Область техники, к которой относится модель
Изобретение относится к области медицинской техники, а именно - к устройству применяемому в области травматологии и ортопедии для модификации поверхности имплантатов, выполненных на основе термопластов.
В настоящее время наблюдается активное развитие в области травматологии и ортопедии, одной из задач которой является внедрение в клиническую практику автоматизированных систем и оборудования для создания биоактивных свойств поверхности имплантатов на основе термопластов. Применение устройства позволит заменить имплантаты из титановых сплавов, которые высоко подвержены коррозии и могут приводить к скоплению избыточных ионов в организме, на имплантаты на основе термопластов. Более того преимуществом внедрения автоматизированного устройства будет снижение рисков контаминации изделия, обеспечение воспроизводимости результата, а также снижение себестоимости обработки за счет экономичного расхода материалов, чего трудно достигнуть в лабораторных условиях ручным трудом. Поверхность конечного изделия после обработки способствует увеличению эффекта остеогенеза, что снижает риски повторных операций. Поскольку форма имплантатов определяется индивидуально в ходе предоперационной подготовки и зависит от каждого пациента, а также может иметь отличительные особенности по форме в зависимости от области применения, то необходима разработка универсального устройства, позволяющего обрабатывать изделия сложной формы, в том числе с возможностью выбора нужной площади и части поверхности.
Уровень техники
Из уровня техники известно устройство, которое представляет из себя роботическую систему для транспортировки изделий вежду вакуумными камерами, в которых происходит обработка полупроводниковых электронных устройств JPH 0465853 А (опубл. 02.03.1992). Трехосевой робот установлен в вакуумном контейнере и обеспечивает перемещение обрабатываемого изделия в радиально расположенные вакуумные контейнеры с использованием электромагнитного соединения элементов механизма и крепления изделия.
Однако, в известном устройстве отсутствует возможность перемещать обрабатываемое изделие внутри камеры для обработки, что не позволяет обеспечить точный контроль над площадью поверхности. Камеры внутри устройства необходимо обслуживать вручную, что может привести к повреждениям, а также требует специального оборудования. Более того, внутри каждой камеры нет системы для обеспечения стерильности каждой зоны и, следовательно, требует постобработки изделия, что требует дополнительного оборудования, а также времени. Каждая камера изолирована друг от друга, однако отсутствует термическая изоляция, что может привести к нарушению процесса обработки.
Известна производственная система для обработки деталей (мишень G) (US 2011027058 А1, опубл. 03.02.2011), которая состоит из загрузочной камеры, камер обработки и общей камеры с транспортным механизмом, который обеспечивает перемещение мишени между камерами обработки и общей камерой. Камеры являются вакуумными и имеют герметичные корпуса с отверстиями для загрузки/выгрузки мишени. Камеры отделены друг от друга задвижками. Транспортный механизм может быть расположен как в потолочной части камеры, так и в нижней части, включает в себя блоки захвата и скольжения, а также приводной блок для вертикального перемещения и вращения мишени.
Недостатками указанного устройства является отсутствие манипуляторов, которые не могут обеспечить контроль площади модификации поверхности изделия внутри камер обработки. При перемещении между камерами обработки отсутствует барьер, препятствующий проникновению среды из одной камеры в другую, что может привести к нарушению технического процесса и изменить свойства обработанной поверхности. Отсутствие стерильных зон накладывает дополнительные этапы постобработки, что требует дополнительного оборудования.
Наиболее близким аналогом рассматриваемой разработки может быть выбрано устройство, которое представляет из себя модульную платформу робота для обработки полупроводниковых или электрических твердотельных материалов (US 2024178027 А1, опубл. 30.05.2024). Модульная платформа содержит транспортную камеру и линейно расположенные камеры обработки подложек, отсеки обеспечивают загрузку/выгрузку подложек. Транспортный аппарат перемещает подложки между камерами обработки с использованием робота с рукой Scara по рельсовым направляющим, которые могут быть расположены как на полу, так и на боковых стенках камеры. Кроме того, камеры обработки могут иметь радиальное расположение по отношению к транспортной камере
Однако, недостатками данного устройства, является невозможность перемещения обрабатываемого изделия внутри камеры обработки, что не может обеспечить возможность для точного контроля глубины погружения изделия для обработки нужной площади поверхности. При перемещении из транспортировочной камеры в камеру обработки и наоборот есть вероятность оседания мелких частиц или перенос их из одной камеры в другую, что может повлиять на качество обработки. Более того внутри самих камер обработки нет системы обеспечивающей регулярный поток воздуха во избежания возникновения окислов, а также камеры термически не изолированы друг от друга. Отсутствие системы, которая обеспечивает стерильность изделия как после помещения в устройство, так и на выходе.
