Изобретение относится к пассивной радиолокации и предназначено для определения местоположения источников радиоизлучения (ИРИ).
Известен способ обнаружения и определения координат ИРИ, включающий прием радиоизлучения ИРИ не менее чем в трех пространственно разнесенных пунктах приема с последующей передачей принятых сигналов на центральный пункт, определение квадрата модуля комплексных взаимных корреляционных функций и взаимного запаздывания моментов прихода электромагнитных волн (патент РФ №2285937, G01S 5/05, 2006 г.).
Данный способ имеет ограничения по точности определения местоположения ИРИ, излучающие узкополосные сигналы. Точность измерения взаимного запаздывания моментов прихода сигнала ИРИ в приемные пункты ограничивается временем взаимной корреляции сигналов. Длительность корреляционного импульса обратно пропорциональна полосе частот обрабатываемых сигналов («Теоретические основы радиолокации», под ред. Я.Д.Ширмана, М., «Сов. радио», 1970 г., стр.498, 499). Результаты моделирования в аналоге приведены для широкополосного сигнала с полосой частот 3 МГц.
Наиболее близким к предлагаемому по технической сущности и достигаемому положительному эффекту является угломерно-разностно-дальномерный способ определения местоположения ИРИ, включающий измерение из одной позиции пеленга на ИРИ и разности расстояний от ИРИ до двух приемных пунктов. Местоположение ИРИ определяется точкой пересечения линии пеленга с гиперболой соответствующей разности расстояний до ИРИ («Теоретические основы радиолокации», под ред. Я.Д.Ширмана, М., «Сов. радио», 1970 г., стр.497...511).
Практическая реализация корреляционно-базовой локации, к которой относятся аналог и прототип, связана с установлением соответствия между сигналами, принятыми в не менее двух приемных пунктах от одного и того же ИРИ, и определением относительного времени запаздывания τ. Показателем потенциальной точности измерения времени запаздывания является дисперсия относительной ошибки измерения, равная

где FЭ - эффективная ширина спектра комплексной огибающей сигнала;
 - параметр обнаружения, равный отношению сигнал/шум на выходе согласованного фильтра;
- параметр обнаружения, равный отношению сигнал/шум на выходе согласованного фильтра;
Е - амплитуда сигнала;
N0 - спектральная плотность шума,
(«Радиотехнические системы», М., «Высшая школа», 1990 г., стр.127...134).
Из (1) следует, что потенциальная точность измерения информационного параметра τ определяется энергией сигнала и эффективной шириной спектра комплексной огибающей сигнала. Точность определения местоположения ИРИ данным способом завис от класса сигнала, вида и параметров модуляции. ИРИ с сигналами типа N0N (несущая) данным способом не могут быть измерены.
В настоящее время сохраняется большой парк РЭС гражданского и военного назначения, использующих узкополосные сигналы, сигналы с полосой излучения, соизмеримой с полосой информационного (моделирующего) сигнала.
К таким видам узкополосных сигналов относят телеграфию - 10...100 Гц, однополосную модуляцию - 3 кГц, телетайп - 4,8 кГц, низкоскоростной Интернет - 12,5 кГц и т.д.
Технический результат предлагаемого изобретения заключается в обеспечении определения местоположения ИРИ с сигналами типа N0N (несущая) и повышении точности определения местоположения ИРИ, излучающих узкополосные сигналы, при одновременном расширении класса ИРИ.
Технический результат достигается тем, что в известном способе определения местоположения ИРИ, включающем измерения пеленга на ИРИ и определение дальности до ИРИ, дополнительно измеряют на одной высоте амплитуды напряженности электромагнитного поля (ЭМП) ИРИ Е1, Е2 в двух разнесенных соответственно точках на расстояние b по линии пеленга на ИРИ и определяют дальность до ИРИ в соответствии с формулой
Принцип предлагаемого способа основан на том, что скорость убывания амплитуды напряженности ЭМП ИРИ-Е по линии пеленга соответствует конкретному удалению до ИРИ-г и не зависит от энергопотенциала ИРИ-Э.
Из теории скалярного поля известно, что скорость изменения амплитуды напряженности ЭМП описывается его градиентом gradE, вектор которого показывает направление наискорейшего роста, а модуль  - скорость роста (убывания). На фигуре 1 показано, что модуль градиента амплитуды напряженности ЭМП соответствует конкретным удалениям r и r+b, его величина не зависит от энергопотенциала ИРИ Э>Э', а убывание амплитуды происходит в противоположную сторону от ИРИ по линии пеленга. Для различных условий распространения радиоволн существует определенная аналитическая зависимость Е(r), поэтому способ может быть применен к конкретным условиям распространения радиоволн.
