Изобретение относится к области очистки наружной поверхности трубопроводов любых диаметров от старой изоляции, ржавчины, грязи и т.п. и может быть использовано при строительстве магистральных трубопроводов и проведении ремонтно-восстановительных работ.
Известен механизм для привода ротора очистной машины, содержащий электропривод с двухступенчатой зубчатой передачей [Авт. свид. СССР №1505609, кл. B08B 9/02, опубл. 1989 г.].
Недостаток этого механизма заключается в том, что механизм сообщает ротору значительные динамические нагрузки на ротор из-за больших оборотов и резкого пуска и останова ротора. Большие обороты ротора создают опасность для обслуживающего персонала при очистке изоляции. Кроме того, такой механизм требует использования сложного в изготовлении и дорогостоящего зубчатого ротора.
Наиболее близким к заявляемому объекту является механизм для привода ротора очистной машины, содержащий промежуточный цилиндрический редуктор, вал которого через муфту сцепления соединен с шестерней для вращения зубчатого ротора очистной машины [Галеев В.Б., Сощенко Е.М., Черняев Д.А. Ремонт магистральных трубопроводов и оборудования перекачивающих станций. М.: Недра, 1968, с.97-99].
Недостаток данного механизма, как и предыдущего аналога, - значительные динамические нагрузки на ротор, опасность для обслуживающего персонала при очистке изоляции, а также необходимость использования сложного в изготовлении и дорогостоящего зубчатого ротора.
Изобретение направлено на снижение динамических нагрузок на ротор с одновременным упрощением конструкции последнего и обеспечением качественной очистки поверхности магистральных трубопроводов, а также повышение безопасности для обслуживающего персонала.
Это достигается тем, что в механизме для привода ротора очистной машины, содержащем электропривод с редуктором и передаточным механизмом, согласно изобретению передаточный механизм соединен с кривошипно-шатунным механизмом, связанным с кареткой, установленной в закрепленной на раме направляющей, каретка снабжена осью, на которой соосно установлены с возможностью вращения рабочие блоки, каждый из которых охвачен гибким элементом и образует канатно-блочную систему, каждая из которых снабжена вспомогательными направляющими блоками для изменения направления тягового усилия из плоскости вращения рабочего блока в плоскость вращения ротора, при этом гибкие элементы одним концом укреплены через демпфирующие элементы на раме, а другим - шарнирно на роторе.
На чертеже схематично изображен предлагаемый механизм для привода ротора очистной машины.
Механизм для привода ротора 1 очистной машины включает электродвигатель 2 с червячным редуктором 3, выходной вал которого соединен, например, посредством шестерни 4 и укрепленного на раме (не показана) передаточного механизма, например, зубчатого колеса 5, с кривошипно-шатунным механизмом 6. Последний соединен с кареткой 7, установленной в укрепленных на раме направляющих 8 с возможностью осуществления возвратно-поступательного движения. Каретка 7 снабжена осью 9, на которой установлены с возможностью вращения рабочие блоки 10 и 11, каждый из которых охвачен гибким элементом 12 (и 13), например, стальным канатом, и образует канатно-блочную систему. На чертеже условно сплошной жирной линией показана канатно-блочная система А, а пунктирной жирной линией - канатно-блочная система Б. При этом одна из канатно-блочных систем, например А, снабжена вспомогательными направляющими блоками 14 и 15, служащими для перераспределения тягового усилия гибкого элемента 12 из плоскости вращения рабочего блока 10 в плоскость вращения ротора, а другая (Б) - направляющими блоками 16, 17 и 18 для перевода тягового усилия гибкого элемента 13 из плоскости вращения рабочего блока 11 в плоскость вращения ротора. Гибкие элементы 12 и 13 с одной стороны прикреплены к раме (один из них - на передней части рамы, другой - на задней) через демпфирующие элементы, например, пружины 19 и 20, а с другой стороны шарнирно укреплены на роторе, например, посредством тягового пальца 21.
Таким образом, механизм для привода ротора представляет собой канатно-блочные системы, каждая из которых охвачена своим гибким элементом и имеет свой рабочий блок, укрепленный на каретке, установленной с возможностью возвратно-поступательного движения по направляющим, при этом один конец гибких элементов укреплен на роторе, а другой - на раме.
Механизм работает следующим образом.
