Настоящее изобретение относится к электродвигателям. Более конкретно настоящее изобретение относится к схеме определения режима работы электродвигателя и соответствующему способу, а также к клапану и летательному аппарату, в котором используется такая схема.
Современные электродвигатели являются широко используемыми электромеханическими преобразователями электрического тока в механическую силу. Их действие, как правило, основывается на физическом явлении электромагнитных сил. Электрический ток создает магнитное поле, которое может воздействовать на другое магнитное поле, находящееся рядом с проходящим электрическим током. Поэтому электрический ток может использоваться для вращения магнитного ротора электродвигателя и вала, который соединен с ротором.
С другой стороны, изменяющееся магнитное поле создает напряжение в проводнике, которое находится рядом с этим полем. Это напряжение известно как противоэлектродвижущая сила или противоЭДС. В настоящем описании для обозначения этой электродвижущей силы используется термин "противоэлектродвижущая сила".
Шаговый двигатель является специальным видом электродвигателей. В большинстве случаев он имеет ряд обмоток, являющихся частью статора и воздействующих на ротор, который может быть выполнен из постоянного магнита. Достоинством шагового двигателя является использование нескольких обмоток статора, что позволяет осуществлять точное позиционирование. Для шагового двигателя необходимо устройство управления, которое осуществляет управление обмотками статора. Устройство управления шагового двигателя может задавать направление его вращения путем управляемого запитывания его различных обмоток в последовательности, соответствующей направлению вращения. Устройства управления также способны управлять скоростью вращения шаговых электродвигателей.
Шаговые электродвигатели могут использоваться в самых различных применениях, в которых требуется управляемая механическая сила, и могут использоваться, например, для управления вентилем системы кондиционирования воздуха на летательном аппарате. Необходимо определять положение клапана для того, чтобы направлять соответствующие управляющие сигналы в электродвигатель для управления проходным сечением вентиля. Поэтому в большинстве случаев необходимы дополнительные датчики для определения положения вентиля. Использование таких дополнительных датчиков означает дополнительный вес, что для летательных аппаратов является существенным недостатком.
Другим вариантом определения положения вентиля может быть идентификация режима работы электродвигателя, используемого для привода вентиля. В этом случае термин "режим работы" означает, что, определяя, вращается или нет шаговый электродвигатель, и, учитывая длительность его вращения, можно определить положение, в котором находится вентиль.
Целью настоящего изобретения является создание улучшенной электронной схемы для определения режима работы электродвигателя.
В соответствии с вариантом осуществления настоящего изобретения, указанным в пункте 1 его формулы, вышеуказанная цель может быть достигнута с помощью схемы определения режима работы электродвигателя, которая содержит датчик и блок определения режима работы, причем датчик является частью электродвигателя. Блок определения режима работы предназначен для определения режима работы электродвигателя, который является либо режимом вращения, либо режимом фиксации (запирания).
Предпочтительно, схема должна обеспечивать определение текущего состояния электродвигателя. Таким образом, можно будет определить, находится ли электродвигатель в состоянии вращения или он зафиксирован. Если вал электродвигателя не заблокирован каким-либо посторонним предметом, вал может поворачиваться в соответствии с сигналами управления, которые поступают в электродвигатель из устройства управления. Если же вал зафиксирован, то электродвигатель может выдавать сигнал о том, что в текущий момент вал по какой-то причине заблокирован. Анализ режима работы электродвигателя может обеспечивать возможность для устройства управления реагировать соответствующим образом.
Датчик, который является частью электродвигателя, обладает тем достоинством, что позволяет снизить вес по сравнению с устройствами, в которых для определения режима работы электродвигателя используется дополнительный элемент. Так, датчик, встроенный в электродвигатель, мог бы обеспечить снижение веса летательного аппарата, в котором используется предлагаемая в изобретении схема.
Датчик может содержать дополнительно катушку, которая выполнена так, что при вращении ротора электродвигателя в катушке индуцируется противоэлектродвижущая сила.
Индуцирование в катушке противоэлектродвижущей силы является сигналом обратной связи двигателя в отношении фактического режима работы. Если электродвигатель вращается, то ротор поворачивается, и индуцируется противоэлектродвижущая сила. Этот вид обратной связи можно назвать преобразованием механической величины в электронный сигнал. Такое преобразование в электронный сигнал создает возможность для использования электронной схемы с целью анализа фактического режима работы.
В качестве катушки может использоваться обмотка статора электродвигателя. Использование обмотки статора электродвигателя в качестве катушки позволяет использовать в качестве датчика часть двигателя. Таким образом, можно получать сигнал обратной связи из электродвигателя без необходимости использования дополнительных элементов для реализации такой обратной связи.
Схема может содержать дополнительно дифференциальный усилитель. Дифференциальный усилитель содержит первый и второй входы, причем на первый вход подается напряжение питания, а второй вход соединен с катушкой.
