Область техники
Изобретение относится к датчикам механических колебаний, в частности к датчикам вибраций или датчикам ускорений.
Уровень техники
Известен датчик механических колебаний, патентная заявка Японии JP 57139664, опубликованная 29.08.1982, включающий корпус с несколькими пьезокерамическими пластинами внутри, установленными консольно на стенках корпуса с возможностью подключения к внешнему устройству обработки электрических сигналов, образуемых при изгибах пьезокерамических пластин.
Этот известный датчик не обеспечивает выявление и измерение вращательных механических колебаний и линейных механических колебаний в произвольном направлении относительно него.
Раскрытие изобретения
Технический результат, достигаемый в заявленном датчике механических колебаний, заключается в способности одновременного выявления и обеспечения измерения линейных колебаний (ускорений) в произвольном относительно датчика направлении и вращательных механических колебаний (угловых ускорений) в пространстве относительно произвольной (любой) оси (датчика).
Указанный технический результат достигается в датчике механических колебаний, включающем корпус с несколькими пьезокерамическими пластинами внутри, установленными консольно на стенках корпуса с возможностью подключения к внешнему устройству обработки электрических сигналов, образуемых при изгибах пьезокерамических пластин, при этом три пары пьезокерамических пластин расположены во взаимно перпендикулярных плоскостях, пластины каждой из пар (находящиеся в одной плоскости) установлены консольно с противоположных сторон (на противоположных стенках корпуса) симметрично относительно плоскостей расположения других пар.
Симметричная установка пары пьезокерамических пластин в одной плоскости позволяет из сравнения электрических сигналов разделять сигналы, вызванные линейным ускорением, в направлении, перпендикулярном плоскости расположения этой пары, и сигналы, вызванные угловым ускорением при вращательном движении датчика (относительно оси, перпендикулярной продольной плоскости симметрии этой пары). А симметрия каждой из трех пар пьезокерамических пластин относительно двух перпендикулярных им плоскостей расположения других двух пар обеспечивает определение векторов линейного ускорения и углового ускорения, благодаря независимости сигналов каждой пары пластин от сигналов других пар пластин.
Пьезокерамические пластины целесообразно подбирать (выполнять) с одинаковыми размерами (параметрами) и располагать на одинаковом расстоянии друг от друга. Это позволит обеспечить одинаковость сигналов от каждой пары пластин при одинаковом воздействии.
Установка пьезокерамических пластин внутри корпуса позволяет предохранить пьезокерамические пластины от внешних воздействий и обеспечивает беспрепятственную установку датчика на изделии, механические колебания (вибрации) которого необходимо выявить или измерить.
Пьезокерамические пластины могут быть выполнены биморфными.
Пьезокерамические пластины могут быть установлены в пазах стенок корпуса, выполненного в виде полого металлического куба.
Краткое описание чертежей
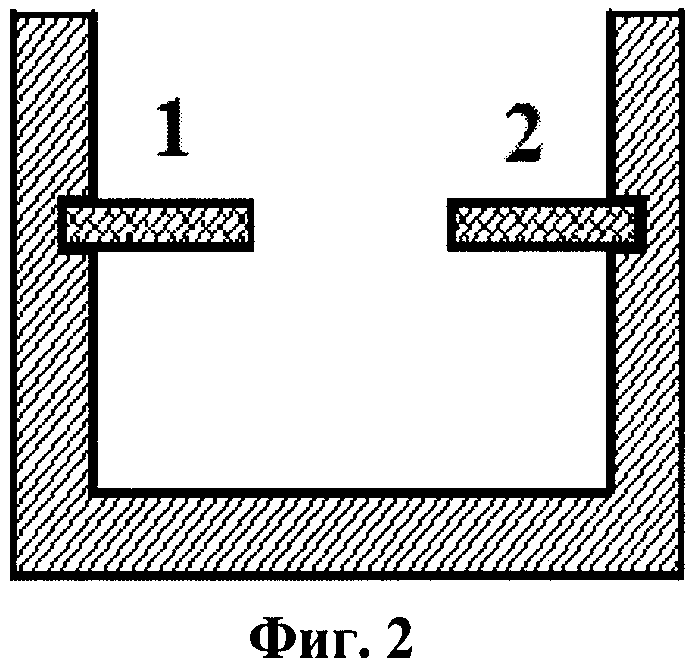
На фиг.1 представлена схема расположения трех пар пьезокерамических пластин в корпусе.
