Изобретение относится к области диагностики технического состояния технологического оборудования, в частности мостовых кранов радиального действия, устанавливаемых в реакторных отделениях атомных электростанций с реактором ВВР-1000, для восстановления их эксплуатационной пригодности в процессе ремонта.
Известно техническое решение способа диагностики геометрических параметров ходовой части мостовых кранов, заключающееся в том, что осуществляют остановку крана, выполняют измерения положения колес ходовой части и вычисляют их взаимное положение (Контроль геометрических параметров мостовых кранов во время эксплуатации.//Межвуз. Сб. Новосиб. ин-т инж. геод., аэрофотосъемки и картогр. 1984, 22/62, с.111-115). Описанное техническое решение не обеспечивает получение объективной информации о геометрических параметрах ходовой части мостовых кранов.
Наиболее близким к заявляемому является способ диагностики геометрических параметров ходовой части мостовых кранов, заключающийся в том, что осуществляют остановку крана, также установку на подкрановых путях геодезических средств измерений, выполнение их ориентирования, формирование, таким образом, базисных направлений, выполнение измерений положения колес ходовой части относительно сформированных базисных направлений и вычисление положения ходовых колес (Г.А.Шеховцов. Современные методы геодезического контроля ходовой части и путей мостовых кранов: Монография. - Н.Новгород: Нижегород. Гос. Арх.-строит. Ун-т, 1999 г., с.99-105).
Описанное техническое решение не обеспечивает получение объективной информации о геометрических параметрах ходовой части мостовых кранов радиального действия. В силу того что при изготовлении конструкций кранов радиального действия неизбежно допускаются отклонения от формальных теоретических значений, например, в хордах, или сверхнормативные развороты (перекосы) колес, или наличие негативного сочетания допустимых разворотов (перекосов), в этом случае разность между формально теоретическими и практическими значениями геометрических параметров ходовой части крана не дает достоверных характеристик для разработки рекомендаций на ремонт крана.
Задачей заявляемого изобретения является исследование мостовых кранов радиального действия с повышением достоверности информации о геометрических параметрах их ходовой части.
Сущность изобретения заключается в том, что в способе диагностики геометрических параметров ходовой части мостовых кранов радиального действия, включающем остановку крана, также установку в районе балансиров геодезических средств измерений, выполнение их ориентирования, формирование, таким образом, базисных направлений, выполнение измерений положения колес ходовой части относительно сформированных базисных направлений и вычисление положения ходовых колес, первоначально выполняют обмеры ходовой части крана, в том числе малой и большой хорд между главными балансирами, то есть между колесами смежных балансиров, находящихся на одной стороне крана и заключенных между ближайшими ходовыми колесами балансиров и крайними колесами, а также хорд главных балансиров, и выполняют исследование геометрических параметров ходовой части крана, для этого при остановке крана выполняют определение положения оси симметрии ходовых колес относительно его центра вращения и, кроме того, контролируют взаимное расположение главных балансиров, балансиров и ходовых колес относительно базисных направлений, сформированных геодезическими средствами измерений установленных на площадках обслуживания балансиров, при обработке результатов измерений определяют оптимальный внутренний радиус ходовой части крана, затем определяют расчетный радиус, далее, используя величины расчетного радиуса и хорд, определяют фактические теоретические геометрические характеристики ходовой части крана, для этого вычисляют уклонения от стягивающей хорды, проведенной через две диаметрально противоположные крайние исследуемые точки, расположенные на ходовых колесах смежных балансиров, до контролируемых точек расположенных на краях всех ходовых колес данных смежных балансиров, затем определяют практические геометрические параметры уклонений от стягивающей хорды, проведенной через две диаметрально противоположные крайние исследуемые точки, расположенные на ходовых колесах смежных балансиров, до контролируемых точек расположенных на краях всех ходовых колес данных смежных балансиров, по разности фактических и практических геометрических параметров положения ходовых колес крана определяют перекосы и их радиальные биения, затем разрабатывают рекомендации на восстановление нормативных характеристик ходовой части крана при условии, что все окружности, на которых установлены ходовые колеса, концентрические.
Предлагаемое техническое решение способа диагностики геометрических параметров ходовой части мостовых кранов радиального действия реализует теорему, заключающуюся в том, что для восстановления штатных характеристик ходовой части крана радиального действия реализуется условие, когда все окружности, на которых установлены ходовые колеса, концентрические. В процессе ремонта устраняются дефекты геометрии крана исключительно рихтовкой (разворотом) колес ходовой части крана, или реализуются компенсирующие мероприятия с восстановлением геометрических условий, обеспечивающих штатные условия работы крана. Известные ранее технические решения реализуют условия, при которых определяются частные геометрические параметры кранов, которые характеризует его оригинальное состояние и непригодны для разработки предложений на ремонт.