Технической проблемой, решение которой обеспечивается при использовании настоящего изобретения, является создание автоматизированного настольного (малогабаритного) устройства модификации поверхности имплантатов на основе термопластов, применяемых в области травматологии и ортопедии, что в свою очередь способствует улучшению процесса остеосинтеза и уменьшает риск отторжения медицинского изделия.
Раскрытие сущности изобретения
Технический результат, обеспечиваемый изобретением при решении технической проблемы, заключается в автоматизации всех этапов обработки имплантата, что позволяет получать воспроизводимые результаты, а также исключает риск контаминации имплантата. Более того, конструкция камеры позволяет производить одновременную обработку нескольких изделий сразу, что сокращает общее время обработки.
Технический результат достигается за счет следующей совокупности существенных признаков:
автоматизированная система камер для обработки имплантатов содержит центральную камеру для загрузки и выгрузки имплантата и расположенные радиально по отношению к ней термически изолированные друг от друга камеры обработки, отделенные от центральной камеры гофрированными рольставнями,
центральная камера выполнена с возможностью термоизоляции камер обработки друг от друга при перемещении имплантата из одной камеры в другую без одновременного открытия рольставней,
в дно корпуса центральной камеры встроен круговой поворотный механизм с возможностью поворота на 360 градусов в виде вращающейся вокруг своей центральной оси платформы с рельсовыми направляющими, на которых установлена тележка с закрепленным на ней металлическим каркасом в виде сетчатой корзины из нержавеющей кислотостойкой стали для размещения имплантата,
тележка выполнена с возможностью передвижения по рельсовым направляющим из центральной камеры в камеры обработки посредством механизма, выполненного с возможностью смены направления движения тележки между камерами обработки,
в верхней части центральной камеры закреплен узел перемещения по оси X, Y, Z, содержащий опорную раму и рабочую платформу,
к рабочей платформе узла прикреплены фиксирующие элементы, выполненные в виде электромагнитов или системы захвата, для разъемного соединения с рамкой, расположенной в верхней части металлического каркаса для размещения имплантата,
узел перемещения в верхней части камеры по осям X и Y состоит из круговых рельсовых направляющих, роликовых направляющих, элемента крепления роликов, приводного ремня и шагового двигателя, которые соединены между собой, опорная рама узла соединена с элементом крепления роликов,
к опорной раме узла прикреплен шаговый двигатель, выполненный с возможностью приведения в движение оси передачи вращения, элемент жесткости для передачи вращения закреплен с осью передачи вращения и верхней подвижной осью, которая выполнена с возможностью движения по направляющим при помощи колесного блока, закрепленного на горизонтальных осях, каждая из которых соединена с ножничными рычагами, выполненными с возможностью перемещения по оси Z.
В частном случае выполнения автоматизированной системы камер гофрированные рольставни выполнены из материала с низким коэффициентом теплопроводности (известно, что значение низкой теплопроводности материала находится в диапазоне от 0,1 до 3,000 Вт/(м*К) [1], [2]).
В частном случае выполнения автоматизированной системы камер центральная камера содержит по меньше мере одну ультрафиолетовую лампу.
В частном случае выполнения автоматизированной системы камер центральная камера выполнена с возможностью обеспечения ламинарного потока по периметру внутреннего пространства.
Автономное устройство модификации поверхности имплантатов на основе термопластов состоит из корпуса, который поделен на центральную камеру и 3 (или более) радиальные камеры, термически изолированные друг от друга и отделенные от центральной камеры рольставнями с низким коэффициентом теплопроводности [1], [2].