Дифференциальный усилитель выполняет операцию вычитания двух входных напряжений, и на его выход передается сигнал, представляющий разницу входных напряжений. Таким образом, обеспечивается возможность сравнения двух сигналов по их разности.
Дифференциальный усилитель имеет первый выход и приспособлен для того, чтобы вырабатывать на этом первом выходе первый разностный сигнал или второй разностный сигнал. Когда электродвигатель вращается, дифференциальный усилитель вырабатывает на своем первом выходе первый разностный сигнал, который соответствует режиму вращения электродвигателя. Когда вал электродвигателя зафиксирован, и электродвигатель заблокирован, на первом выходе дифференциального усилителя вырабатывается второй разностный сигнал, который соответствует режиму фиксации электродвигателя. Первый и второй разностные сигналы различаются в момент выборки. Момент выборки находится во временном интервале выборки и может использоваться для выборки первого и второго разностных сигналов и их различения.
Предпочтительно на первом выходе дифференциального усилителя может вырабатываться изменяющийся во времени характеристический сигнал, определяемый режимом работы электродвигателя. Таким образом, только выход разностного усилителя может анализироваться для определения фактического режима работы электродвигателя. Поскольку выходной сигнал, соответствующий режиму вращения, и выходной сигнал, соответствующий режиму фиксации, имеют отличающиеся характеристики, то их можно различить. Различение этих сигналов возможно просто путем сравнения одного выборочного значения, взятого в момент выборки для определения того, является ли фактический сигнал на первом выходе дифференциального усилителя первым или вторым разностным сигналом.
Схема может содержать дополнительно схему выборки и хранения. Эта схема соединена с первым выходом дифференциального усилителя. Схема выборки и хранения также соединена с устройством управления электродвигателем. Устройство управления электродвигателем выполнено таким образом, чтобы запускать схему выборки и хранения для выборки первого или второго разностного сигнала в момент выборки.
Схема выборки и хранения способна просто измерять величину в заданный момент времени и хранить ее значение до тех пор, пока она не будет обработана соответствующим анализатором. Использование устройства управления электродвигателем для запуска схемы выборки и хранения обеспечивает возможность синхронизации выборки сигнала с вращением электродвигателя. Момент выборки задается периодическим сигналом так, что он может быть связан с вращением электродвигателя.
Поскольку в качестве датчика используется обмотка статора электродвигателя, то может быть предпочтительным синхронизировать момент выборки с вращением электродвигателя. Возможно, что в какой-то момент обмотка статора используется для вращения двигателя. Поэтому в этом случае через обмотку статора проходит ток для создания магнитного поля, обеспечивающего вращение ротора, содержащего постоянный магнит. Таким образом, в те моменты, когда через катушку проходит ток, она не может использоваться для считывания противоэлектродвижущей силы. Устройство управления электродвигателем "знает", когда через катушку протекает ток, и поэтому может запускать схему выборки и хранения с учетом этого обстоятельства в соответствующий момент времени. Таким моментом может быть момент, когда первый и второй разностные сигналы различаются, и по катушке не проходит ток. В схеме выборки и хранения первый и второй разностные сигналы, изменяющиеся во времени, приводятся к дискретным значениям, представляющим режим работы электродвигателя.
Схема может дополнительно содержать компаратор. У компаратора имеется третий и четвертый входы и второй выход. Третий вход компаратора соединен со схемой выборки и хранения. На четвертый вход компаратора подается опорное напряжение. Компаратор устроен таким образом, чтобы сравнивать сигналы, поступающие на третий и четвертый входы, и вырабатывать на втором выходе третий сигнал, который соответствует режиму работы электродвигателя.
Компаратор может сравнивать два напряжения. Поскольку первый разностный сигнал и второй разностный сигнал различаются в момент выборки, то создается возможность для сравнения третьего входа компаратора с опорным значением, если имеется первый или второй разностный сигнал. Иначе говоря, первый и второй разностные сигналы являются периодическими функциями напряжения по времени. Величины напряжения первого разностного сигнала и второго разностного сигнала отличаются в момент выборки. Выборка этих периодических функций в момент выборки обеспечивает сведение определения временной функции к определению дискретного значения напряжения. Компаратор используется для идентификации фактической дискретной величины напряжения и определения фактического режима работы. Дискретная величина на втором выходе компаратора соответствует режиму работы электродвигателя.
Схема может дополнительно содержать индикатор, который предназначен для отображения режима работы электродвигателя. Использование индикатора дает возможность визуального представления информации о режиме работы электродвигателя. Таким образом, обеспечивается возможность быстрого получения информации о фактическом режиме работы электродвигателя.
Схема может дополнительно содержать микропроцессор. Микропроцессор используется для передачи управляющего сигнала в электродвигатель, причем управляющий сигнал имеет два значения: сигнал, задающий вращение электродвигателя в первом направлении, и сигнал, задающий вращение электродвигателя во втором направлении. Кроме того, процессор используется для определения режима работы электродвигателя, соответствующего управляющему сигналу. Таким образом, микропроцессор может путем анализа режима работы электродвигателя определять его работоспособность, причем работоспособность соответствует длительности режима вращения между первым и вторым режимами фиксации.
