Изобретение относится к способу и устройству, обеспечивающим защитную систему для рольставней, солнцезащитных тентов, ворот и т.п.
Известно, что исполнительные системы для рольставней, на которые делаются ссылки в качестве примера, хотя изобретение применимо также для других подвижных барьеров, снабжены защитными устройствами для обнаружения, когда рольставни во время своего движения, в частности движения вниз, ударяются в препятствие. После соударения рольставни приводятся в движение с изменением направления перемещения.
Известны многие решения этого типа. В частности, в одной подгруппе таких решений используется механический зазор, существующий между приводным валом исполнительной системы и роликом, на который наматываются рольставни. В ЕР 0552459 приводится описание исполнительной системы, в которой предусмотрен зазор между двумя зубьями, выступающими из оболочки двигателя (исполнительной системы) и бруском, перпендикулярным стержню, прикрепленному к стене, при этом стержень поддерживает всю исполнительную систему. Брусок снабжен датчиками деформации для обнаружения его деформации и тем самым, опосредованно, нагрузки, действующей на двигатель, из которой получают данные для управления двигателем.
В ЕР 0497711 приведено описание исполнительной системы, в которой колесо свободного хода расположено между валом и роликом. Два концентричных элемента в колесе свободного хода имеют соединенные с ними средства, которые действуют так, что относительное перемещение этих двух элементов при вступлении в действие колеса свободного хода, когда рольставни ударяются в препятствие, вызывают с помощью переключателя, расположенного в контуре электроснабжения двигателя, автоматическое реверсирование направления вращения ролика и мгновенное перемещение снова вверх рольставней.
В FR 272162 приведено описание исполнительной системы, в которой ролик соединен с датчиком, сигнал которого, представляющий угловую скорость ролика, - в данном случае, как и ниже, относительно стационарной части исполнительной системы, которая закреплена на стене, - обрабатывается логическим блоком для определения условий остановки двигателя рольставней. Колесо свободного хода предусмотрено и расположено между двигателем и роликом и снижает скорость ролика до нуля, когда он ударяется в препятствие.
В DE 19610877 приведено описание системы управления для исполнительной системы рольставней, содержащей прижимной брусок. Этот брусок приводится в действие при вращении двигателя, который приводит в движение рольставни, и с помощью датчиков давления, находящихся в контакте с бруском, получают сигнал, используемый для управления исполнительной системой. В частности, сигнал используется для обнаружения препятствия, встречаемого рольставнями.
В DE 19706209 приведено описание системы для измерения изменений веса, действующего на ролик, который несет рольставни, в зависимости от которого выполняется управление приводимой в действие двигателем исполнительной системой (рольставней) и, в частности, остановка двигателя. Для достижения этого результата используется механический переключательный компонент, при этом указанный компонент содержит две части, которые взаимодействуют друг с другом и относительное угловое положение которых (вдоль одной и той же оси) изменяется. Когда рольставни достигают концевого упора или препятствия, то изменяется относительный поворот двух частей, который могут обнаруживать механические переключатели для выполнения управления исполнительной системой.
В US 6215265 приведено описание системы для управления приводимой в действие двигателем исполнительной системы для рольставней, которая измеряет крутящий момент двигателя и останавливает его, когда он превышает заданную максимальную величину крутящего момента, или же после максимального изменения крутящего момента в единицу времени. Дополнительно к этому измеряется скорость валика, и двигатель останавливается при скорости ниже заданной величины скорости (которую можно получать из хранящегося в памяти профиля). Другим характерным признаком является оставление вращательного зазора между валиком и валом двигателя, для использования его в качестве другого средства выключения двигателя. В этой связи дополнительной информации не приводится.
DE 4445978 относится к защитному устройству для рольставней, в котором стационарная часть исполнительной системы закреплена с определенным зазором, обеспечивающим ограниченное угловое перемещение вокруг оси вала (на который наматываются рольставни), и в котором предусмотрен, по меньшей мере, один поворотный прерывающий рычаг с соединенной с ним пружиной. В случае возникновения опасной ситуации пружина оттягивает рычаг к переключателю для создания сигнала неисправности.
Все эти решения имеют недостатки.
Решения, в которых для обнаружения присутствия препятствия управляют потреблением или нагрузкой двигателя, должны основываться на изменении в потреблении или нагрузке, которое вызывается препятствием. Это изменение для приведения в действие защитной системы должно превышать минимальное пороговое значение инициирования, ниже которого все еще возможны опасные ситуации, связанные с ударом. Кроме того, поскольку управляемым (или наблюдаемым) компонентом является двигатель исполнительной системы, то компонент, который в действительности вызывает удар, а именно рольставни, которые иногда имеют значительные размеры, не наблюдается. Особенно трудно управлять двигателями, которые установлены на рольставнях, таких как жалюзи, венецианские шторы или наружные свертывающиеся жалюзи, которые имеют «гармошковую» структуру, в которой изменение нагрузки после соударения с препятствием трудно предсказывать, поскольку оно зависит от самого препятствия и условий соударения. В действительности изменение нагрузки двигателя вызывается деформацией рольставней во время соударения. Кроме того, поскольку оно зависит от характеристик двигателя, то каждую систему необходимо настраивать для специального применения, которые сильно изменяются в зависимости от того, необходимо ли обеспечивать работу жалюзи, навесов, ставней, дверей или проходов, которые имеют разные размеры, вес и характеристики.
В решениях, в которых вместо этого используется механический зазор между роликом и двигателем, может возрастать степень неуверенности во время работы. Когда используется зазор для обеспечения защиты с помощью ползуна, перемещающегося по всей длине зазора для приведения в действие переключателя или аналогичных средств, то необходимо калибровать зазор относительно конкретного применения. Слишком малый зазор может инициировать защиту при отсутствии в действительности препятствия, поскольку рольставни могут встречать на своем пути незначительное сопротивление, такое как создаваемое скопившейся пылью (в частности, со временем) или образованием льда, или же могут просто встречать большее, чем ожидалось, трение, обычно в результате увеличения в размерах вследствие изменений температуры, которые могут возникать в течение дня.
Слишком большой зазор может инициировать защиту, когда весь вес рольставней уже действует на препятствие, что является очень опасным, если, например, препятствие является человеком.
Поэтому следует ожидать трудностей при выполнении надежной системы, которая имеет приемлемые рабочие допуски и одновременно может использоваться в более чем одном применении с целью уменьшения стоимости изменения конструкции и адаптации.
Если механический зазор связан с управлением скоростью валика, то в этом случае также имеются уже указанные проблемы необходимости выбора величины зазора для нахождения компромисса между эффективностью и возможностью стандартизации. Однако в тех случаях, когда предусмотрено управление лишь угловой скоростью валика, с использованием или без использования колеса свободного хода на валике, существует опасность уменьшения скорости и инициирования защиты, лишь когда рольставни уже опасно опираются на препятствие, что является более вероятным, когда рольставни имеют складывающуюся структуру (например, штора с несколькими горизонтальными планками), поскольку кромка рольставней, на которую приходится удар, отделяется от валика.
Когда вместо этого механический зазор используется для опосредованного мониторинга параметров двигателя, то работа в целом исполнительной системы имеет недостатки систем, в которых осуществляется мониторинг лишь параметров самого двигателя. В этом случае механический зазор является не чем иным, как альтернативным датчиком электрической или физической характеристики двигателя.
Целью данного изобретения является создание защитного устройства, которое исключает недостатки уровня техники.
Цель достигается с помощью способа обеспечения защитной системы для барьеров, которые предназначены для перемещения вдоль рабочего пути и приводятся в действие с помощью двигателя, таких как рольставни, ворота или т.п., согласно которому:
- соединяют барьер с зазором с неподвижной частью, так что барьер способен перемещаться по участку перемещения независимо от действия двигателя;
- задают на участке набор безопасных положений, соответствующих безопасному положению барьера;
- определяют на участке перемещения действительное положение барьера относительно неподвижной части;
- предотвращают или реверсируют действие двигателя и/или движение барьера, когда барьер, на участка перемещения, занимает положение, не входящее в набор безопасных положений.
Для реализации способа изобретение предлагает защитное устройство для перемещаемых барьеров, которые могут приводиться в действие с помощью двигателя, таких как рольставни, ворота или т.п., для осуществления способа, содержащее:
- часть, неподвижную относительно перемещения барьера;
- кинематическую цепь, с помощью которой неподвижную часть можно присоединять с зазором к барьеру, при этом барьер способен перемещаться независимо от действия двигателя по участку перемещения;
- обнаруживающее средство для определения на участке перемещения относительного положения неподвижной части и барьера;
- процессорный блок, который получает данные положения из обнаруживающего средства и предотвращает или реверсирует действие двигателя и/или движение барьера, когда барьер, на участке перемещения, занимает положение, не входящее в набор безопасных положений.
