Настоящее изобретение относится к оборудованию для обработки металлов давлением и, в частности, к машинам для гибки труб преимущественно больших диаметров, применяемых в атомном машиностроении и котлостроении. Известны конструкции машины для , гибки труб больших диаметров, содержащие станину с установленными на ней направляющим устройством для тру бы и центральным валом, на котором смонтированы гибочный механизм и барабаны, соединенные с приводом ма.шины. Конструкция гибочного механизма в этих машинах достаточно сложна, а направляющее устройство не обеспечивает жесткости и надежности в работе за счет -отсутствия необходимой опорной плоскости, что ухудшает качество гибки. Кроме того отсутствуют устройства позволяющие механизировать трудоемкий процесс гибки труб больших диаметров и повысить производительность машины. Целью настоящего изобретения явля ется создание такой конструкции машины, которая позволила бы повысить качество и производительность гибки и упростить конструкцию машины. Это достигается тем, что гибочный механизм выполнен в виде кривошипа с выдвижными и неподвижными упорами, боковыещеки которого соединены шарнирными рачагами с поворотной зажимной скобой, смонтированной на оси, эксцентрично закрепленной в барабанах, при этом на внутренней торцевой поверхности указанной скобы выполнен площадки для взаимодействия с упорами кривошипа, а на станине установлен механизм подъема и продольного перемещения трубы, выполненный в вид самоходной каретки с установленной на ней рамой, имеющей возможность пе ремещения в вертикальной плоскости и снабженной зажимом для трубы. При этом направляющее устройство выполнено в виде лотка, установленно го с возможностью продольного переме щения на ползуне, монтированном на винтах в подъемном суппорте, закрепленном на станине и соединенном системой рычагов с приводом суппорта и канатно-блочной системой с механизмо подъема и продольного перемещения трубы. На фиг,1 представлен вид машины спереди; на фиг,2 - разрез машины по главной оси; на фиг.З дана конструкция гибочного механизма; на фиг.4 - конструкция кривошипа; на фиг.З - кинематическая схема машины. Трубогибочная машина включает в себя сварную станину 1, в ,верхней части которой в опорах 2 подвижно смонтирован центральный вал 3. На центральном валу 3 по главной оси машины установлен гибочный шаблон 4, а симметрично оси шаблона установлены гибочные барабаны 5 и блоки обратного хода 6, связанные соответственно тяговыми цепями 7 и канатами 8 со штоками гидроцилиндров 9 и 10, укрепленных на станине. На левой цапфе вала 3 укреплены тормозные блоки 11, связанные при- помощи канатов 12 со штоками гидроцилиндров 13, укрепленных сбоку на станине. На правой цапфе вала 3 укреплены противовес 14, механизм отсчета, угла 15, рычаг 16, взаимодействующий с верхним упором 17 при возврате гибочного шаблона в исходное положение. Гибочный шаблон 4 монтируется на валу 3 при помощи кривошипа 18, цапфы 19 которого через рычаги 20 щарнирно связаны с зажимной скобой 21 и-со сменным башмаком 22. В свою очередь,: зажимная скоба 21 установлена на оси 23, эксцентрично закрепленной в барабанах 5. В боковых щеках кривошипа 18 вмонтированы выдвижные упоры 24, которые позволяют фиксировать зажимную скобу 2 в положении ее наибольшего удаления от центрального вала. В нижней части станины выполнен жесткий упор 25, взаимодействующий с нижней частью зажимной скобы 21 при возврате гибочного шаблона в исходное положение. В центральной части на станине .. смонтирован корпус 26, в направляющих которого подвижно установлен ползун 27, перемещающийся в вертикальной плоскости. В верхней части ползуна 27 в продольных горизонтальных направляющих установлена каретка 28, несущая направляющий лоток 29. Снизу