорные ощущения, через совместное активное влияние на движение рычага.
2. Устройство для передачи механических воздействий на расстоянии, при помощи электрической энергии, состоящее из:
- корпуса и комплекса, одинаковых, подвижно установленных элементов, размещенных плотно друг к другу, верхними торцевыми гранями образующими плоскую поверхность, являясь составными элементами рабочей поверхности;
- комплекса сенсорных датчиков системы элементов крепления и движения составных элементов поверхности;
- комплекса электроприводных элементов движения составных элементов поверхности;
- программного комплекса для управления работы устройством;
причём составные элементы, образующие поверхность, свободно перемещаются вдоль собственной оси в двух направления верх/вниз, вследствие перемещения меняя кривизну поверхности,
причём на поверхность можно свободно, без усилий, механически воздействовать, надавливать, меняя кривизну поверхности,
причём сенсорные датчики системы крепления и движения составных элементов поверхности, фиксируют положение каждого элемента в отдельности и усилие, приложенное к ним, и передают информацию в программный комплекс,
причём элементы движения составных элементов поверхности, по команде программного комплекса, способны перемещать составные элементы, каждый в отдельности, в заданное положение, с заданным усилием, тем самым меняя кривизну поверхности,
причём программный комплекс устройства, в рамках заданной электронной программы, собирает и обрабатывает информацию с сенсорных датчиков устройства, передаёт информацию проводным или беспроводным способом на другие устройства, принимает информацию с других устройств, задаёт параметры движения составных элементов через управление комплексом элементов движения составных элементов поверхности,
причём участники процесса влияют друг на друга механически, причиняя друг другу сенсорные ощущения, через совместное активное изменение кривизны рабочей поверхности.
3. Устройство для передачи механических воздействий на расстоянии, при помощи электрической энергии, состоящее из:
- корпуса и двух подвижно установленных на него элементов: в виде перчатки и в виде механической руки или манипулятора;
- комплекса сенсорных датчиков системы элементов перчатки и манипулятора;
- комплекса механизмов тактильных раздражителей, на внутренней стороне перчатки;
- комплекса электроприводных элементов движения перчатки и манипулятора;
- программного комплекса для управления работы устройством;
причём перчатка состоит из отдельных, подвижно сочлененных составных частей, позволяющих руке, одетой в перчатку, двигаться во всех суставах, в пределах физиологической нормы суставов, без усилий,
причём сенсорные датчики перчатки фиксируют положение перчатки, положение элементов перчатки, положение частей руки и усилие, приложенное к этому положению, и передают информацию в программный комплекс,
причём элементы движения элементов перчатки, по команде программного комплекса, способны перемещать, сдвигать элементы перчатки в заданное положение, с заданным усилием,
причём элементы тактильных раздражителей внутренней поверхности перчатки, по команде программного комплекса, способны воспроизводить раздражающие действия, в заданное время, в заданном месте, с заданным усилием,
причём манипулятор или механическая рука, состоит из отдельных, подвижно сочленённых составных частей, соответствует нормальным среднестатистическим размерам руки, с возможностью движения во всех суставах в пределах физиологической нормы,
причём сенсорные датчики манипулятора фиксируют положение манипулятора, положение элементов манипулятора и усилие, приложенное к этому положению, а тактильные сенсоры манипулятора фиксируют место и силу прикосновения и передают информацию в программный комплекс,
причём элементы движения составляющих частей манипулятора, по команде программного комплекса, способны изменять положение манипулятора и его частей, в заданное положение, в заданном направлении, по заданной траектории, с заданным усилием,
причём программный комплекс устройства, в рамках заданной электронной программы, собирает и обрабатывает информацию с сенсорных и тактильных датчиков устройства, передает информацию проводным или беспроводным способом на другие устройства, принимает информацию с других устройств, задает параметры движения элементов устройства, через управление комплексом элементов движения перчатки и манипулятора,
причём субъект механического влияния, с целью причинения сенсорных ощущений, пользуется перчаткой собственного устройства, транслятора и воздействует механически на объект, посредством манипулятора на стороне объекта, при этом программа системы устройств программирует и реализует движение манипулятора на стороне объекта, в заданное время, в заданном направлении, и с заданным усилием, в соответствии с движениями перчатки на стороне субъекта, причём сам субъект получает тактильные ощущения от прикосновения с объектом, посредством тактильных раздражителей на внутренней стороне перчатки.
| US 4473725 A, 25.09.1984 | |||
| US 10150223 B2, 11.12.2018 | |||
| US 20080193260 A1, 14.08.2008 | |||
| JP 4456434 B2, 28.04.2010 | |||
| JP 5448427 B2, 19.03.2014 | |||
| US 6209380 B1, 03.04.2001 | |||
| US 20190184576 A1, 20.06.2019 | |||
| US 6413229 B1, 02.07.2002 | |||
| US 5845540 A, 08.12.1998 | |||
| DE 102012002786 B4, 01.06.2017 | |||
| УСТРОЙСТВО И СПОСОБ ИМИТАЦИИ И ПЕРЕДАЧИ КОНТАКТНЫХ ЭКСТЕРОЦЕПТИВНЫХ ОЩУЩЕНИЙ | 2017 |
|
RU2708949C2 |