Включают электродвигатель, передающий крутящий момент через червячный редуктор на кривошипно-шатунный механизм 6, который приводит каретку 7 в возвратно-поступательное движение по направляющим 8. Удаляясь от ротора 1, каретка 7 с установленными на ней рабочими блоками 10 и 11 тянет за собой гибкие элементы 12 и 13 канатно-блочных систем А и Б, при этом гибкий элемент 12 канатно-блочной системы А натягивается и тянет за собой ротор, поворачивая его на удвоенную величину хода кривошипно-шатунного механизма. Ротор, поворачиваясь, тянет за собой гибкий элемент 13 канатно-блочной системы Б, что становится возможным, из-за того что при удалении каретки от ротора часть гибкого элемента 13 канатно-блочной системы Б высвобождается. При приближении каретки к ротору, наоборот, натягивается гибкий элемент 13 канатно-блочной системы Б, который увлекает за собой ротор и происходит поворот ротора в другую сторону, при этом ротор ведет за собой гибкий элемент 12 канатно-блочной системы А. В результате происходит знакопеременное вращение ротора, при котором очистные инструменты очистной машины будут совершать многократно перекрывающие движения, т.е. будет происходить многократная чистка одной и той же площади поверхности.
Следует отметить, что предлагаемый механизм позволит изменить угол поворота ротора путем изменения радиуса кривошипа в зависимости от требуемой величины перекрывающих движений рабочих инструментов.
Использование предлагаемого механизма привода по сравнению с прототипом позволит снизить динамические нагрузки на ротор за счет обеспечения ротору более низких оборотов и достижения более плавного его пуска и останова. При этом достигается качественная очистка изоляции за счет того, что предлагаемый механизм сообщает ротору знакопеременное вращение, при котором разрушаемая изоляция будет подвергаться знакопеременным физическим воздействиям с многократно перекрывающими движениями очистных инструментов.
Следует подчеркнуть, что более низкие обороты и более плавный пуск и останов ротора обеспечат повышение безопасности для обслуживающего персонала при очистке изоляции.
Значительным преимуществом предлагаемого изобретения является то, что предлагаемый механизм не требует наличия зубьев на роторе, что позволит исключить использование трудоемкого в изготовлении и дорогостоящего зубчатого венца, как это имеет место в прототипе.
| название | год | авторы | номер документа |
|---|---|---|---|
| Трубогибочная машина | 1973 |
|
SU467556A1 |
| ГРУППОВОЙ ПРИВОД ШТАНГОВЫХ НАСОСОВ КУСТА СКВАЖИН (ВАРИАНТЫ) И СПОСОБ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2466297C2 |
| Устройство инженера Лаукарта В.Ф. для выкапывания картофеля | 1984 |
|
SU1269760A1 |
| УСТРОЙСТВО МАНЕВРОВОЕ | 2007 |
|
