Изобретение относится к области пассивной радиолокации и может быть использовано для определения местоположения источников радиоизлучения (ИРИ) в ближней зоне (в зоне дифракции Френеля) приемной антенны по степени кривизны волнового фронта в радиотехнических устройствах ближнего действия, предназначенных для радиомониторинга, нелинейной радиолокации и радионавигации.
Известен способ измерения направления (пеленга) на ИРИ с использованием эффекта Доплера (Вартанесян В.А. «Радиоэлектронная разведка», М., - Воениздат, 1975 г., стр.232-236).
Способ основан на сравнении, обусловленном эффектом Доплера, фазовой модуляции сигнала, принимаемого вращающейся по окружности антенной с фазой опорного генератора.
Недостатком способа является то, что для определения местоположения ИРИ требуется применение многопозиционного метода.
Известен однопозиционный способ определения местоположения источника радиоизлучения, основанный на нелинейном эффекте перекрестной модуляции сигнала, формирующегося в передатчике источника радиоизлучения внешним мощным облучающим импульсным полем (Авдеев В.Б., Панычев С.Н. «Нелинейная радиодальнометрия источника радиоизлучения методом преднамеренной перекрестной модуляции его сигналов», Радиотехника, 2004 г., №9, стр.74-76).
Недостатком способа является сложность его реализации, вызванная необходимостью наличия передатчика большой импульсной мощности.
Наиболее близким по технической сущности и достигаемому эффекту к предлагаемому способу является способ оценки текущих координат источника радиоизлучения (Россия, авторское свидетельство №2231806, G01S 5/08, 2004 г.), заключающийся в приеме излучаемого целью радиосигнала каждым элементом эквидистантной линейной антенной решетки (АР), усилении его в каждом приемном канале, измерении его частоты, формировании с помощью фазометров сигналов, пропорциональных разности фаз сигналов в центральном и каждом из приемных каналов, определении направления прихода сигнала, получении сигналов, пропорциональных разности разностей фаз, симметричных относительно центрального приемных каналов, дополнительном усилении этих сигналов, суммировании полученных сигналов, расчете дальности до источника излучения, а также осуществляют попарный вынос крайних элементов линейной эквидистантной АР и приблизительно равномерно их располагают на продольной оси АР в пределах зоны Френеля невынесенных элементов, определяют координаты и точки привязки к продольной оси АР вынесенных элементов, а также производят фазирование каналов, предварительно оценивая дальность до источника излучения с учетом значений фазы принимаемого сигнала на вынесенных элементах, уточнение координат и устранение неоднозначности оценки дальности на основе алгоритма стохастической аппроксимации.
Недостатки способа:
- способ требует последовательного выполнения 13 объемных операций, в том числе механического перемещения съемных антенных элементов вместе с приемниками, жесткой привязки параметров АР к частоте принимаемого сигнала;
- невозможность одновременного определения местоположения нескольких ИРИ из-за необходимости изменения параметров антенной решетки;
- сложность практической реализации.
Технический результат предлагаемого изобретения заключается в существенном сокращении времени определения местоположения ИРИ в ближней зоне путем уменьшения числа операций обработки сигнала и их объема; в возможности одновременного определения местоположения более одного ИРИ.
Указанный результат достигается тем, что в известном способе определения местоположения источника радиоизлучения в ближней зоне, включающем прием радиосигнала двухканальным приемным трактом, усиление его в обоих приемных каналах, измерение частоты принятого радиосигнала, определение направления его прихода и дальности до источника радиоизлучения дополнительно в одном из каналов приемного тракта создают искусственный доплеровский сдвиг частоты за счет вращения антенны в горизонтальной плоскости с постоянной угловой скоростью, выделяют экстремумы доплеровского сдвига частоты как функции углового положения вращающейся антенны, измеряют угловые расстояния между направлением, принятым за начало отсчета угла поворота вращающейся антенны, и направлениями, соответствующими экстремумам доплеровского сдвига частоты, и по их значениям определяют местоположение источника радиоизлучения по формулам:
азимут 
дальность 
где r - радиус окружности вращения антенны, обеспечивающей искусственный доплеровский сдвиг частоты принимаемого сигнала;
λ - длина волны принимаемого сигнала;
α1, α2 - измеренные угловые расстояния между направлением, принятым за начало отсчета угла поворота вращающейся антенны, и направлениями, соответствующими экстремумам доплеровского сдвига частоты.
