Изобретение относится к системам автоматического управления и может быть использовано в системах регулирования объектами, параметры которых - неизвестные постоянные или меняющиеся во времени величины. Такими системами являются, например, системы автоматического управления летательными аппаратами, ядерными реакторами, гидромелиоративными сооружениями и т. д.
Наиболее близким техническим решением к предлагаемому является самонастраивающаяся система управления, содержащая объект регулирования, выходы которого соединены с соответствующими входами блока задания коэффициентов, последовательно соединенные блок суммирования, первый умножитель, интегратор, второй умножитель, выход блока суммирования подключен к вторым входам первого и второго умножителей /1/.
Недостатком этой системы является ограниченность функциональных возможностей, связанных с потерей работоспособности системы при работе с нестационарными объектами.
Целью изобретения является расширение функциональных возможностей системы.
Поставленная цель достигается тем, что в систему, содержащую объект регулирования, блок задания коэффициентов, последовательно соединенный блок суммирования, первый умножитель, второй умножитель, к первому и второму входам первого умножителя подключен выход блока суммирования, соответствующие входы которого соединены с соответствующими выходами блока задания коэффициентов, а выходы объекта регулирования соединены с соответствующими входами блока задания коэффициентов, введены второй блок суммирования и дискриминатор знака, причем первый вход второго умножителя соединен с выходом первого умножителя, второй вход второго умножителя соединен с выходом дискриминатора знака, вход которого соединен с выходом первого блока суммирования; выход второго умножителя подключен к первому входу второго блока суммирования, второй вход которого соединен с выходом дискриминатора знака, а выход второго блока суммирования подключен к объекту регулирования.
Вводя в систему второй блок суммирования и дискриминатор знака, получают робастное управление, что обеспечивает условие нормального функционирования системы при нестационарных характеристиках обычного уравнения.
На чертеже представлена блок-схема системы.
Система содержит объект 1 регулирования, блок 2 задания коэффициентов, блок 3 суммирования, первый умножитель 4, второй умножитель 5, второй блок суммирования 6 и дискриминатор знака 7.
Y1. ..,Ym - выходы объекта регулирования, U - скалярное управляющее воздействие, удовлетворяющее уравнению:
U = -γ1sgn(gтy)-γ2(gтy)2sgn(gтy),
где γ1>0,γ2>0 - постоянные,
gT - числовой вектор,
y-m - мерный вектор выходных координат объекта.
Система функционирует следующим образом.
Сигналы с выходов объекта 1 регулирования поступают на соответствующие входы блока 2 задания коэффициентов, который представляет собой блок умножителей. В блоке 2 задания коэффициентов происходит умножение сигнала с i-го выхода объекта регулирования на постоянный коэффициент. Сигналы с выходов блока 2 задания коэффициентов поступают на соответствующие входы блока 3 суммирования, где складываются. Сигналы gTy с выхода блока 3 суммирования поступают на вход дискриминатора знака 7 и на оба входа первого умножителя 4. В первом умножителе 4 происходит умножение сигнала с выхода блока 3 первого суммирования на этот же сигнал. Сигнал (gTy)2 с выхода первого умножителя 4 поступает на первый вход второго умножителя 5. В дискриминаторе знака 7 выбирается знак сигнала. Сигнал sgn(gTy) поступает на второй вход второго умножителя 5, где происходит умножение его на сигнал (gTy)2, поступающий с выхода первого умножителя 4. Полученный сигнал (gTy)2sgn(gTy) поступает с выхода второго умножителя 5, на первый вход второго блока суммирования 6, на второй блок которого <поступает сигнал sgn(gTy) с выхода дискриминатора знака 7. Во втором блоке суммирования 6 происходит сложение сигналов, полученных с выхода второго умножителя 5 и выхода дискриминатора 7 с нужными коэффициентами. Сигнал U = -γ1sgn(gтy)-γ2(gтy)2sgn(gтy) c выхода второго блока суммирования 6 (управляющее воздействие) поступает на вход объекта 1 регулирования.
Данное устройство может быть реализовано промышленным способом на основе стандартной элементной базы.