на каретке 28 укреплена зубчатая рейка 30, находящаяся в постоянном зацеплении с шестерней 31 реверсивного привода перемещения каретки (на фиг. не показан). Ползун 27 монтируется в вертикальных направляющих подъемного суппорта 32, в котором подвижно укреплены гай ки 33 с зубчатым венцом, приводимые во вращение при помощи шестерни 34 привода 35. Внутри гаек 33 устаиовле ны винты 36, верхние концы которых жестко закреплены в ползуне 27, служащие для регулировки высоты каретки 28 с лотком 29 при переналадке машин на другой радиус гиба. Подъемный cyn порт 32 связан с корпусом 26 при помощи колено-распорных рычагов 37, устанавливаемых в рабочее положение (в распор) через кривошипно-шатунный механизм 38 от привода 39, служащих для быстрого отвода и подвода направ ляющего лотка 29 с трубой 40 к ручью гибочного шаблона 4. В задней части станины машины на i регулируемом ползуне (на фиг. не показан) укреплен узел перемещения сменного дорна 41 и штанги 42. Узел перемещения дорна канатами 43 и 44 через блоки 45, 46 и 47 соединен соответственно с ползуном 27 и кареткой 48, а через блок 49 с рамкой 50, которая установлена на каретке 48 с возможностью перемещения в вертикальной плоскости. Каретка 48 перемещается по станине при помощи каната 51, соединенного с приводом каретки (на фиг. не показано). На рамке 50 смонтирован механизм зажима 52 трубы, включающий в себя опорный ролик 53, направляющую втулку, самозаклинивающийся эксцентрик 54, подвешенный к нижнему шарниру , двух рычажков 55 четырехзвенника, которые действуют как колено-распорные рь1чаги, удерживаемые пружиной в исходном и рабочем положениях. Такая конструкция механизма захвата обеспечивает автоматический захват и освобождение конца трубы 40 при взаимодействии каретки 48 с неподвижным вилообразным упором 56, который, остановив ось среднего шарнира и сжимая пружину, выводит колено-распорйые рычаги 55 и поднимает зксцентрик 54, отводя его от трубы. Трубогибочная машина работает следующим образом. Заготовку трубы 40 подъемно-транспортными средствами (на4)иг. не показано) заводят в машину и надвигают на дорн 41. Каретка 48 с механизмом зажима 52 установлена в крайнее правое положе ние. При дальнейшем движении трубы по дорну ее свободный конец устанавливается на втулку 54 и, воздействуя на рычаги механизма зажима, фиксируется зксцентриком 55, после чего каретка 48 автоматически включается и перемещает трубу до упора на лотке 29. В этот момент поступает команда на включение каретки 48 и труба занимает исходное положение перед гибкой.При этом второй конец трубы удерживается подъемно-транспортнь1ми средствами.. fT, , . Включают привод 39 кривошипно-шатунного маханизма 38 и, устанавливая рычаги 37 в распор, поднимают суппорт 32 и ползун 27 с кареткой 28 и лотком 29 вверх. Одновременно каната-. ми 43 и 44 через систему блоков под-: нимается узел перемещения дорна и рамка 50 с механизмом зажима 52 и, следовательно, труба 40, которая приходит в соприкосновение с ручьем гибочного шаблона 4 В этот же момент направляющий лоток догоняет трубу и подпирает ее снизу, обеспечивая установку в рабочем положении. Шестерня 31 отключается от привода перемещения лотка 29i обеспечивая последнему свободное перемещение совместно с трубой за счетсил трения, возникающих при гибке. - .