- скорость роста (убывания). На фигуре 1 показано, что модуль градиента амплитуды напряженности ЭМП соответствует конкретным удалениям r и r+b, его величина не зависит от энергопотенциала ИРИ Э>Э', а убывание амплитуды происходит в противоположную сторону от ИРИ по линии пеленга. Для различных условий распространения радиоволн существует определенная аналитическая зависимость Е(r), поэтому способ может быть применен к конкретным условиям распространения радиоволн.
Предлагаемый способ рассматривается применительно практически важному случаю распространения земных УКВ радиоволн, когда высота поднятия передающей - h0 и приемных - h1, h2 антенн превышает длину волны - λ.
При условии  амплитуды напряженности ЭМП в двух разнесенных точках 1 и 2 на расстояние b определяется формулой Б.А.Введенского (М.П.Долуханов, «Распространение радиоволн», М., «Гос. издат.», 1960 г., стр.77)
амплитуды напряженности ЭМП в двух разнесенных точках 1 и 2 на расстояние b определяется формулой Б.А.Введенского (М.П.Долуханов, «Распространение радиоволн», М., «Гос. издат.», 1960 г., стр.77)


В предлагаемом способе скорость убывания амплитуды напряженности ЭМП ИРИ оценивают по отношению значений E1/E2, измеренных в разнесенных точках 1 и 2 соответственно на расстояние b по линии пеленга и на одной высоте h1=h2.
Тогда отношение выражений (3) и (4) принимает вид

Решив квадратное уравнение (5) относительно r, находим выражение (2) для определения дальности до ИРИ 
При этом измерение амплитуд напряженности ЭМП ИРИ в двух точках должно производиться одновременно путем формирования синхронной временной выборки.
В случае «выбросов» измерений, когда Е1≤Е2 за счет случайных флюктуаций, такие измерения отфильтровываются и в определении дальности не используются.
Проведенный эксперимент подтверждает вычисленную зависимость по формуле (2), результаты которого для b=100 м приведены в таблице.
Сопоставленный анализ заявленного решения с прототипом показывает, что предложенный способ отличается от известного количеством новых действий над сигналом ИРИ:
- одновременное измерение амплитуды напряженности электромагнитного поля ИРИ в двух точках, разнесенных по линии пеленга на расстояние b и на одной высоте;
- вычисление дальности до ИРИ в соответствии с выражением (2).
По совокупности действий над сигналом ИРИ предлагаемый способ является амплитудным. При изучении других известных технических решений в данной области техники указанная совокупность признаков, отличающая изобретение от прототипа, не была выявлена, что указывает на соответствие заявленного изобретения критерию охраноспособности «новизна».
Результаты поиска известных технических решений в данной и смежных областях техники с целью выявления признаков, совпадающих с отличительными признаками заявляемого способа, показали, что в общедоступных источниках информации не выявлены решения, имеющие признаки, совпадающие с его отличительными признаками. Из уровня техники также не подтверждена известность влияния отличительных признаков заявляемого изобретения на указанный заявителем технический результат. Следовательно, заявляемое изобретение соответствует условию «изобретательский уровень».
Предлагаемый способ определения местоположения источников радиоизлучений промышленно применим, так как совокупность характеризующих его признаков обеспечивает возможность его существования, работоспособности и воспроизводимости, а для реализации способа могут быть использованы известные материалы и оборудование.