Микропроцессор может быть использован для определения работоспособности механической системы, например, он может индицировать работоспособность механической системы, в которой определенная последовательность режимов работы электродвигателя выполняется в соответствии с управляющим сигналом. То есть он может обеспечивать индикацию работоспособности системы, указывая, что определенная длительность режима вращения обнаружена между двумя режимами фиксации. Микропроцессор может обеспечивать управление электродвигателем и анализировать приходящие из него ответные сигналы, в результате чего микропроцессором вырабатывается сигнал о работоспособности или неработоспособности системы. Такая возможность может оказаться необходимой для проверки систем летательного аппарата перед работой.
В соответствии с другим аспектом настоящего изобретения предлагается вентиль, привод которого осуществляется электродвигателем, содержащим схему, выполненную в соответствии с настоящим изобретением.
Как правило, привод вентилей осуществляется от электродвигателей. Для определения работоспособности обычно в этих вентилях используются дополнительные датчики положения. Применение электродвигателя с предлагаемой в настоящем изобретении схемой обеспечивает возможность использования вентиля без дополнительных датчиков положения. То есть в этом случае возможно уменьшение веса.
Объектом изобретения является также летательный аппарат, содержащий схему, выполненную в соответствии с настоящим изобретением.
В соответствии с другим аспектом настоящего изобретения предлагается способ определения режима работы электродвигателя с помощью датчика, который является частью электродвигателя.
Ротор электродвигателя вращается в первом направлении и индуцирует в катушке противоэлектродвижущую силу. Эта противоэлектродвижущая сила может сравниваться с напряжением питания, в результате чего может вырабатываться первый разностный сигнал или второй разностный сигнал. Первый разностный сигнал соответствует режиму вращения электродвигателя, а второй разностный сигнал соответствует режиму фиксации электродвигателя. Первый и второй разностные сигналы различаются в момент выборки. То есть первый разностный сигнал или второй разностный сигнал выбирается в момент выборки. Первый разностный сигнал или второй разностный сигнал сравнивается с опорным напряжением, и таким образом может быть определено режим работы электродвигателя.
Как можно видеть, основным моментом настоящего изобретения является определение режима работы электродвигателя с помощью схемы вместе с датчиком, который является частью электродвигателя. Это позволяет снизить вес системы, которая способна определить режим работы электродвигателя.
Эти и другие особенности настоящего изобретения станут более ясными из нижеприведенного описания вариантов его реализации.
Варианты реализации настоящего изобретения описываются ниже со ссылками на следующие чертежи:
Фигура 1 - вид блок-схемы одного из иллюстративных вариантов реализации настоящего изобретения.
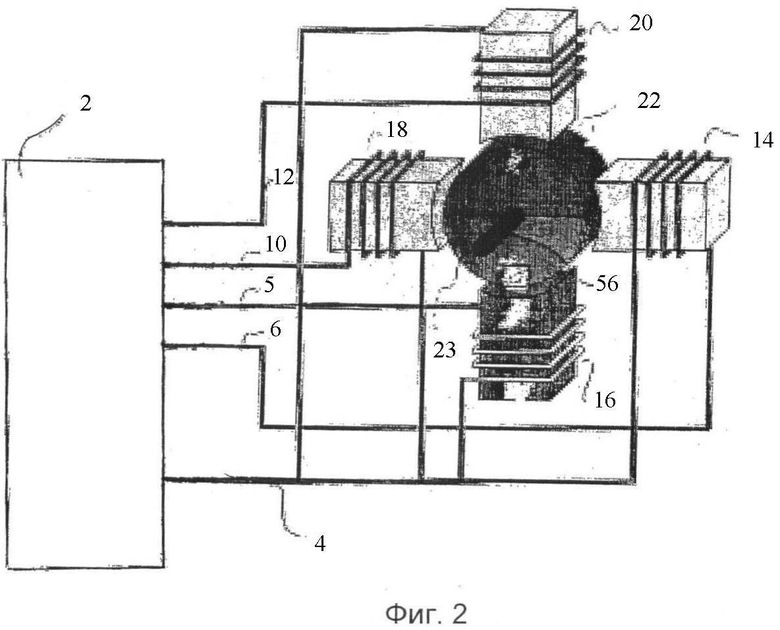
Фигура 2 - схема шагового электродвигателя.
