Область техники
Настоящее изобретение относится к способу и управляющей системе, позволяющим использовать реактивный крутящий момент электродвигателя с внутренними постоянными магнитами ВПМ (IPM). Это достигается за счет того, что токи возбуждения опережают соответствующие им измеряемые сигналы противоэлектродвижущей силы.
Уровень техники
В качестве принципа управления трехфазным электродвигателем с постоянными магнитами хорошо зарекомендовала себя так называемая бездатчиковая схема управления вентильным электродвигателем постоянного тока. Управление по этой схеме предусматривает, что в любой момент времени ток подводится к двум фазам, а одна фаза остается неактивной. Неактивная фаза используется для обнаружения того момента, когда наводимая фазная противоэлектродвижущая сила (ЭДС) переходит через ноль. Этот принцип называют «определение перехода через ноль». ЭДС подает сигнал о положении ротора в систему управления, которая, в свою очередь, предварительно заданным образом выполняет очередную коммутацию. Однако обнаружение перехода ЭДС через ноль возможно, только когда завершится переходный процесс при отключении тока, называемый «размагничиванием».
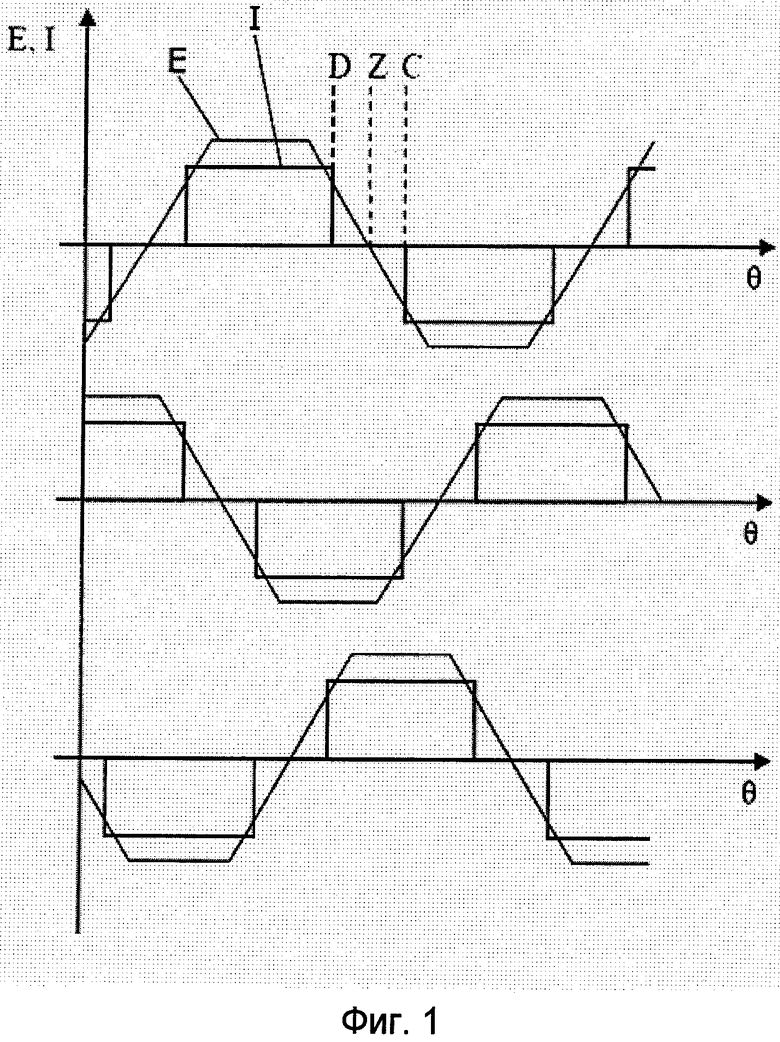
Обычно в электродвигателях описанного выше типа используются поверхностные постоянные магниты ППМ (SPM). В электродвигателях с ППМ (SPM) ротор обладает весьма незначительной явнополюсностью или вообще ею не обладает. Поэтому, чтобы достичь максимального крутящего момента на единицу тока, подаваемого в двигатель, целью управления должно быть выравнивание тока по фазе с ЭДС. Это схематически изображено на фиг.1, где изображены три идеальных фазных тока (I) и электродвижущие силы (Е), а также моменты времени D (переходный процесс при отключении тока), Z (переход через ноль) и С (следующая коммутация) для одной из фаз.