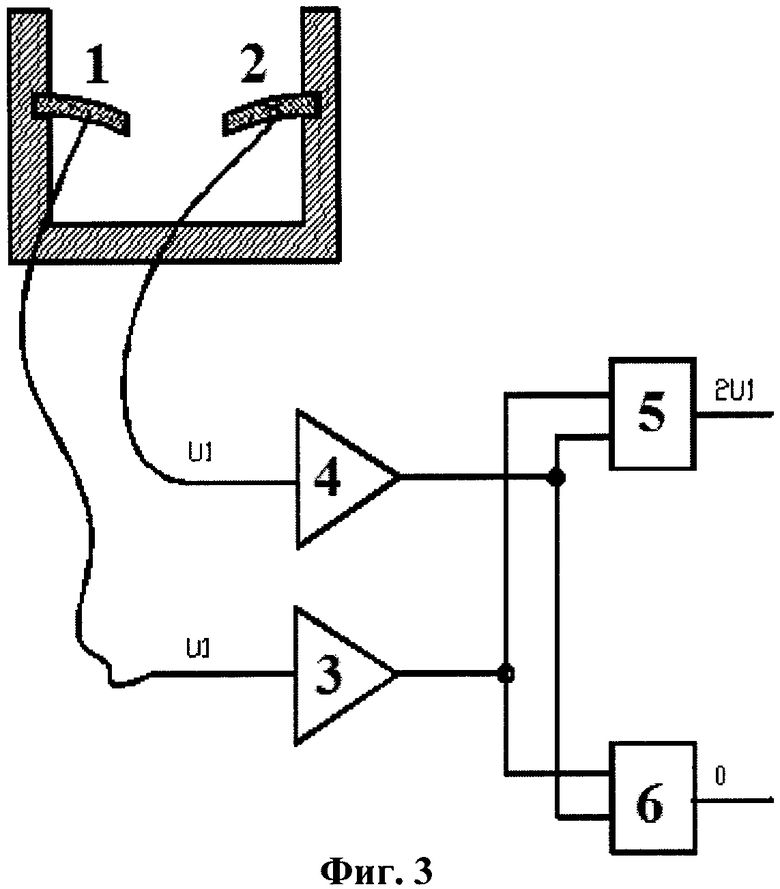
На фиг.2 представлена схема установки одной из пар пьезокерамических пластин в корпусе.