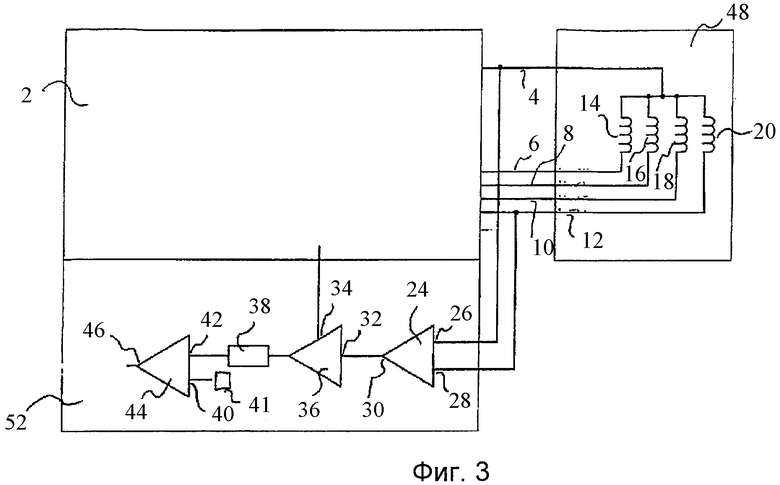
Фигура 3 - структурная логическая схема определения режима работы электродвигателя в соответствии с одним из иллюстративных вариантов реализации настоящего изобретения.
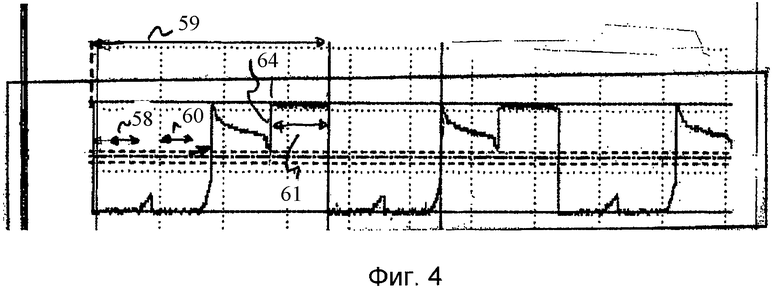
Фигура 4 - временная диаграмма первого разностного сигнала, представляющего режим вращения.
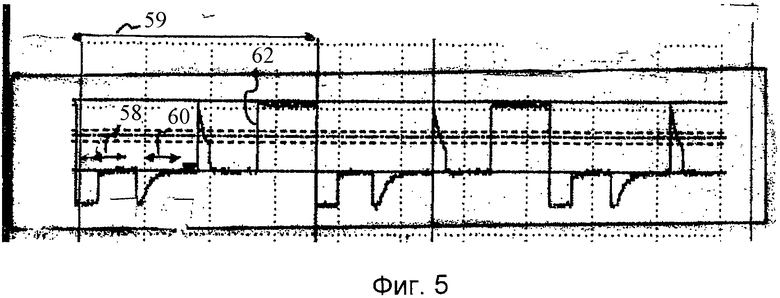
Фигура 5 - временная диаграмма второго разностного сигнала, представляющего режим фиксации.
Фигура 6 - блок-схема способа определения режима работы электродвигателя.
Фигура 7 - вид летательного аппарата, содержащего схему в соответствии с настоящим изобретением.
На фигуре 1 представлена блок-схема одного из возможных вариантов реализации настоящего изобретения. Устройство управления шаговым электродвигателем 48 указано обозначением 2. Устройство 2 управления задает направление и скорость вращения шагового электродвигателя 48. Для этого устройство 2 управления передает управляющие сигналы в шаговый двигатель 48. Шаговый двигатель 48 может быть использован для привода механической системы, например вентиля 49. В шаговый двигатель 48 встроен датчик 50, который способен определять режим работы электродвигателя 48. В качестве датчика 50 может использоваться катушка шагового двигателя 48, то есть в этом случае для определения режима работы двигателя 48 не надо использовать каких-либо дополнительных устройств.
Сигналы, полученные датчиком 50, передаются в блок 52 определения режима работы. Блок 52 определения режима работы является электронной схемой, которая способна вырабатывать дискретные сигналы, соответствующие режиму работы шагового двигателя 48. Имеются два возможных состояния шагового двигателя 48, а именно: режим вращения, соответствующий вращению шагового двигателя 48 и вала 56, и режим фиксации, соответствующий состоянию фиксации шагового двигателя 48 и вала 56. Блок 52 определения режима работы запускается устройством 2 управления шаговым двигателем. Для этого между блоком 52 определения режима работы и устройством 2 управления шаговым двигателем имеется связь.
Дискретный сигнал значения режима работы, вырабатываемый схемой 52 определения режима работы, передается в блок 54 анализа. Блок 54 анализа может, например, быть индикатором 53, на котором отображается фактическое режим работы, или микропроцессором 55, который способен обрабатывать принятое значение режима работы и анализировать сигналы. Использование микропроцессора 55 может быть необходимым, если требуется анализировать последовательность режимов работы.
На фигуре 2 приведена схема шагового электродвигателя 48. В состав шагового двигателя 48 входит ротор, содержащий постоянный магнит с южным магнитным полюсом 22 и северным магнитным полюсом 23. В середине ротора имеется вал 56, который вращается, если шаговый двигатель 48 включен. Вокруг ротора крестообразно через 90 градусов расположены статоры шагового двигателя 48. Статоры содержат обмотки 14, 16, 18 и 20 и сердечники, на которые намотаны обмотки. Ток, протекающий через каждую из обмоток 14, 16, 18, 20, вызывает появление магнитного полюса статора. Полюс статора притягивает соответствующий полюс 22 или 23 ротора. Вместе с ротором поворачивается также вал 56, так как ротор занимает устойчивое положение, когда противоположные полюса находятся друг против друга.