В отличие от двигателей с ППМ (SPM), электродвигатели с ВПМ (IPM) обладают тем преимуществом, что позволяют использовать магниты простой геометрической формы. Они могут быть редкоземельными, что позволяет достигать высокой интенсивности крутящего момента. Обычно электродвигатели этого типа управляются преобразователем частоты, использующим наблюдатели системы векторного управления, то есть управления, опирающегося на математическую модель электродвигателя и оперирующую синусоидами напряжения и тока.
У электродвигателей с ВПМ (IPM) обычно выражена явнополюсность, что создает дополнительный компонент крутящего момента, а именно реактивный крутящий момент. В отличие от двигателей с ППМ (SPM), в электродвигателях с ВПМ (IPM) максимальный крутящий момент на единицу тока достигается, когда ток и ЭДС не совпадают по фазе. Сдвиг по фазе, часто называемый «угол опережения подачи тока» и обозначаемый переменной γ (гамма), зависит от геометрической формы ротора, а также от рабочей точки электродвигателя. При этом в векторных схемах управления происходит изменение γ в ходе рабочего цикла, имеющее целью максимизировать крутящий момент на единицу тока.
Недостаток известных систем заключается в трудности освоения векторных схем управления, для работы которых требуются сложные аппаратные средства и программное обеспечение. Чтобы использовать векторные схемы управления, необходимы большие количества вычислений, а также точные измерения значений тока. Напротив, схема управления с определением перехода через ноль значительно проще и может работать более стабильно, поскольку в качестве обратной связи она получает информацию о положении ротора непосредственно, тогда как программное обеспечение для векторного управления должно опираться либо на сигнал обратной связи от датчика положения, либо на алгоритм управления с наблюдателем.
Известные способы подобного рода для управления электродвигателями с ППМ (SPM) раскрыты в различных патентных документах, например: ЕР 0707378, WO 2005/025050, US 6388416 и US 7084598.
В качестве цели настоящего изобретения в его различных реализациях может рассматриваться использование реактивного компонента крутящего момента электродвигателя с ВПМ (IPM), а также применение простой и устойчивой схемы управления, лишенной недостатков, которые свойственны традиционным векторным схемам управления.
Сущность изобретения
Указанная цель достигается за счет обеспечения в первом аспекте заявленного изобретения способа управления явнополюсным электродвигателем с постоянными магнитами без использования датчиков, содержащего следующие шаги:
- определение сигнала противоэлектродвижущей силы от обесточенной фазной обмотки в электродвигателе с постоянными магнитами,
- подача первого напряжения возбуждения по меньшей мере на одну из других фазных обмоток электродвигателя с постоянными магнитами, причем указанное первое напряжение возбуждения смещено по фазе относительно измеряемого сигнала противоэлектродвижущей силы.
Настоящее изобретение в принципе может использоваться для электродвигателей всех размеров, включая как небольшие двигатели, работающие от элементов питания, так и большие двигатели мощностью в несколько кВт.
Таким образом, когда на одну фазную обмотку электродвигателя с постоянными магнитами подается первое напряжение возбуждения для приведения ротора двигателя во вращение, в другой, обесточенной, фазной обмотке двигателя измеряют сигнал противоэлектродвижущей силы. Сигнал противоэлектродвижущей силы индуцируется в фазных обмотках благодаря перемещению фазных обмоток относительно постоянных магнитов двигателя.
Дополнительно способ может включать также шаг определения по меньшей мере одного перехода через ноль сигнала противоэлектродвижущей силы. Термин «переход через ноль» определяется как точка, в которой измеренный сигнал противоэлектродвижущей силы составляет ноль вольт.
