Область техники, к которой относится изобретение
Настоящее изобретение относится к улучшению маневренных характеристик летательного аппарата в процессе осуществления заключительной фазы захода на посадку перед приземлением и последующего выравнивания при помощи соответствующего управления не являющимися несущими отклоняемыми щитками, называемыми также воздушными тормозами.
Предшествующий уровень техники
Под выражением "улучшение маневренных характеристик летательного аппарата" следует понимать все то, что облегчает управление летательным аппаратом.
Подавляющее большинство заходов на посадку перед приземлением для коммерческих транспортных самолетов осуществляется по классической траектории снижения, обычно имеющей угол γ наклона, составляющий около -3°.
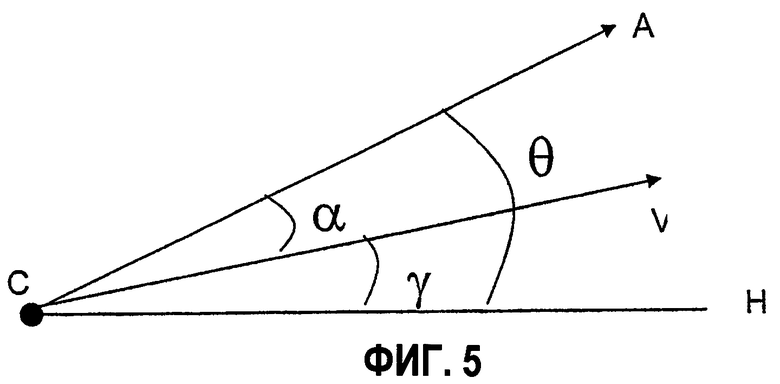
Угол γ наклона (фиг.5) траектории соответствует углу между вектором скорости V центра С тяжести летательного аппарата и горизонтом Н. Угол Θ тангажа представляет собой угол между продольной осью А самолета и горизонтом Н, и угол α атаки представляет собой угол между продольной осью А самолета и вектором скорости V. Соотношение, связывающее между собой эти различные углы, выглядит следующим образом: Θ = α + γ.
В общем случае аэродинамическая конфигурация летательного аппарата может быть изменена, в частности, при помощи выпуска воздушных тормозов, закрылков и предкрылков.
На заключительной фазе захода на посадку перед приземлением по, так называемой, классической глиссаде с углом наклона траектории снижения порядка γ = -3° аэродинамическая конфигурация летательного аппарата обычно соответствует положению, в котором воздушные тормоза убраны, закрылки выпущены и предкрылки также выпущены. Такая аэродинамическая конфигурация, связанная с заданной скоростью захода на посадку, заставляет летательный аппарат лететь с определенным углом атаки и, следовательно, с определенным углом тангажа. Поскольку подавляющее большинство заходов на посадку для приземления осуществляется по классической траектории снижения с углом наклона γ = -3°, у пилотов вырабатывается привычка всякий раз осуществлять посадку одним и тем же образом, с углом атаки и углом тангажа, по существу одинаковыми при каждой посадке. Поскольку в фазе осуществления посадки пилот не имеет возможности переключать свое внимание для оценки показаний индикаторов угла наклона траектории и угла атаки, он отчасти оценивает поведение летательного аппарата в функции угла тангажа, визуально оценивая угловое положение летательного аппарата относительно наземных ориентиров.
Развитие некоторых аэропортов, располагающихся в городских зонах, а также усилия, связанные со снижением уровня шума, создаваемого летательными аппаратами, привели к появлению новых специфических процедур захода на посадку. Эти специфические процедуры захода на посадку заставляют использовать углы наклона траектории снижения при заходе на посадку, все в большей степени превышающие (по абсолютной величине) классический угол наклона траектории снижения, равный -3°. Обычно специфические углы наклона траектории снижения при заходе на посадку, называемые также крутыми глиссадами, имеют величину менее -4,5°.
Чтобы иметь возможность выдерживать требуемый угол наклона траектории снижения, сохраняя при этом постоянной скорость движения летательного аппарата на заключительном этапе захода на посадку перед приземлением, должно быть обеспечено специфическое равновесие между лобовым сопротивлением и тягой двигателей. Подавляющее большинство самолетов, эксплуатируемых в таком режиме захода на посадку, оборудованы тяговыми воздушными винтами. Этот тип силовой установки позволяет, благодаря ориентации лопастей винтов, обеспечить отношение подъемной силы к лобовому сопротивлению, необходимое для того, чтобы следовать по траектории снижения с заданным углом наклона.
Для самолетов, оборудованных турбореактивными двигателями, необходимо использовать другие аэродинамические приемы, чтобы обеспечить необходимое отношение подъемной силы к лобовому сопротивлению.
На некоторых самолетах используются не являющиеся несущими отклоняемые щитки (или воздушные тормоза). Воздушные тормоза образуют аэродинамические поверхности управления, обычно устанавливаемые на верхней поверхности крыльев, позади конструкционных крыльевых кессонов и перед закрылками, на которые опираются собственные задние кромки воздушных тормозов.
Под действием средств силового привода, например, гидравлических, электрических или механических подъемников, работой которых управляет пилот летательного аппарата, например, при помощи специальной рукоятки, воздушные тормоза могут занимать:
- либо убранное положение, в котором они размещены на верхней поверхности соответствующего крыла, обеспечивая аэродинамическую непрерывность верхней поверхности,
- либо то или иное из выпущенных положений, в которых они выступают по отношению к верхней поверхности соответствующего крыла, располагаясь наклонно по отношению к этой поверхности.