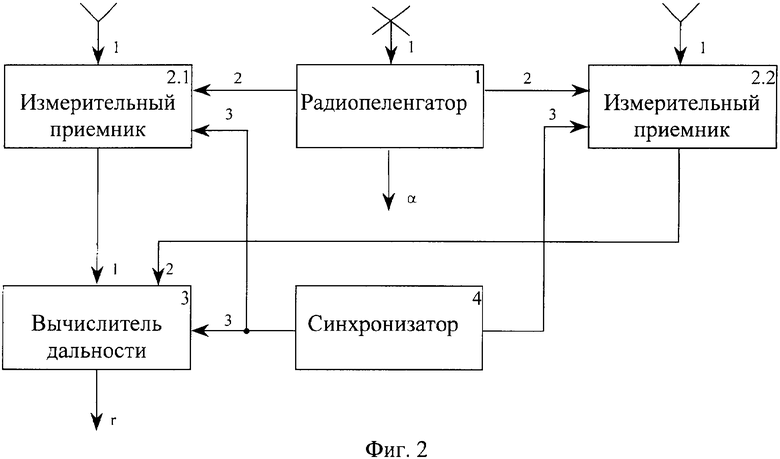
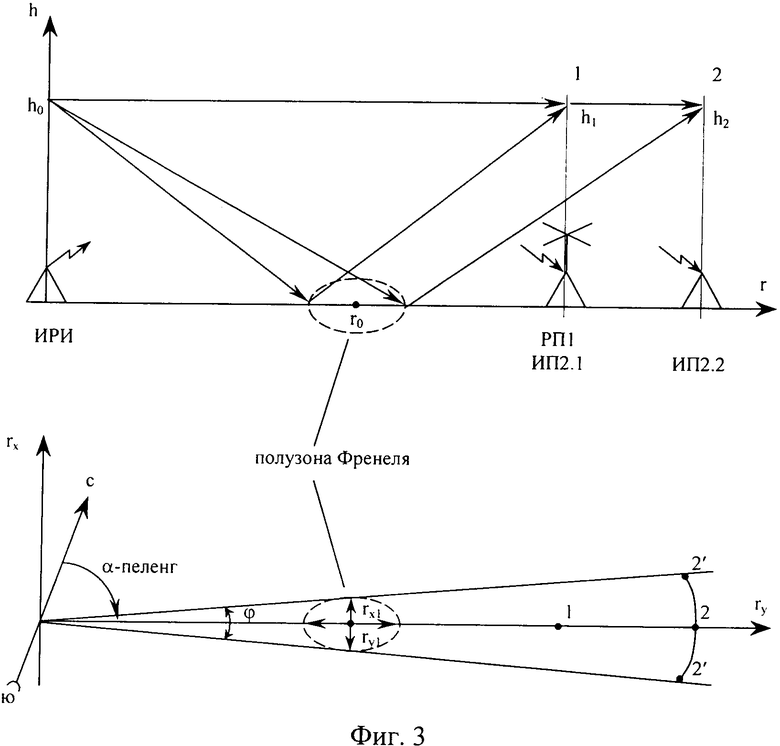
На фиг.1 приведена диаграмма изменения амплитуды напряженности электромагнитного поля ИРИ в зависимости от удаления до ИРИ, на фиг.2 - структурная схема системы, реализующей предложенный способ, на фиг.3 - взаимное размещение элементов (устройств) системы в угломерной и азимутальной плоскостях.
В таблице приведены значения E1/E2, вычислены для различных удалений от ИРИ, при b=100 м.
Система, реализующая предлагаемый способ (фиг.2), содержит радиопеленгатор (РП) 1, управляющие выходы (2 - код. частоты), которые подключены к управляющим входам (2) двух измерительных приемников (ИП) 2.1, 2.2, информационные выходы которых подключены к информационным входам вычислителя дальности 3, при этом синхронизатор времени выборки 4 подключен к управляющим входам (3) измерительных приемников 2.1, 2.2 и вычислителя дальности 3.
Измерительный приемник 2.1 размещается на одной позиции с радиопеленгатором 1, а измерительный приемник 2.2 вынесен на расстояние b в направлении увеличения расстояния до ИРИ (фиг.3).
Расстояние b между измерительными приемниками 2.1, 2.2 определяется из условия, при котором отраженные лучи от земной поверхности складывались с прямым лучом в точках измерения 1, 2, исходят из одной полузоны Френеля.
По линии пеленга на ИРИ расстояние между измерительными приемниками 2.1, 2.2 ограничивается размерами большой (продольной) полуосью зоны Френеля b≤rx1.
Допустимое отклонение измерительного приемника 2.2 от линии пеленга на ИРИ ограничивается углом ϕ, образованным ИРИ и малой (поперечной) полуосью - ry1 зоны Френеля.
Принцип функционирования системы состоит в следующем.
Радиопеленгатор 1 по управляющему входу/выходу (2) синхронно настраивает измерительные приемники 2.1, 2.2 на частоту сигнала ИРИ.
Синхронно принятые сигналы измерительными приемниками 2.1 и 2.2 имеют вид:
S1(t,E1)=E1·S0(t), S2(t,E2)=E1·S0(t), при Е1>Е2,
где E1, E2 - амплитуда напряженности ЭМП ИРИ, подлежащая измерению, и является неизвестным информационным параметром сигнала;
S0(t) - сомножитель, задающий форму сигнала в соответствии с видом модуляции и имеющий единичную энергию 
Энергия принимаемых сигналов определяется 

Показателем потенциальной точности измерения амплитуды ЭМП является дисперсия относительной ошибки измерения, равная

(«Радиотехнические системы», под ред. Ю.М.Казаринова, М., «Высшая школа», 1990 г., стр.123, 124).