Центральная камера А выполняет функцию промежуточного коридора для загрузки/выгрузки изделия, а также перемещения из одной камеры обработки в другую, без одновременного открытия рольставней. По периметру камеры расположен ламинарный поток, который обеспечивает постоянную подачу очищенного воздуха и вытяснение загрязненного, а также выполняет функцию воздушного барьера при перемещении изделия из одной камеры в другую. Для обеспечения стерильности в центральной камере присутствует УФ лампа, расположенная по периметру на стенках камеры А. Наличие дверей с низким коэффициентом теплопроводности ([1], [2]). между радиальными камерами и центральной, позволяет достигнуть градиента температур. Перемещение в радиальные камеры в плоскости X, Y осуществляется за счет поворотного механизма, расположенного в центральной камере А, а также толкательного устройства выполненного в виде ножничного захвата. Манипулятор осуществляющий перемещение корзины расположен в верхней части камеры и осуществляет перемещение внутри камеры обработки в плоскости Z, а тележка осуществляет круговое перемещение в плоскости XY. Так же опционально манипулятор может быть расположен внутри каждой камеры. Система перемещения в плоскости Z, позволяет выполнять как механический захват, так и зафиксировать устройство с помощью электромагнитов. Обработка изделия проводится в полном автоматизированном режиме без прерывания этапов, что позволяет сократить риски контаминации изделия.
Разработанная нами система является мобильной, эргономичной, удобной в обслуживании, а также позволяет проводить обработку поверхности большего количества имплантатов в единицу времени, сокращает время, уменьшает расход материала, а, следовательно, и стоимость изделия, снижает вероятность ошибки лаборанта, которые могут привести к неправильным свойствам поверхности, потере или порче образцов. Такие ошибки могут привести к повторной операции, нестабильному процессу остеосинтеза или отторжению имплантата.
