Изобретение относится к области пассивной радиолокации и может быть использовано для определения параметров движения источника радиоизлучения (ИРИ).
Известен способ определения координат движущегося ИРИ с неизвестными параметрами и устройство для его осуществления, основанный на последовательном ряде измерений угловых координат движущегося ИРИ, измерение частоты излучения, принятого двумя приемниками, антенны которых движутся относительно с известными, но различными радиальными скоростями, расчете по результату измерений радиальной скорости ИРИ в каждый момент измерений, а начиная с третьего измерения, дальности до ИРИ [Россия, патент №2234712, 2004 г, 7 МПК G01S 11/00].
Данный способ позволяет определить только радиальную составляющую скорости движения ИРИ, а не истинную скорость и направление движения.
Известен разностно-дальномерный способ определения местоположения ИРИ, где в каждой паре позиций измеряют разность доплеровских сдвигов частоты, которая пропорциональна скорости изменения разностей дальностей, путем измерения смещения центральной частоты взаимно-корреляционной функции принятых сигналов [Черняк B.C. Многопозиционная радиолокация. - М.: Радио и связь, 1993 г., стр.319].
При определении местоположения источников узкополосных сигналов, используемых, например, в радиотелефонии, возникают большие ошибки 100…200% дальности, следовательно, и скорости [О.В. Король и др. Повышение точности определения местоположения узкополосных ИРИ многопозиционной разностно-дальномерной системой. «Радиотехника», 1998 г., №5, стр.79].
Способ также не позволяет определять направление движения ИРИ.
Наиболее близким по технической сущности к предполагаемому способу является триангуляционный способ определения координат ИРИ, основанный на измерении угловых направлений (пеленгов) на ИРИ из двух и более приеме - пеленгаторных пунктов, разнесенных между собой на расстояние, называемое базой и расчете координат ИРИ по известным формулам [Теоретические основы радиолокации. Под редакцией Я.Д.Ширмана. - М.: Сов. радио, 1970 г., стр.494-496].
Способ позволяет планшетным методом по нескольким измерениям (засечкам) дискретно определять только изменения местоположения ИРИ.
Техническим результатом изобретения является увеличение количества (полнота) определяемых параметров движения ИРИ: местоположение, направление и модуль скорости движения ИРИ.
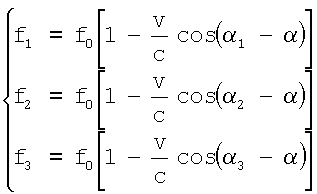
Технический результат достигается тем, что в триангуляционном способе определения местоположения ИРИ путем измерения угловых направлений (пеленгов) на ИРИ - α1, α2, α3 из трех приемно-пеленгаторных пунктов, разнесенных друг от друга на расстояние, называемое базой, дополнительно одновременно в соответствующих приемо-пеленгаторных пунктах измеряют частоты принимаемого сигнала ИРИ - f1, f2, f3, вычисляют промежуточные значения направления движения ИРИ

и скорости движения ИРИ - по формулам



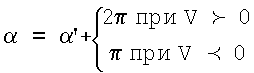
определяют однозначные значения направления движения ИРИ
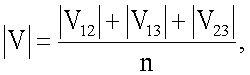
и модуля скорости движения ИРИ - 
где с - скорость распространения сигнала ИРИ;