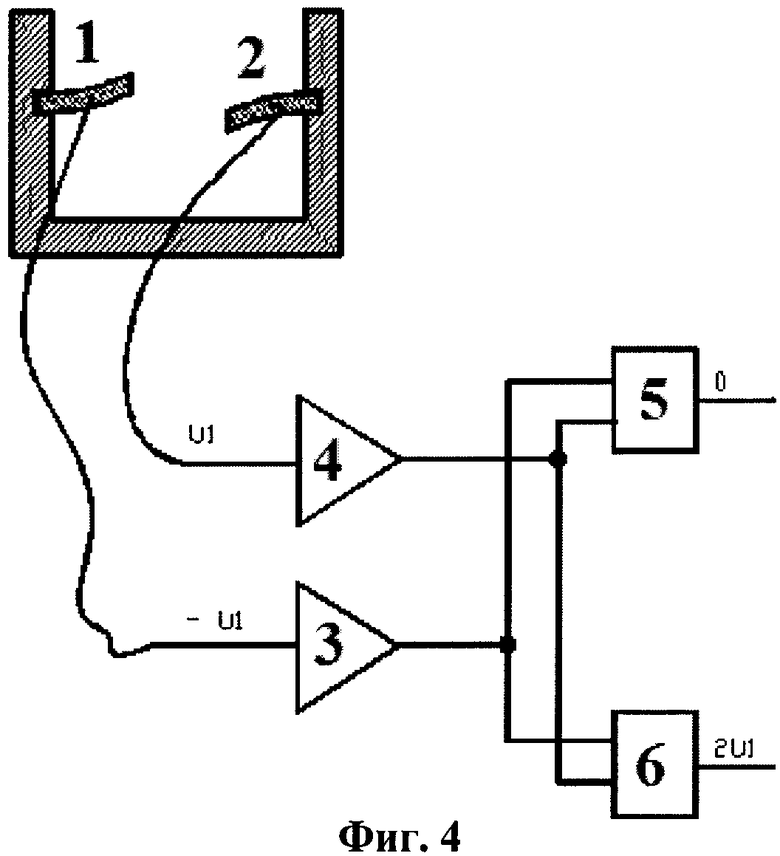
На фиг.3 и фиг.4 представлена схема устройства выявления линейного и/или углового ускорения с использованием одной из пар пьезокерамических пластин.
Осуществление изобретения
Принцип действия существующих пьезоэлектрических датчиков основан на измерении проекции вектора линейного ускорения на измерительную ось датчика. Однако важно знать, во-первых, значения вектора линейного ускорения, а во-вторых, значения вектора углового ускорения изгибных колебаний. Простейшим примером влияния изгибных колебаний является быстрое разрушение проволоки при периодическом изгибе.
Согласно изобретению предлагается 6D-датчик механических колебаний, который позволяет одновременно измерять в малой области, практически в точке, шесть компонент параметров волнового механического поля - три линейных и три вращательных ускорения. Знание шести компонент вибрационного поля в двух соседних точках позволяет получить точное значение напряженно-деформированного состояния в материале, подвергающемся динамическому воздействию.
Датчик представляет собой полое тело в форме куба (фиг.1), в каждую грань которого вмонтирован наружным ребром чувствительный элемент - обычная или биморфная пьезокерамическая пластина.
В плоскости XY закреплены пластины 1 и 2, в плоскостях XZ и YZ - другие две пары пластин. Поляризация противоположных пьезопластин каждой пары совпадает по направлению. Корпус приемника жестко крепится на вибрирующую поверхность объекта.
Датчик по всем трем координатам работает идентично, поэтому рассмотрим его работу в направлении одной из осей. На фиг.2 приведено расположение чувствительных элементов - пластин 1 и 2, используемых для измерения линейных вибраций в направлении оси Z.
Датчик работает следующим образом. При воздействии на датчик поступательных колебаний вдоль оси Z, пьезопластины 1 и 2 начинают изгибаться за счет инерции собственной массы в одну сторону, противоположную направлению ускорения корпуса датчика. Изгиб пьезопластин, показанный на фиг.3, вызывает появление электрических сигналов одинаковой полярности на электродах пьезопластин. Одинаковополярные сигналы +Dпост1 и +Dпост2, пропорциональные поступательному ускорению датчика, после усиления предварительными усилителями 3 и 4 подаются на сумматор 5. В этом случае, при линейной вибрации датчика вдоль оси Z, сигналы на сумматоре будет синхронно складываться, а измерение, при равенстве чувствительностей пластин, составит величину +2Dпост.