Кроме того, система имеет модульную конструкцию, может быть легко интегрироваться в автоматизированную лабораторную среду, предоперационные стерильные зоны и входить в комплекс (систему) взаимосвязанных модулей по автоматизации большей части процессов обработки поверхности.
Краткое описание чертежей
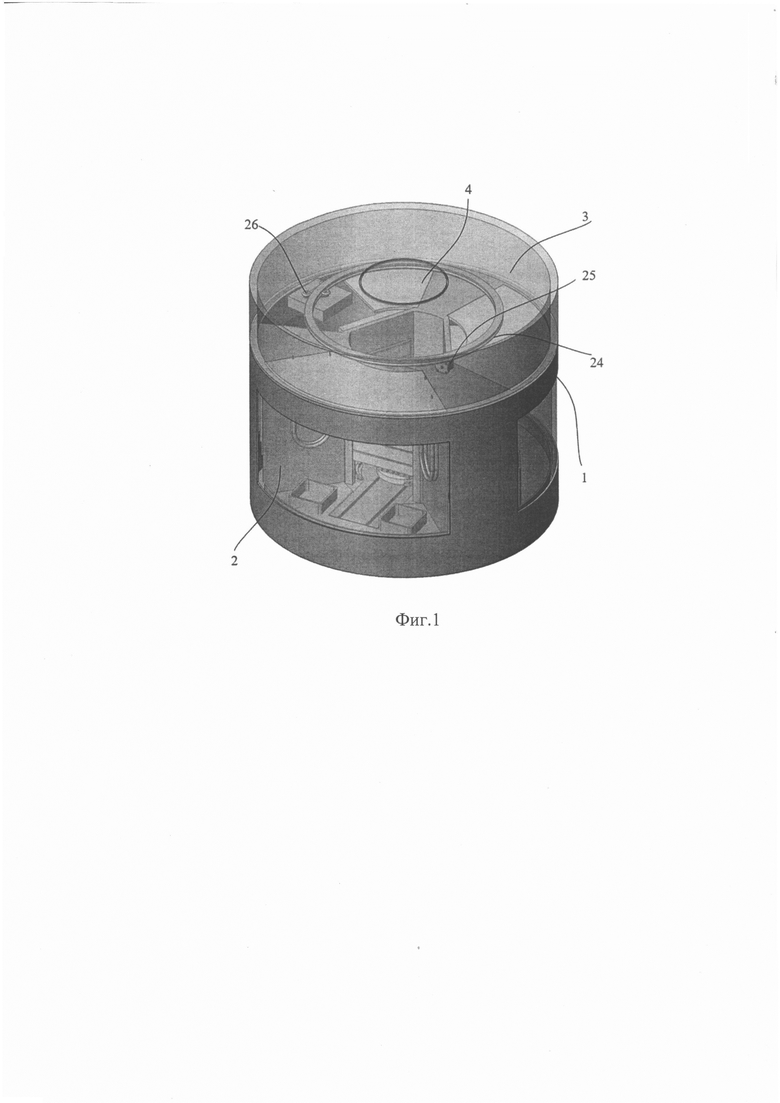
На фиг. 1 представлен общий вид устройства
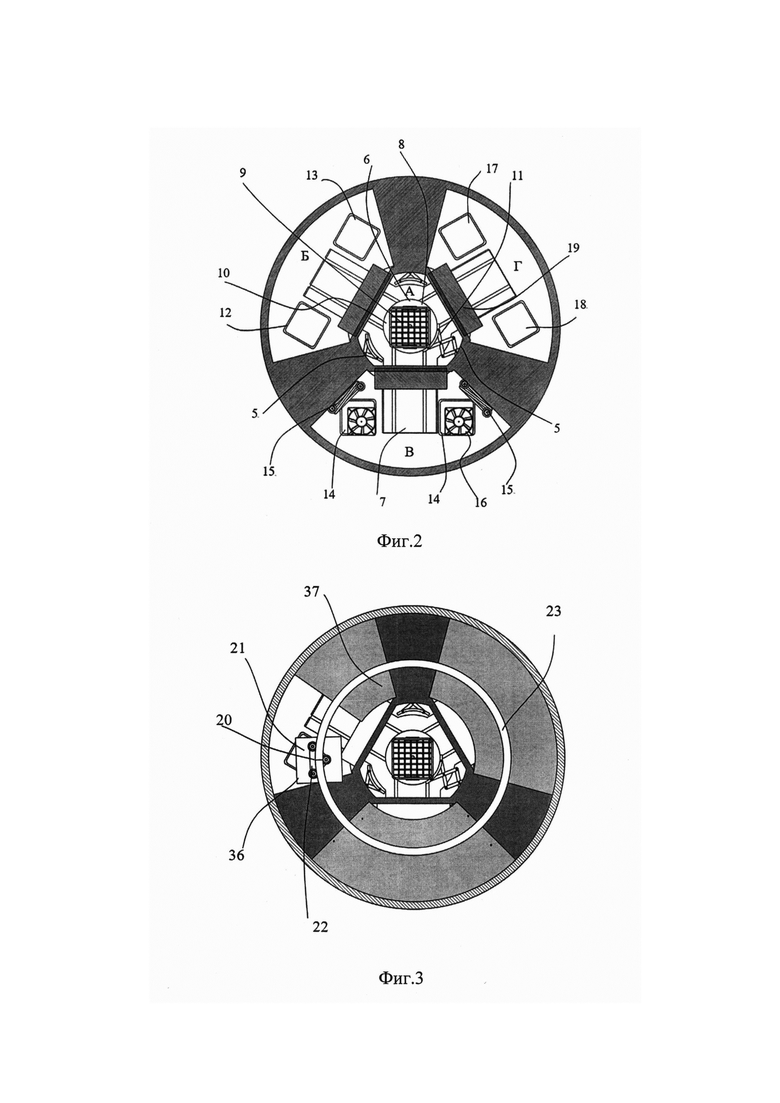
На фиг. 2 представлен вид сверху на основание устройства
На фиг. 3 представлен вид сверху на верхнюю часть устройства
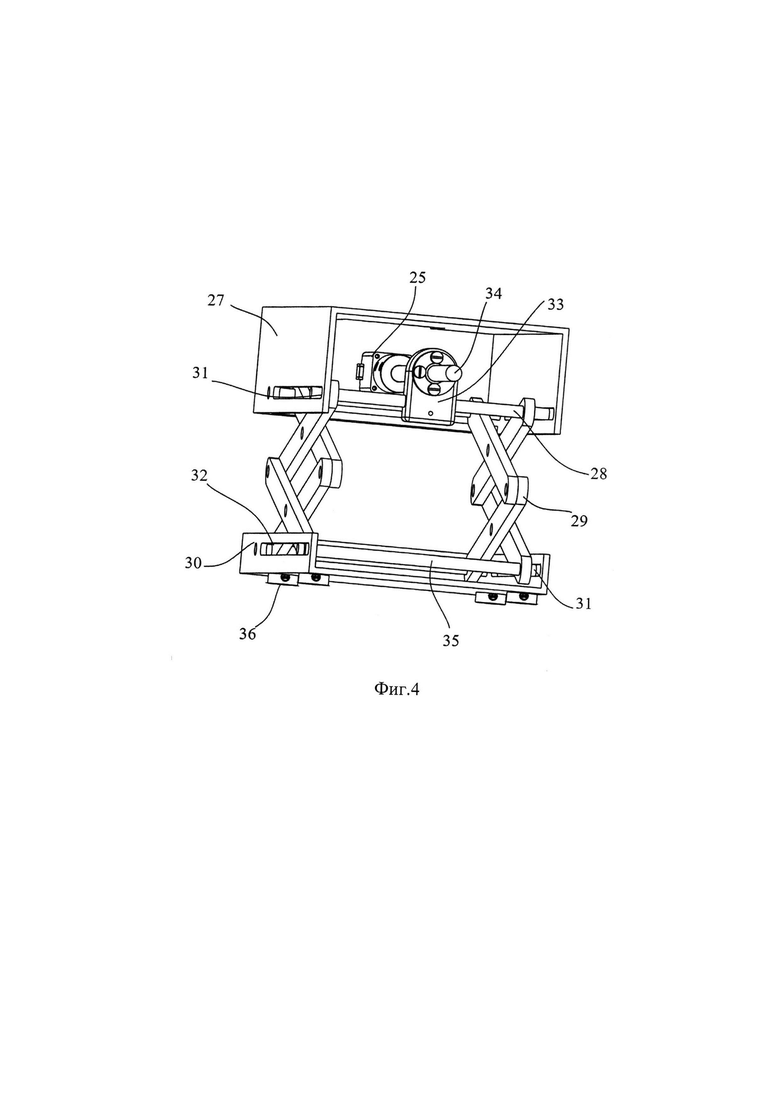
На фиг. 4 представлен общий вид системы ножничного захвата по оси Z
Элементы устройства, обозначенные позициями на фигурах 1-4:
корпус 1;
окошко для наблюдения 2;
защитная крышка 3;
крышка для выгрузки/загрузки изделия 4;
лампы ультрафиолета 5;
отверстия для воздушного ламинарного потока 6;
рельсовая система 7;
тележка для перемещения корзины 8;
металлическая корзина 9;
поворотный механизм 10;
ножничный захват 11;
емкость для хранения жидкостей 12;
емкость для хранения раствора кислот 13;
платформа для фиксации корзины 14;
трубчатый электронагреватель 15;
система вентиляции 16;
емкость для хранения растворов кислот 17;
емкость для хранения коллагена 18;
рольставни 19;
каретка 20;
манипулятор 21;
элемент крепления роликов 22;
круговые рельсовые направляющие 23;
приводной ремень 24;
шаговый двигатель 25;
роликовые направляющие 26;
опорная рама 27;
ось подвижная верхняя 28;
ножничные рычаги 29;
платформа рабочая 30;
колесный блок 31;
направляющие 32;
элемент жесткости для передачи движения 33;
ось передачи вращения 34;
ось подвижная нижняя 35;