Преимущества способа и устройства согласно изобретению следуют более ясно из приведенного ниже описания, которое относится в основном, в качестве примера, к исполнительной системе для рольставней, но комментарии к которой применимы к любому варианту выполнения изобретения, со ссылками на прилагаемые чертежи, на которых:
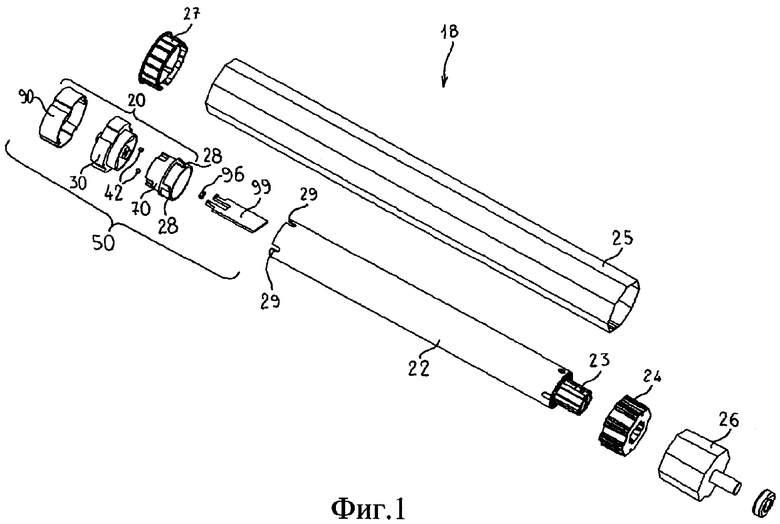
фиг.1 - исполнительная система для рольставней, в изометрической проекции с разнесением деталей;
фиг.2 - устройство согласно изобретению, в изометрической проекции с разнесением деталей;
фиг.3 - один конец исполнительной системы согласно фиг.1, на виде сбоку;
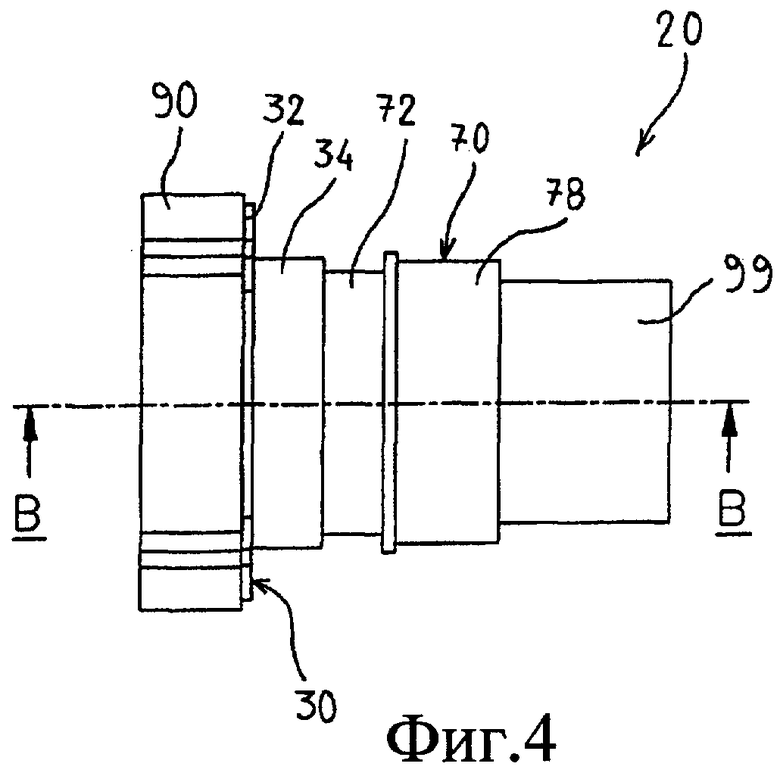
фиг.4 - конец согласно фиг.3, на виде сверху;
фиг.5 - разрез в плоскости В-В на фиг.4;
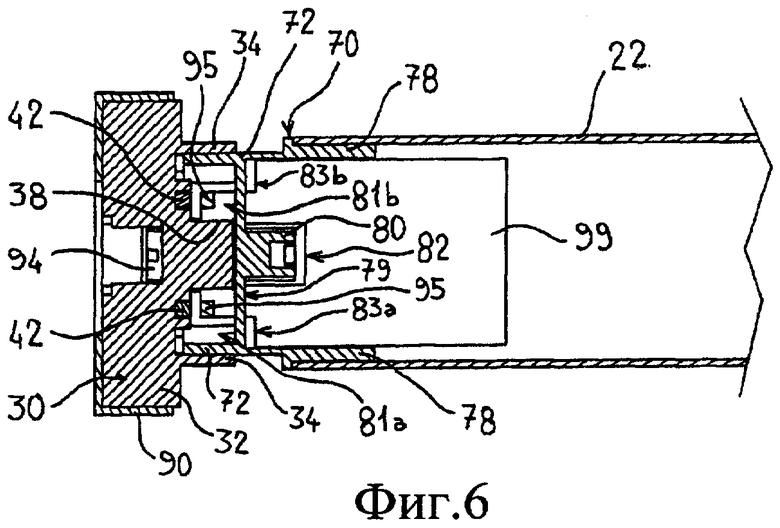
фиг.6 - разрез в плоскости С-С на фиг.3;
фиг.7 - разрез в плоскости А-А на фиг.3 в первом рабочем состоянии;
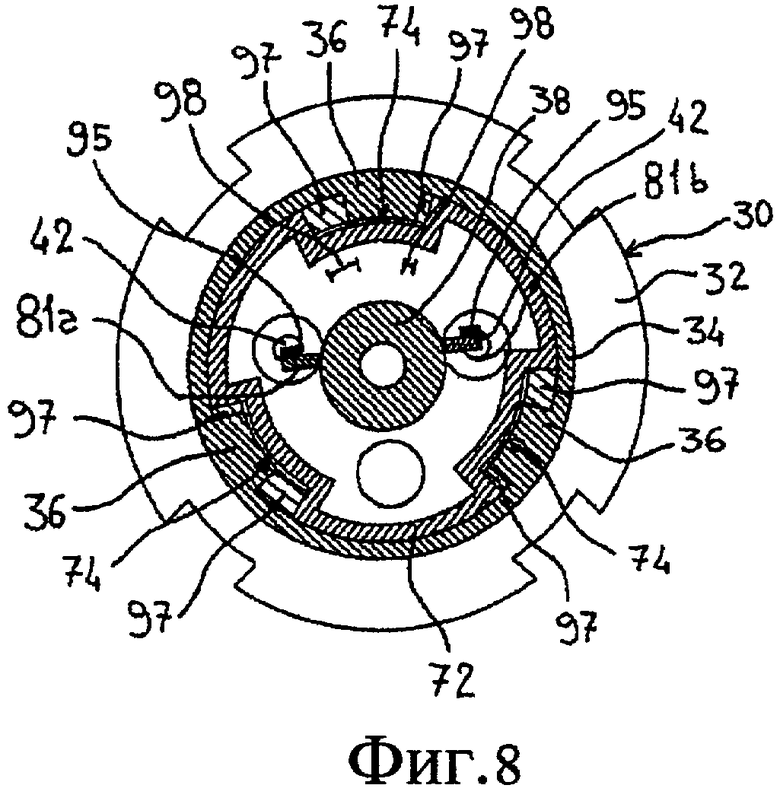
фиг.8 - разрез в плоскости А-А на фиг.3 во втором рабочем состоянии;
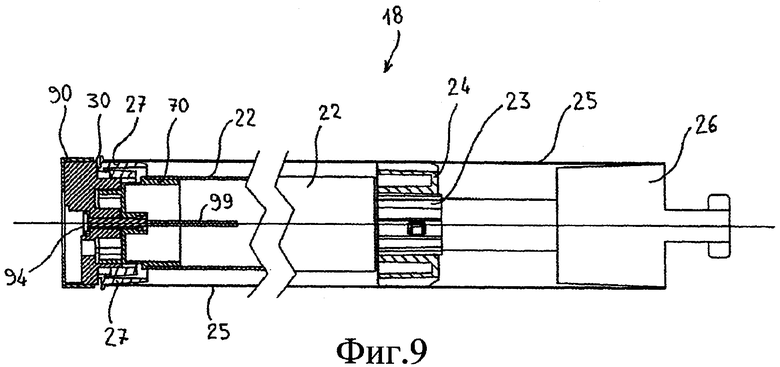
фиг.9 - вертикальный и продольный разрез исполнительной системы согласно фиг.1;
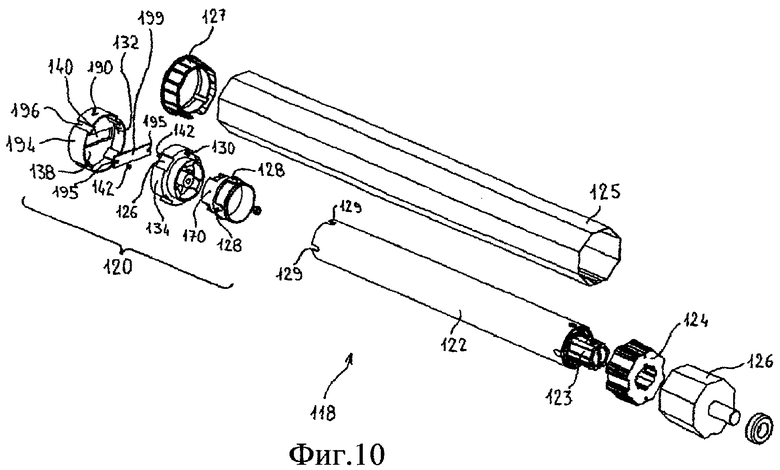
