Изобретение относится к радиотехнике, а именно к пассивной радиолокации, и может быть использовано в системах радиоконтроля при решении задачи скрытного определения координат объектов-носителей источников радиоизлучения (ИРИ), преимущественно станций УКВ-диапазона, работающих за пределами дальности радиогоризонта.
Известен способ пассивного определения дальности до ИРИ - излучающей обзорной радиолокационной станции (РЛС), использующий радиопеленгатор с дополнительным приемным пунктом [1]. Определение дальности достигается путем измерения интервала времени прохождения луча сканирующей антенны РЛС по измерительной базе, образованной антенной пеленгатора и антенной дополнительного приемного пункта. Способ применим для определения дальности до РЛС со сканирующими узконаправленными антеннами, что является его ограничением и, в известной степени, недостатком.
Также известен способ [2], позволяющий определять дальность до ИРИ с направленной антенной, как сканирующей, так и неподвижной, ориентированной своим главным лепестком на антенну пеленгатора. Измерительная база из трех приемных пунктов осуществляет съем пропорциональных напряженности поля амплитуд сигнала, по которым восстанавливается главный лепесток антенного луча ИРИ в линейной мере. Дальность до ИРИ определяется отношением рассчитанной ширины антенного луча ИРИ в линейных единицах к извлеченному из базы данных значению ширины антенного луча в угловой радианной мере.
Оба способа имеют общий недостаток: не представляется возможным измерять дальность до источников излучения с всенаправленными антеннами, которые имеют, как известно, большинство связных радиостанций.
Наиболее близким по технической сущности к предлагаемому способу следует признать общеизвестный триангуляционный способ, принятый в качестве прототипа. Способ основан на измерении направлений на ИРИ в двух приемных пунктах, разнесенных на известную измерительную базу, и вычислении дальности до ИРИ по известной базе и измеренным направлениям [3, стр. 496].
Недостатки способа-прототипа:
- большой и сложный аппаратурный состав, требующий не менее двух высокоточных радиопеленгаторов;
- большая измерительная база, зачастую соизмеримая с дальностью до объекта ввиду ограниченной точности пеленгования, определяемой размером апертуры антенной системы радиопеленгатора (особенно в нижней части УКВ диапазона), что ограничивает применимость способа на одном подвижном объекте-носителе радиопеленгаторов;
- необходимость иметь каналы связи (радиосвязи) для передачи в пункт обработки данных результатов измерения направлений.
Целью изобретения является:
- упрощение аппаратурного состава;
- уменьшение измерительной базы до величины, приемлемой для объекта-носителя аппаратуры;
- исключение (ввиду уменьшения измерительной базы) каналов радиосвязи.
Техническим результатом изобретения является возможность определения дальности до ИРИ, работающих за пределами радиогоризонта, антенны которых могут быть всенаправленными или остронаправленными, сканирующими или неподвижными.
Определение дальности основывается на измерении так называемого угла охвата измерительной базы, т.е. угла, под которым ИРИ «видит» измерительную базу.
Для достижения указанного технического результата предлагается способ определения дальности до источника радиоизлучения, включающий:
- обнаружение, пеленгование и измерение несущей частоты сигнала ИРИ пеленгатором, имеющим не менее трех приемных пунктов, антенны которых образуют линейную измерительную базу пеленгатора и одновременно входят в состав двух корреляционных радиоинтерферометров (КРИ) [4];
- измерение угла охвата, под которым ИРИ «видит» базу КРИ как алгебраическую разность направлений на ИРИ, измеренных корреляционными интерферометрами;
- вычисление дальности до ИРИ как отношение проекции базы КРИ на плоскость фронта приходящего от ИРИ сигнала к углу охвата базы КРИ, выраженному в радианах.
Технический результат достигается тем, что в предлагаемом способе определения дальности угол охвата, под которым ИРИ «видит» базу КРИ, определяется алгебраической разностью измеренных направлений на ИРИ двумя разнесенными в горизонтальной плоскости радиоинтерферометрами.
Использование радиоинтерферометров позволяет существенно упростить аппаратурный состав путем замены сплошных антенн радиопеленгаторов простыми (например, штыревыми) антенными элементами, образующими измерительные базы КРИ, иметь при этом высокую точность измерения направления на ИРИ и достаточно малую измерительную базу и, как следствие, исключить каналы радиосвязи между приемными пунктами.