Разумеется, первое напряжение возбуждения индуцирует соответствующий первый ток возбуждения в той фазной обмотке, на которую подается напряжение возбуждения. Поскольку первое напряжение возбуждения или, точнее, его основная гармоника, опережает по фазе сигнал противоэлектродвижущей силы, основная гармоника соответствующего первого тока возбуждения также опережает по фазе сигнал противоэлектродвижущей силы.
Основная гармоника первого тока возбуждения может опережать по фазе сигнал противоэлектродвижущей силы на 2-20 электрических градусов, например на 8-12 электрических градусов.
Настоящее изобретение может дополнительно содержать шаг подачи второго напряжения возбуждения на еще одну фазную обмотку электродвигателя с постоянными магнитами.
Первое и второе напряжения возбуждения могут подаваться на фазные обмотки в качестве первого и второго коммутационных импульсов. В идеальном случае эти коммутационные импульсы имеют прямоугольную форму.
Предпочтительно, чтобы второе напряжение возбуждения подавалось в то время, когда еще действует первое напряжение возбуждения, то есть со взаимным наложением первого и второго напряжений возбуждения по времени. Продолжительность взаимного наложения напряжений возбуждения по времени может быть различной в зависимости от конкретных потребностей. Так, продолжительность наложения во времени может составлять одну треть от длительности подачи напряжений возбуждения. Таким образом, первое и второе напряжения возбуждения и соответствующие токи возбуждения или, точнее, их основные гармоники могут быть смещены по фазе относительно друг друга приблизительно на 60 электрических градусов.
Далее, второе напряжение возбуждения и соответствующий второй ток возбуждения, или, точнее, их основные гармоники, опережают сигнал противоэлектродвижущей силы по фазе на 2-20 электрических градусов, например на 8-12 электрических градусов.
Как указывается в настоящем документе, на электродвигатель с постоянными магнитами для приведения его во вращение могут подаваться дополнительные напряжения возбуждения (коммутационные импульсы). В случае трехфазного электродвигателя с постоянными магнитами в любой момент времени напряжения возбуждения будут подаваться только на две фазных обмотки. Остающаяся обесточенной фазная обмотка всегда будет использоваться для измерения сигнала противоэлектродвижущей силы.
Скорость вращения электродвигателя с ВПМ (IPM) обычно изменяется с помощью частоты прикладываемых импульсов возбуждения. При этом чем выше частота, тем выше скорость вращения. В условиях установившегося режима импульсы, создающие напряжение возбуждения, имеют одинаковую длительность.
Сдвиг по фазе между импульсом возбуждения и измеряемым сигналом противоэлектродвижущей силы может зависеть от механической нагрузки на электродвигатель с ВПМ (IPM). Так, если механическая нагрузка на электродвигатель по каким-либо причинам возрастает, соответственно увеличивается и сдвиг по фазе.
Во втором своем аспекте настоящее изобретение относится к управляющей системе для бездатчикового управления явнополюсным электродвигателем с постоянными магнитами, которая содержит:
- устройство для определения сигнала противоэлектродвижущей силы от обесточенной фазной обмотки в электродвигателе с постоянными магнитами и определения по меньшей мере одного перехода через ноль указанным сигналом противоэлектродвижущей силы, и
- возбуждающее устройство, способное подавать первое напряжение возбуждения по меньшей мере на одну из других фазных обмоток электродвигателя с постоянными магнитами, причем указанное напряжение возбуждения смещено по фазе относительно измеряемого сигнала противоэлектродвижущей силы.
Кроме того, возбуждающее устройство может также подавать второе напряжение возбуждения на еще одну фазную обмотку электродвигателя с постоянными магнитами, причем указанное второе напряжение возбуждения смещено по фазе относительно измеряемого сигнала противоэлектродвижущей силы.
Первый и второй токи возбуждения связаны, соответственно, с первым и вторым напряжениями возбуждения и эти токи или, точнее, их основные гармоники, опережают измеряемый сигнал противоэлектродвижущей силы. Первый и второй токи возбуждения опережают сигнал противоэлектродвижущей силы на величину, которая характеризуется в описании первого аспекта настоящего изобретения. Кроме того, первый и второй токи возбуждения смещены по фазе относительно друг друга, как указано при раскрытии первого аспекта.