При воздействии углового ускорения вокруг оси Y пластины 1 и 2 будут изгибаться в противоположных относительно оси Z направлениях. Как следует из фиг.4, изгибные колебания вызывают на пластинах образование равных сигналов противоположного знака. Разнополярные сигналы -Dвращ1 и +Dвращ2, пропорциональные вращательному движению датчика, после усиления предварительными усилителями 3 и 4 подаются одновременно на сумматор 5 и устройство вычитания сигналов 6, при этом получаем следующий результат при равенстве сигналов от пластин 1 и 2: сигнал на выходе сумматора будет равен нулю, а сигнал на выходе устройства вычитания удвоится. В этом случае, при крутильных колебаниях датчика вокруг оси Y разнополярные сигналы пластин 1 и 2 будут синхронно вычитаться, и измерение составит величину ±2Dвращ.
Таким образом, при одновременном поступательном и вращательном колебательных движениях датчика на выходе сумматора измеряется сигнал, пропорциональный поступательному движению датчика в направлении оси Z, а на выходе устройства вычитания измеряется сигнал, пропорциональный вращательному движению датчика вдоль оси Y.
По двум другим осям Y и X приемника работа происходит аналогично, что отражено в таблице.
Материал корпуса датчика механических колебаний - нержавеющая сталь или титан, либо другой прочный, не подверженный низкочастотному резонансу материал, например стеклокерамика. Для шестикомпонентного датчика шесть стенок корпуса со смонтированными на них пластинами могут быть скреплены механически (винтовая фиксация клеевого соединения для низкочастотных датчиков, либо сварка для высокочастотных датчиков). Корпус может быть собран также из трех уголков или двух П-образных стенок, что увеличивает жесткость конструкции, но усложняет монтаж пластин.
Консольная конструкция крепления пластин осуществляется путем установки пластины в щель (прорезь в стенке) корпуса с фиксацией с помощью термореактивных полимеров или механических резьбовых прижимов. Для упрощения процедуры юстировки положения пластин в плоскостях, строго пересекающихся в центре куба, можно предварительно монтировать пластину в изолирующую оправку, которую, в свою очередь, можно более удобно крепить к стенке корпуса. Для подбора резонансной частоты и чувствительности датчика на пьезокерамических пластинах возможно крепление грузов.
Все пьезокерамические пластины выполнены с одинаковыми размерами и одинаково закреплены. Каждая пара пластин сонаправленно поляризована.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРЕХКОМПОНЕНТНЫЙ ДАТЧИК МЕХАНИЧЕСКИХ КОЛЕБАНИЙ | 2008 |
|
RU2383025C1 |
| СПОСОБ И 3D-ПРИЕМНИК ИЗМЕРЕНИЯ ВЕКТОРА МЕХАНИЧЕСКИХ КОЛЕБАНИЙ | 2010 |
|
RU2530479C2 |