фиг.10 - вторая исполнительная система для рольставней, в разнесенной изометрической проекции;
фиг.11 - второе устройство согласно изобретению, в разнесенной изометрической проекции;
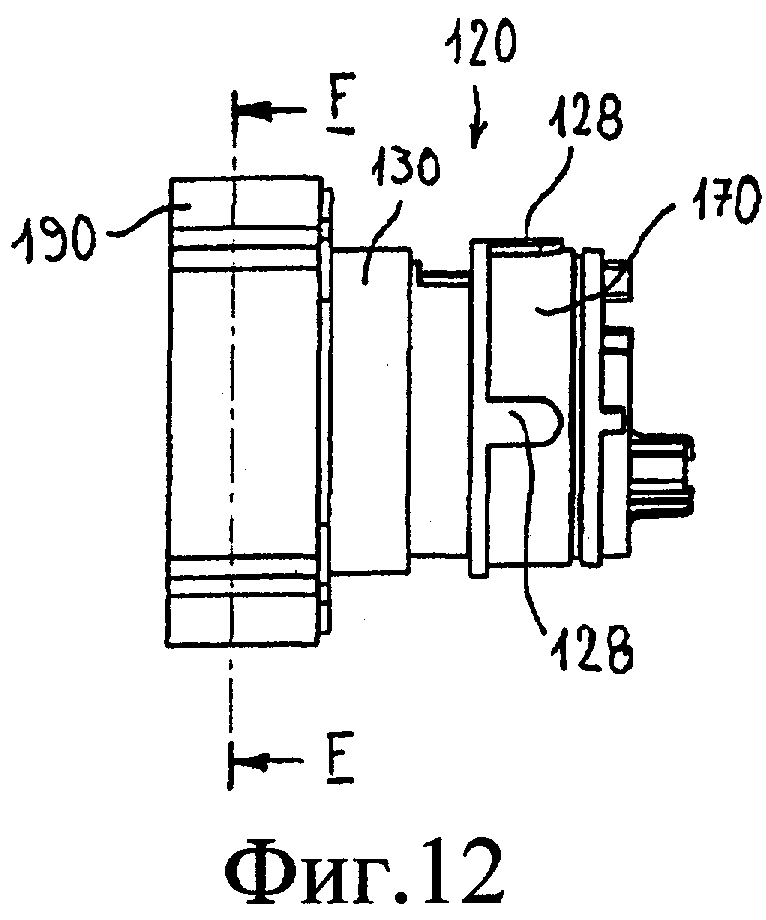
фиг.12 - один конец исполнительной системы согласно фиг.10, на виде сбоку;
фиг.13 - разрез в плоскости F-F на фиг.12 в первом рабочем состоянии;
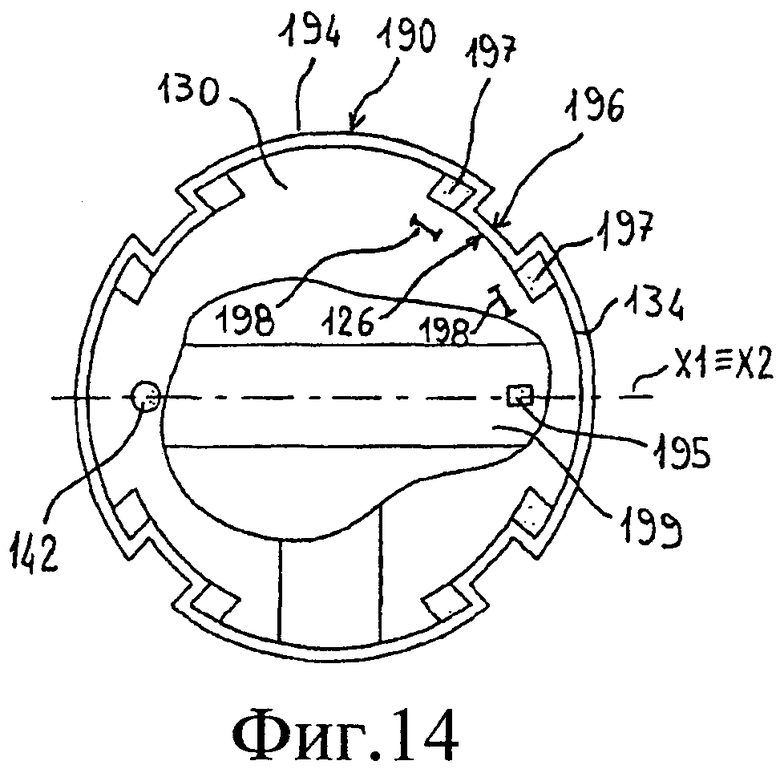
фиг.14 - разрез в плоскости F-F на фиг.12 во втором рабочем состоянии;
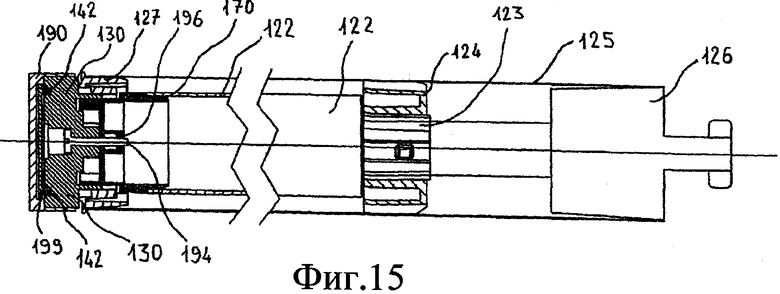
фиг.15 - вертикальный и продольный разрез исполнительной системы согласно фиг.10;
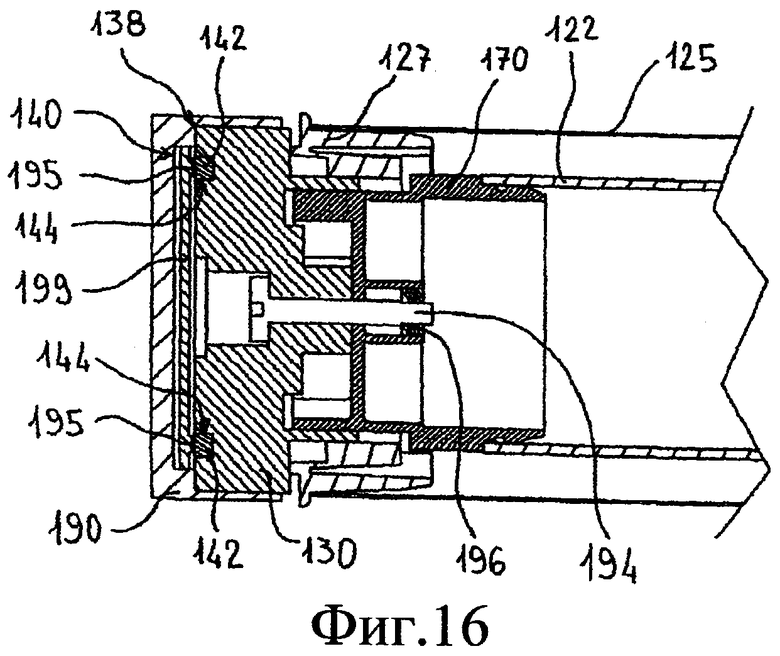
фиг.16 - деталь из фиг.15, в увеличенном масштабе;
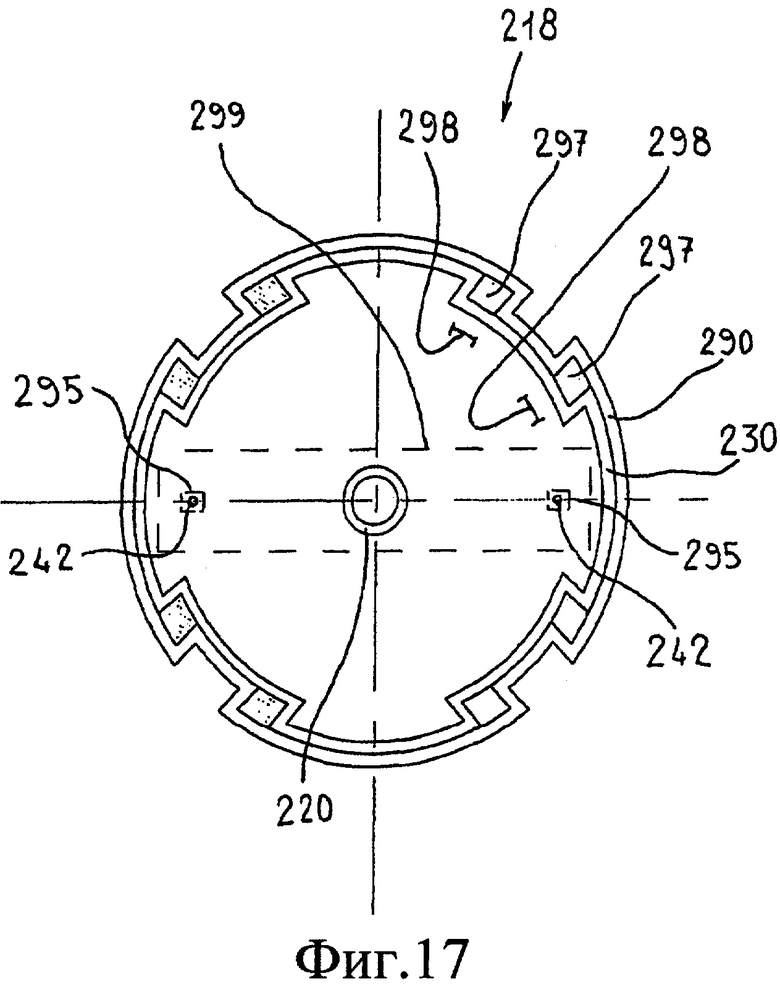
фиг.17 - поперечный разрез вспомогательного устройства согласно изобретению;
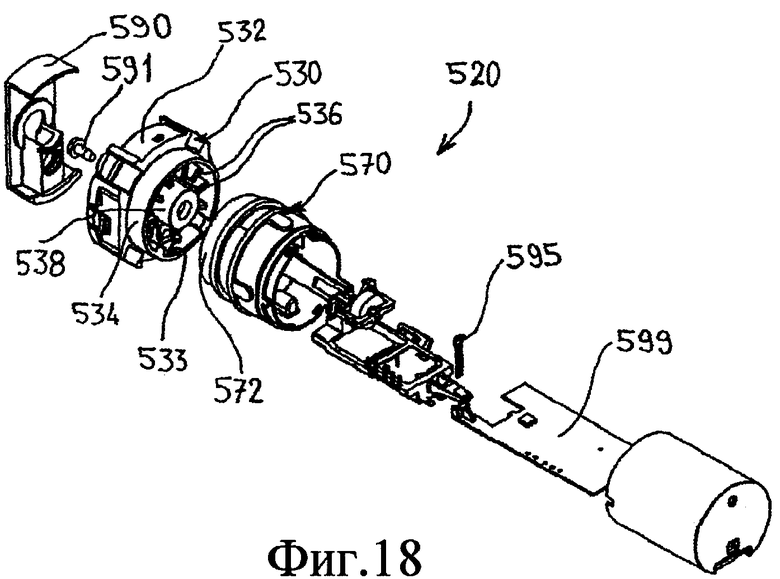
фиг.18 - третье устройство согласно изобретению для исполнительной системы для рольставней, в разнесенной изометрической проекции;
фиг.19 - устройство согласно фиг.18, в другой разнесенной изометрической проекции;
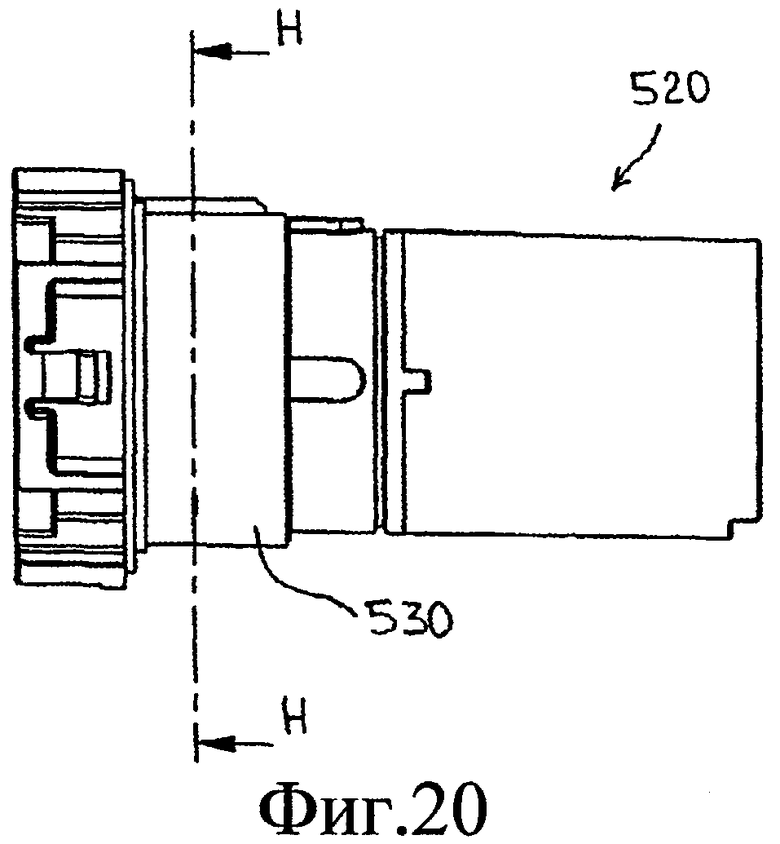
фиг.20 - устройство согласно фиг.18, в собранном состоянии, на виде сбоку;