Краткое описание чертежей
Далее настоящее изобретение будет раскрыто подробнее с обращением к прилагаемым чертежам, где:
на фиг.1 показаны совпадающие по фазе токи возбуждения при управлении электродвигателем известным способом,
на фиг.2 показаны опережающие токи возбуждения согласно одной из реализаций настоящего изобретения,
на фиг.3 представлен расчет электромагнитного крутящего момента для системы, работающей известным способом, и
на фиг.4 представлен расчет электромагнитного крутящего момента для системы согласно настоящему изобретению.
Хотя изобретение может иметь различные модификации и альтернативные формы, на фиг.2-4 в качестве примера представлена его конкретная реализация, которая будет описана здесь подробно. Необходимо, вместе с тем, иметь в виду, что изобретение не ограничивается раскрытыми здесь вариантами. Напротив, предполагается, что настоящее изобретение охватывает все модификации, эквиваленты и альтернативы, соответствующие его духу и содержанию, которые определяются прилагаемой формулой изобретения.
Подробное описание чертежей
Как упоминалось выше, векторные схемы управления трудны в освоении и требуют для своего воплощения сложные аппаратные средства и программное обеспечение. Таким образом, для применения векторных схем управления требуются большие количества вычислений, а также точные текущие измерения значений тока.
Напротив, схема управления с определением перехода через ноль значительно проще и может работать более стабильно, поскольку в качестве обратной связи она непосредственно получает информацию о положении ротора, тогда как программное обеспечение для векторного управления должно опираться либо на сигнал обратной связи от датчика положения, либо на алгоритм управления с помощью наблюдателя.
В настоящем изобретении предлагается скомбинировать схему управления с определением перехода через ноль и явнополюсный ротор электродвигателя.
По сравнению с известными подходами настоящее изобретение обладает рядом преимуществ. За счет соединения принципов управления электродвигателем на основе перехода ЭДС через ноль с современными технологиями электродвигателей с ВПМ (IPM) могут быть достигнуты следующие преимущества:
- могут применяться магниты с более простой геометрической формой,
- используется простая и устойчивая схема управления для электродвигателей с постоянными магнитами,
- улучшается КПД благодаря использованию реактивного крутящего момента и уменьшению потерь в стали,
- улучшается стабильность управления благодаря более продолжительному времени размагничивания нагруженной фазы.
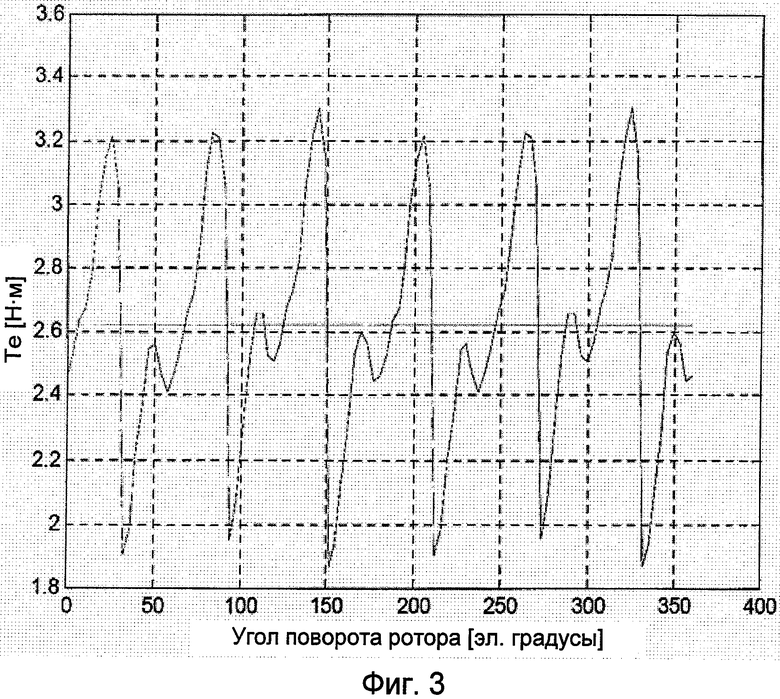
На практике настоящее изобретение реализуется за счет уменьшения промежутка времени между переходом противоЭДС через ноль и следующей коммутацией. На фиг.2 точка перехода противоЭДС через ноль обозначена буквой Z, а точка следующей коммутации - С. Настоящее изобретение помогает максимизировать крутящий момент на единицу тока. Еще одно преимущество настоящего изобретения состоит в увеличении промежутка времени между D и Z, что позволяет продлить период размагничивания фазы после отключения тока.
