Изобретение относится к области диагностики технического состояния технологического оборудования, в частности мостовых кранов кругового действия, устанавливаемых в реакторных отделениях атомных электростанций с реактором ВВР-1000, для восстановления их эксплуатационной пригодности в процессе ремонта.
Известно техническое решение - способ диагностики геометрических параметров ходовой части мостовых кранов, заключающийся в том, что осуществляют остановку крана, также установку на подкрановых путях геодезических средств измерений, выполнение их ориентирования, формирование, таким образом, базисных направлений и выполнение измерений положения колес ходовой части относительно сформированных базисных направлений и вычисление положения ходовых (Контроль геометрических параметров мостовых кранов во время эксплуатации // Межвуз. Сб. Новосиб. ин-т инж. геод., аэрофотосъемки и картогр., 1984, 22/62, с.111-115). Описанное техническое решение не обеспечивает получение объективной информации о геометрических параметрах ходовой части мостовых кранов прямолинейного действия и тем более кранов радиального действия. В силу того что при наличии сверхнормативных разворотов (перекосов) колес, допущенных при монтаже, или наличии негативного сочетания допустимых разворотов (перекосов) в процессе движения крана, его ходовая часть и рама крана претерпевают непрерывные изменения геометрических параметров. Остановка крана, контроль расположения его колес, в данном положении, характеризуют лишь уникальные геометрические параметры и не описывают ремонтопригодную геометрию.
Наиболее близким к заявляемому является способ диагностики геометрических параметров ходовой части мостовых кранов кругового действия (Г.А.Шеховцов. Современные методы геодезического контроля ходовой части и путей мостовых кранов: Монография. - Н.Новгород: Нижегород. Гос. Арх.-строит. Ун-т, 1999 г., 99-105 с.), включающий остановку крана, также установку в районе балансиров геодезических средств измерений, выполнение их ориентирования, формирование, таким образом, базисных направлений и выполнение измерений положения колес ходовой части относительно сформированных базисных направлений и вычисление положения ходовых колес, при этом первоначально определяют предельные состояния крана, для этого геодезическим средством измерений, установленным в зоне балансиров, контролируют изменение геометрических параметров взаимного расположения балансиров и ходовых колес при прокатывании крана в одном из направлений вдоль пути, остановку крана осуществляют в момент фиксации максимальных величин перемещений балансиров и ходовых колес относительно базисных направлений, зафиксировав предельное состояние, начинают движение в обратном направлении до регистрации противоположного критического состояния, зафиксировав два названных положения, выполняют исследование геометрических параметров конструктивных элементов крана в пределах данного интервала L с остановкой крана через интервалы ΔL=L/n, при каждой остановке крана выполняют определение положения ходовых колес относительно его центра вращения и кроме того контролируют взаимное расположение главных балансиров, балансиров и ходовых колес относительно базисных направлений, сформированных геодезическими средствами измерений в районе балансиров, при обработке результатов измерений вначале для каждой остановки крана вычисляют положение ходовых колес относительно центра вращения крана, то есть радиусы, на которых установлены ходовые колеса, после этого для каждой остановки крана вычисляют уклонения от стягивающей хорды, проведенной через две диаметрально противоположные крайние исследуемые точки, расположенные на ходовых колесах смежных балансиров, до контролируемых точек, расположенных на краях всех ходовых колес данных смежных балансиров, по этим результатам определяют перекосы и радиальные биения ходовых колес крана, в качестве итоговых результатов, характеризующих ремонтопригодную геометрию крана, принимают среднее значение из всех полученных, далее на основе вычисленных средних параметров и величин радиусов, на которых установлены ходовые колеса, разрабатывают рекомендации на восстановление нормативных характеристик ходовой части крана при условии, что все окружности, на которых установлены ходовые колеса, концентрические.