Для вращения электродвигателя 48 устройство 2 управления шаговым двигателем управляет током, протекающим через обмотки 14, 16, 18 и 20, в чередующейся последовательности. Иначе говоря, для вращения ротора и оси 56, например, по часовой стрелке устройство 2 управления включает первую фазу 6 для прохождения тока от источника 4 напряжения через обмотку 14 в фазу 6 с появлением магнитного полюса на обмотке 14 статора, который притягивает соответствующий полюс 22 или 23. Затем устройство 2 управления включает вторую фазу 8 для прохождения тока от источника 4 напряжения через обмотку 16 и далее во вторую фазу 8. Статор обмотки 16 имеет в этот момент такую же полярность, какую перед этим имел статор обмотки 14, и теперь магнитное поле обмотки 16 притягивает полюс 22 ротора, в результате чего происходит поворот вала на 90 градусов. Затем то же самое осуществляется с третьей фазой 10 и обмоткой 18, и далее с четвертой фазой 12 и обмоткой 20. Затем снова включается первая фаза 6 и обмотка 14. Для вращения вала 56 в противоположном направлении последовательность включений осуществляется в обратном порядке.
Как видно из вышеизложенного, для поворота вала шагового двигателя питание на обмотку статора подается только на короткий промежуток времени. Остальное время питание на обмотку устройством 2 управления не подается, так что физическое явление индукции создает в свободной обмотке противоэлектродвижущую силу (противоЭДС). ПротивоЭДС создается только в те моменты времени, когда ротор с постоянным магнитом 22, 23 вращается. Таким образом, наличие ЭДС является показателем режима вращения шагового двигателя 48.
На фигуре 3 представлена структурная логическая схема определения режима работы электродвигателя 48 в соответствии с одним из иллюстративных вариантов реализации настоящего изобретения. На фигуре показано устройство 2 управления, которое управляет работой шагового двигателя 48. Включая в заданной последовательности фазы 6, 8,10 и 12, а также соответствующие обмотки 14, 16, 18 и 20 статора электродвигателя 48, устройство 2 управления активизирует вращение электродвигателя 48 и вала 56. Схема 52 определения режима работы электродвигателя 48 соединена с линией 4 и одной из фаз 6, 8, 10 или 12. На линию 4 подается напряжение источника питания. На фигуре 3 схема 52 определения режима работы электродвигателя 48 подключена к четвертой фазе 12. Напряжение 4 питания подается на первый вход дифференциального усилителя 24. С выхода фазы 12 сигнал подается на второй вход 28 дифференциального усилителя 24.
Сигнал фазы 12 также является напряжением. Усилитель 24 осуществляет вычитание сигналов на первом входе 26 и втором входе 28 и выдает результат на первом выходе 30. Сигнал на втором входе 28 дифференциального усилителя имеет характерную форму в зависимости от режима работы электродвигателя 48. Таким образом, сигнал, получаемый на первом выходе 30, также имеет характерную форму. Он представляет собой изменение напряжения во времени. На первом выходе 30 дифференциального усилителя могут различаться две разных формы сигнала.
Первый разностный сигнал 64 соответствует режиму вращения электродвигателя 48. Второй разностный сигнал 62 соответствует режиму фиксации электродвигателя 48. Оба сигнала являются периодическими, и разница между ними наиболее заметна в момент выборки, который находится во временном интервале выборки 58, 60. Соответствующий разностный сигнал на выходе 30 подается на вход 32 схемы 36 выборки и хранения. Схема 36 выборки и хранения обеспечивает выборку входного сигнала в заданный момент времени. Момент времени, в который схема 36 выборки и хранения осуществляет выборку входного сигнала на входе 32, определяется триггером, соединенным с входом 34 этой схемы. Вход 34 соединен с устройством 2 управления шаговым двигателем 48. Устройство 2 управления имеет подробную информацию о вращении ротора. Поэтому обеспечивается возможность запуска схемы 36 выборки и хранения в такой момент времени, когда первый разностный сигнал, соответствующий режиму вращения электродвигателя 48, и второй разностный сигнал, соответствующий режиму фиксации электродвигателя 48, имеют наибольшие отличия. Выборка на входе 32 сигнала, который является либо первым разностным сигналом 64, либо вторым разностным сигналом 62, в момент выборки упрощает обнаружение фактического разностного сигнала. Выбранное значение подается из схемы 36 выборки и хранения в фильтр 38 низких частот для сглаживания сигнала перед его поступлением на третий вход 42 компаратора 44.