На фиг.2 представлены идеальные токи возбуждения (1-6) трехфазного электродвигателя с ВПМ (IPM). Как показано на фиг.2, токи возбуждения одновременно подаются только на две фазы, то есть их подача регулируется следующим образом.
Ток 1 возбуждения подается к фазе I. Вслед за подачей тока 1 подается ток 2 возбуждения, который поступает к фазе II. Токи 1 и 2 накладываются друг на друга по времени на величину, равную половине продолжительности подачи каждого из этих токов. Аналогичным образом вслед за подачей тока 2 подается ток 3 возбуждения, который поступает к фазе III. И здесь имеется наложение по времени между токами 2 и 3. Вслед за подачей тока 3 подается ток 4 возбуждения, который, также с наложением по времени, поступает к фазе I. Аналогичным образом вслед за подачей тока 4 подается ток 5 возбуждения к фазе II, после чего следует подача тока 6 возбуждения к фазе III. Как показано на фиг.2, в любой момент времени подается два тока возбуждения. Обесточенная фаза всегда используется для измерения сгенерированной противоЭДС.
Как показано на фиг.2, подаваемые токи возбуждения и измеренная противоЭДС смещены по фазе относительно друг друга, при этом токи возбуждения, связанные с соответствующими напряжениями возбуждения, опережают измеренную противоЭДС на 2-20 электрических градусов, например 8-12 электрических градусов.
На фиг.2 один механический оборот двигателя соответствует 720 электрическим градусам, т.е. двум периодам электрического сигнала. Таким образом, при каждом механическом обороте применяется 12 коммутаций.
Для четырехполюсного электродвигателя с ВПМ (IPM) частота коммутации должна составлять от 800 до 1600 Гц, если скорость вращения двигателя должна изменяться от 2000 до 4000 оборотов в минуту.
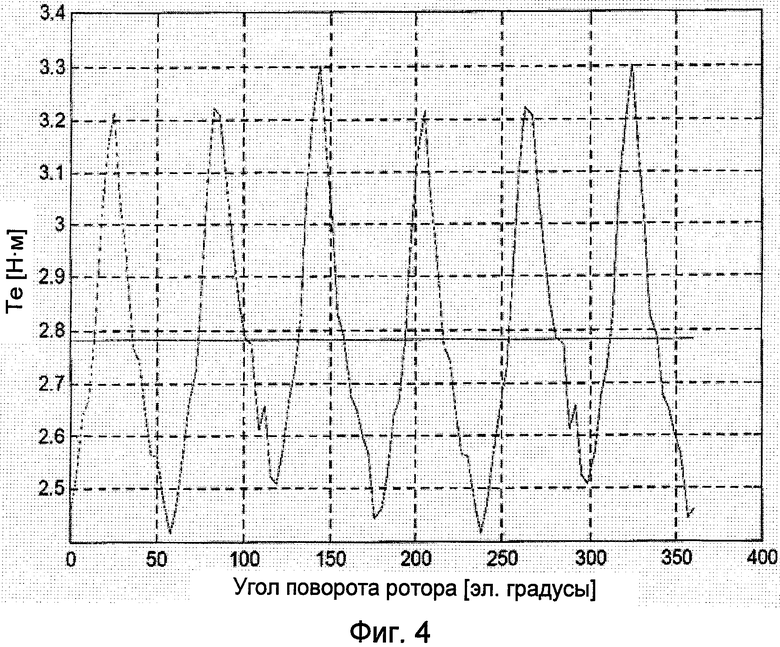
Увеличение крутящего момента на единицу тока в результате сокращения промежутка времени между Z и С может быть продемонстрировано в расчетах методом конечных элементов (МКЭ). На фиг.3 представлены результаты расчетов электромагнитного крутящего момента Те в течение периода электрических колебаний. Токи имеют форму волны, близкую к прямоугольной, и совмещены по фазе с противоЭДС, как показано на фиг.1. С другой стороны, на фиг.4 представлена та же ситуация, но только токи здесь опережают по фазе противоЭДС на 12 электрических градусов.