Источники информации
1. SU 1019400 А, 23.05.1983.
| название | год | авторы | номер документа |
|---|---|---|---|
| РОБАСТНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2000 |
|
RU2178198C1 |
| РОБАСТНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2002 |
|
RU2222040C1 |
| РОБАСТНАЯ СИСТЕМА УПРАВЛЕНИЯ ОБЪЕКТОМ С ЗАПАЗДЫВАНИЕМ | 2000 |
|
RU2170452C1 |
| РОБАСТНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2002 |
|
RU2231818C2 |
| НЕЛИНЕЙНАЯ РОБАСТНАЯ СИСТЕМА УПРАВЛЕНИЯ ДЛЯ НЕСТАЦИОНАРНЫХ ОБЪЕКТОВ | 2003 |
|
RU2251722C1 |
| РОБАСТНАЯ СИСТЕМА ДЛЯ ОБЪЕКТОВ С ЗАПАЗДЫВАНИЕМ ПО УПРАВЛЕНИЮ | 2001 |
|
RU2204858C1 |
| РОБАСТНАЯ СИСТЕМА УПРАВЛЕНИЯ ОБЪЕКТОМ С ЗАПАЗДЫВАНИЕМ | 2002 |
|
RU2220434C1 |
| СИГНАЛЬНО-АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ДЛЯ ОБЪЕКТОВ С ЗАПАЗДЫВАНИЕМ ПО СОСТОЯНИЮ | 2000 |
|
RU2177635C1 |
| РОБАСТНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2008 |
|
RU2379735C2 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 1996 |
|
RU2109317C1 |
Изобретение относится к системам автоматического управления и может быть использовано в системах регулирования объектами, параметры которых - неизвестные постоянные или меняющиеся во времени величины. Технический результат заключается в расширении функциональных возможностей системы за счет работы с нестационарными объектами. Система содержит блок задания коэффициентов, два блока суммирования, два умножителя, объект регулирования, дискриминатор знака. 1 ил.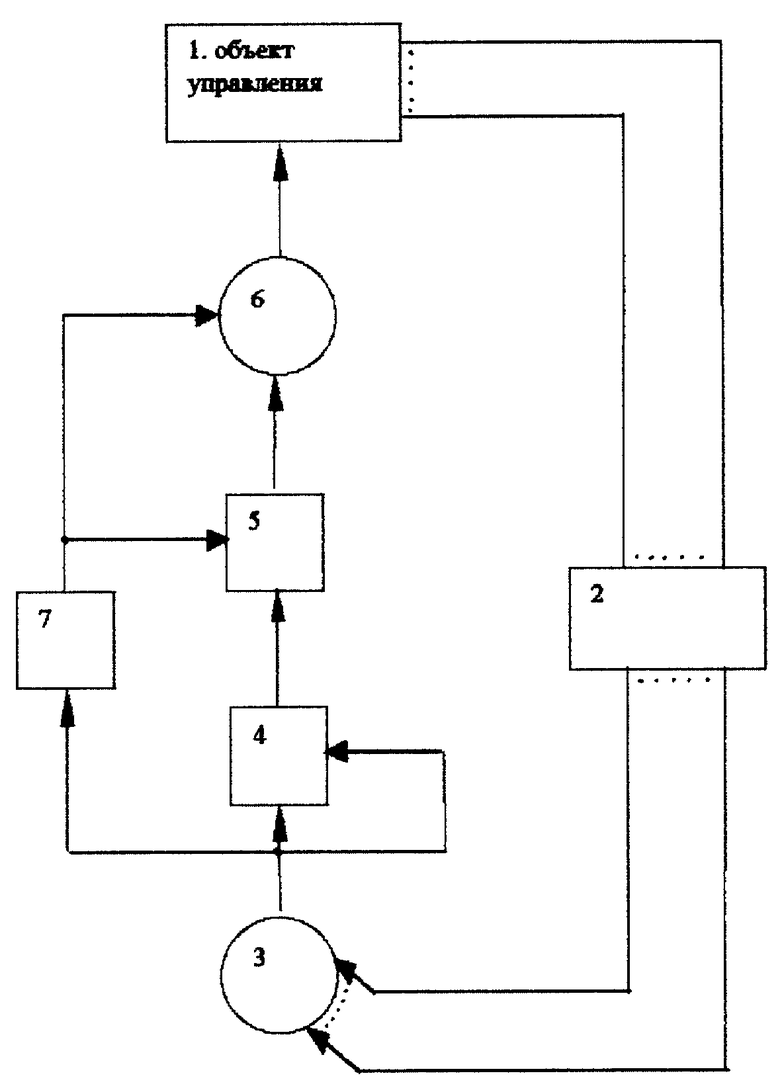
Робастная система управления, содержащая объект регулирования, блок задания коэффициентов, блок суммирования, первый умножитель, второй умножитель, к первому и второму входам первого умножителя подключен выход блока суммирования, соответствующие входы которого соединены с соответствующими выходами блока задания коэффициентов, а выходы объекта регулирования соединены с соответствующими входами блока задания коэффициентов, отличающаяся тем, что в систему введены второй блок суммирования и дискриминатор знака, причем первый вход второго умножителя соединен с выходом первого умножителя, а второй вход второго умножителя соединен с выходом дискриминатора знака, вход которого соединен с выходом первого блока суммирования, выход второго умножителя подключен к первому входу второго блока суммирования, второй вход которого соединен с выходом дискриминатора знака, выход второго блока суммирования подключен к объекту регулирования.
| Самонастраивающаяся система управления | 1982 |
|
SU1019400A1 |
| Самонастраивающаяся система управления | 1982 |
|
SU1105860A1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 1996 |
|
RU2109317C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПЛОТНОСТИ ЭЛЕКТРИЧЕСКОГО ТОКА В ЭЛЕКТРОЛИТИЧЕСКОЙ ЯЧЕЙКЕ | 0 |
|
SU180669A1 |