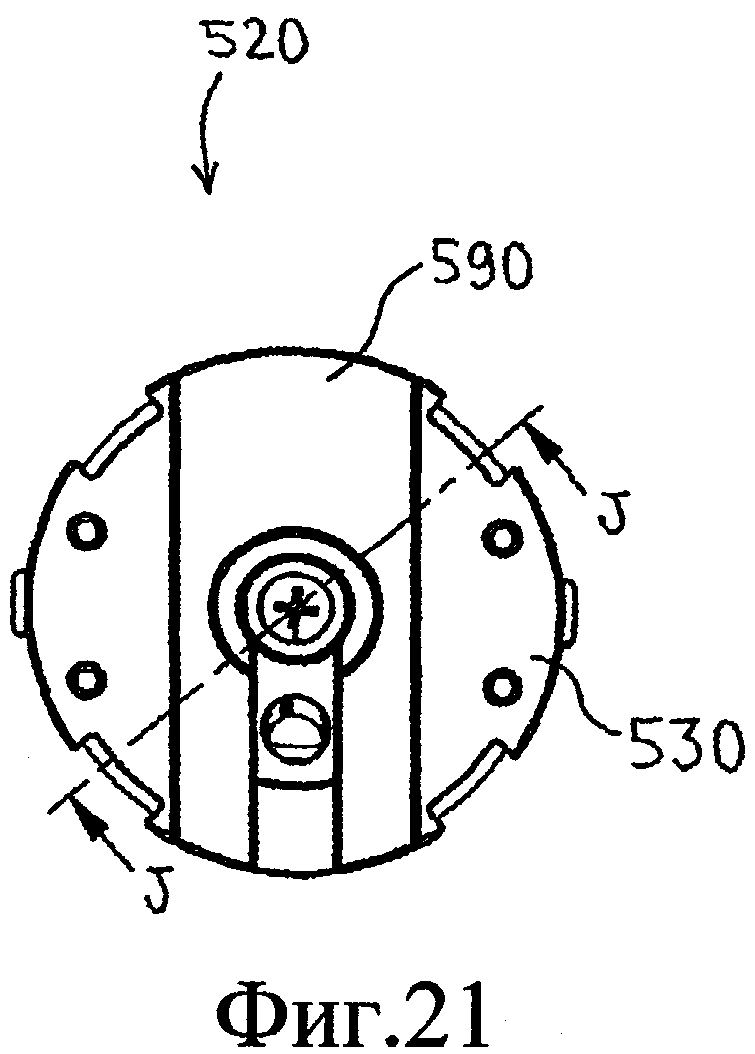
фиг.21 - разрез в плоскости Н-Н на фиг.20;
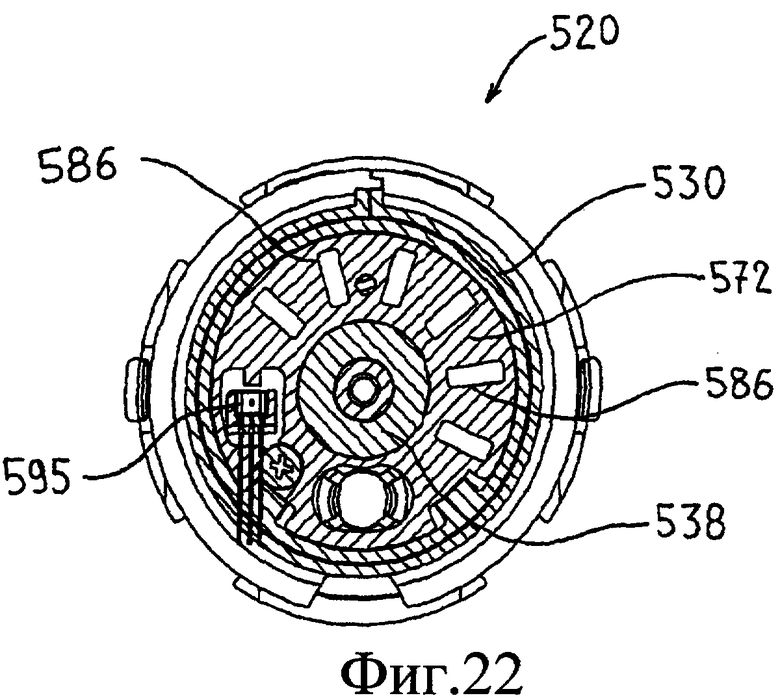
фиг.22 - разрез в плоскости J-J на фиг.21;
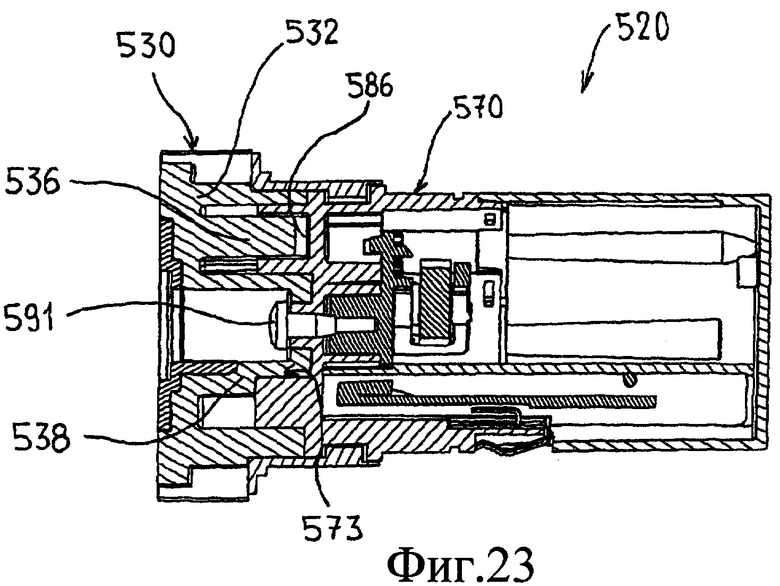
фиг.23 - поперечное сечение разреза J-J на фиг.21.
На фиг.1, 18 показана исполнительная система для рольставней, состоящая из:
- устройства 50 для осуществления способа, согласно изобретению, соединенного с концевой группой 20;
- трубчатого тела 22, которое:
- на одном конце содержит двигатель и все устройства для его работы (не изображены), выходной вал которого соединен с шестерней 23, введенной внутрь зубчатого адаптера для валика 25 (на который наматываются рольставни (не изображены)); валик 25 расположен над трубчатым телом 22 в коаксиальном положении;
- на другом конце оно соединено с вращающейся частью 70 с помощью принудительного сцепления между рельефами 28 на вращающейся части 70 и соответствующими выемками 29 на трубчатом теле 22;
- имеющего форму призмы опорного тела 26, которое закреплено с возможностью поворота на стене и с которым сцеплен один конец валика 25, при этом металлическое кольцо 27 введено в другой конец валика 25.