На четвертый вход 40 компаратора 44 подается опорное напряжение 41. Компаратор 44 обеспечивает сравнение сигнала на третьем входе 42 с сигналом на входе 40 и индикацию того, превышает или нет сигнал на входе 42 опорное напряжение 41 на четвертом входе 40. Если сигнал на третьем входе 42 ниже, чем опорное напряжение 41 на четвертом входе 40, то сигнал на втором выходе 46 компаратора 44 указывает на режим вращения шагового электродвигателя.
В противном случае, если сигнал на третьем входе 42 выше, чем опорное напряжение 41, то сигнал на втором выходе 46 указывает на режим фиксации шагового электродвигателя 48. Поэтому сигнал на втором выходе 46 компаратора 44 является дискретной величиной, указывающей на режим работы двигателя. Этот сигнал может использоваться для последующей обработки, например, для отображения рабочего режима на индикаторе 53, или же он может использоваться для анализа микропроцессором 55.
Микропроцессор 55 может использоваться в качестве блока 54 анализа, вырабатывающего управляющий сигнал для передачи в устройство 2 управления. Микропроцессор 55 обеспечивает управление электродвигателем 48 через устройство 2 управления с помощью программы, которая используется в стандартных условиях работы. Например, электродвигатель 48 может использоваться для привода вентиля. Режим работы для вентиля 49 может означать, например, что в его закрытом положении вал двигателя зафиксирован. Этот режим фиксации должен определяться микроконтроллером. Затем микроконтроллер может переключить направление вращения электродвигателя 48, и после этого в микроконтроллер будет поступать со второго выхода 46 компаратора 44 сигнал, соответствующий режиму вращения электродвигателя 48. Этот сигнал будет поступать в блок 54 анализа в течение определенного интервала времени, пока вентиль 49 не зафиксирует вал 56 электродвигателя, что является указанием достижения конечного положения. С этого момента микропроцессор 55 снова будет получать информацию о режиме фиксации электродвигателя 48. Путем анализа последовательности режимов фиксации и вращения вместе с продолжительностью режима вращения микропроцессор 55 сможет определять работоспособность вентиля.
На фигуре 4 приведена временная диаграмма первого разностного сигнала 64, представляющего режим вращения. На этой фигуре представлен график первого разностного сигнала 64. По оси Х отложено время, а по оси ординат - величина напряжения сигнала 64. Например, вал 56 шагового двигателя 48 поворачивается со скоростью 540 шагов в секунду. Первый разностный сигнал 64 снимается с первого выхода 30 дифференциального усилителя в том случае, если электродвигатель 48 поворачивается без блокировки. Как можно видеть на фигуре 4, первый разностный сигнал 64 является периодическим. Поэтому сигнал повторяется с периодом 59. Периодический сигнал типичен для вращательного движения. Сравнивая первый разностный сигнал 64 со вторым разностным сигналом 62, можно отметить, что на временных интервалах 58 и 60 отличия между сигналами 64 и 62 наиболее заметны. Например, величина первого разностного сигнала 64 в области 58 и в интервале выборки 60 может быть равна - 16 В. Таким образом, выборка первого разностного сигнала 64 в момент времени, находящийся в интервале 58 или 60, является наиболее надежной для различения первого разностного сигнала 64 и второго разностного сигнала 62. Сигнал 64 в последней четверти имеет прямоугольную форму 61. В этом примере сигнал 64 получается вычитанием напряжения питания в линии 4 и сигнала четвертой фазы 12. Прямоугольная область 61 представляет собой область, в которой на фазу 12 и обмотку 20 по сигналу устройства 2 управления подается напряжение, и они не могут использоваться для обнаружения сигнала.
На фигуре 5 представлена временная диаграмма второго разностного сигнала, представляющего режим фиксации. На фигуре 5 представлен второй разностный сигнал 62 на первом выходе 30 дифференциального усилителя 24 (аналогично первому разностному сигналу на фигуре 4). По оси Х отложено время, а по оси ординат - величина напряжения сигнала 62. Электродвигатель 48 управляется устройством 2 управления, которое задает 540 шагов в секунду, однако вал двигателя зафиксирован. Величина сигнала во временных интервалах 58 и 60 равна 0 В. Таким образом, выборка во временных интервалах 58 и 60 обеспечивает с высокой степенью надежности различение между первым разностным сигналом 64 и вторым разностным сигналом 62 в результате всего лишь одной выборки величины в момент выборки.
На фигуре 6 представлена блок-схема способа определения режима работы электродвигателя. На стадии S1 ротор электродвигателя вращается в первом направлении. При вращении ротора, имеющего полюсы 22 и 23 постоянного магнита, в катушке 14, 16, 18 или 20 индуцируется противоэлектродвижущая сила, в зависимости положения полюсов 22 и 23 постоянного магнита ротора. При сравнении противоэлектродвижущей силы и напряжения питания 4 путем их вычитания на стадии S3, на стадии S4 получают первый разностный сигнал 64 или второй разностный сигнал 62. Первый разностный сигнал 64 соответствует режиму вращения электродвигателя. Второй разностный сигнал 62 соответствует режиму фиксации электродвигателя 48. На стадии S5 осуществляется выборка соответствующего разностного сигнала в момент выборки. Результат выборки на стадии S6 сравнивается с опорным напряжением 41. На стадии S7 определяется фактический режим работы электродвигателя, и на шаге S8 индицируется режим работы электродвигателя 48.