Изобретение поясняется чертежами, где:
фиг.1 - схема расположения ходовых колес в смежных балансирах;
фиг.2 - схема расположения радиусов ходовой части крана;
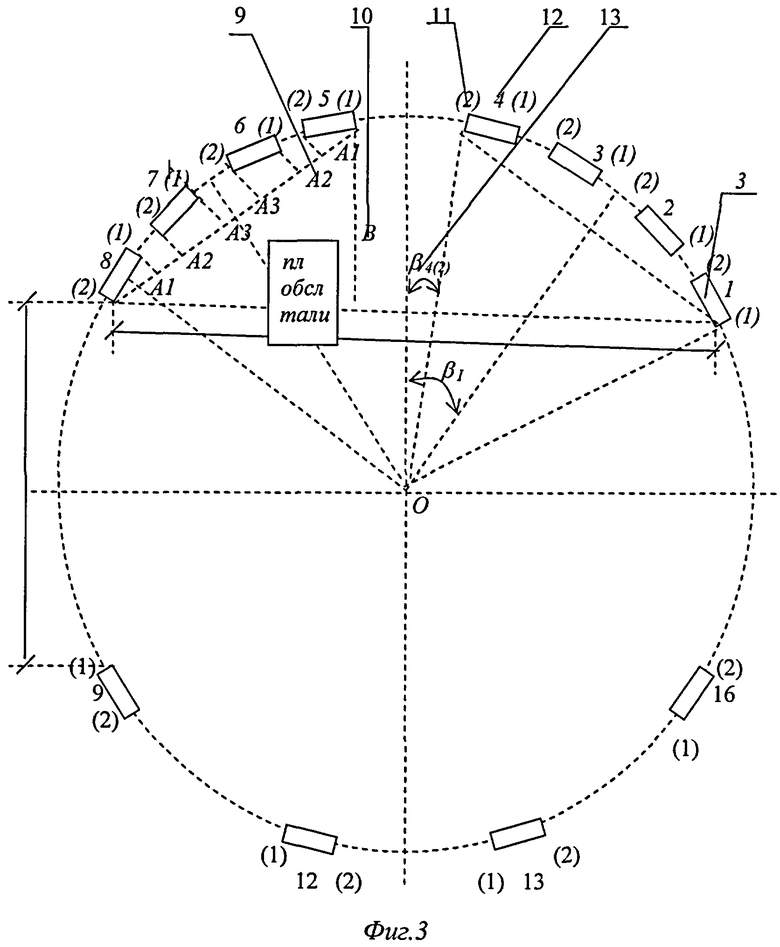
фиг.3 - геометрические параметры ходовой части крана.
Способ диагностики геометрических параметров ходовой части мостовых кранов радиального действия состоит в следующем. Первоначально осуществляют установку на площадках обслуживания балансиров геодезических средств измерений, например теодолитов ЗТ5КП, и выполняют их ориентирования примерно параллельно хордам балансиров 2 или 5, формируют, таким образом, базисные направления. Затем выполняют обмеры ходовой части крана, в том числе малой 1 и большой 2 хорд между главными балансирами, то есть между колесами 3 смежных балансиров, находящихся на одной стороне крана и заключенных между ближайшими ходовыми колесами 3 балансиров и крайними колесами 3, а также хорд 4, 5 главных балансиров, см. фиг.1. Далее выполняют исследование геометрических параметров ходовой части крана, для этого при остановке крана выполняют определение положения оси симметрии 5 ходовых колес относительно его центра вращения с помощью электронного тахеометра (например, Elta-S6), см. фиг.1. Кроме того, контролируют взаимное расположение главных балансиров, балансиров и ходовых колес относительно базисных направлений, сформированных геодезическими средствами измерений, теодолитами 3Т5КП установленных на площадках обслуживания балансиров, при обработке результатов измерений определяют оптимальный внутренний радиус 7 (Rвнутренний) ходовой части крана, затем определяют расчетный радиус 8 (Rрасчетный), см.фиг.2.
(Rрасчетный)2=(Rвнутренний)2+(D/2)2,
где D - диаметр ходовых колес.