RU2357885C1 |
| РАБОЧИЙ МЕХАНИЗМ МАШИНЫ ДЛЯ ОЧИСТКИ НАРУЖНОЙ ПОВЕРХНОСТИ ТРУБОПРОВОДА | 1996 |
|
RU2108874C1 |
| Сучкорезная машина | 1981 |
|
SU1054052A1 |
| КОМБАЙН КУЗНЕЦОВА ДЛЯ СНЯТИЯ НАРУЖНОГО ГИДРОИЗОЛЯЦИОННОГО ПОКРЫТИЯ С МАГИСТРАЛЬНЫХ ТРУБОПРОВОДОВ И ЕГО ОБРАБАТЫВАЮЩИЕ АГРЕГАТЫ ПОЭТАПНОЙ ОЧИСТКИ ТРУБОПРОВОДА | 1995 |
|
RU2098204C1 |
| УСТРОЙСТВО ДЛЯ НАНЕСЕНИЯ РУЛОННОГО ИЗОЛЯЦИОННОГО МАТЕРИАЛА НА МАГИСТРАЛЬНЫЙ ТРУБОПРОВОД | 2012 |
|
RU2502010C1 |
| Установка для полирования плоских поверхностей | 1991 |
|
SU1779550A1 |
| Механизм подачи канатно-цепной пилы | 1980 |
|
SU935613A1 |
Изобретение относится к области очистки наружной поверхности трубопроводов, в частности к механизмам для приводов ротора очистных машин. Механизм для привода содержит электропривод с редуктором, который через передаточный механизм соединен с кривошипно-шатунным механизмом, связанным с кареткой. Каретка снабжена осью, на которой соосно установлены с возможностью вращения рабочие блоки, охваченные гибкими элементами и образующие канатно-блочные системы. Каждая из указанных систем снабжена вспомогательными направляющими блоками для изменения направления тягового усилия из плоскости вращения рабочего блока в плоскость вращения ротора. При этом гибкие элементы одним концом укреплены через демпфирующие элементы на раме, а другим - шарнирно на роторе. Механизм позволит снизить динамические нагрузки на ротор очистной машины с одновременным упрощением конструкции последнего и обеспечением качественной очистки поверхности магистральных трубопроводов. 1 ил.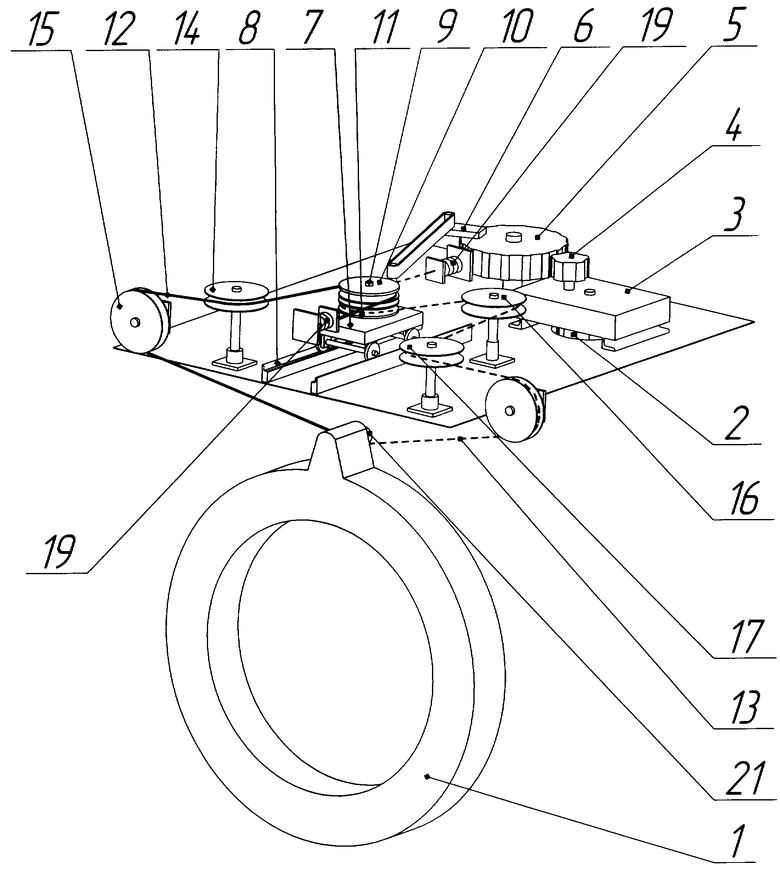
Механизм для привода ротора очистной машины, содержащий электропривод с редуктором и передаточным механизмом, отличающийся тем, что передаточный механизм соединен с кривошипно-шатунным механизмом, связанным с кареткой, установленной в закрепленной на раме направляющей, каретка снабжена осью, на которой соосно установлены с возможностью вращения рабочие блоки, каждый из которых охвачен гибким элементом и образует канатно-блочную систему, каждая из которых снабжена вспомогательными направляющими блоками для изменения направления тягового усилия из плоскости вращения рабочего блока в плоскость вращения ротора, при этом гибкие элементы одним концом укреплены через демпфирующие элементы на раме, а другим - шарнирно на роторе.
| УСТРОЙСТВО ДЛЯ ОЧИСТКИ НАРУЖНОЙ ПОВЕРХНОСТИ ТРУБОПРОВОДА | 1999 |
|
RU2145911C1 |
| УСТРОЙСТВО ДЛЯ ОЧИСТКИ НАРУЖНОЙ ПОВЕРХНОСТИ ТРУБОПРОВОДОВ | 2002 |
|
RU2245747C2 |
| РАБОЧИЙ МЕХАНИЗМ МАШИНЫ ДЛЯ ОЧИСТКИ НАРУЖНОЙ ПОВЕРХНОСТИ ТРУБОПРОВОДА | 1997 |
|
RU2108875C1 |
| CA 2059045 A1, 09.07.1992 | |||
| JP 5318252 A, 03.12.1993 | |||
| Бесконтактный электромагнитный привод роторов | 1984 |
|
SU1165904A2 |