Устройство согласно изобретению показано отдельно и более детально на фиг.2. Оно содержит базовую часть 30 и вращающуюся часть 70, имеющую по существу круглое поперечное сечение, электронную плату 99 и стенной кронштейн 90. Кронштейн крепится на стене и базовая часть 30 располагается внутри него. Трубчатое тело 22 вводится внутрь валика 25 рольставней.
Базовая часть 30 действует в качестве неподвижного основания, на котором вращающаяся часть 70 способна поворачиваться на ограниченном участке углового перемещения, амплитуда которого задается механическим зазором между ними. Для этого базовая часть 30 содержит цилиндрическое основание 32, из которого выступает круговой выступ 34, который имеет на своей внутренней стороне в полости 33 три идентичных зубца 36, которые расположены со сдвигом на 120° радиально относительно центра выступа 34, где имеется полый цилиндрический рельеф 38, который имеет высоту, одинаковую с выступом 32. Два идентичных круговых седла 40 расположены на дне рельефа 38 и содержат два идентичных магнита 42 с соответствующими размерами.
С помощью винта 94, затягиваемого гайкой 96, который проходит внутри рельефа 38, базовая часть 30 соединена с возможностью поворота с вращающейся частью 70, которая также имеет круговой выступ 72, но с диаметром, меньшим диаметра выступа 34, для обеспечения точного вхождения внутрь его и вращения с фрикционным контактом. Выступ 72 напротив зубцов 36 углублен в направлении центра с образованием трех идентичных вогнутостей 74 с дуговым дном и шириной, превышающей ширину зубцов 36, так что при вращении вращающейся части 70 относительно базовой части 30 зубцы перемещаются внутри вогнутостей 74.
Выступ 72 в зоне вогнутости 74 заканчивается плечом 76 или продолжается непосредственно с круговой кромкой 78 от поверхности 79 дна, из которой (см. фиг.5 и 6) в центре выступает полая цилиндрическая распорка 80, внутри которой содержится гайка 96 и часть корпуса винта 94. За счет затягивания винта 94 не очень плотно с использованием гайки 96 вращающаяся часть 70 упирается в рельеф 38 и способна вращаться внутри базовой части 30 без отсоединения от нее. Разница по ширине между зубцами 36 и вогнутостями 74 задает ограниченный угловой участок перемещения (зазор), обозначенный позицией 98, вдоль которого вращающаяся часть 70 способна перемещаться внутри базовой части 30.
Поверхность 79 дна имеет диаметральную прорезь, внутрь которой вводится и удерживается печатная плата 99 (изображена схематично) с помощью своих вилкообразных концов 82 с двумя сторонами 81а, 81b, поэтому две стороны 81 а, b плотно окружают распорку 80 и проходят за поверхность 79 дна в пространство, окруженное выступом 34 (см. фиг.5 и 6, где для облегчения понимания трубчатое тело 22, не изображенное на фиг.3 и 4, также разрезано). Концы сторон 81 а, b поддерживают каждая датчик 95 Холла, который располагается после введения печатной платы напротив магнита 42. Следует отметить, что печатная плата показана очень схематично, но она содержит все логические компоненты, компоненты обработки сигналов и соединения, необходимые для функций, описание которых будет приведено ниже. Кроме того, для повышения чувствительности системы магниты 42 направлены так, что полюс их магнитного поля направлен к датчикам 95.
Внутрь участка 98 могут быть предпочтительно введены упругие средства 97, например пружина или резиновая часть, для упругого толкания вращающейся части 70 в нулевое опорное угловое положение, в котором каждый зубец 36 расположен приблизительно в центральном положении относительно ширины соответствующей вогнутости 74 (см. фиг.7), при этом такое состояние достигается, когда не установлена исполнительная система 18 для рольставней. После установки исполнительной системы 18 для рольставней положение зубцов 36 относительно соответствующей вогнутости 74 определяется в основном результатом одновременного действия силы тяжести рольставней и противодействующей силы со стороны упругих средств 97. Кроме того, присутствует также действие любого трения или сопротивления, встречаемого рольставнями во время их движения и которые могут в действительности изменяться в течение срока службы рольставней, которое должно попеременно складываться или вычитаться из действия силы тяжести рольставней. За счет изменения коэффициента упругости средств 97 (или их размера) можно оптимизировать чувствительность системы, предотвращая неправильные сигналы тревоги или ошибочные сигналы, передаваемые датчиками 95.
Ниже приводится описание работы устройства 50 со ссылками на фиг.7, 8 и 9.
Исполнительная система 18 содержит кинематическую цепь, состоящую из следующих компонентов:
- валик 25 соединен с двигателем исполнительной системы через адаптер 24 и шестерню 23;
- двигатель соединен с трубчатым телом 22 (с жестким размещением внутри него), и трубчатое тело соединено с вращающейся частью 70.
Во время вращения валика 25 рольставни наматываются или сматываются с валика 25. Поэтому момент, оказываемый весом рольставней на валик 25, изменяется и передается через кинематическую цепь на вращающуюся часть 70, которая принимает определенное угловое опорное положение внутри участка 98 зазора. Это положение является результатом действия момента, создаваемого весом рольставней на валике 25, и противоположной силой упругого средства 97, к которому опосредованно прикладывается момент двигателя (управление двигателем осуществляется так, что он вращается с практически постоянной угловой скоростью для перемещения рольставней с постоянной скоростью).
Если рольставни встречают препятствие и останавливаются или в любом случае замедляют движение, то относительное угловое положение вращающейся части 70 и базовой части 30 изменяется, и датчики 95 мгновенно обнаруживают это изменение. Это поясняется со ссылками на фиг.7 и 8, где показаны два разных угловых положения вращающейся части 70 относительно базовой части 30.
В угловом положении вращающейся части 70, показанном на фиг.7, два датчика 95 измеряют сильное магнитное поле (обусловленное близостью магнитов 42). Когда вращающаяся часть 70 поворачивается, как показано на фиг.8, магнитное поле в пространстве, занимаемом датчиками 95, уменьшается, так же как выходной сигнал датчика, и анализируется с помощью платы 99. Понятно, что в целом для каждого угла, занимаемого вращающейся частью 70 внутри участка 98 зазора, магнитное поле, измеряемое датчиком 95, и поэтому его выходной сигнал, являются различными и однозначно связанными с угловым положением вращающейся части 70 (подходящие экранирующие системы (не изображены) исключают любые помехи снаружи системы).
Плата 99 обрабатывает сигнал датчиков 95 для выделения информации об угловом положении вращающейся части внутри участка 98. Одновременно плата может получать информацию о текущем положении рольставней (измеряемую, вычисляемую или оцениваемую с помощью устройств известного типа, обычно кодирующих устройств, связанных непосредственно с двигателем внутри трубчатого тела 22 или с валиком 25).
Во время работы исполнительной системы 18, когда рольставни движутся, можно измерять сигнал, который соответствует текущему угловому положению вращающейся части 70 внутри участка 98. Этот сигнал можно считывать и сохранять для получения кривой отклика (RC), а именно очень компактную последовательность данных, которые соответствуют различным положениям, занимаемым вращающейся частью 70 внутри участка 98 зазора. Каждая выборка может быть связана с каждым из моментов времени или с действительным положением рольставней во время их движения по рабочему пути.
Все это позволяет получать, по меньшей мере, два предпочтительных рабочих режима:
i) можно задавать набор безопасных положений, состоящий просто из диапазона положений вращающейся части 70 внутри участка 98 зазора. Каждое положение вне этого диапазона рассматривается как сигнал опасности и осуществляется соответствующее управление исполнительной системой. Поэтому защита состоит в работе «ступенчатого» типа, но может адаптироваться с помощью программируемого запаса свободного хода с целью учета допусков во время работы.
ii) во время установки, с целью согласования исполнительной системы 18 со специальной рабочей ситуацией, или после установки, если считается, что некоторые рабочие условия изменяются значительно и необходимо изменить конфигурацию системы, то исполнительная система, которая установлена в устройстве 50, может выполнять стадии адаптации, во время которых:
- рольставни выполняют один или несколько циклов открывания/закрывания по рабочему пути;
- одновременно выполняются выборки относительного углового отклонения базовой части 30 и вращающейся части 70, при необходимости усредняются и/или фильтруются и сохраняются в памяти платы 99. Полученная таким образом кривая отклика (RC) для углового отклонения соответствует специальному рабочему условию, при котором данные выборок связываются с положением рольставней;
- задается величина допуска Т, которую необходимо добавлять к RC для учета небольших вариаций, - которые не существенны для целей безопасности, - связанных изменяемым и непредсказуемым образом с путем рольставней;
- затем RC и допуск Т сохраняются в подходящей энергонезависимой памяти (не изображена).
Во время последующей работы исполнительной системы 18 измеряется текущее положение рольставней на рабочем пути и соответствующее текущее угловое отклонение вращающейся части 70, и это отклонение сравнивается с точкой RC+T (которая соответствует набору безопасных положений), относящейся к текущему положению, и если превышены ограничительные значения допуска Т, то плата 99 инициирует защиту, например, посредством реверсирования направления вращения двигателя или вызывая его остановку и включая сигнал опасности.