магнитный захват 36;
выдвижные крышки 37.
Осуществление изобретения
Устройство состоит из корпуса 1, в котором расположены окна для наблюдения за обработкой 2. В верхней части корпуса располагается защитная крышка 3, к которой присоединена крышка для загрузки/выгрузки изделия 4.
Внутри устройство состоит из центральной камеры А и трех (опционально более трех) радиально расположенных камер Б, В и Г.
Внутри центральной камеры расположена система для стерилизации, выполненная в виде ультрафиолетовых ламп 5, а также ламинарного потока 6, расположенного по периметру камеры. В основании камеры расположена рельсовая система 7, тележка для перемещения корзины 8 для перемещения металлической корзины 9. Внутри тележки для перемещения корзины 8 расположен поворотный механизм 10.
Перемещение тележки 8 в плоскости XY в основании системы камер осуществляется с помощью ножничного захвата 11, который толкает/тянет корзину 8 вдоль рельсовой системы 7 пока корзина не переместится из центральной камеры А в радиально расположенную ей камеры Б, В или Г и наоборот, в зависимости от направления. А также с помощью поворотного механизма 10, который осуществляет смену направления и задает правильное положение тележки для перемещения корзины 8, чтобы в дальнейшем правильно позиционировать корзину 9. Для осуществления перемещения в каждую из камер в корпусе 1 расположено несколько (1 и более) ножничных захватов 11.
В камере Б располагаются емкости для кислот и других жидкостей 12 и 13 соответственно. Опционально количество емкостей может быть увеличено. А также рельсовая система 7, расположенная в основании камеры.
В основании камеры В расположена рельсовая система 7, установлены платформы для фиксации корзины 14. В корпусе камеры располагаются воздушные трубчатые электронагреватели 15, а также система вентиляции 16.