Предлагаемый способ поясняется чертежами.
Фиг. 1. Принцип измерения угла охвата.
Фиг. 2. Структурная схема устройства определения дальности до ИРИ.
На чертежах приняты следующие обозначения:
Фиг. 1a. Направления на ИРИ близки к траверзным по отношению к базе.
Фиг. 1б. Направления на ИРИ отличаются от траверзных.
1, 2, 3 - антенные элементы фазового пеленгатора, 1 и 2 - антенные элементы первого корреляционного радиоинтерферометра (КРИ), 2 и 3 - второго КРИ;
4 - местоположение ИРИ;
5, 6 - фазовые центры 1-го и 2-го КРИ;
l - база КРИ;
7, 8 - нормали к базам КРИ;
α1 и α2 - направления на ИРИ, измеренные 1-ми 2-м КРИ (положительное направление - вправо от нормали, отрицательное - влево от нормали к базе);
Δα - угол охвата базы КРИ.
Фиг. 2.
1, 2, 3 - антенные элементы фазового пеленгатора, образующие линейную измерительную базу,
- 1, 2 - базу 1-го КРИ;
- 2, 3 - базу 2-го КРИ;
4 - приемно-пеленгаторный блок, вычислитель курсового угла 5 и частоты сигнала ИРИ 6;
7 - частотно-перестраиваемые фильтры;
8 - управляемые фазовращатели, 8а - перемещающие электрическую ось КРИ влево, 8б - вправо;
9 - перемножители принятых сигналов;
10 - фазовые различители;
11, 12 - выходы перемножителей 9;
13, 14, 18, 19 - цепи управления фазовращателями 8;
15, 20 - сигналы «останов фазовращателей»;
16, 17, 21, 22 - отсчеты фазовращателей;
23 - вычислитель угла охвата базы КРИ;
24 - вычислитель дальности до ИРИ;
25 - код дальности ИРИ;
26 - сигнал подтверждения приема кода дальности;
27 - сигнал сброса в нуль фазовращателей.
Способ определения дальности до ИРИ осуществляется следующим образом.
1. Сигналы, излученные ИРИ, принимаются антенными элементами, образующими линейную измерительную базу пеленгатора и одновременно входящими в состав 1-го и 2-го корреляционных радиоинтерферометров (КРИ).
2. Принятые сигналы обнаруживаются, пеленгуются и производится измерение их параметров излучения, в том числе несущей частоты (длины волны).
3. Сигналы обрабатываются 1-ми 2-м КРИ, каждый из которых определяет направление на ИРИ (α1 или α2 на фиг. 1) как отклонение от нормали к базе ИРИ, взятое со своим знаком (плюс - вправо, минус - влево от нормали), которое управляется фазовращателями 8б и 8а соответственно, алгебраическая сумма отсчетов фазы которых характеризует направление на ИРИ (α1 или α2), а алгебраическая разность сумм принимается за меру угла охвата Δα, под которым ИРИ «видит» базу КРИ.
4. Вычисляется дальность до ИРИ как отношение проекции базы радиоинтерферометра на плоскость фронта приходящего от ИРИ сигнала к углу охвата базы радиоинтерферометра, выраженному в радианах.
Устройство (фиг. 2), в котором реализуется предложенный способ, содержит:
- фазовый пеленгатор с антенными элементами 1, 2, 3 и приемно-пеленгаторным блоком 4;
- 1-й и 2-й радиоинтерферометры, в каждый из которых входят два антенных элемента (1 и 2 для первого, 2 и 3 - для второго радиоинтерферометра), два частотно-перестраиваемых фильтра 7, два управляемых фазовращателя 8а и 8б, перемножитель принятых сигналов 9 и фазовый различитель 10;
- вычислитель угла охвата базы интерферометра 23;
- вычислитель дальности до ИРИ 24.
Фазовый пеленгатор построен по схеме двухбазового интерферометра (см. [3], с. 300, рис. 5.66), обнаружение сигнала ИРИ и определение его несущей частоты осуществляется в частотной области с использованием преобразования Фурье [5].
Антенные элементы 1, 2, 3 могут быть различного типа, преимущественно с вертикальной поляризацией, чаще всего используемой в УКВ-радиостанциях.