| УНИВЕРСАЛЬНЫЙ ВИБРОДАТЧИК ЛИНЕЙНОГО И УГЛОВОГО УСКОРЕНИЯ | 1996 |
|
RU2104558C1 |
| СПОСОБ МОНИТОРИНГА МАШИН И СООРУЖЕНИЙ | 2008 |
|
RU2371691C1 |
| Трехкомпонентный датчик для сейсмического моделирования | 1984 |
|
SU1190325A1 |
| ВЕКТОРНЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ВИБРОПРЕОБРАЗОВАТЕЛЬ | 2007 |
|
RU2347228C1 |
| ПРОЦЕСС СОЗДАНИЯ НАНОВИБРАЦИОННОГО ПОКРЫТИЯ ДЛЯ МЕДИЦИНСКИХ УСТРОЙСТВ С ИСПОЛЬЗОВАНИЕМ НЕСКОЛЬКИХ ВИДОВ КОЛЕБАНИЙ ТОНКОГО ПЬЕЗОЭЛЕМЕНТА | 2005 |
|
RU2419395C2 |
| ПОЗИЦИОНИРУЮЩЕЕ УСТРОЙСТВО | 1994 |
|
RU2080631C1 |
| МАЛОГАБАРИТНЫЙ ДАТЧИК УДАРА | 2016 |
|
RU2621467C1 |
| БЛОК ПРЕОБРАЗОВАТЕЛЕЙ ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ | 2011 |
|
RU2458321C1 |
Изобретение относится к датчикам механических колебаний, в частности к датчикам вибраций или датчикам ускорений. Техническим результатом изобретения является обеспечение одновременного измерения линейных колебаний в произвольном относительно датчика направлении и вращательных механических колебаний в пространстве относительно произвольной оси. Датчик механических колебаний включает корпус с несколькими пьезокерамическими пластинами внутри, установленными консольно на стенках корпуса. Три пары пьезокерамических пластин расположены во взаимно перпендикулярных плоскостях, при этом пластины каждой из пар установлены консольно с противоположных сторон симметрично относительно плоскостей расположения других пар. 3 з.п. ф-лы, 4 ил., 1 табл.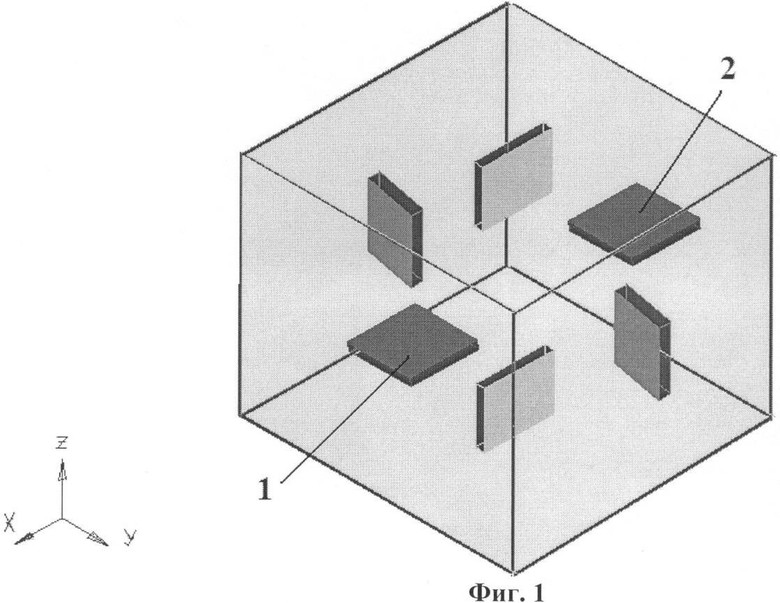
1. Датчик механических колебаний, включающий корпус с несколькими пьезокерамическими пластинами внутри, установленными консольно на стенках корпуса, отличающийся тем, что три пары пьезокерамических пластин расположены во взаимно перпендикулярных плоскостях, при этом пластины каждой из пар установлены консольно с противоположных сторон симметрично относительно плоскостей расположения других пар.
2. Датчик по п.1, отличающийся тем, что пьезокерамические пластины биморфные.
3. Датчик по п.1, отличающийся тем, что все пьезокерамические пластины выполнены с одинаковыми размерами и установлены на одинаковом расстоянии друг от друга.
4. Датчик по п.1, отличающийся тем, что пьезокерамические пластины установлены в пазах стенок корпуса, выполненного в виде полого металлического куба.
| Многокомпонентный пьезоэлектрический тендем-вибродатчик | 1990 |
|
SU1792537A3 |
| Шестикомпонентный сейсмометр | 1979 |
|
SU853578A1 |
| ВОСПРИНИМАЮЩЕЕ УСТРОЙСТВО ДЛЯ ТРЕХМЕРНОГО ИЗМЕРЕНИЯ ПОЛОЖЕНИЯ ИЛИ УСКОРЕНИЯ | 1997 |
|
RU2202803C2 |
| МАШИНА ДЛЯ ДРОБЛЕНИЯ РУДЫ | 1929 |
|
SU17990A1 |
| JP 2008076076 А, 03.04.2008 | |||
| DE 19960481 А1, 21.06.2001. | |||