Видно, что смещение тока по фазе вперед увеличило средний электромагнитный крутящий момент с 2,61 до 2,79 Н·м, что означает повышение крутящего момента на 7%. Поскольку это достигается при той же величине тока и, следовательно, тех же потерях в меди, обеспечивается соответствующее повышение КПД. Кроме того, составляющая тока будет подавлять магнитное поле ротора, что уменьшает плотность потока статора и снижает потери в стали. Это обеспечивает дальнейшее повышение КПД электродвигателя.
Настоящее изобретение относится к области электротехники и касается способа управления явнополюсным электродвигателем с постоянными магнитами, а также управляющего устройства (системы), позволяющих использовать реактивный крутящий момент электродвигателя с внутренними постоянными магнитами ВПМ (IPM). Предлагаемый способ включает шаги измерения сигнала противоэлектродвижущей силы обесточенной фазной обмотки электродвигателя с постоянными магнитами и подачи первого напряжения возбуждения, по меньшей мере, на одну из других фазных обмоток электродвигателя с постоянными магнитами, причем указанное первое напряжение возбуждения смещено по фазе относительно измеряемого сигнала противоэлектродвижущей силы. Кроме того, настоящее изобретение касается особенностей выполнения системы управления, реализующей вышеуказанный способ. Технический результат - обеспечение возможности использования реактивного компонента крутящего момента электродвигателя с ВПМ (IPM), a также простота и устойчивость предлагаемого устройства (системы) управления. 2 н. и 10 з.п. ф-лы, 4 ил.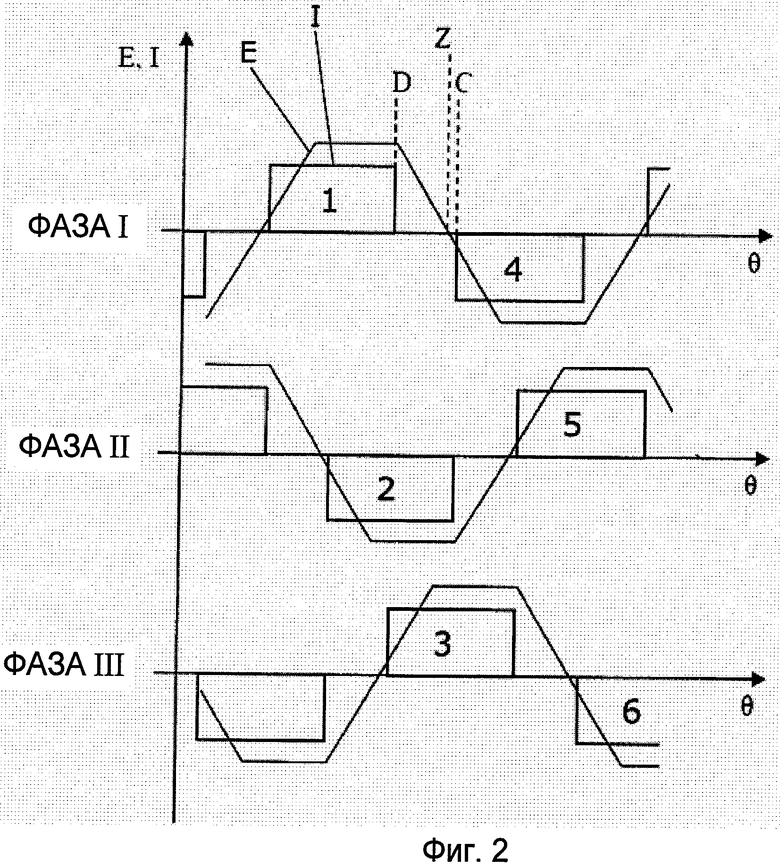
1. Способ управления явнополюсным электродвигателем с постоянными магнитами без использования датчиков, содержащий следующие шаги:
определение сигнала противоэлектродвижущей силы от обесточенной фазной обмотки в электродвигателе с постоянными магнитами и
подача первого напряжения возбуждения, по меньшей мере, на одну из других фазных обмоток электродвигателя с постоянными магнитами, причем указанное первое напряжение возбуждения смещено по фазе относительно измеряемого сигнала противоэлектродвижущей силы.