Предпочтительно можно сохранять набор положений барьера на рабочем пути. Таким образом, можно связывать взаимно однозначно набор безопасных положений с набором положений барьера вдоль рабочего пути, а именно рассматривается множество точек вдоль рабочего пути, и величина углового отклонения связывается с каждым элементом набора безопасных положений. Когда барьер достигает точку, принадлежащую к набору положений вдоль рабочего пути, то текущее угловое отклонение сравнивается с соответствующей величиной, имеющейся в наборе безопасных положений, и в соответствии с этим выполняется действие.
Процесс самообучения может запускаться пользователем или выполняться автоматически исполнительной системой периодически.
Другим преимуществом изобретения является то, что за счет непрерывного и точка за точкой измерения относительного углового отклонения базовой части 30 и вращающейся части 70 - этот параметр указывает сопротивление, встречаемое рольставнями на пути их движения - можно связывать с различными угловыми положениями вращающейся части 70 внутри участка 98 один или несколько предельных пороговых значений инициирования или различные величины RC+T внутри памяти, соответствующих различным опасным ситуациям. Эти пороговые значения не являются фиксированными, а могут устанавливаться очень просто в каждом случае (посредством конфигурации электронной платы 99, предпочтительно с помощью программного обеспечения), в зависимости от применения и рабочих условий указанного применения.
На основе различных уровней пороговых значений или допусков, которые программируются и хранятся в электронной плате, можно во время установки определять режим поведения системы в зависимости от окружения. Например, можно устанавливать «уровень 1» (низкой чувствительности), когда допуск Т равен 20%, поскольку рольставни используются в промышленной обстановке, «уровень 2», когда допуск Т составляет 15%, поскольку рольставни используются на окне квартиры, «уровень 3», когда допуск Т составляет 10%, поскольку рольставни используются на двустворчатом окне, доходящем до пола, которые часто используются в домах, «уровень 4» (высокой чувствительности), когда допуск Т составляет 5%, поскольку рольставни используются в специальном окружении, таком как детские учреждения или магазины. Очевидно, что эти уровни можно также использовать для применений в конкретных климатических условиях, когда имеется лед или часто происходят большие изменения температуры.
Поэтому механические характеристики устройства 50 не изменяются, даже когда изменяются его функциональные возможности, что позволяет легко осуществлять его массовое производство. Возможность адаптации устройства 50 к каждой рабочей ситуации рольставней или даже к изменениям, являющимся результатом старения или изменений окружения, встречающимся во время движения, эффективно компенсируются в режиме реального времени. Адаптация может осуществляться пользователем, который может по желанию перепрограммировать пороговые значения инициирования, или автоматически с использованием указанного выше процесса самообучения.
Защитное устройство 50 может получать электроснабжение также от батареи и/или может быть снабжено беспроводной передающей системой (например, радиочастотной, инфракрасной или типа Bluetooth) для сигнализации, предпочтительно в удаленный приемный компонент, опасного состояния или передачи углового отклонения. В качестве альтернативного решения возможно применение интегрированной сети и/или средств быстрого соединения.
Очевидно, что для измерения относительного углового смещения базовой части 30 и вращающейся части 70 можно использовать другие преобразователи, такие как потенциометр, оптическая система, дополнительный кодер и т.д.
Исполнительная система, которая содержит второе устройство, согласно изобретению показана на фиг.10 и обозначена позицией 118. Она состоит из:
- устройства для осуществления способа, согласно изобретению, связанного с концевой группой 120;
- трубчатого тела 122, которое:
- на одном конце содержит двигатель и все устройства для его работы (не изображены), выходной вал которого соединен с шестерней 123, введенной внутрь зубчатого адаптера 124 для валика 125 (на который наматываются рольставни (не изображены), при этом указанный валик расположен над трубчатым телом 122 в коаксиальном положении;
- на другом конце оно соединено с соединителем 170 с помощью принудительного сцепления между рельефами 128 на соединителе 170 и соответствующими выемками 129 на трубчатом теле 122;
- имеющего форму призмы опорного тела 126, которое закреплено с возможностью поворота на стене и с которым сцеплен один конец валика 125, при этом металлическое кольцо 127 введено в другой конец валика 125.
Концевая группа 120 показана отдельно и более детально на фиг.11 и 12. Она содержит базовую часть 130, соединитель 170 и стенной кронштейн 190. Кронштейн закрепляется на стене, и базовая часть 130 размещается в нем. Трубчатое тело 122 вводится внутрь валика 125 рольставней.
Базовая часть 130, как показано на фиг.15 и 16, соединена с соединителем 170 с помощью сквозного винта 194, затягиваемого гайкой 196 и проходящего через эти две части.
Базовая часть 130, как показано на фиг.13 и 14, на которых для простоты показаны лишь некоторые позиции, имеет поперечное сечение в виде креста с четырьмя одинаково округленными сторонами 134, которые имеют каждая между ними зону 126, углубленную в направлении центра и принимающую соответствующую полость 132 кронштейна 190, имеющую соответствующий профиль. Полость 132 также имеет поперечное сечение в виде креста с четырьмя одинаковыми округленными сторонами 194, между которыми имеется зона 196, углубленная в направлении центра. Длина углубленных зон 196 проходит по дуге, которая меньше дуги углубленных зон 126, и поэтому получается взаимный поворотный механический зазор 198 между кронштейном 190 и базовой частью 130 (которая имеет функцию поворотной части). Этот поворотный зазор 198 имеет угловую амплитуду, которая равна разнице между величинами ширины углубленных зон 126 и 196.
Базовая часть 130 при вхождении в кронштейн 190 соприкасается с дном полости 132, которое обозначено позицией 138. Дно 138 снабжено прямоугольной канавкой 140, внутри которой расположена электронная плата 199; когда базовая часть 130 вставлена в полость 132, то два круглых седла 144 в базовой части 130, содержащие магниты 142, располагаются напротив указанной платы. Плата 199 содержит датчик 195 Холла, который расположен напротив каждого магнита 142. Следует отметить, что плата показана очень схематично, но может содержать все логические элементы, компоненты обработки сигналов и соединения, необходимые для функций, описание которых приведено ниже. Кроме того, для увеличения чувствительности системы, магниты 142 направлены так, что один полюс их магнитного поля направлен к датчикам 195.
Предпочтительно, так же, как и в предыдущем устройстве, можно вводить внутрь углового зазора 198 упругое средство 197, для упругого толкания базовой части 130 и тем самым соединителя 170 в нулевое опорное угловое положение. Комментарии, приведенные в связи с первым устройством, применимы также и в этом случае и поэтому не повторяются.
Ниже приводится описание работы второго устройства со ссылками на фиг.10-16. Исполнительная система 118 содержит кинематическую цепь, состоящую из следующих компонентов:
- валика 125, интегрированного с двигателем исполнительной системы через адаптер 124 и шестерню 123;
- двигателя, интегрированного в трубчатое тело 122 (жестко размещенного внутри тела), при этом трубчатое тело интегрировано с соединителем 170, который, в свою очередь, интегрирован с базовой частью 130.
Во время вращения валика 125 рольставни наматываются на него или сматываются с валика 125. Поэтому момент, оказываемый весом рольставней на валик 125, может изменяться и передается через кинематическую цепь на базовую часть 130, которая принимает определенное угловое опорное положение внутри участка 98 зазора. Это положение является результатом действия момента, создаваемого весом рольставней на валике 125, и противоположной силой упругого средства 197, к которому опосредованно прикладывается момент двигателя (управление двигателем осуществляется так, что он вращается с практически постоянной угловой скоростью для перемещения рольставней с постоянной скоростью).
Если рольставни встречают препятствие и останавливаются или в любом случае замедляют движение, то относительное отклонение углового положения базовой части 130 и кронштейна 190 изменяется, и датчики 95 мгновенно обнаруживают это изменение. Это поясняется со ссылками на фиг.13 и 14, где показаны два разных угловых положения базовой части 130 относительно кронштейна 190 в качестве примера. В угловом положении соединителя 170, показанном на фиг.14, два датчика 195 измеряют сильное магнитное поле, обусловленное близостью магнитов 142. Две оси Х1 и Х2, которые проходят, соответственно, через два датчика 195, и два магнита 142 расположены поверх друг друга. Когда вращающаяся часть (соединитель) 170 поворачивается, как показано на фиг.13, где две оси Х1 и Х2 наклонены относительно друг друга на определенный угол, магнитное поле в пространстве, занимаемом датчиками 195, уменьшается, так же, как выходной сигнал датчика, и анализируется с помощью платы 199. Понятно, что в целом для каждого угла, занимаемого базовой частью 130 внутри участка 198 зазора, магнитное поле, измеряемое датчиками 195 и поэтому их выходной сигнал, являются различными и однозначно связанными с угловым положением базовой части 130 относительно кронштейна 190 (подходящие экранирующие системы (не изображены) исключают любые помехи снаружи системы).
Плата 199 обрабатывает сигнал датчиков 195 для выделения информации об угловом положении базовой части 130 внутри участка 198. Одновременно плата 199 может получать информацию о текущем положении рольставней (измеряемую, вычисляемую или оцениваемую с помощью устройств известного типа, обычно кодирующих устройств, связанных непосредственно с двигателем внутри трубчатого тела 122 или с валиком 125).
С помощью исполнительной системы 118 можно осуществлять те же два процесса управления, обозначенные как i) и ii) (регулируемая ступенчатая работа или получение RC для углового положения базовой части 130, задание допуска Т и т.д.), описание которых приведено выше применительно к исполнительной системе 18, с теми же преимуществами, повторение которых не приводится. Точно так же можно использовать для исполнительной системы 118 конструктивные возможности, описание которых было приведено применительно к исполнительной системе 18.
Защитное устройство согласно изобретению можно предпочтительно выполнять также отдельно от исполнительной системы, и поэтому также внешние вспомогательные устройства, которые можно при необходимости добавлять к исполнительной системе, обеспечивают значительную экономию средств относительно как изготовления, так и складского хранения.