Приведенная последовательность отличительных операций позволяет обеспечивать обработку сигналов с использованием эффекта Доплера и определять местоположение n ИРИ с различных направлений за время  одного оборота вращающейся антенны 2.2. Возможность определения местоположения n ИРИ с различных направлений реализуется за счет последовательной угловой селекции сигналов экстремумов функции доплеровского сдвига частоты относительно условно принятого начала отсчета.
одного оборота вращающейся антенны 2.2. Возможность определения местоположения n ИРИ с различных направлений реализуется за счет последовательной угловой селекции сигналов экстремумов функции доплеровского сдвига частоты относительно условно принятого начала отсчета.
В способе-прототипе обработка сигнала только одного ИРИ требует выполнения громоздких операций, связанных с жесткой привязкой параметров АР к частоте и априорному направлению принимаемого сигнала; механического выноса части элементов АР вместе с приемниками и определение их координат путем поочередного излучения элементов АР на частоте сигнала и т.д.
Проведенный анализ уровня техники позволяет установить, что технические решения, характеризующиеся совокупностью признаков, идентичных всем признакам, содержащимся в предложенной заявителем формуле изобретения, отсутствуют, что указывает на соответствие заявленного изобретения критерию охраноспособности «новизна».
Результаты поиска известных решений в данной и смежной областях техники с целью выявления признаков, совпадающих с отличительными признаками заявляемого устройства, показали, что в общедоступных источниках информации не выявлены решения, имеющие признаки, совпадающие с его отличительными признаками. Из уровня техники также не подтверждена известность влияния отличительных признаков заявляемого изобретения на указанный заявителем технический результат. Следовательно, заявленное изобретение соответствует условию «изобретательский уровень».
Предлагаемое техническое решение промышленно применимо, так как совокупность характеризующих его признаков обеспечивает возможность его существования, работоспособность и воспроизводимость, так как для реализации заявляемого технического решения могут быть использованы известные материалы и оборудование.
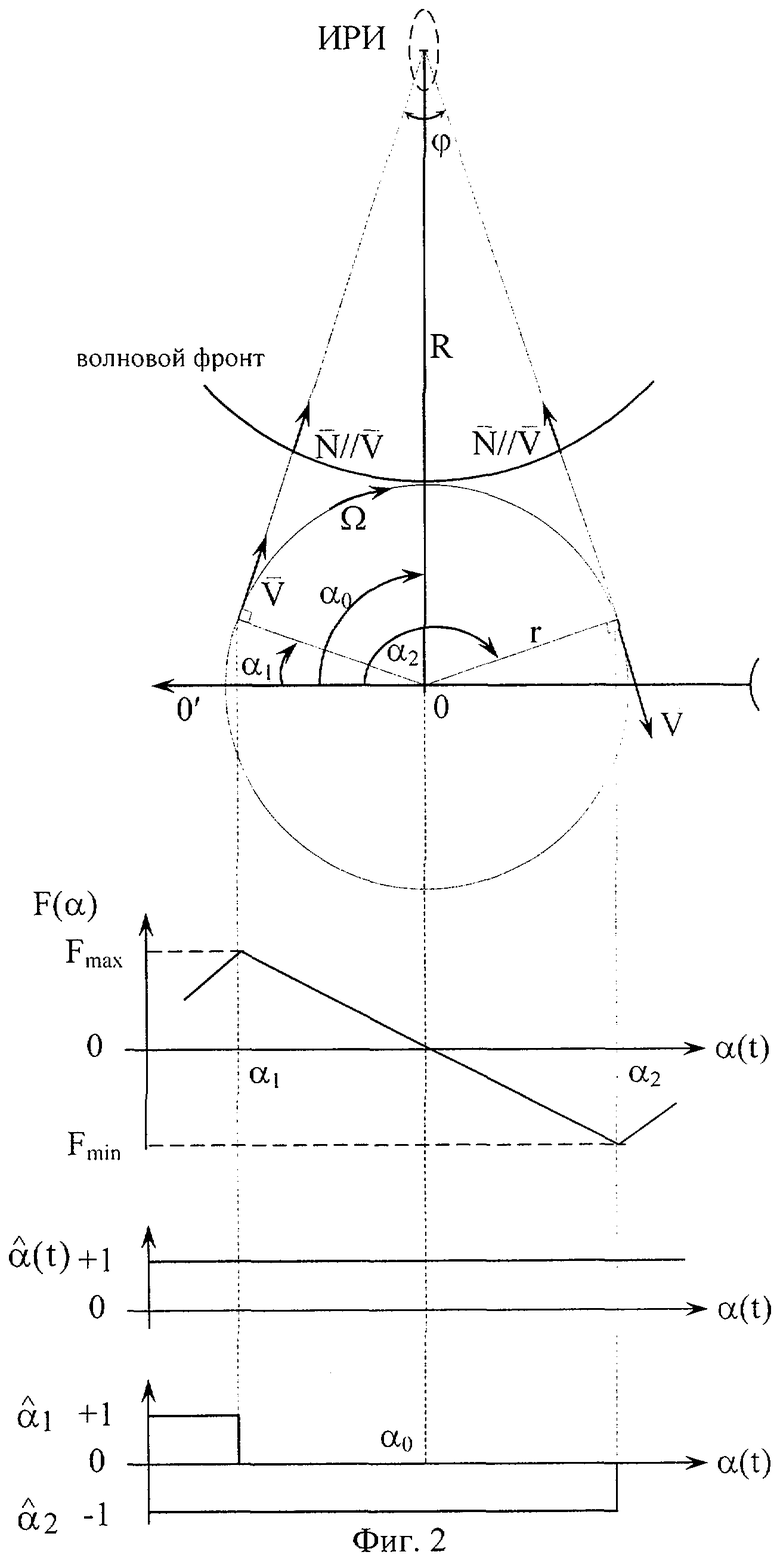
На фиг.1 представлена структурная схема устройства, реализующего предлагаемый способ.