2. Способ по п.1, дополнительно содержащий шаг определения, по меньшей мере, одного перехода через ноль сигнала противоэлектродвижущей силы.
3. Способ по п.1 или 2, в котором первое напряжение возбуждения и соответствующий ему первый ток возбуждения опережают по фазе сигнал противоэлектродвижущей силы.
4. Способ по п.3, в котором основная гармоника первого тока возбуждения опережает сигнал противоэлектродвижущей силы на 2-20 эл.град., например, на 8-12 эл.град.
5. Способ по любому из пп.1, 2 и 4, дополнительно содержащий шаг подачи второго напряжения возбуждения на еще одну фазную обмотку электродвигателя с постоянными магнитами.
6. Способ по п.5, в котором второе напряжение возбуждения и соответствующий ему второй ток возбуждения опережают по фазе сигнал противоэлектродвижущей силы.
7. Способ по п.6, в котором основная гармоника второго тока возбуждения опережает сигнал противоэлектродвижущей силы на 2-20 эл.град., например, на 8-12 эл.град.
8. Способ по п.6 или 7, в котором основные гармоники первого и второго токов возбуждения смещены по фазе относительно друг друга.
9. Способ по п.8, отличающийся тем, что основные гармоники первого и второго токов возбуждения смещены по фазе относительно друг друга приблизительно на 60 эл.град.
10. Управляющая система для бездатчикового управления явнополюсным электродвигателем с постоянными магнитами, содержащая:
приспособление для определения сигнала противоэлектродвижущей силы от обесточенной фазной обмотки в электродвигателе с постоянными магнитами и определения, по меньшей мере, одного перехода через ноль указанным сигналом противоэлектродвижущей силы и
возбуждающее устройство, выполненное с возможностью подачи первого напряжения возбуждения, по меньшей мере, на одну из других фазных обмоток электродвигателя с постоянными магнитами, причем указанное напряжение возбуждения смещено по фазе относительно измеряемого сигнала противоэлектродвижущей силы.
11. Управляющая система по п.10, в которой возбуждающее устройство выполнено с возможностью подачи второго напряжение возбуждения еще на одну фазную обмотку электродвигателя с постоянными магнитами, причем указанное второе напряжение возбуждения смещено по фазе относительно измеряемого сигнала противоэлектродвижущей силы.
12. Управляющая система по п.11, в которой первый и второй токи возбуждения связаны соответственно с первым и вторым напряжениями возбуждения и основные гармоники указанных первого и второго токов возбуждения опережают измеренный сигнал противоэлектродвижущей силы.
| EP 0707378 A1, 17.04.1996 | |||
| Вентильный электродвигатель | 1990 |
|
SU1774455A1 |
| СПОСОБ УПРАВЛЕНИЯ ВЕНТИЛЬНЫМ ЭЛЕКТРОДВИГАТЕЛЕМ | 2000 |
|
RU2207700C2 |
| БЕСКОНТАКТНЫЙ СЛЕДЯЩИЙ ЭЛЕКТРОПРИВОД | 2001 |
|
RU2187195C2 |
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| US 6388416 A, 14.05.2002 | |||
| US 7084598 A, 18.11.2004 | |||
| СПОСОБ ПРОИЗВОДСТВА ПИЩЕВОЙ ДОБАВКИ ИЗ ПЛОДОВ ОБЛЕПИХИ | 1999 |
|
RU2178256C2 |
| US 5929577 A, 27.07.1999 | |||
| ПОСАДОЧНАЯ МАШИНА | 2010 |
|
RU2448447C1 |