Описанное техническое решение не обеспечивает оперативного получения объективной информации о геометрических параметрах ходовой части мостовых кранов кругового действия. В силу того что при каждой остановке крана выполняют определение положения ходовых колес относительно его центра вращения и кроме того контролируют взаимное расположение главных балансиров, балансиров и ходовых колес относительно базисных направлений, сформированных геодезическими средствами измерений, устанавливаемыми в районе балансиров, это сопряжено с большим объемом трудозатрат, связанным с измерительными работами по контролю радиальности и прямолинейности.
Задачей заявляемого изобретения является повышение точности и оперативности получения информации о геометрических параметрах их ходовой части при исследовании мостовых кранов кругового действия.
Сущность изобретения заключается в том, что способ диагностики геометрических параметров ходовой части мостового крана кругового действия, включающий определение предельных состояний крана, путем установки геодезических средств измерений в зоне балансиров и задания ими базисных направлений, и контроля изменения геометрических параметров взаимного расположения балансиров и ходовых колес при прокатывании крана в одном из направлений вдоль пути, остановку крана осуществляют в момент фиксации максимальных величин перемещений балансиров и ходовых колес относительно базисных направлений, зафиксировав предельное состояние, начинают движение в обратном направлении до регистрации противоположного критического состояния, зафиксировав два названных положения, выполняют исследование геометрических параметров конструктивных элементов крана в пределах данного интервала L с остановкой крана через интервалы ΔL=L/n, при каждой остановке крана выполняют определение положения ходовых колес относительно его центра вращения, согласно изобретению первоначально формируют систему базовых точек, относительно которых определяют координаты станции стояния геодезического прибора, затем при каждой остановке крана последовательно на каждое колесо устанавливают центроискатель, имеющий отражающие элементы, ось симметрии которых совпадает соответственно с крайними точками данного колеса и с его осью симметрии, выполняют последовательное координирование каждого отражающего элемента, при обработке результатов измерений вначале определяют координаты оптимального центра крана, по координатам отражающих элементов, установленных на центроискателе, ось симметрии которых совпадает с осью симметрии контролируемого колеса, затем вычисляют внутренние радиусы, на которых установлены ходовые колеса, по данным величинам определяют радиальные смещения колес, затем определяют расстояния от оптимального центра до крайних точек колес, по данным величинам вычисляют развороты колес.
Предлагаемое техническое решение способа диагностики геометрических параметров ходовой части мостовых кранов кругового действия реализуется путем выполнения измерений лишь координат точек, характеризующих положение каждого ходового колеса, в частности крайних точек, находящихся на горизонтальном диаметре, и точки, совпадающей с осью симметрии данного колеса, это существенно снижает объем выполняемых измерительных работ, что обеспечивает повышение оперативности получения информации о геометрических параметрах ходовой части крана. Выполнение равноточных измерений однородных величин обеспечивает повышение точности получения искомой информации.
Изобретение поясняется чертежами, где даны:
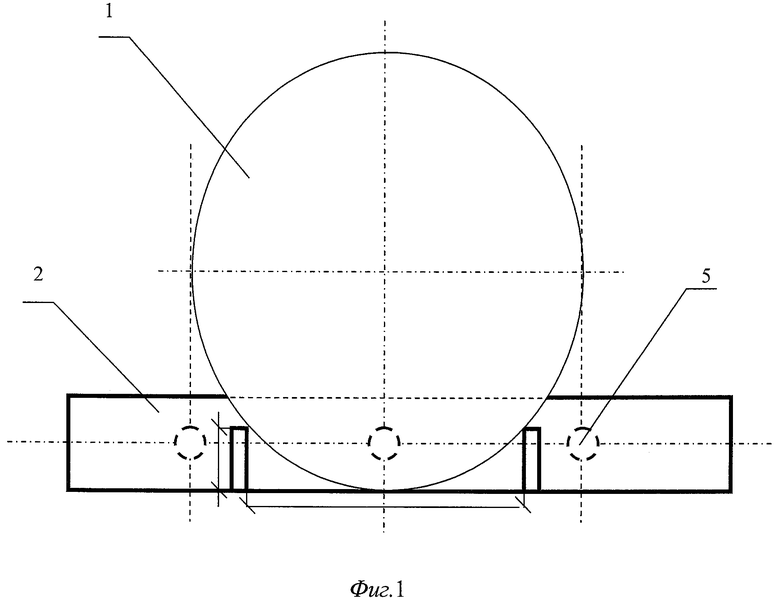
Фиг.1 - схема установки центроискателя на колесо крана.