Входящие в радиоинтерферометры перемножители 9, фазовые различители 10 - традиционные устройства, имеющиеся в каталогах фирм HEWLLET PACKARD и ANALOG DEVICES; в качестве управляемых фазовращателей могут быть использованы квадратурные фазовые модуляторы этих же фирм [6], [7], [8], частотно-перестраиваемые фильтры 7 описаны в [9], [10], [11], плавная частотная перестройка в них осуществляется варакторами.
Оригинальные элементы структурной схемы фиг. 2 - вычислитель угла охвата 23 и вычислитель дальности 24 - выполнены в цифровой форме и содержат АЦП и соответствующие функциональные преобразователи.
Выход 25 устройства фиг.2 представляет дальность до ИРИ в цифровом коде, который транслируется потребителю, от потребителя получают сигнал 26 подтверждения приема кода дальности.
Устройство (фиг. 2), реализующее способ определения дальности до ИРИ, работает следующим образом. Радиосигналы ИРИ принимаются антенными элементами 1, 2, 3, образующими линейную измерительную базу пеленгатора, и поступают в приемно-пеленгаторный блок 4, где когерентно усиливаются в полосе частот, существенно превышающей ширину спектра одиночного сигнала ИРИ, и после оцифровывания подвергаются Фурье-преобразованию. Спектр мощности сигнала опорного антенного элемента (например, первого) сравнивается с порогом обнаружения, и запоминаются частоты, на которых обнаружены сигналы ИРИ; также вычисляются направления на ИРИ относительно измерительной базы. Из запомненных частот выбирается частота ИРИ, дальность до которого необходимо определить, на эту частоту настраиваются фильтры 7 1-го и 2-го интерферометров, а в вычислителе угла охвата базы 23 рассчитывается ширина отдельного лепестка диаграммы направленности КРИ, определяющая максимальную однозначную величину угла охвата базы λ/2l и минимально возможную однозначную дальность до ИРИ 2l2/λ, где λ - длина волны сигнала ИРИ, l - база КРИ. Настроенные на выбранную частоту фильтры 7 пропускают сигналы выбранного ИРИ к фазовращателям 8а и 8б, установленным на нуль, и далее к входам перемножителей 9. На выходе перемножителя 9, например 1-го КРИ, возникает напряжение 11, по амплитуде и полярности соответствующее тому или иному лепестку диаграммы направленности КРИ в направлении на ИРИ. Напряжение 11 поступает в приемно-пеленгаторный блок 4 для выработки сигналов управления 13 и 14 фазовращателями 8а и 8б соответственно, а также в фазовый различитель 10, который фиксирует переход через нуль амплитуд двух соседних лепесков диаграммы направленности КРИ, фазы которых пртивоположны, и вырабатывает сигнал «останов фазовращателей» 15, когда крутизна пеленгаторной характеристики радиоинтерферометра и точность измерения им направления на ИРИ наибольшая. В зависимости от нахождения направления на ИРИ влево или вправо от максимума (или минимума) интерференционного лепестка диаграммы направленности интерферометра включается управление 13 или 14 аттенюатором 8а или 8б, показания аттенюатора монотонно увеличиваются, а выходное напряжение 11 перемножителя 9 приближается к нулю до момента достижения упомянутой выше точки перехода через нуль, при этом сигнал управления блокируется и отсчеты аттенюаторов 16 и 17, характеризующие направление α1 (см. фиг. 1), измеряемое 1-м КРИ, транслируются в вычислитель угла охвата базы 23.
Аналогичный процесс происходит во 2-м КРИ, когда по сигналу 12 его перемножителя 9 вырабатываются сигналы управления 18 и 19 фазовращателями 8а и 8б, и фазовый различитель 10 по достижении перехода через нуль вырабатывает сигнал «останов фазовращателей» 20, а отсчеты фазовращателей 21 и 22, характеризующие направление на ИРИ α2 (см. фиг. 1), транслируются в вычислитель угла охвата базы 23. Вычислитель угла охвата базы 23 выполняет операции:
- вычисление алгебраической разницы отсчетов 1-го и 2-го КРИ с учетом того, что знак минус - у отсчетов фазовращателей 8а и знак плюс - у аттенюаторов 8б;
- проверка: разность отсчетов должна быть не более 180°, т.е. угол охвата базы должен быть не более ширины отдельного лепестка ДН КРИ;
- вычисление угла охвата базы Δα по формуле:
 ,
,
где λ - длина волны сигнала ИРИ;
l - измерительная база КРИ;
Δ - алгебраическая разность отсчетов фазовращателей,
и выдает код угла охвата Δα в вычислитель дальности 24. Вычислитель дальности 24 определяет дальность до ИРИ по формуле:
 ,
,
где КУ - направление на ИРИ (курсовой угол ИРИ) относительно измерительной базы пеленгатора;
Δα - угол охвата базы КРИ, радиан.