Далее, используя величины расчетного радиуса 8 и хорд 1, 2, 4, 5, определяют фактические теоретические геометрические характеристики ходовой части крана. Для этого вычисляют уклонения 9, 10 от стягивающих хорд 2 и 5, проведенных через две диаметрально противоположные крайние исследуемые точки, расположенные на ходовых колесах 3 смежных балансиров, до контролируемых точек 11, расположенных на краях всех ходовых колес 3 данных смежных балансиров, см. фиг.3. При этом ходовые колеса 3 нумеруются 12 последовательно, например против хода часовой стрелки. Здесь первоначально вычисляют все центральные углы βi(j) 13, заключенные между осью симметрии смежных балансиров и направлением на крайние точки 11 ходовых колес 3. Затем вычисляют линейные параметры Вi(j) 10 (см. фиг.3). Для колес с номерами (1-4) 12 (первого балансира)
Вi(j)=(Rрасчетный)(сos(βi(j))-cos(β1(1))).
Для колес с номерами (5-8) 12 (второго балансира)
Bi(j)=(Rрасчетный)(cos(βi(j))-cos(β8(2))).
Для колес с номерами (9-12) 12 (третьего балансира)
Bi(j)=(Rрасчетный)(cos(βi(j))-cos(β9(1))).
Для колес с номерами (13-16) 12 (четвертого балансира)
Bi(j)=(Rрасчетный)(cos(βi(j))-cos(β]6(2))).
Затем вычисляют углы между осями симметрии главных балансиров и направлением на крайние точки колес, принадлежащих данному главному балансиру. Например, для первого балансира, для колес с номерами 1-4. Здесь для колес с номерами 1-2 центральные углы вычисляются
β=i(j) (1)=βi(j)-βI;
для колес 3-4, вычисляются
βi(j) (1)=βI-βi(j);
затем вычисляют линейные параметры Аi(j) -9 (см. фиг.3).
Для колес с номерами 1-2
Аi(j)=(Rрасчетный)((cos(β1(1) (I))-(cos(βi(j) (I)))).
Для колес с номерами 3-4
Аi(j)=(Rрасчетный)((cos(β4(2) (I))-cos(βi(j)) (I)))).
Для всех остальных балансиров вычисления осуществляются аналогично. Таким образом вычисляются фактические геометрические параметры ходовой части кранов. Затем определяют практические геометрические параметры Bi(j) (пр), Аi(j) (пр) уклонений от стягивающей хорды, проведенной через две диаметрально противоположные крайние исследуемые точки, расположенные на ходовых колесах смежных балансиров, до контролируемых точек, расположенных на краях всех ходовых колес данных смежных балансиров. По разности фактических и практических геометрических параметров положения ходовых колес крана определяют перекосы и их радиальные биения, на основе которых разрабатывают рекомендации на восстановление нормативных характеристик ходовой части крана при условии, что все окружности, на которых установлены ходовые колеса, концентрические.
В процессе ремонта устраняются дефекты геометрии крана исключительно рихтовкой (разворотом колес) ходовой части крана, или реализуются компенсирующие мероприятия с восстановлением геометрических условий, обеспечивающих штатные условия работы крана. Известные ранее технические решения реализуют условия, при которых геометрические характеристики сравниваются с теоретическими, без учета фактических геометрических параметров, таким образом, эти параметры не отражают реальных параметров и непригодны для разработки предложений на ремонт.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ДИАГНОСТИКИ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ХОДОВОЙ ЧАСТИ МОСТОВОГО КРАНА КРУГОВОГО ДЕЙСТВИЯ | 2010 |
|
RU2425348C1 |
| СПОСОБ ДИАГНОСТИКИ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ХОДОВОЙ ЧАСТИ МОСТОВЫХ КРАНОВ | 2008 |
|
RU2382347C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДЕФОРМАЦИОННЫХ ХАРАКТЕРИСТИК СООРУЖЕНИЙ | 2010 |
|
RU2426089C1 |
| СПОСОБ ГЕОМЕТРИЧЕСКОГО НИВЕЛИРОВАНИЯ | 2002 |
|
RU2213325C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДЕФОРМАЦИОННЫХ ХАРАКТЕРИСТИК ЗАЩИТНОЙ ГЕРМЕТИЧНОЙ ОБОЛОЧКИ | 2013 |
|
RU2546990C1 |
| СПОСОБ ОЦЕНКИ ЭКСПЛУАТАЦИОННОЙ НАДЕЖНОСТИ ЗАЩИТНОЙ ГЕРМЕТИЧНОЙ ОБОЛОЧКИ РЕАКТОРНОГО ОТДЕЛЕНИЯ АЭС | 2014 |
|
RU2577555C9 |
| Способ коллинеарного переноса оси референтного направления | 1989 |
|
SU1703973A1 |
| СПОСОБ НЕПРЕРЫВНОГО ПОДЪЕМА И ВЫРАВНИВАНИЯ ЗДАНИЙ | 2010 |
|
RU2420631C1 |
| СИСТЕМА ПОДЪЕМА И ВЫРАВНИВАНИЯ ЗДАНИЙ | 2010 |
|
RU2425926C1 |
| СПОСОБ НЕПРЕРЫВНОГО ПОДЪЕМА И ВЫРАВНИВАНИЯ ЗДАНИЙ | 2003 |
|
RU2230164C1 |