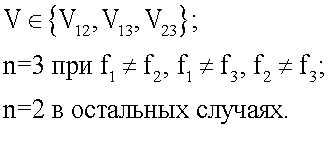
n=3 при f1≠f2, f1≠f3, f2≠f3;
n=2 в остальных случаях.
Результаты поиска известных технических решений в данной и смежных областях техники с целью выявления признаков, совпадающих с отличительными признаками заявленного способа, показали, что в общедоступных источниках информации они отсутствуют.
Из уровня техники также не подтверждена известность влияния отличительных признаков заявленного изобретения на указанный заявителем технический результат. Следовательно, заявленное изобретение соответствует условию «изобретательский уровень». Предлагаемый способ промышленно применим, так как совокупность характеризующих его признаков обеспечивает возможность его существования, работоспособности и воспроизводимости, а для реализации способа могут быть использованы известные материалы и оборудование.
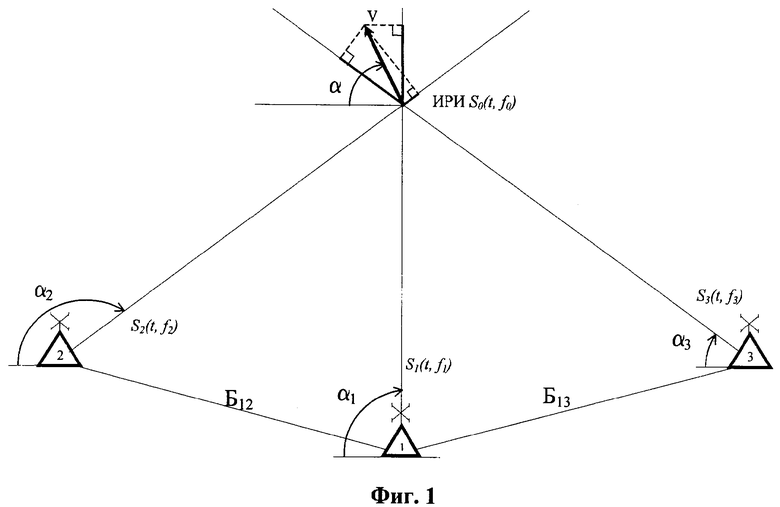
На фиг.1 изображена схема реализации предлагаемого способа.
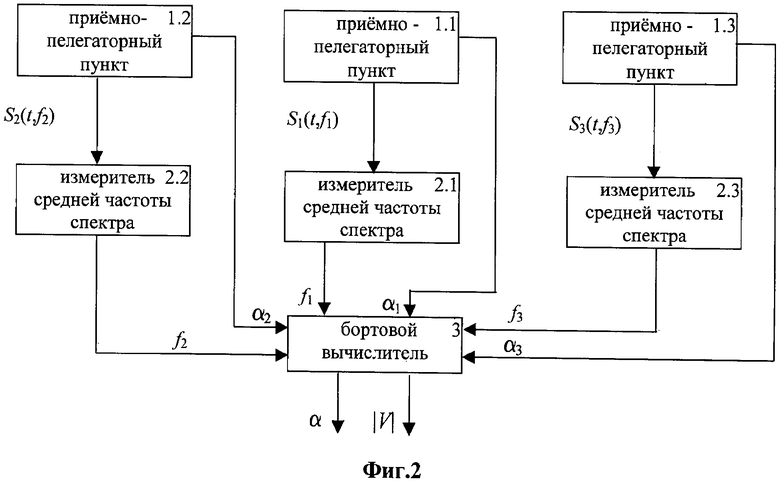
На фиг.2 представлена структурная схема устройства, реализующего предлагаемый способ.
На фиг.3 представлена таблица, поясняющая образования доплеровского смещения частоты сигнала ИРИ и взаимосвязь между промежуточными и однозначными значениями параметров движения ИРИ со скоростью 300 м/с, частота излучения f0=100 МГц, применительно к схеме, изображенной на фиг.1 α1=100°, α2=140°, α3=60°.
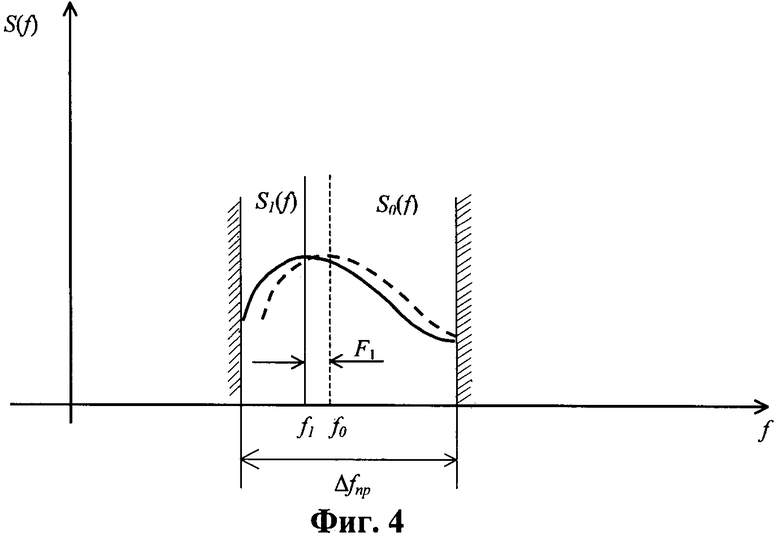
На фиг.4 изображен спектр принимаемого сигнала ИРИ в полосе пропускания приемника - Δfnp, возможность определения средней частоты спектра движущегося ири-f1, по сравнению с неподвижным - f0.
Устройство для определения параметров движения ИРИ содержит (Фиг.2) приемо-пеленгаторные пункты 1.1, 1.2, 1.3, сигнальные выходы S1 (t, f1), S2 (t, f2), S3 (t, f3) которых подключены к соответствующим измерителям средней частоты спектра 2.1, 2.2, 2.3, а пеленгационных выходы α1, α2, α3 и выходы от измерителей средней частоты f1, f2, f3 подключены к бортовому вычислителю 3 ведущего приемо-пеленгаторного пункта 1.2.
Способ основан на измерении доплеровского смещения частоты сигнала движущегося ИРИ тремя разнесенными приемо-пеленгаторными пунктами 1.1, 1.2, 1.3. Все углы в схеме отсчитываются относительно одного направления (северный меридиан, фиг.1). Доплеровские смещения частоты сигнала ИРИ, принимаемые в трех приемо-пеленгаторных пунктах F1, F2, f3, образуются как результат проекции вектора скорости ИРИ -  на соответствующие линии пеленгов (Фиг.3). Выразив проекционные углы вектора скорости на соответствующие линии пеленгов через α1, α2, α3, α, получим систему трех уровней с тремя неизвестными α, V,f0
на соответствующие линии пеленгов (Фиг.3). Выразив проекционные углы вектора скорости на соответствующие линии пеленгов через α1, α2, α3, α, получим систему трех уровней с тремя неизвестными α, V,f0
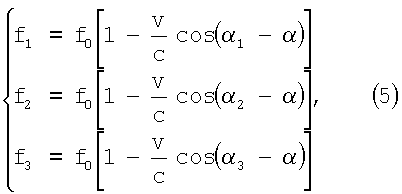
где f0 - частота излучения сигнала ИРИ. Решения системы уравнений (5) относительно а и V имеет промежуточные значения, поскольку существует неоднозначность определения угла α и знака скорости V. Кроме того, формулы определения скорости (2) являются разрывными функциями при значениях аргумента f1=f2, f1=f3, f2=f3, что соответствует направлению движения ИРИ по биссектрисам углов, образованных линиями соответствующих пеленгов. Поскольку невозможно одновременное движение ИРИ по двум и более биссектрисам, совместная неопределенность измерения скорости V12, V13, V23 исключена. Однозначность промежуточных значений параметров движения ИРИ определяют с помощью формул (3,4). Точность измерения параметров движения ИРИ - α, V определяется точностью измерения пеленгов - α1, α2, α3, точностью измерения частоты сигнала ИРИ - f1, f2, f3 и значением углов пересечения линий соответствующих пеленгов [Радиотехнические системы./ Под ред. Ю.И.Казаринова, М., «Высшая школа», 1990 г., стр.235-236].
Для минимизации погрешности, вызванной различием точности измерения параметров приемо-передающими пунктами 1.1, 1.2, 1.3, расчет модуля скорости движения ИРИ производят как усредненное значение от вычисленных по формулам (2).
где n=3 при f1≠f2, f1≠f3, f2≠f3;
n=2 в остальных случаях.
В предлагаемом способе носителем информации о скорости перемещения ИРИ является частота принимаемого сигнала - f.
Известно, что дисперсия измеряемой частоты равна [Радиотехнические системы./ Под ред. Ю.М.Казаринова, М., «Высшая школа», 1990 г., стр.134-136].