Фиг.2 - схема центроискателя, вид сверху.
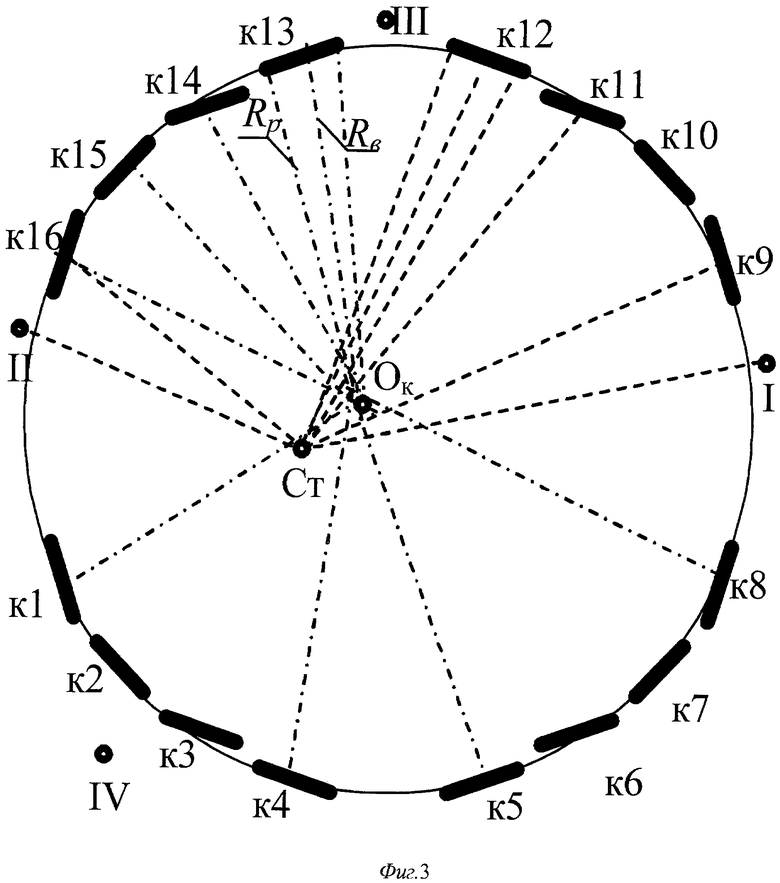
Фиг.3 - схема ходовой части крана кругового действия.