На фигуре 7 представлен вид летательного аппарата, содержащего схему в соответствии с настоящим изобретением.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ДВИГАТЕЛЕМ С ЭЛЕКТРОННОЙ КОММУТАЦИЕЙ | 1994 |
|
RU2096906C1 |
| ЭЛЕКТРИЧЕСКИЙ ПРИВОД И СПОСОБ УПРАВЛЕНИЯ ИМ | 2008 |
|
RU2477561C2 |
| ЭЛЕКТРОПРИВОДНОЙ МОДУЛЬ | 2012 |
|
RU2592264C2 |
| Реверсивный вентильный электродвигатель | 1983 |
|
SU1132329A1 |
| Коммутатор для управления шаговым двигателем | 1990 |
|
SU1784944A1 |
| УСОВЕРШЕНСТВОВАНИЯ В СИСТЕМЕ И СПОСОБЕ ВРАЩЕНИЯ КОЛЕС В РОТОРНОЙ ЭНЕРГОВОССТАНОВИТЕЛЬНОЙ СИСТЕМЕ "ВОЗДУХ-ВОЗДУХ" И ВЛАГОПОГЛОТИТЕЛЬНОЙ ОСУШАЮЩЕЙ СИСТЕМЕ | 2007 |
|
RU2427065C2 |
| СПОСОБ И УПРАВЛЯЮЩЕЕ УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕМ С ВНУТРЕННИМИ ПОСТОЯННЫМИ МАГНИТАМИ | 2010 |
|
RU2414047C1 |
| Реверсивный вентильный электродвигатель | 1982 |
|
SU1030929A1 |
| УСТРОЙСТВО ЭЛЕКТРОМАГНИТНОГО ЗАТВОРА | 1993 |
|
RU2103709C1 |
| ВЕНТИЛЬНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1992 |
|
RU2050673C1 |

Изобретение относится к области электротехники и может быть использована для определения режима работы электродвигателей. Техническим результатом является обеспечение активного сигнала для обозначения режима работы электродвигателя. В схеме и способе определения режима работы электродвигателя в качестве датчика для определения режима работы электродвигателя используется часть самого электродвигателя. На выходе блока определения режима работы вырабатывается разностный сигнал в зависимости от режима работы электродвигателя. 4 н. и 6 з.п.ф-лы, 7 ил.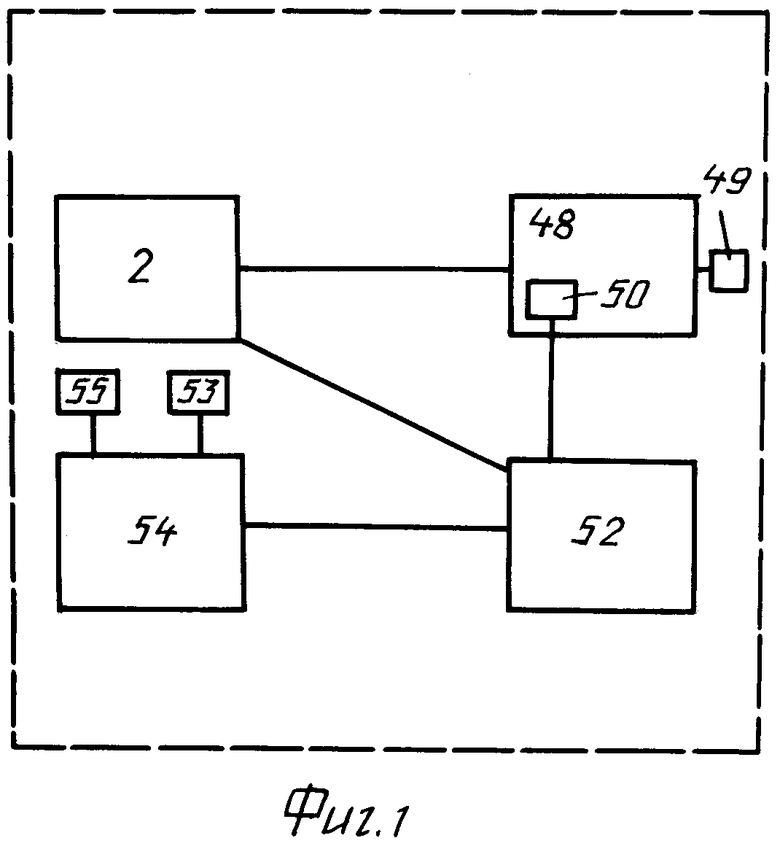
1. Схема для определения режима работы электродвигателя, включающая в себя датчик (50), содержащий катушку, которая выполнена таким образом, чтобы в ней при вращении ротора электродвигателя индуцировалась противоэлектродвижущая сила, и является обмоткой статора электродвигателя (48), блок (52) определения режима работы, причем датчик является частью электродвигателя (48), а блок определения предназначен для определения режима работы электродвигателя (48), каковым являются режим (64) вращения и режим (62) фиксации, отличающаяся тем, что блок (52) определения режима работы содержит дифференциальный усилитель (24), у которого имеется первый (26) и второй (28) входы, причем первый вход (24) соединен с источником питания, а второй вход (28) соединен с катушкой (14, 16, 18, 20), при этом на выходе блока (52) определения режима работы вырабатывается разностный сигнал в зависимости от режима работы электродвигателя.