В основании камеры Г располагается рельсовая система 7, емкости с терморегуляцией 17 и 18. Изоляция между камерами осуществляется за счет корпуса 1, а также за счет рольставней 19, которые выполняют роль дверей между камерами.
Под защитной крышкой 3 располагается каретка 20, закрепленная с манипулятором 21 на элемент крепления роликов 22. Данная система манипулятора и каретки осуществляет перемещение металлической корзины 9 внутри камер Б, В и Г вдоль оси XYZ. Каретка 20 осуществляет перемещение в плоскости XY вдоль круговых рельсовых направляющих 23, закрепленных на корпусе 1 при помощи приводного ремня 24, соединенного с шаговым двигателем 25, а также роликовых направляющих 26, осуществляющих точное перемещение. В плоскости Z осуществляется перемещение с помощью системы ножничного захвата, состоящей из опорной рамы 27, на которую крепится ось подвижная верхняя 28, соединенная с ножничными рычагами 29, и из рабочей платформы 30. Ножничные рычаги 29 с одной стороны зафиксированы жестко, а с другой оснащены колесными блоками 31 для движения по направляющим 32. Подвижная ось верхняя 28 осуществляет перемещение за счет элемента жесткости для передачи движения 33, соединенного с осью передачи вращения 34. В свою очередь ось передачи вращения 34 соединена с шаговым двигателем 25, жестко закрепленным с опорной рамой 27. Подвижная ось нижняя 35 осуществляет перемещение вдоль направляющих 32 за счет жесткого крепления с ножничными рычагами 29, через которые осуществляется передача движения. На рабочей платформе 30 расположена система магнитного захвата 36 (опционально может быть механический захват или гибридная система), которая осуществляет захват металлической корзины 9. Манипулятор 21 отделяется от камер выдвижными крышками 37, выполняющими защитную функцию.
Устройство работает следующим образом.
Обрабатываемое изделие погружается в устройство для обработки через крышку 4 и помещается внутрь металлической корзины 9. После закрытия крышки 4 включается ультрафиолетовая лампа 5 для предварительной стерилизации изделия. Корзина зафиксирована на тележке для перемещения корзины 8, которая приводится в движение посредством поворотной системы 10, а за счет системы ножничного захвата 11 осуществляется перемещение из камеры А в камеру Б по рельсовой системе 7. Предварительно включается система ламинарного потока 6, выполняющая функцию воздушного барьера, и затем открываются рольставни 19 между камерой А и Б, после чего тележка 8 с корзиной 9 перемещаются в камеру Б. Затем система ножничного захвата 11 занимает исходное положение и рольставни 19 закрываются. В этот момент происходит открытие выдвижной крышки 38 над камерой Б и каретка 20, с закрепленным на ней манипулятором 21 на элемент крепления роликов 22, позиционируется над камерой Б. Перемещение в плоскости XY происходит следующим образом: шаговый двигатель 25 приводит в движение приводной ремень 24, который жестко закреплен с кареткой 20 и за счет этого каретка начинается двигаться по роликовым направляющим 26 вдоль круговых рельсовых направляющих 23. После чего манипулятор 21 осуществляет перемещение в плоскости Z.
Закрепленный на опорной раме 27 шаговый двигатель 25 передает вращение оси передачи вращения 34, которая передает вращение подвижной верхней оси 28 за счет элемента жесткости передачи движения 33. Верхняя и нижняя подвижные оси 28,36 осуществляют перемещение вдоль направляющих 32 при помощи колесного блока 31, жестко закрепленного с осями 28 и 36. Передача движения нижней подвижной оси 36 происходит за счет жестко закрепленных ножничных рычагов 29, которые крепятся к верхней и нижней подвижным осям 28,36. После чего осуществляется захват корзины 9 за счет магнитной системы 37, закрепленной на рабочей платформе 30. Манипулятор совершает обратное движение в плоскости Z и поднимает металлическую корзину 9, перемещая вдоль круговой рельсовой направляющей 23 внутри камеры Б и осуществляя погружение в емкости 12 и 13 последовательно, выполняя при этом перемещение при помощи манипулятора 21 в плоскости Z. Затем после 1 этапа обработки манипулятор 21 и каретка 20 корзину 9 на тележку для перемещения корзины 8. В этот момент манипулятор 21 занимает исходное положение, и крышка 38 над камерой Б закрывается. Включается система ламинарного потока 6 и открываются рольставни 19 между камерой А и Б, система ножничного захвата 11 перемещает тележку 8 в камеру А и рольставни 19 закрываются. За счет поворотной системы 10 тележка с корзиной 8 позиционируются для перемещения в камеру В. Перемещение в камеры В и Г осуществляется аналогично перемещению в камеру Б.