Способ диагностики геометрических параметров ходовой части мостового крана состоит в следующем: первоначально формируют систему базовых точек, например I-II-III-IV, располагая их примерно равномерно по окружности и маркируя их на внутренней поверхности стальной диафрагмы защитной оболочки реакторного отделения. Выполняют их координирование, например электронным тахеометром Elta S-10. Затем определяют предельные состояния крана. Зафиксировав названные положения, выполняют исследование геометрии в пределах данного интервала L с остановкой крана через некоторые интервалы ΔL=L/n. Например n=3. При каждой остановке крана последовательно на каждое колесо 1 устанавливают центроискатель 2, имеющий отражающие элементы 3, 4, 5, ось симметрии которых совпадает соответственно с крайними точками данного колеса 1, находящимися на горизонтальном диаметре, и с его осью симметрии, выполняют последовательное координирование каждого отражающего элемента 3, 4, 5, например электронным тахеометром Elta S-10, установленным в реакторном отделении. Причем координаты прибора определяются по системе ранее сформированных базовых точек, I-II-III-IV, путем решения, например, обратной линейно угловой геодезической засечки. В случае, если с одной станции выполнить координирование исследуемых точек всех ходовых колес невозможно, прибор устанавливают несколько раз в наиболее удобных местах для координирования. Полученные результаты измерения выполнены в единой системе координат, которая задается системой сформированных базовых точек, I-II-III-IV. При обработке результатов измерений вначале определяют координаты оптимального центра крана, по координатам отражающих элементов 4, установленных на центроискателе 2, ось симметрии которых совпадает с осью симметрии контролируемого колеса 1, затем вычисляют внутренние радиусы Rв, на которых установлены ходовые колеса, по данным параметрам вычисляют радиальные смещения колес
ΔR=Rв-(ΣR/n),
где ΣR - сумма внутренних радиусов;
n - общее количество внутренних радиусов.
Затем определяют расстояния от оптимального центра до крайних точек колес Rp, по данным величинам вычисляют развороты колес.
δR=Rp(1)-((Rp(1)+Rp(2)/2) и δR=Rp(2)-((Rp(1)+Rp(2))/2),
где - Rp(1), Rp(2) - расстояния от оптимального центра до крайних точек колес.
Далее на основе вычисленных средних параметров разрабатывают рекомендации на восстановление нормативных характеристик ходовой части крана.
Предлагаемое техническое решение способа диагностики геометрических параметров ходовой части мостовых кранов кругового действия реализуется путем выполнения измерений лишь координат точек, характеризующих положение каждого ходового колеса, в частности крайних точек, находящихся на горизонтальном диаметре, и точки, совпадающей с осью симметрии данного колеса, это существенно снижает объем выполняемых измерительных работ, что обеспечивает повышение оперативности получения информации о геометрических параметрах ходовой части крана. Выполнение равноточных измерений однородных величин обеспечивает повышение точности получения искомой информации.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ДИАГНОСТИКИ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ХОДОВОЙ ЧАСТИ МОСТОВЫХ КРАНОВ РАДИАЛЬНОГО ДЕЙСТВИЯ | 2008 |
|
RU2384831C1 |
| СПОСОБ ДИАГНОСТИКИ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ХОДОВОЙ ЧАСТИ МОСТОВЫХ КРАНОВ | 2008 |
|
RU2382347C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДЕФОРМАЦИОННЫХ ХАРАКТЕРИСТИК СООРУЖЕНИЙ | 2010 |
|
RU2426089C1 |
| СПОСОБ ОЦЕНКИ ЭКСПЛУАТАЦИОННОЙ НАДЕЖНОСТИ ЗАЩИТНОЙ ГЕРМЕТИЧНОЙ ОБОЛОЧКИ РЕАКТОРНОГО ОТДЕЛЕНИЯ АЭС | 2014 |
|
RU2577555C9 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДЕФОРМАЦИОННЫХ ХАРАКТЕРИСТИК ЗАЩИТНОЙ ГЕРМЕТИЧНОЙ ОБОЛОЧКИ | 2013 |
|
RU2546990C1 |
| СПОСОБ НЕПРЕРЫВНОГО ПОДЪЕМА И ВЫРАВНИВАНИЯ ЗДАНИЙ | 2010 |
|
RU2420631C1 |
| СПОСОБ НЕПРЕРЫВНОГО ПОДЪЕМА И ВЫРАВНИВАНИЯ ЗДАНИЙ | 2003 |
|
RU2230164C1 |
| СПОСОБ ГЕОМЕТРИЧЕСКОГО НИВЕЛИРОВАНИЯ | 2002 |
|
RU2213325C1 |