Таким образом, информационный параметр определяет энергетику сигнала и не зависит от вида и параметра модуляции.
Для повышения точности измерения амплитуды ЭМП ИРИ необходимо увеличивать отношение энергий сигнал/шум на выходе линейной части измерительных приемников 2.1 и 2.2.
Принятые сигналы ИРИ приемниками 2.1 и 2.2 оцифровываются, период дискретизации сигнала dt≤ΔF/2, где ΔF - полоса пропускания линейного тракта измерительного приемника. Объем выборки определяется из условия необходимого усреднения результата измерения.
Синхронность цифровых выборок сигнала ИРИ приемниками 2.1 и 2.2 задается синхронизатором времени выборки 4.
Результаты измерения амплитуд напряженности поля сигнала ИРИ параллельно считываются в вычислитель дальности 3, где в соответствии с формулой (2) определяется дальность до ИРИ.
Анализ выражения (6) показывает, что потенциальная точность измерения информационного параметра о дальности до ИРИ не зависит от класса сигнала (вида и параметров модуляции), что имеет преимущество по сравнению с прототипом.
Следовательно, точность определения местоположения ИРИ не зависит от класса и ширины спектра сигнала.
Таблица
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2008 |
|
RU2380723C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ В БЛИЖНЕЙ ЗОНЕ | 2006 |
|
RU2308735C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАКЛОННОЙ ДАЛЬНОСТИ ДО ДВИЖУЩЕЙСЯ ЦЕЛИ ПАССИВНЫМ МОНОСТАТИЧЕСКИМ ПЕЛЕНГАТОРОМ | 2014 |
|
RU2557808C1 |
| ФАЗОВЫЙ ПЕЛЕНГАТОР | 2012 |
|
RU2519593C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ДО ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ С НАПРАВЛЕННОЙ АНТЕННОЙ | 2010 |
|
RU2444749C1 |
| ФАЗОВЫЙ СПОСОБ ПЕЛЕНГАЦИИ И ФАЗОВЫЙ ПЕЛЕНГАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2450283C1 |
| ОДНОПОЗИЦИОННЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ | 2016 |
|
RU2666520C2 |
| СПОСОБ ПОЛЯРИЗАЦИОННОГО ПЕЛЕНГОВАНИЯ РАДИОСИГНАЛОВ | 2016 |
|
RU2624449C1 |
| Способ одноэтапного адаптивного определения координат источников радиоизлучений | 2021 |
|
RU2768011C1 |
| Способ амплитудно-фазовой пеленгации системой с вращающимися антаннами | 2020 |
|
RU2750335C1 |
Изобретение относится к пассивной радиолокации и предназначено для определения местоположения источников радиоизлучения (ИРИ) в радиоразведке. Достигаемым техническим результатом является повышение точности определения местоположения ИРИ при одновременном расширении класса ИРИ. Технический результат достигается за счет того, что в известном способе определения местоположения ИРИ, включающем измерения пеленга на ИРИ и определение дальности до ИРИ, дополнительно измеряют на одной высоте амплитуды напряженности электромагнитного поля (ЭМП) ИРИ E1, E2 в двух разнесенных соответственно точках на расстояние b по линии пеленга на ИРИ и определяют дальность до ИРИ в соответствии с формулой
При этом измерение амплитуд напряженности ЭМП ИРИ в двух точках должно производиться одновременно путем формирования синхронной временной выборки. В случае «выбросов» измерений, когда E1≤Е2 за счет случайных флюктуаций, такие измерения отфильтровываются и в определении дальности не используются. 3 ил., 1 табл.
Способ определения местоположения источника радиоизлучения, включающий измерение пеленга на источник радиоизлучения и определение дальности до источника радиоизлучения, отличающийся тем, что дополнительно измеряют одновременно на одной высоте амплитуды напряженности электромагнитного поля источника радиоизлучения E1, Е2 в двух разнесенных соответственно точках на расстояние b по линии пеленга и определяют дальность до источника радиоизлучения в соответствии с формулой
при этом, когда Е1≤Е2, то такие измерения отфильтровывают и в определении дальности не используют.
| Теоретические основы радиолокации | |||
| / Под ред | |||
| Я.Д.ШИРМАНА - М.: Сов | |||
| радио, 1970, с.497-511 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2005 |
|
RU2292560C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ДВИЖУЩЕГОСЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ С НЕИЗВЕСТНЫМИ ПАРАМЕТРАМИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2234712C2 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2004 |
|
RU2263328C1 |
| Кран машиниста | 1940 |
|
SU69205A1 |
| US 2004259566 A1, 23.12.2004. | |||