2. Схема по п.1, в которой дифференциальный усилитель (24) имеет первый выход (30), причем дифференциальный усилитель (24) приспособлен для того, чтобы вырабатывать на первом выходе (30) первый разностный сигнал (64) или второй разностный сигнал (62), первый разностный сигнал (64) соответствует режиму вращения электродвигателя (48), второй разностный сигнал (62) соответствует режиму фиксации электродвигателя (48), первый разностный сигнал (64) и второй разностный сигнал (62) различаются в момент выборки, и момент выборки находится во временном интервале (58, 60) выборки.
3. Схема по п.2, в которой блок определения режима работы содержит дополнительно схему (36) выборки и хранения, которая соединена с первым выходом (30) дифференциального усилителя (24), а также соединена с устройством (2) управления электродвигателем (48), причем устройство (2) управления электродвигателем (48) выполнено таким образом, чтобы запускать схему выборки и хранения (36) для выборки первого разностного сигнала (64) или второго разностного сигнала (62) в момент выборки.
4. Схема по п.3, в которой блок определения режима работы содержит дополнительно компаратор (44), который имеет третий (42) и четвертый (40) входы, а также второй выход (46), причем третий вход (42) компаратора (44) соединен со схемой (36) выборки и хранения, на четвертый вход (40) компаратора (44) подается опорное напряжение 41, и компаратор (44) предназначен для того, чтобы сравнивать сигналы третьего (42) и четвертого входов (40) и получать на втором выходе (46) третий сигнал, который соответствует режиму работы электродвигателя (48).
5. Схема по п.4, которая дополнительно содержит индикатор, который выполнен таким образом, чтобы отображать режим работы электродвигателя (48).
6. Схема по п.4, которая дополнительно содержит микропроцессор (55), предназначенный для передачи в электродвигатель (48) управляющего сигнала, который является сигналом, задающим вращение электродвигателя (48) в первом направлении, или сигналом, задающим вращение электродвигателя (48) во втором направлении, причем микропроцессор (55) предназначен для определения режима работы электродвигателя (48), соответствующего управляющему сигналу, микропроцессор (55) приспособлен для анализа режима работы электродвигателя (48), микропроцессор (55) приспособлен для определения работоспособности электродвигателя (48), и работоспособность соответствует продолжительности режима вращения между первым и вторым режимами фиксации.
7. Схема по п.1, в которой электродвигатель (48) является шаговым электродвигателем.
8. Применение схемы по п.1 в приводе вентиля.
9. Применение схемы по п.1 на летательном аппарате, в частности для управления вентилем системы кондиционирования воздуха.
10. Способ определения режима работы электродвигателя с использованием схемы по п.1, включающий в себя вращение ротора электродвигателя (48) в первом направлении; индуцирование противоэлектродвижущей силы в катушке (14, 16, 18, 20); сравнение противоэлектродвижущей силы с напряжением питания; получение первого разностного сигнала (64) или второго разностного сигнала (62), причем первый разностный сигнал (64) соответствует режиму вращения электродвигателя (48), а второй разностный сигнал (62) соответствует режиму фиксации электродвигателя (48), и первый разностный сигнал (64) и второй разностный сигнал (62) различаются в момент выборки; выборку первого разностного сигнала (64) или второго разностного сигнала (62) в момент выборки; сравнение первого разностного сигнала и второго разностного сигнала с опорным напряжением; определение режима работы электродвигателя (48); и выдачу режима работы электродвигателя (48).
| ШАГОВЫЙ ДВИГАТЕЛЬ С ДАТЧИКОМ ШАГОВ | 1994 |
|
RU2085020C1 |
| Устройство для пуска синхронной @ -фазной машины | 1990 |
|
SU1823119A1 |
| Вентильный электродвигатель | 1984 |
|
SU1272413A2 |
| ШИРОКОЗАХВАТНЫЙ ПОЧВООБРАБАТЫВАЮЩИЙ АГРЕГАТ | 1995 |
|
RU2081533C1 |
| US 6084398 A, 04.07.2000 | |||
| JP 809858 A, 12.04.1996 | |||
| DE 10347208 A1, 19.05.2004 | |||
| WO 03105332 A1, 18.12.2003. | |||