После того как тележка 8 оказалась в камере В, система манипулятора 21 и каретки 20 осуществляют перемещение металлической корзины 9 с изделием на специальную платформу для фиксации корзины 14. После чего манипулятор 21 осуществляет перемещение по оси Z вверх и крышка 38 изолирует камеру В и манипулятор. Тележка помещается посредством системы ножничного захвата 11 в центральную камеру А. После в камере Б включается тепловой воздушный электронагреватель 15 и нагревается до температуры 160-200С. Необходимо дождаться пока камера остынет до температуры 25-30С и затем можно осуществлять перемещение корзины 9 на платформу для дальнейшей обработки. В камере В можно производить как сушку, так и стерилизацию изделия перед покрытием в камере Г.
После всех этапов обработки изделия оно помещается в центральную камеру А, повторно стерилизуется и готовое изделия выгружается через крышку 4.
Список литературы:
1. Проектирование тепловой защиты зданий СП 23-101-2004, Приложение Д - Расчетные теплотехнические показатели материалов и изделий.
2. Теплопроводность материалов: учебное пособие / А.Г. Коротких; Томский политехнический университет. - Томск: Изд-во Томского политехнического университета, 2011 - 97 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| Камера для извлечения и интеллектуальная система доступа к пробам | 2023 |
|
RU2841107C2 |
| МОДУЛЬ И СИСТЕМА ФОРМИРОВАНИЯ ЦИФРОВЫХ ИЗОБРАЖЕНИЙ БИОЛОГИЧЕСКИХ ОБРАЗЦОВ | 2023 |
|
RU2813210C1 |
| СИСТЕМА ДЛЯ ИНКУБАЦИИ И ФОРМИРОВАНИЯ ЦИФРОВЫХ ИЗОБРАЖЕНИЙ БИОЛОГИЧЕСКИХ ОБРАЗЦОВ | 2023 |
|
RU2811721C1 |
| КАМЕРА ДЛЯ ИНКУБАЦИИ БИОЛОГИЧЕСКИХ ОБРАЗЦОВ | 2023 |
|
RU2813445C1 |
| АВТОМАТИЗИРОВАННЫЙ КОМПЛЕКС СБОРКИ РЕЛЬСОШПАЛЬНОЙ РЕШЕТКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2021 |
|
RU2761484C1 |
| Устройство для перегрузки изделий | 1989 |
|
SU1691231A1 |
| МОДУЛЬ ПЕРЕМЕЩЕНИЯ КОНТЕЙНЕРОВ В КАМЕРЕ ДЛЯ ИНКУБАЦИИ БИОЛОГИЧЕСКИХ ОБРАЗЦОВ | 2023 |
|
RU2812238C1 |
| Агрегат прерывно-поточного производства строительных изделий | 1980 |
|
SU998118A1 |
| КОМПЛЕКС ТРАНСПОРТИРОВКИ И АДРЕСНОЙ ДОСТАВКИ БЕТОНА | 2014 |
|
RU2587767C1 |
| Способ автоматизированного монтажа внешнего ограждения гравитационного накопителя энергии и система для его реализации | 2021 |
|
RU2759162C1 |
Изобретение относится к области медицинской техники, а именно, к устройству, применяемому в области травматологии и ортопедии для модификации поверхности имплантатов, выполненных на основе термопластов. Автоматизированная система камер для обработки имплантатов содержит центральную камеру для загрузки и выгрузки имплантата и расположенные радиально по отношению к ней термически изолированные друг от друга камеры обработки, отделенные от центральной камеры гофрированными рольставнями. Центральная камера выполнена с возможностью термоизоляции камер обработки друг от друга при перемещении имплантата из одной камеры в другую без одновременного открытия рольставней. В дно корпуса центральной камеры встроен круговой поворотный механизм с возможностью поворота на 360° в виде вращающейся вокруг своей центральной оси платформы с рельсовыми направляющими, на которых установлена тележка с закрепленным на ней металлическим каркасом в виде сетчатой корзины из нержавеющей кислотостойкой стали для размещения имплантата. Тележка выполнена с возможностью передвижения по рельсовым направляющим из центральной камеры в камеры обработки посредством механизма, выполненного с возможностью смены направления движения тележки между камерами обработки. В верхней части центральной камеры закреплен узел перемещения по осям X, Y, Z, содержащий опорную раму и рабочую платформу. К рабочей платформе узла прикреплены фиксирующие элементы, выполненные в виде электромагнитов или системы захвата, для разъемного соединения с рамкой, расположенной в верхней части металлического каркаса для размещения имплантата. Узел перемещения в верхней части