Вспомогательное устройство этого типа показано в поперечном разрезе на фиг.17 и обозначено позицией 218. Электронная плата 299 и датчики 295, закрепленные на нем, вставляются в подходящее посадочное место, образованное в неподвижном наружном диске 290, с которым коаксиально соединен с возможностью поворота внутренний диск с помощью заклепки 220 с отверстием. Можно видеть, что поперечные сечения двух дисков 290, 230 имеют одинаковую форму с кронштейном 190 и базовой частью 130 соответственно и обеспечивают идентичный размер поворотного механического зазора 298 с угловой амплитудой, равной разнице между величинами ширины окружных углубленных зон на двух дисках, так же, как в случае исполнительных систем 18 и 118. Функция двух дисков 290, 230 идентична функциям кронштейна 190 и базовой части 130 в исполнительной системе 118 и базовой части 130 и вращающейся части 70 в исполнительной системе 18: угловое положение внутреннего диска 230 относительно наружного диска измеряется с помощью двух датчиков 295, которые расположены на наружном диске и которые измеряют магнитное поле двух магнитов 242, расположенных на внутреннем диске напротив датчиков 295. Между двумя дисками 290, 230 можно размещать упругое средство 297 с той же целью, что и указана выше для средств 97 и 197.
Функциональные свойства, преимущества и конструктивные возможности для вспомогательного устройства 218 одинаковы с указанными выше для исполнительных систем 18 и 118, и поэтому их повторное описание для краткости не приводится. Очевидно, что для обеспечения управления с учетом препятствий рольставнями в исполнительной системе, которая не имеет защитного устройства, согласно изобретению достаточно установить вспомогательное устройство 218 с использованием его вместо стенного кронштейна исполнительной системы. Исполнительную систему необходимо прикреплять к внутреннему диску 230, в то время как наружный диск 290 крепится на стене. Вспомогательное устройство может содержать лишь наружный диск 290 с интегрированной платой 299, без внутреннего диска 230, вместо которого в диск 290 вводится концевая группа исполнительной системы, подлежащей управлению. Магниты устанавливаются на концевую группу исполнительной системы с возможностью взаимодействия с датчиками платы, присутствующей на наружном диске.
Кроме того, может отсутствовать также плата 299, при этом она расположена либо в удаленном положении, либо уже предусмотрена в исполнительной системе, которая может быть выполнена и/или перепрограммирована с возможностью обработки сигнала, поставляемого вспомогательным устройством.
Для указанных выше устройств имеется другая возможность применения, состоящая в установке с предварительно установленными кривой отклика RC и допуском Т, например, в случае стандартизованного применения. В качестве свободного соединения, дополнительно к указанному зазору, можно использовать другие соединительные системы, например, зазор между зубчатым колесом и зубчатой рейкой, или линейный зазор вместо углового зазора, как в указанных вариантах выполнения, или их комбинации. Кроме того, барьер может быть непосредственно соединен с вращающейся частью без промежуточного расположения указанной кинематической цепи; возможным примером может быть приводное корончатое колесо, которое находится в зацеплении с зазором с зубчатой рейкой, расположенной продольно и соединенной с воротами для перемещения их вперед и назад.
Даже зазор, результирующийся из допусков сборки и изготовления, можно использовать в изобретении. В требующих точности применениях или если желательно, можно применять нулевой допуск, т.е. Т=0. Другой вариант выполнения относится к форме частей, которые задают угловой зазор, от их формы до количества выступов и углубленных зон для задания углового зазора, или их расположения (на неподвижной части или вращающейся части). Другой вариант выполнения относится к числу магнитов и датчиков магнитного поля или к их расположению. Другой вариант выполнения относится к выполнению системы управления для исполнительной системы: в данном случае было приведено описание цифровой управляющей системы, однако можно также использовать любую аналогичную технологию обработки и хранения сигналов.
Третье устройство согласно изобретению показано на фиг.18. Оно содержит головку (или концевую группу) 520, в то время как другие компоненты исполнительной системы, которые не изображены, являются аналогичными ранее указанным системам 18 и 118, так что их описание для краткости не приводится.
Головка 520 содержит, как и прежде, базовую часть 530 и вращающуюся часть 570, имеющие по существу круглое поперечное сечение, электронную печатную плату 599 с датчиками 595 (которые работают идентично указанным выше) и стенной кронштейн 590. Последний крепится на стене, и базовая часть 530 соединяется с ним. Как и прежде, базовая часть 530 действует в качестве неподвижного основания, на котором вращающаяся часть 570 способна поворачиваться на ограниченном участке углового перемещения. Головка 520, на которую распространяются все технические соображения и принципы работы, указанные для систем 18 и 118, отличается от предыдущих систем выполнением упругого средства между вращающейся частью 570 и базовой частью 530.
Ниже приводится для краткости описание лишь этого упругого средства и относящихся к нему элементов. Остальная часть системы аналогична другим системам.
Базовая часть 530 содержит цилиндрическое основание 532, из которого выступает круговой выступ 534, который имеет на внутренней стороне полость 533, набор идентичных гибких ребер 536 (лишь некоторые снабжены номером) прямоугольного поперечного сечения, которые расположены радиально относительно центра выступа 534, где имеется полый цилиндрический рельеф 538, имеющий ту же высоту, что и выступ 532.
При затягивании винта 591 с помощью гайки (не изображена), которая входит внутрь рельефа 538, базовая часть 530 соединяется с возможностью вращения с вращающейся частью 570, которая также имеет круговой выступ 572, но с меньшим диаметром, чем выступ 534, так что он точно входит внутрь него и вращается с контактом без трения.
Выступ 572 снабжен рядом идентичных щелей 586 (лишь некоторые снабжены номером) прямоугольной формы, которые расположены радиально относительно центра выступа 534, где имеется цилиндрическая полость 573. Радиальное расположение и размеры щелей 586 соответствуют расположению и размерам ребер 536, так что каждое из ребер 536 может входить в соответствующую щель 586, необязательно, с небольшим зазором, когда вращающаяся часть 570 введена в базовую часть 530 (рельеф 538 установлен внутри полости 573).
Зазор относительного поворота части 570 по отношению к базовой части 530 может определяться двумя факторами: во-первых, необязательным взаимным механическим зазором между ребрами 536 и щелями 586 (ребра уже щелей и перемещаются в них), и, во-вторых, гибкостью ребер 536. С зазором или без зазора, когда часть 570, подвергаемая кручению, поворачивается достаточно относительно базовой части 530, то ребра 536 начинают изгибаться. Это изгибание имеет два следствия: (i) оно задает механический зазор между частью 570 и базовой частью 520 и (ii) оно обеспечивает противодействующую силу, способную выдерживать чрезмерное скручивание части 570 и упруго возвращать часть 570 обратно в первоначальное угловое положение, когда скручивание равно нулю.
Понятно, что форма и материал ребер 536 выбираются такими, чтобы надежно выдерживать максимальное ожидаемое скручивание при одновременном желаемом эластичном отклике. Число ребер 536 и щелей 586 может изменяться от одного до нескольких. Возможен другой вариант выполнения, в котором ребра 536 не являются гибкими и/или упругими средствами, такими как были указаны выше, и предусмотрены в щелях 586 для приложения силы к ребрам 536 против их скручивания.
Понятно, что небольшие отклонения от идеи изобретения, выраженной приведенным выше описанием и прилагаемыми чертежами, тем не менее, включаются в объем защиты прилагаемой формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство защиты от беспилотных летательных аппаратов | 2023 |
|
RU2813389C1 |
| Устройство для установки на печатные платы радиоэлементов, преимущественно поверхностного монтажа | 1988 |
|
SU1777256A1 |
| КОНЕЧНОЕ УСТРОЙСТВО ПЕРЕМЕЩЕНИЯ ДЛЯ СИСТЕМ ПРИВОДА РОЛЬСТАВНЕЙ ИЛИ СВЕТОЗАЩИТНЫХ НАВЕСОВ | 2006 |
|
RU2373362C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИЗГОТОВЛЕНИЯ ГОФРИРОВАННОГО ЛИСТА МАТЕРИАЛА | 2018 |
|
RU2757894C2 |
| МОТОРИЗОВАННЫЙ ПРИВОД ВАЛИКА С ЗАЩИТОЙ ОТ ПЕРЕГРУЗКИ | 2008 |
|
RU2472051C2 |
| СИСТЕМА ХРАНЕНИЯ И ВЫДАЧИ ЛИСТОВЫХ СРЕДСТВ ДЛЯ АВТОМАТИЧЕСКОГО БАНКОВСКОГО АППАРАТА | 1999 |
|
RU2200695C2 |
| Автоматизированная система камер для обработки имплантатов | 2025 |
|
RU2839087C1 |
| МАШИНКА ДЛЯ СТРИЖКИ ВОЛОС И РЕЖУЩАЯ ГОЛОВКА ДЛЯ ТАКОЙ МАШИНКИ | 2018 |
|
RU2731632C1 |
| СПОСОБ И СИСТЕМА ЛОКАЛИЗАЦИИ НЕУПРАВЛЯЕМОГО ПОТОКА ТЕКУЧИХ СРЕД КОЛЛЕКТОРА В ОКРУЖАЮЩУЮ СРЕДУ | 2011 |
|
RU2579062C2 |
| ЭЛЕКТРОННЫЙ МОДУЛЬ И МОДУЛЬНАЯ СИСТЕМА ДЛЯ УСТРОЙСТВА ДОСТАВКИ ЛЕКАРСТВЕННОГО СРЕДСТВА | 2020 |
|
RU2827952C1 |







Изобретение относится к области строительства, а именно к конструкциям рольставней. Изобретение позволит повысить надежность конструкции рольставней. Способ обеспечения защитной системы для барьеров, перемещаемых вдоль рабочего пути и приводимых в действие двигателем, таких как рольставни, ворота, включает соединение барьера с зазором с неподвижной частью, так что барьер перемещается по участку перемещения независимо от действия двигателя, определение внутри участка перемещения набора безопасных положений, соответствующих безопасному положению барьера, запоминание, по меньшей мере, одного набора безопасных положений, при этом указанный набор безопасных положений связан взаимно однозначно с набором положений барьера вдоль рабочего пути, определение вдоль участка перемещения действительного положения барьера относительно неподвижной части при движении барьера вдоль рабочего пути, сравнение соответствующей величины, принадлежащей к набору безопасных положений, с действительным положением барьера вдоль участка перемещения, когда барьер достигает точки, которая принадлежит к набору положений вдоль рабочего пути, предотвращение или реверсирование действия двигателя и/или движения барьера, когда барьер, внутри участка перемещения (98), занимает положение, не входящее в набор безопасных положений. 2 н. и 27 з.п. ф-лы, 23 ил.