Код дальности 25 с выхода вычислителя дальности 24 транслируется потребителю и после получения от потребителя подтверждения о получении 26 в приемно-пеленгаторном блоке 4 осуществляется переход на следующую из запомненных несущих частот ИРИ, и процесс повторяется.
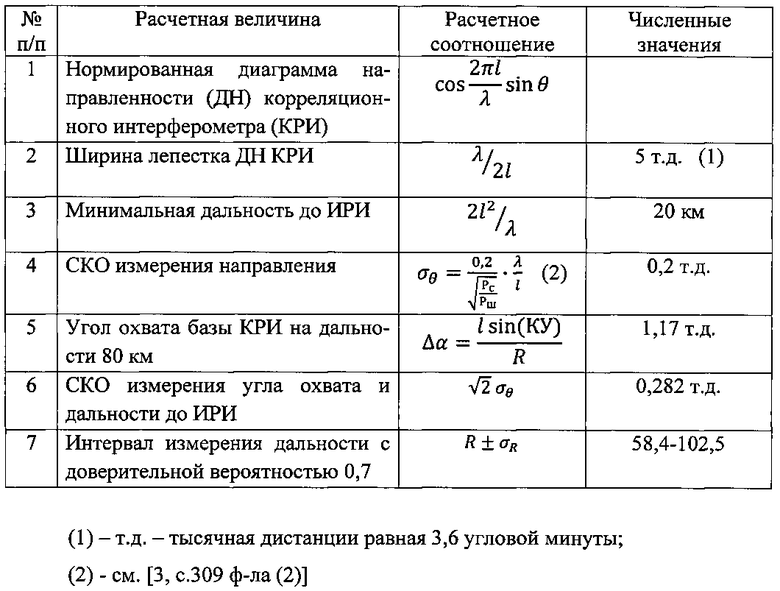
Достижимость технического результата изобретения подтверждается расчетами пассивного измерения дальности для следующих условий (см. таблицу):
- устройство располагается на корабле длиной не менее 200 м;
- база радиоинтерферометра l=100 м;
- длина волны ИРИ λ=1 м;
- дальность до ИРИ 80 км;
- курсовой угол ИРИ КУ=70°;
- отношение сигнал/шум в месте приема  .
.
Таким образом, за счет введения операций:
- измерения угла охвата, под которым ИРИ «видит» базу КРИ как алгебраическую разность направлений на ИРИ, измеренных корреляционными интерферометрами (КРИ);
- вычисления дальности до ИРИ как отношение проекции базы КРИ на плоскость фронта приходящего от ИРИ сигнала к углу охвата базы КРИ, выраженному в радианах,
удается решить поставленную задачу с достижением технического результата.
Источники информации
1. Патент РФ №2444748 от 02.02.2010 г.
2. Патент РФ №2444749 от 26.07.2010 г.
3. Теоретические основы радиолокации, под ред. Я.Д. Ширмана. - М., Советское радио, 1970.
4. У. Христиансен, И. Хегбом. Радиотелескопы. - М., Мир, 1972.
5. Дрогалин В.В. и др. Алгоритмы оценивания угловых координат ИРИ, основанные на методах спектрального анализа. // Успехи современной радиоэлектроники. 1988, №2, с. 3-17.
6. Designer's Reference Manual, Analog Devices, Inc., 1996.
7. Hewlett Packard. Communications Components Designer's Cattalog, 1997.
8. Designer's Guide, Hittite Microwave Corporation, 2004.
9. Д.П. Андреев и др. Механически перестраиваемые приборы СВЧ и фильтры. М., Связь, 1973.
10. А.С. СССР №168814, Б.И., 1965, №5, с. 55.