Изобретение относится к области диагностики технического состояния технологического оборудования, в частности мостовых кранов радиального действия, для восстановления их эксплуатационной пригодности в процессе ремонта. Способ диагностики включает остановку крана, установку в районе балансиров геодезических средств измерений, выполнение их ориентирования, формирование базисных направлений, выполнение измерений положения колес ходовой части относительно сформированных базисных направлений и вычисление положения ходовых колес. Первоначально выполняют обмеры ходовой части крана, в том числе малой и большой хорд между главными балансирами, а также хорд главных балансиров и выполняют исследование геометрических параметров ходовой части крана. При остановке крана выполняют определение положения оси симметрии ходовых колес относительно его центра вращения и контролируют взаимное расположение главных балансиров, балансиров и ходовых колес относительно базисных направлений, сформированных геодезическими средствами измерений. При обработке результатов измерений определяют оптимальный внутренний радиус ходовой части крана, затем определяют расчетный радиус, далее, используя величины расчетного радиуса и хорд, определяют фактические теоретические геометрические характеристики ходовой части крана. По разности фактических и практических геометрических параметров положения ходовых колес крана определяют перекосы и их радиальные биения. Достигается эффективное исследование мостовых кранов радиального действия. 3 ил.
Способ диагностики геометрических параметров ходовой части мостовых кранов радиального действия, включающий остановку крана, также установку в районе балансиров геодезических средств измерений, выполнение их ориентирования, формирование таким образом базисных направлений и выполнение измерений положения колес ходовой части относительно сформированных базисных направлений, и вычисление положения ходовых колес, отличающийся тем, что первоначально выполняют обмеры ходовой части крана, в том числе малой и большой хорд между главными балансирами, то есть между колесами смежных балансиров, находящихся на одной стороне крана и заключенных между ближайшими ходовыми колесами балансиров и крайними колесами, а также хорд главных балансиров и выполняют исследование геометрических параметров ходовой части крана, для этого при остановке крана выполняют определение положения оси симметрии ходовых колес относительно его центра вращения и, кроме того, контролируют взаимное расположение главных балансиров, балансиров и ходовых колес относительно базисных направлений, сформированных геодезическими средствами измерений, установленных на площадках обслуживания балансиров, при обработке результатов измерений определяют оптимальный внутренний радиус ходовой части крана, затем определяют расчетный радиус, далее используя величины расчетного радиуса и хорд определяют фактические теоретические геометрические характеристики ходовой части крана, для этого вычисляют уклонения от стягивающей хорды, проведенной через две диаметрально противоположные крайние исследуемые точки, расположенные на ходовых колесах смежных балансиров, до контролируемых точек расположенных на краях всех ходовых колес данных смежных балансиров, затем определяют практические геометрические параметры уклонений от стягивающей хорды, проведенной через две диаметрально противоположные крайние исследуемые точки, расположенные на ходовых колесах смежных балансиров, до контролируемых точек расположенных на краях всех ходовых колес данных смежных балансиров, по разности фактических и практических геометрических параметров положения ходовых колес крана определяют перекосы и их радиальные биения, затем разрабатывают рекомендации на восстановление нормативных характеристик ходовой части крана при условии, что все окружности, на которых установлены ходовые колеса, концентрические.
| Способ контроля геометрии ходовой части транспортного средства и устройство для его осуществления | 1989 |
|
SU1691704A1 |
| СПОСОБ УПРАВЛЕНИЯ ГРУЗОПОДЪЕМНЫМ КРАНОМ И УСТРОЙСТВО ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2003 |
|
RU2245837C1 |
| US 2002066390 A1, 06.06.2002 | |||
| КАБЕЛЬНЫЙ ВВОД | 2002 |
|
RU2194348C1 |