| СИСТЕМА ПОДЪЕМА И ВЫРАВНИВАНИЯ ЗДАНИЙ | 2010 |
|
RU2425926C1 |
| Способ определения пространственных координат и геометрических параметров рельсового пути и устройство для его осуществления | 2016 |
|
RU2628541C1 |

Сущность изобретения: при осуществлении диагностики первоначально формируют систему базовых точек и выполняют их координирование. Затем определяют предельные состояния крана. Зафиксировав названные положения, выполняют исследование геометрии в определенном интервале с остановками крана. При каждой остановке крана последовательно на каждое колесо устанавливают центроискатель, имеющий отражающие элементы, ось симметрии которых совпадает соответственно с крайними точками данного колеса, находящимися на горизонтальном диаметре, и с его осью симметрии, выполняют последовательное координирование каждого отражающего элемента. При обработке результатов измерений определяют координаты оптимального центра крана по координатам отражающих элементов, установленных на центроискателе, ось симметрии которых совпадает с осью симметрии контролируемого колеса, и вычисляют внутренние радиусы, на которых установлены ходовые колеса, и радиальные смещения колес, определяют расстояния от оптимального центра до крайних точек колес и вычисляют развороты колес. На основе вычисленных средних параметров разрабатывают рекомендации на восстановление нормативных характеристик ходовой части крана. Повышаются точность и оперативность получения информации о геометрических параметрах их ходовой части при исследовании мостовых кранов кругового действия. 3 ил.
Способ диагностики геометрических параметров ходовой части мостового крана кругового действия, включающий определение предельных состояний крана путем установки геодезических средств измерений в зоне балансиров и задания ими базисных направлений и контроля изменения геометрических параметров взаимного расположения балансиров и ходовых колес при прокатывании крана в одном из направлений вдоль пути, остановку крана осуществляют в момент фиксации максимальных величин перемещений балансиров и ходовых колес относительно базисных направлений, зафиксировав предельное состояние, начинают движение в обратном направлении до регистрации противоположного критического состояния, зафиксировав два названных положения, выполняют исследование геометрических параметров конструктивных элементов крана в пределах данного интервала L с остановкой крана через интервалы ΔL=L/n, при каждой остановке крана выполняют определение положения ходовых колес относительно его центра вращения, отличающийся тем, что первоначально формируют систему базовых точек, относительно которых определяют координаты станции стояния геодезического прибора, затем при каждой остановке крана последовательно на каждое колесо устанавливают центроискатель, имеющий отражающие элементы, ось симметрии которых совпадает соответственно с крайними точками данного колеса и с его осью симметрии, выполняют последовательное координирование каждого отражающего элемента, при обработке результатов измерений вначале определяют координаты оптимального центра крана, по координатам отражающих элементов, установленных на центроискателе, ось симметрии которых совпадает с осью симметрии контролируемого колеса, затем вычисляют внутренние радиусы, на которых установлены ходовые колеса, по данным величинам определяют радиальные смещения колес, затем определяют расстояния от оптимального центра до крайних точек колес, по данным величинам вычисляют развороты колес.
| Способ контроля геометрии ходовой части транспортного средства и устройство для его осуществления | 1989 |
|
SU1691704A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПОЛОЖЕНИЯ ХОДОВЫХ КОЛЕС ПОДЪЕМНО-ТРАНСПОРТНОГО СРЕДСТВА | 2002 |
|
RU2235679C2 |
| СИСТЕМА И СПОСОБ ДЛЯ УЛЬТРАЗВУКОВОГО ИЗМЕРЕНИЯ С ИСПОЛЬЗОВАНИЕМ ФИТИНГА ДИАФРАГМЕННОГО РАСХОДОМЕРА | 2013 |
|
RU2598976C1 |
| US 2002066390 A1, 06.06.2002 | |||
| УСТРОЙСТВО для ОПРЕДЕЛЕНИЯ ВЕРОЯТНОСТИ НАСТУПЛЕНИЯ СОБЫТИЯ | 0 |
|
SU205374A1 |