1. Способ обеспечения защитной системы для барьеров, перемещаемых вдоль рабочего пути и приводимых в действие двигателем, таких как рольставни, ворота, согласно которому
соединяют барьер с зазором с неподвижной частью (30), так что барьер перемещается по участку (98) перемещения независимо от действия двигателя;
определяют внутри участка (98) перемещения набор безопасных положений, соответствующих безопасному положению барьера;
запоминают, по меньшей мере, один набор безопасных положений, при этом указанный набор безопасных положений связан взаимно однозначно с набором положений барьера вдоль рабочего пути;
определяют вдоль участка (98) перемещения действительное положение барьера относительно неподвижной части (30) при движении барьера вдоль рабочего пути,
сравнивают соответствующую величину, принадлежащую к набору безопасных положений, с действительным положением барьера вдоль участка (98) перемещения, когда барьер достигает точки, которая принадлежит к набору положений вдоль рабочего пути,
предотвращают или реверсируют действие двигателя и/или движение барьера, когда барьер внутри участка (98) перемещения занимает положение, не входящее в набор безопасных положений.
2. Способ по п.1, при котором дополнительно рассматривают в качестве набора безопасных положений положения, занимаемые барьером на участке (98) перемещения во время испытательного движения перемещения барьера в безопасных рабочих условиях.
3. Способ по п.2, при котором сравнение выполняют с положениями, полученными во время испытательного движения перемещения.
4. Способ по любому из пп.1-3, при котором дополнительно задают для сравнения, по меньшей мере, одну величину допуска инициирования, лишь за пределами которой предотвращают действие двигателя и/или перемещение барьера.
5. Способ по п.1, при котором барьер является рольставнями, наматываемыми на валик (25), который присоединен с поворотным зазором к неподвижной опорной части (30) для рольставней.
6. Способ по п.5, при котором набор безопасных положений получают с помощью выборки сигнала, создаваемого датчиком углового положения валика относительно опорной части.
7. Способ по любому из пп.5 или 6, при котором двигатель образует часть кинематической цепи (24, 23, 22, 70), которая соединяет рольставни с неподвижной опорной частью.
8. Способ по п.1, при котором дополнительно передают в дистанционный приемный компонент информацию, относящуюся к набору безопасных положений и/или действительному положению барьера на участке перемещения во время движения барьера.
9. Способ по п.8, при котором передачу выполняют с использованием беспроводных передающих средств.
10. Способ по п.1, при котором дополнительно устанавливают упругие средства (97; 197) на участке (98; 198) перемещения.
11. Защитное устройство (50) для барьеров, перемещаемых вдоль рабочего пути и приводимых в действие с помощью двигателя, таких как рольставни, ворота для осуществления способа по любому из пп.1-10, содержащее
часть (30), неподвижную относительно перемещения барьера;
кинематическую цепь (24, 23, 22, 73), с помощью которой неподвижная часть присоединяется с зазором к барьеру, при этом барьер выполнен с возможностью перемещения по участку (98) перемещения независимо от действия двигателя;
обнаруживающие средства (42, 95) для определения относительного положения неподвижной части (30) и барьера вдоль участка (98) перемещения;
процессорный блок (99), который получает данные положения из обнаруживающих средств (42, 95) и предотвращает или реверсирует действие двигателя и/или движение барьера, когда на участке (98) перемещения барьер занимает положение, не входящее в набор безопасных положений, которые хранятся в средствах памяти и связаны взаимно однозначно с набором положений барьера на рабочем пути, при этом процессорный блок (99) также выполнен с возможностью сравнения действительного положения барьера на участке (98) перемещения с величиной, связанной с набором безопасных положений, когда барьер достигает соответствующую точку, относящуюся к набору положений на рабочем пути.
12. Устройство по п.11, в котором процессорный блок (99) содержит записывающие средства, соединенные с обнаруживающими средствами (42, 95) для определения перемещения относительного положения неподвижной части (30) и барьера на участке (98) перемещения и записи положений, занимаемых барьером на участке (98) перемещения во время испытательного движения перемещения барьера.
13. Устройство по п.12, в котором процессорный блок (99) выполнен с возможностью рассматривания положений, записанных с помощью записывающих средств, в качестве набора безопасных положений.
14. Устройство по п.12 или 13, в котором записывающие средства (99) снабжены памятью, в которой сохраняется, по меньшей мере, один набор безопасных положений.
15. Устройство (20) по п.11, в котором процессорный блок (99) выполнен с возможностью предотвращения действия двигателя и/или движения барьера, лишь когда разница, полученная от сравнения набора безопасных положений и действительного положения барьера на участке перемещения, больше величины допуска инициирования.
16. Устройство (20) по п.11, в котором барьер является рольставнями, наматываемыми на валик (25), который соединен с помощью поворотного зазора (98) с неподвижной опорной частью (30) для рольставней.
17. Устройство (20) по п.16, в котором двигатель образует часть кинематической цепи (24, 23, 22, 70), которая соединяет рольставни с неподвижной опорной частью.
18. Устройство (20) по любому из пп.16 или 17, в котором неподвижная часть содержит полость (33), внутри которой коаксиально вращается с угловым зазором (98) вращающаяся часть (70), кинематически соединенная с валиком (25).
19. Устройство (20) по п.18, в котором угловой зазор (98) образован одним или более радиальных выступов (36) в неподвижной части (30), которые выполнены с возможностью перемещения по угловому участку (98) внутри соответствующих зон (74) углубленных поверхностей вращающейся части (70), или наоборот.
20. Устройство (20) по п.19, в котором неподвижная часть (30) содержит круговую кромку (34), которая имеет расположенные внутри нее зубцы (36), расположенные с относительным радиальным расположением относительно центра кромки (34), с которой соединена с возможностью вращения вращающаяся часть (70), при этом вращающаяся часть также имеет круговую кромку (72) с диаметром, меньшим диаметра неподвижной части, так, чтобы обеспечить точную установку внутрь нее и вращение с контактом, при этом кромка (72) вращающейся части (70) напротив зубцов (36) углублена в направлении ее центра с образованием вогнутостей (74), имеющих ширину, превышающую ширину зубцов (36), так что, когда вращающаяся часть (70) вращается относительно неподвижной части, зубцы (36) перемещаются внутри вогнутостей (74).
21. Устройство (520) по п.20, в котором угловой зазор (598) образован одним или несколькими радиальными ребрами (536), предусмотренными в неподвижной части (530) или вращающейся части (570), устанавливаемыми путем введения в соответствующие щели (586), предусмотренные во вращающейся части (570) или в неподвижной части (530), соответственно.
22. Устройство (520) по п.21, в котором одно или несколько радиальных ребер (536) являются гибкими, так что, когда под действием скручивания вращающаяся часть (570) поворачивается достаточно относительно неподвижной части, ребра (536) способны сгибаться, за счет чего обеспечивается противодействующая сила, достаточная для противостояния чрезмерному скручиванию и упругоперемещающая вращающуюся часть (570) обратно в первоначальное положение, когда скручивание равно нулю.
23. Устройство (520) по п.21, в котором одно или несколько радиальных ребер (536) установлены с зазором внутри соответствующих щелей (586).
24. Устройство (520) по п.23, в котором в щелях (586) предусмотрены упругие средства для приложения к ребрам (536) силы против их скручивания.
25. Устройство (20) по п.11, в котором обнаруживающие средства содержат один или несколько магнитов (42), расположенных на неподвижной части, и один или несколько датчиков (45) магнитного поля, расположенных на вращающейся части, или наоборот.
26. Устройство (20) по п.11, которое дополнительно содержит передающие средства для передачи информации, относящейся к набору безопасных положений и/или действительному положению барьера внутри участка, измеренных во время движения барьера, в дистанционный приемный компонент.
27. Устройство (20) по п.26, в котором передающие средства являются беспроводными передающими средствами.
28. Устройство (20) по п.11, в котором упругие средства (97) расположены на участке (98) перемещения для упругого толкания барьера в нулевое опорное положение на участке перемещения.
29. Устройство (20) по п.11, в котором процессорный блок (99) содержит устройство для выборки.
| DE 4440449 A1, 29.06.1995 | |||
| Способ метропластики во время оперативного родоразрешения у женщин с двумя и более операциями кесарева сечения | 2022 |
|
RU2790787C1 |
| US 5743320 A, 28.04.1998 | |||
| US 2005039994 A1, 24.02.2005 | |||
| УПРАВЛЯЮЩИЙ МЕХАНИЗМ С МУФТОЙ ДЛЯ РОЛИКОВЫХ ШТОР | 1996 |
|
RU2118439C1 |