На фиг.2 представлена иллюстрация сущности предлагаемого способа определения местоположения ИРИ в ближней зоне.
Устройство состоит из двух приемных каналов 1.1, 1.2. В первом приемном канале 1.1 неподвижная ненаправленная антенна 2.1 подключена к приемному устройству 3.1, а во втором приемном канале 1.2 - вращающаяся ненаправленная антенна 2.2 подключена к приемному устройству 3.2, линейные выходы приемных устройств 3.1; 3.2 подсоединены к соответствующим входам обнаружителя экстремумов функции 4, выход которого параллельно подсоединен к входам угловых селекторов 5.1...5.n., выходы которых подсоединены к соответствующим входам вычислителя-индикатора 6. При этом второй выход вращающейся антенны 2.2 через датчик положения антенны 7 параллельно подключен ко вторым входам угловых селекторов 5.1...5.n., а второй выход приемного устройства 3.2 через измеритель частоты 8 подключен ко второму входу вычислителя-индикатора 6.
Устройство работает следующим образом:
Сигнал ИРИ с частотой f1 принимается ненаправленными антеннами 2.1; 2.2, в приемном канале 1.2 с вращающейся антенной 2.2 создают искусственный доплеровский сдвиг частоты принимаемого сигнала

Операция создания искусственного доплеровского сдвига частоты принимаемого сигнала реализуется за счет механического или электронного вращения ненаправленной антенны 2.2 по окружности радиусом r в горизонтальной плоскости с постоянной угловой скоростью Ω.
Известно, что в ближней зоне информация о дальности до ИРИ содержится в степени сферичности волнового фронта, поэтому в предлагаемом способе степень сферичности волнового фронта измеряется угловыми положениями α1 и α2 вращающейся антенны 2.2, при которых доплеровский сдвиг частоты принимаемого сигнала будет иметь постоянные экстремумы Fmax(α1) и Fmin(α2).
Угловые положения вращающейся антенны 2.2 α1 и α2 соответствуют условиям коллинеарности векторов линейной скорости  антенны 2.2 и нормали волнового фронта
антенны 2.2 и нормали волнового фронта  ,
,  , а линии положения векторов образуют центральный угол сферы (см. фиг.2)
, а линии положения векторов образуют центральный угол сферы (см. фиг.2)

Операция выделения экстремумов доплеровского сдвига частоты осуществляется обнаружителем экстремумов функции 4, представляющим собой двухканальный квадратурный корреляционный приемник (Казаринов Ю.М., «Радиотехнические системы», М., - Высшая школа, 1990 г., стр.99), в котором пара опорных гетеродинов создает сигналы с частотами Fmax и Fmin.