где TЭ - эффективная (среднеквадратическая) длительность сигнала, квадрат которой есть момент инерции фигуры под кривой |S(t)|/2E (под квадратом огибающей сигнала, нормированным так, чтобы площадь под ним была равна единице) относительно центра тяжести;
 - параметр обнаружения, равный отношению сигнал/шум на выходе фильтра, согласованного с обнаруживаемым сигналом S(t), для работы радиопеленгатора q≥10.
- параметр обнаружения, равный отношению сигнал/шум на выходе фильтра, согласованного с обнаруживаемым сигналом S(t), для работы радиопеленгатора q≥10.
Оценим потенциальную точность измерения частоты применительно к авиационному диапазону частот 100…400 МГц при скорости перемещения (полета) ИРИ V=1000 км/ч. Доплеровское смещение частоты сигнала ИРИ составит F=90…370 Гц.
Наиболее часто применяемым сигналом в этом диапазоне является радиотелефонный речевой сигнал, который представляет нестационарный случайный процесс. Однако изменение во времени его энергии можно считать постоянным на интервалах времени TЭ=10…30 мс, и на этих интервалах можно рассматривать радиотелефонный сигнал как детерминированную функцию [Повышение точности определения местоположения источников узкополосных радиоизлучений многопозиционной разностно - дальномерной системой, О.В.Король и др., М., «Радиотехника», 1998 г., №5, стр.79-81].
Дисперсия измерения частоты радиотелефонного речевого сигнала составит:

Из (6) следует, что в рассмотренном случае относительная погрешность измерения частоты радиотелефонного сигнала ИРИ составит 2-7% в зависимости от диапазона рабочих частот. Принцип работы устройства, реализующего заявляемый способ, заключается в следующем. На входе приемо-пеленгаторных пунктов 1.1, 1.2, 1.3 от ИРИ, движущегося со скоростью V, одновременно поступают сигналы S1(t,f1), S2(t,f2), S3(t,f3), по которым определяют направления на ИРИ (пеленги) α1, α2, α3, что является штатной операцией приемо-пеленгаторных пунктов 1.1, 1.2, 1.3. После селекции в пределах полосы пропускания приемников и усиления в приемо-пеленгаторных пунктах 1.1, 1.2, 1.3 сигналы ИРИ S1(t, f1), S2(t, f2), S3(t, f3), поступают на соответствующие измерители срдней частоты спектра 2.1, 2.2, 2.3, где определяют среднюю частоту спектра сигнала ИРИ с учетом доплеровского смещения
На фиг.3 представлены расчетные значения доплеровского смещения частоты F1, F2, F3.
Определим критерий, по которому измеряются частоты принимаемого сигнала ИРИ - f1, f2, f3. При приеме сигнала от движущегося ИРИ форма огибающей его спектра S(f) фиг.4 не изменяется. Она определяется видом модуляции и передаваемой информацией в данный момент времени (измерения). При этом составляющие спектра S1(f) сигнала движущегося ИРИ будут иметь доплеровское смещение частоты - F1 по отношению к составляющим спектра S0 (f) сигнала неподвижного ИРИ в пределах полосы пропускания приемника - Δfпр. Максимальную мощность в этом случае имеет сигнал на средней частоте спектра (энергетический центр спектра), значение которой измеряют для реализации способа. Это накладывает дополнительные требования к точности и идентичности измерения средней частоты спектра на каждом приемо-пеленгатором пункте и может быть реализовано с помощью цифровой обработки сигналов. Информация об пеленгах - α1, α2, α3, и значениях средней частоты спектра f1, f2, f3 сигналов движущегося ИРИ по каналам передачи данных поступают на бортовой вычислитель 3 ведущего приемо-пеленгаторного пункта 1.1. Вычисления производятся по алгоритмам в соответствии с формулами (1), (2), (3), (4). Измерения пеленгов - α1, α2, α3, средней частоты спектров сигналов ИРИ f1, f2, f3 и вычисления параметров движения ИРИ α и |V| производят синхронно в соответствии со штатным алгоритмом работы приемо-пеленгаторных пунктов 1.1, 1.2, 1.3.
Способ может быть реализован на действующей пеленгационной системе, состоящей из трех приемо-пеленгаторных пунктов 1.1, 1.2, 1.3, работающих в авиационном диапазоне частот 100…400 МГц, в перспективе - до 1225 МГц, где скорость летательных аппаратов-носителей ИРИ составляет 300…3000 км/час.
Из сказанного следует, что предлагаемый способ обеспечивает измерение таких важных параметров движения ИРИ, как местоположение, направление и модуль скорости движения ИРИ в реальном масштабе времени (по единичному измерению).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ВОЗДУШНОГО ОБЪЕКТА ДИНАМИЧЕСКОЙ СИСТЕМОЙ РАДИОТЕХНИЧЕСКОГО КОНТРОЛЯ | 2017 |
|
RU2660160C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ В БЛИЖНЕЙ ЗОНЕ | 2006 |
|
RU2308735C1 |
| ФАЗОВЫЙ ПЕЛЕНГАТОР | 2012 |
|
RU2519593C2 |
| СПОСОБ ИМИТАЦИИ МНОГОПОЗИЦИОННОЙ РАДИОЭЛЕКТРОННОЙ ОБСТАНОВКИ | 2007 |
|
RU2326399C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2007 |
|
RU2334244C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАКЛОННОЙ ДАЛЬНОСТИ ДО ДВИЖУЩЕЙСЯ ЦЕЛИ ПАССИВНЫМ МОНОСТАТИЧЕСКИМ ПЕЛЕНГАТОРОМ | 2014 |
|
RU2557808C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ДО ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2015 |
|
RU2580933C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2004 |
|
RU2263328C1 |
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ ОХРАНЯЕМОГО ОБЪЕКТА | 2002 |
|
RU2221279C1 |
| СПОСОБ СЛИЧЕНИЯ ШКАЛ ВРЕМЕНИ | 2005 |
|
RU2301437C1 |