- Включением силовых гидроцилиндров 9 на рабочий ход осуществляют движение штоков с цепями 7 и поворот гибочных барабанов 5 с осью 23, на которой укреплена зажимная скоба 21. Во время движения скобы 21 с башмаком 22 до взаимодействия с изгибаемой трубой 40, тормозные блоки 1I удерживают центральный вал 3 с гибочным шаблоном 4 в исходном положении, при котором рычаг 16 прижат к верхнему упору 17. В-момент контакта башмака 22 е поверхностью изгибаемой трубы возникают силы, обеспечнвакядие самозажим трубы н начало гибочного процесса на заданный угол. Величина усилий самозажима регулируется автоатически в зависимости от величины крутящего момента, определяемой меаническими характеристиками изгибаеой трубы. В процессе гибки шаблон 4, ачинает поворачиваться и наматывает рубу на профильный ручей, а прямая асть трубы совместно с направляющим 54 29 перемещается в направлении лотком гибки. При достижении требуемого угла гибки силовые гидроцилиндры 9 выклю чаются, включается гидроцилиндр, который, воздействуя на штангу 42, вы водит доря 41 из зоны гибки. Включают гидроцилиндры 10 на рабочий ход и отводят скобу 21 с башмаком 22 от изогнутой трубы до взаимодействия упоров 24 в момент, когда скоба достигла наибольшего удаления от вала 3 При этом гибочный шаблон 4 остается в положении окончания гибки за счет .тормозного действия блоков 11 через контакты 12 и гидроцилиндры 13. После разжима труба опирается на ручьи гибочного шаблона 4 и лотка 29, Включают привод 39 кривошипно-шатунного механизма 38 и устанавливают колено-распорные рычаги 37 в положе-. ние, показанное на фиг,2. При этом происходит опускание ползуна 27 и суппорта 32 с кареткой 28 и лотком 29, а также рамки 50 каретки 48 вместе с изогнутой трубой. В результате этого образуется зазор между трубой и ручьями гибочного шаблона 4. После этого согнутая труба удаляется из машины, а рабочие механизмы возвращаются в исходное положение для осуществления следующей гибки.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ГИБКИ ТРУБ | 2010 |
|
RU2434703C1 |
| Трубогибочная машина | 1988 |
|
SU1556786A1 |
| Трубогибочный комплекс | 1987 |
|
SU1470389A1 |
| Устройство для гибки труб | 1982 |
|
SU1152684A1 |
| УСТРОЙСТВО ДЛЯ ГИБКИ И ЗАЖИМА ТРУБ | 1992 |
|
RU2043803C1 |
| Станок для гибки змеевиков | 1990 |
|
SU1726091A1 |
| Трубогибочный станок | 1979 |
|
SU837471A1 |
| СПОСОБ ГИБКИ ТРУБ И СТАНОК ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2010 |
|
RU2422229C1 |
| Станок для загибки и отрезки концов трубных спиралей | 1981 |
|
SU986541A1 |
| Установка для изготовления пакетов экономайзеров | 1988 |
|
SU1590298A1 |
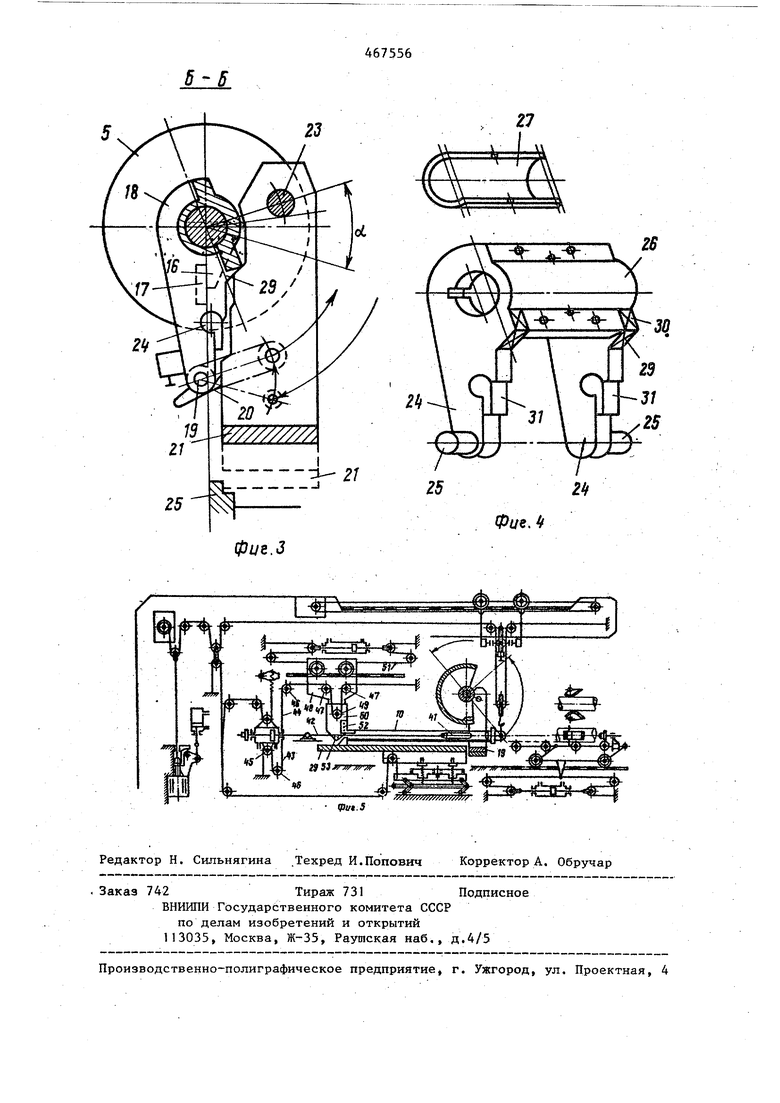
I. ТРУБОГИВОЧНАЯ МАШИНА для гибки труб, преимущественно большогодиаметра, содержащая станину с уста- новленгЕьйи на ней направляющими, устройством для трубы и центральным валом, на котором смонтированы гибочный механизм и барабаны, соединенные с приводом машины, отличающаяся тем, что, с целью повьппе- ния качества и производительности .. гибки и упрощения конструкции, гибочный механизм выполнен в виде кривошипа с выдвижными и неподвижными упорами, боковые щеки которого соединены шарнирными рычагами с поворотнойзажимной скобой, смонтированной на оси, эксцентрично закрепленной в барабанах, при этом на внутренней тор-' цевой поверхности указанной скобы выполнены площадки для взаимодействия с упорами кривошипа, а на станине установлен механизм подъема и про-; дольного перемещения трубы, выполненный в виде самоходной каретки с установленной на ней'рамой,!имеющей возможность перемещения в вертикальной плоскости и снабженной зажимом для трубы.2. Трубогибочная машина по п.I, отличающаяся тем, что направляющее устройство выполнено в виде лотка, установленного с возможностью продольного перемещения на ползуне, смонтированном на винтах в подъемном суппорте, закрепленном на станине и соединенном с'истемой с привог дом суппорта и канатно-блочной стрелой с механизмом подъема и продольного перемещения трубы.1^Ф.»О5^ ел ел
29- „
y 7;/ y y/y//y / /yy / /yVy y//yyx/ ZZZZZy
ч п ч / X Зг .NTTV .. Х. л Ж. У/Ч .
30 S :27/2 :Z /Z:Z
Y// ж///////////////у/// /// /////f 4/////// // /Ж/ /(
Iг 1
392ffJ7 J5
(Z
Q5.L/e. 2