11. А.С. СССР №208046, Б.И., 1968, №3, с. 54.
| название | год | авторы | номер документа |
|---|---|---|---|
| ФАЗОВЫЙ ПЕЛЕНГАТОР | 2000 |
|
RU2165628C1 |
| ФАЗОВЫЙ ПЕЛЕНГАТОР | 2001 |
|
RU2206901C1 |
| ФАЗОВЫЙ ПЕЛЕНГАТОР | 2001 |
|
RU2189609C1 |
| ФАЗОВЫЙ СПОСОБ ПЕЛЕНГАЦИИ И ФАЗОВЫЙ ПЕЛЕНГАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2450283C1 |
| ФАЗОВЫЙ ПЕЛЕНГАТОР МОДУЛИРОВАННЫХ СИГНАЛОВ | 1975 |
|
SU1840915A1 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ СОСТОЯНИЯ ОХРАНЯЕМОГО ОБЪЕКТА | 2011 |
|
RU2469408C1 |
| ФАЗОВЫЙ СПОСОБ ПЕЛЕНГАЦИИ | 2010 |
|
RU2429500C1 |
| ФАЗОВЫЙ СПОСОБ ПЕЛЕНГАЦИИ И ФАЗОВЫЙ ПЕЛЕНГАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2365931C2 |
| ФАЗОВЫЙ СПОСОБ ПЕЛЕНГАЦИИ И ФАЗОВЫЙ ПЕЛЕНГАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2435171C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЙ ПРИ АМПЛИТУДНО-ФАЗОВОЙ ПЕЛЕНГАЦИИ С БОРТА ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2432580C1 |


Изобретение относится к радиотехнике и может быть использовано в системах радиоконтроля при решении задачи скрытного определения координат объектов-носителей источников радиоизлучения (ИРИ). Техническим результатом изобретения является возможность определения дальности до ИРИ, преимущественно станций УКВ диапазона, работающих за пределами радиогоризонта, антенны которых могут быть всенаправленными или остронаправленными, сканирующими или неподвижными. 2 ил., 1 табл.
Способ определения дальности до источника радиоизлучения (ИРИ), включающий обнаружение, пеленгование и измерение несущей частоты сигнала ИРИ фазовым пеленгатором, имеющим не менее чем три приемных пункта, антенны которых образуют линейную измерительную базу пеленгатора и одновременно входят в состав 1-го и 2-го корреляционных радиоинтерферометров (КРИ), каждый из которых содержит перемножитель сигналов, два регулируемых фазовращателя и фазовый различитель отличающийся тем, что фазовращателями 1-го КРИ осуществляют переход через нуль показаний 1-го фазового различителя, фиксируя при этом алгебраическую сумму отсчетов фазовращателей, характеризующую направление на ИРИ относительно нормали к базе 1-го КРИ, фазовращателями 2-го КРИ осуществляют переход через нуль показаний 2-го фазового различителя, фиксируя при этом алгебраическую сумму отсчетов фазовращателей, характеризующую направление на ИРИ относительно нормали к базе 2-го КРИ, вычисляют алгебраическую разность упомянутых сумм отсчетов и принимают ее за меру угла охвата, под которым ИРИ «видит» базу КРИ, при этом мера пропорциональна углу охвата и обратно пропорциональна сектору однозначности диаграммы направленности КРИ, и вычисляют дальность до ИРИ как отношение проекции базы КРИ на плоскость фронта приходящего от ИРИ сигнала к углу охвата базы КРИ, выраженному в радианах.
| Теоретические основы радиолокации | |||
| Под ред ШИРМАНА Я.Д.,Москва, Советское радио, 1970, с.496 | |||
| СПОСОБ ПОЛЯРИЗАЦИОННО-ЧУВСТВИТЕЛЬНОГО РАДИОКОНТРОЛЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2014 |
|
RU2546330C1 |
| СПОСОБ СКРЫТНОЙ РАДИОЛОКАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ | 2013 |
|
RU2529483C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБНАРУЖЕНИЯ ОБЪЕКТОВ | 2001 |
|
RU2233456C2 |
| US 5923285 A, 13.07.1999 | |||
| EP 1471364 A2, 27.10.2004 | |||
| WO 2008094293 A2, 07.08.2008. | |||