Операция измерения угловых расстояний между направлением, принятым за начало отсчета угла поворота антенны 2.2 (OO' на фиг.2) и направлениями, соответствующими экстремумам доплеровского сдвига частоты, осуществляется с помощью угловых селекторов 5.1...5.n, на вторые входы которых подается угловое положение α(t) антенны 2.2, преобразованное датчиком углового положения 7 в цифровой код  указанный на эпюрах фиг.2 в виде знаковой функции +1. Практическая реализация угловых селекторов 5.1...5.n может быть выполнена на цифровых компараторах.
указанный на эпюрах фиг.2 в виде знаковой функции +1. Практическая реализация угловых селекторов 5.1...5.n может быть выполнена на цифровых компараторах.
Операция вычисления координат местоположения ИРИ на основе измеренных угловых расстояний  и
и  в цифровом коде положения вращающейся антенны 2.2, изображенном на эпюрах фиг.2 в виде знаковой функции ±1 соответственно, выполняется по формулам (1), (2) вычислителем-индикатором 6, реализованном на базе микроконтроллера, совмещенного с индикатором.
в цифровом коде положения вращающейся антенны 2.2, изображенном на эпюрах фиг.2 в виде знаковой функции ±1 соответственно, выполняется по формулам (1), (2) вычислителем-индикатором 6, реализованном на базе микроконтроллера, совмещенного с индикатором.
Частота сигнала, принятого приемным устройством 3.1, определяется в измерителе частоты 8, преобразуется в цифровой код  и поступает на второй вход вычислителя-индикатора 6.
и поступает на второй вход вычислителя-индикатора 6.
В вычислителе-индикаторе осуществляется селекция координат местоположения ИРИ по частоте принимаемого сигнала и их индикация в форме, удобной для считывания (f; α0; R).
Известно, что пассивная радиолокация ИРИ путем измерения степени кривизны волнового фронта ограничена по дальности и имеет практическое применение в ближней зоне приемной антенны (до сотен метров в зависимости от размеров антенной системы).
Предлагаемый способ измерения местоположения ИРИ имеет круговую рабочую зону с потенциальной точностью определения:
азимута 
дальности 
где  и
и  - среднеквадратические значения погрешности измерения угловых расстояний между направлением, принятым за начало отсчета угла поворота антенны, и направлениями, соответствующими экстремумам доплеровского сдвига частоты.
- среднеквадратические значения погрешности измерения угловых расстояний между направлением, принятым за начало отсчета угла поворота антенны, и направлениями, соответствующими экстремумам доплеровского сдвига частоты.
Потенциальная точность измерения угловых расстояний и определяется отношением пикового значения напряжения полезного сигнала Е на входе обнаружителя экстремумов функции к среднеквадратическому напряжению шума N0 и времени обнаружения экстремумов функции Т0 (Казаринов Ю.М. «Радиотехнические системы», М., - Высшая школа, 1990 г., стр.135)

Из (6), (7) следует, что верхняя граница измерения дальности до ИРИ может быть повышена за счет оптимальной обработки сигналов в приемных устройствах 3.1, 3.2 и обнаружителе экстремумов функции 4, а также за счет увеличения радиуса окружности вращающейся антенны (r≡sin(α2-α1)).