камеры по осям X и Y состоит из круговых рельсовых направляющих, роликовых направляющих, элемента крепления роликов, приводного ремня и шагового двигателя, которые соединены между собой. Опорная рама узла соединена с элементом крепления роликов. К опорной раме узла прикреплен шаговый двигатель, выполненный с возможностью приведения в движение оси передачи вращения. Элемент жесткости для передачи вращения закреплен с осью передачи вращения и верхней подвижной осью, которая выполнена с возможностью движения по направляющим при помощи колесного блока, закрепленного на горизонтальных осях, каждая из которых соединена с ножничными рычагами, выполненными с возможностью перемещения по оси Z. Система позволяет автоматизировать все этапы обработки имплантата, что позволяет получать воспроизводимые результаты, а также исключает риск контаминации имплантата. 3 з.п. ф-лы, 4 ил.
1. Автоматизированная система камер для обработки имплантатов, содержащая центральную камеру для загрузки и выгрузки имплантата и расположенные радиально по отношению к ней термически изолированные друг от друга камеры обработки, отделенные от центральной камеры гофрированными рольставнями,
отличающаяся тем, что
центральная камера выполнена с возможностью термоизоляции камер обработки друг от друга при перемещении имплантата из одной камеры в другую без одновременного открытия рольставней,
в дно корпуса центральной камеры встроен круговой поворотный механизм с возможностью поворота на 360 градусов в виде вращающейся вокруг своей центральной оси платформы с рельсовыми направляющими, на которых установлена тележка с закрепленным на ней металлическим каркасом в виде сетчатой корзины из нержавеющей кислотостойкой стали для размещения имплантата,
тележка выполнена с возможностью передвижения по рельсовым направляющим из центральной камеры в камеры обработки посредством механизма, выполненного с возможностью смены направления движения тележки между камерами обработки,
в верхней части центральной камеры закреплен узел перемещения по оси X, Y, Z, содержащий опорную раму и рабочую платформу,
к рабочей платформе узла прикреплены фиксирующие элементы, выполненные в виде электромагнитов или системы захвата, для разъемного соединения с рамкой, расположенной в верхней части металлического каркаса для размещения имплантата,
узел перемещения в верхней части камеры по осям X и Y состоит из круговых рельсовых направляющих, роликовых направляющих, элемента крепления роликов, приводного ремня и шагового двигателя, которые соединены между собой, опорная рама узла соединена с элементом крепления роликов,
к опорной раме узла прикреплен шаговый двигатель, выполненный с возможностью приведения в движение оси передачи вращения, элемент жесткости для передачи вращения закреплен с осью передачи вращения и верхней подвижной осью, которая выполнена с возможностью движения по направляющим при помощи колесного блока, закрепленного на горизонтальных осях, каждая из которых соединена с ножничными рычагами, выполненными с возможностью перемещения по оси Z.
2. Автоматизированная система камер по п. 1, отличающаяся тем, что гофрированные рольставни выполнены из материала с низким коэффициентом теплопроводности.
3. Автоматизированная система камер по п. 1, отличающаяся тем, что центральная камера содержит по меньше мере одну ультрафиолетовую лампу.
4. Автоматизированная система камер по п. 1, отличающаяся тем, что центральная камера выполнена с возможностью обеспечения ламинарного потока по периметру внутреннего пространства.
| CN 101692987 B, 27.04.2011 | |||
| CN 102755203 B, 21.01.2015 | |||
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ ПОВЕРХНОСТИ ИМПЛАНТАТОВ | 2016 |
|
RU2624368C1 |
| US 20240190651 A1, 13.06.2024 | |||
| Роботизированный комплекс для нанесения полимерных и лекарственных покрытий на импланты | 2018 |
|
RU2699356C1 |
| WO 2024178027 A1, 29.08.2024. | |||