Изобретение относится к области пассивной радиолокации и может быть использовано для определения параметров движения источника радиоизлучения (ИРИ). Достигаемым техническим результатом изобретения является увеличение количества (полнота) определяемых параметров движения ИРИ: местоположение, направление и модуль скорости движения ИРИ при высокой точности измерения 2-7% в зависимости от диапазона рабочих частот. Технический результат достигается за счет того, что в триангуляционном способе определения местоположения ИРИ путем измерения угловых направлений (пеленгов) на ИРИ - α1, α2, α3, из трех приемно-пеленгаторных пунктов, разнесенных друг от друга на расстояние, называемое базой, дополнительно одновременно в соответствующих приемо-пеленгаторных пунктах измеряют частоты принимаемого сигнала ИРИ - f1, f2, f3, вычисляют значения направления движения ИРИ - α и модуль скорости -|V| по соответствующим формулам. Способ может быть реализован на действующей пеленгационной системе, состоящей из трех приемо-пеленгаторных пунктов, например в авиационном диапазоне частот 100…400 МГц, в перспективе - до 1225 МГц, где скорость летательных аппаратов-носителей ИРИ составляет 300…3000 км/час. 4 ил.
Способ определения параметров движения источника радиоизлучения (ИРИ), основанный на определении местоположения ИРИ путем измерения угловых направлений (пеленгов) на ИРИ - α1, α2, α3 из трех приемно-пеленгаторных пунктов, разнесенных друг от друга на расстояние, называемое базой, отличающийся тем, что одновременно в соответствующих приемно-пеленгаторных пунктах измеряют частоты принимаемого сигнала ПРИ - f1, f2, f3, вычисляют промежуточные значения направления движения ИРИ

и скорости движения ИРИ по формулам

при f1≠f2;

при f1≠f3;

при f2≠f3,
определяют однозначные значения направления движения ИРИ
и модуля скорости движения ИРИ
где c - скорость распространения сигнала ИРИ;
| Теоретические основы радиолокации | |||
| Под ред | |||
| ШИРМАНА Я.Д | |||
| - М.: Советское радио, 1970, с.494-496 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2006 |
|
RU2327181C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ В БЛИЖНЕЙ ЗОНЕ | 2006 |
|
RU2308735C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ (ВАРИАНТЫ) И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2298805C2 |
| US 6163297 A, 19.12.2000 | |||
| US 5361073 A, 01.11.1994 | |||
| Способ изготовления ферритовыхСЕРдЕчНиКОВ МАгНиТНыХ гОлОВОК | 1979 |
|
SU834748A1 |
| US 5835060 A, 10.11.1998 | |||
| US 6275189 B1, 14.08.2001. | |||