Таким образом, предлагаемый способ позволяет сократить время определения местоположения ИРИ за счет уменьшения числа операций обработки сигнала и их объема, одновременно определять местоположение более одного ИРИ с различных направлений при сохранении потенциальной точности, не худшей, чем у способа-прототипа.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2008 |
|
RU2380723C1 |
| СИСТЕМА ОБНАРУЖЕНИЯ ПОДВОДНЫХ И НАДВОДНЫХ ОБЪЕКТОВ | 2017 |
|
RU2670176C1 |
| Способ одноэтапного адаптивного определения координат источников радиоизлучений | 2021 |
|
RU2768011C1 |
| Способ повышения точности пеленгования источников радиоизлучения обнаружителем-пеленгатором с многошкальной антенной системой | 2019 |
|
RU2713235C1 |
| Способ обнаружения и азимутального пеленгования наземных источников радиоизлучения с летно-подъемного средства | 2020 |
|
RU2732505C1 |
| Способ амплитудно-фазовой пеленгации системой с вращающимися антаннами | 2020 |
|
RU2750335C1 |
| Система пассивной локации для определения координат летательного аппарата в ближней зоне аэродрома и на этапе захода на посадку с резервным каналом определения дальности | 2016 |
|
RU2633380C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ВОЗДУШНОГО ОБЪЕКТА ДИНАМИЧЕСКОЙ СИСТЕМОЙ РАДИОТЕХНИЧЕСКОГО КОНТРОЛЯ | 2017 |
|
RU2660160C1 |
| Способ контроля излучения источника в заданном направлении | 2019 |
|
RU2713514C1 |
| Способ контроля излучения нескольких источников частотно-неразделимых сигналов | 2019 |
|
RU2704027C1 |
Изобретение относится к области пассивной радиолокации. Технический результат предлагаемого изобретения заключается в сокращении времени определения местоположения ИРИ в ближней зоне и в возможности одновременного определения местоположения более одного ИРИ. Указанный результат достигается за счет того, что осуществляют прием радиосигнала двухканальным приемным трактом, измеряют частоту принятого радиосигнала, в одном из каналов приемного тракта создают искусственный доплеровский сдвиг частоты за счет вращения антенны в горизонтальной плоскости с постоянной угловой скоростью, выделяют экстремумы доплеровского сдвига частоты как функции углового положения вращающейся антенны, измеряют угловые расстояния между направлением, принятым за начало отсчета угла поворота вращающейся антенны, и направлениями, соответствующими экстремумам доплеровского сдвига частоты, и по их значениям определяют местоположение источника радиоизлучения по формулам: азимут 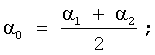 дальность
дальность  где r - радиус окружности вращения антенны, обеспечивающей искусственный доплеровский сдвиг частоты принимаемого сигнала; λ - длина волны принимаемого сигнала; α1, α2 - измеренные угловые расстояния между направлением, принятым за начало отсчета угла поворота вращающейся антенны, и направлениями, соответствующими экстремумам доплеровского сдвига частоты. 2 ил.
где r - радиус окружности вращения антенны, обеспечивающей искусственный доплеровский сдвиг частоты принимаемого сигнала; λ - длина волны принимаемого сигнала; α1, α2 - измеренные угловые расстояния между направлением, принятым за начало отсчета угла поворота вращающейся антенны, и направлениями, соответствующими экстремумам доплеровского сдвига частоты. 2 ил.
Способ определения местоположения источника радиоизлучения в ближней зоне, включающий прием радиосигнала двухканальным приемным устройством в ближней зоне, отличающийся тем, что в одном из приемных каналов с неподвижной ненаправленной антенной измеряют частоту принятого радиосигнала, а в другом приемном канале с вращающейся ненаправленной антенной создают искусственный доплеровский сдвиг частоты за счет вращения антенны в горизонтальной плоскости с постоянной угловой скоростью, при этом выходы приемных каналов подсоединены к соответствующим входам обнаружителя экстремумов для выделения экстремумов доплеровского сдвига частоты как функции углового положения вращающейся ненаправленной антенны, измеряют угловые расстояния между направлением, принятым за начало отсчета угла поворота вращающейся ненаправленной антенны, и направлениями, соответствующими экстремумам доплеровского сдвига частоты, и по их значениям определяют местоположение источника радиоизлучения по формулам
азимут 
дальность 
где r - радиус окружности вращающейся антенны, обеспечивающей искусственный доплеровский сдвиг частоты принимаемого сигнала;
λ - длина волны принимаемого сигнала;
α1, α2 - измеренные угловые расстояния между направлением, принятым за начало отсчета угла поворота антенны, и направлениями, соответствующими экстремумам доплеровского сдвига частоты.
| СПОСОБ ОЦЕНКИ ТЕКУЩИХ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2002 |
|
RU2231806C2 |
| СПОСОБ ПЕЛЕНГОВАНИЯ ИСТОЧНИКА РАДИОСИГНАЛА | 2003 |
|
RU2251707C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2004 |
|
RU2258941C1 |
| СПОСОБ МЕСТООПРЕДЕЛЕНИЯ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ | 2002 |
|
RU2248584C2 |
| US 5512909 А, 30.04.1996 | |||
| US 6239746 B1, 29.05.2001 | |||
| US 6577272 B1, 10.06.2003 | |||
| ЕР 1471364 А2, 27.10.2004. | |||