Таким образом, в убранном положении воздушные тормоза интегрируются в аэродинамический профиль верхних поверхностей крыльев. Для каждого из возможных выпущенных положений, каждое из которых связано с той или иной специфической функцией и определяется при помощи величины угла отклонения по отношению к соответствующей верхней поверхности крыла, воздушные тормоза вызывают уменьшение подъемной силы и увеличение лобового сопротивления, амплитуды которых зависят от упомянутого угла отклонения и от площади поверхности воздушных тормозов.
Воздушные тормоза могут быть использованы в различных целях, например:
- для снижения скорости движения летательного аппарата в процессе завершения фазы приземления и, в случае необходимости, в процессе прерванного взлета;
- для снижения скорости движения летательного аппарата в полете или увеличения угла наклона траектории снижения летательного аппарата;
- для прижатия летательного аппарата к земле для улучшения условий торможения в процессе завершения фазы приземления или в процессе прерванного взлета;
- при заходе на посадку с классическим углом наклона траектории снижения (-3°) для следящего управления (непрерывные колебания) отклонением воздушных тормозов на некоторую заданную величину (уход летательного аппарата по отношению к траектории снижения, высоте, вертикальной скорости) в функции отклонения между заданным значением и реальным положением этого летательного аппарата (см. патент документ US 3589648);
- для управления в полете углом крена летательного аппарата путем асимметричного воздействия на воздушные тормоза двух его крыльев;
- для создания момента рыскания путем асимметричного воздействия на воздушные тормоза двух крыльев, участвующего в противодействии последствиям отказа двигателя в процессе взлета;
- для содействия снижению момента сопряжения крыла с фюзеляжем при больших значениях коэффициента перегрузки (выполнение маневров, порывы ветра) путем модификации распределения подъемной силы вдоль крыльев.
Таким образом, функции, выполняемые воздушными тормозами, весьма многообразны.
Вследствие уменьшения отношения подъемной силы к лобовому сопротивлению отклонение воздушных тормозов позволяет также увеличить угол наклона траектории снижения при заданной скорости. Это обстоятельство уже используется в случае внезапной разгерметизации летательного аппарата, что обязывает пилота обеспечить снижение на высоту, где пассажиры могут без масок дышать окружающим воздухом.
Была необходимость использовать это свойство в случае захода на посадку с большими углами наклона траектории снижения или по крутым глиссадам. Таким образом, благодаря выпуску воздушных тормозов большие углы наклона траектории снижения или крутые глиссады, задаваемые в аэропортах, располагающихся в городских зонах, могут быть использованы летательными аппаратами.
Однако было установлено, что в момент начала выравнивания, когда пилот отклоняет ручку управления "на себя", чтобы выровнять летательный аппарат перед касанием взлетно-посадочной полосы, летательный аппарат в этой конфигурации оказывается менее маневренным. В этом случае летательный аппарат слишком медленно реагирует на управляющие воздействия пилота по сравнению со случаем, когда воздушные тормоза убраны. Это происходит вследствие того, что для выравнивания летательного аппарата и излома траектории снижения необходимо создать более значительный коэффициент перегрузки, и что время, предоставленное для этого действия, является более коротким, чем в случае классического захода на посадку. Для создания этого коэффициента перегрузки необходимо увеличить угол атаки и, следовательно, угол тангажа, на величину, более значительную, чем при классическом заходе на посадку. Для уменьшения угла наклона траектории снижения вплоть до величины, которая гарантирует достаточно мягкое касание, необходимо также осуществить изменение угла тангажа на величину, более значительную, чем при классическом заходе на посадку, поскольку исходный угол наклона траектории снижения является более значительным. Таким образом, действия для изменения угла тангажа в процессе выравнивания оказываются почти в два раза более значительными в процессе захода на посадку по крутой глиссаде, чем в процессе классического захода на посадку. И чем больше угол наклона траектории снижения, там более значительным должно быть изменение угла тангажа. Таким образом, внешние ориентиры отсчета для пилота полностью изменяются и пилотирование в этой фазе полета в таких специфических условиях становится менее естественным и требует от пилота некоторого этапа адаптации и повышенного внимания.
Предлагаемое изобретение устраняет эти недостатки.
Технической задачей настоящего изобретения является создание способа улучшения маневренных характеристик летательного аппарата в процессе заключительной фазы захода на посадку перед приземлением и последующего его выравнивания при условии, что летательный аппарат оборудован воздушными тормозами.
Согласно изобретению воздушные тормоза устанавливают в некоторое первое выпущенное положение в процессе фазы захода на посадку и, в функции некоторого параметра, являющегося репрезентативным для заданной высоты, и при заходе на посадку по крутой глиссаде, обеспечивают управление переводом воздушных тормозов в некоторое второе положение, более убранное, чем упомянутое первое положение.
В соответствии с другим аспектом предлагаемого изобретения способ улучшения маневренных характеристик летательного аппарата в процессе заключительной фазы захода на посадку перед приземлением и последующего его выравнивания, при условии, что летательный аппарат оборудован воздушными тормозами, характеризуется тем, что
используют средства привода воздушных тормозов и средства управления, обеспечивающие управление средствами привода воздушных тормозов,
устанавливают воздушные тормоза в первое выпущенное положение в процессе заключительной фазы захода на посадку перед приземлением,
в функции параметра, являющегося репрезентативным для заданной высоты, при заходе на посадку по крутой глиссаде автоматически управляют переводом воздушных тормозов во второе положение, более убранное, чем первое положение.
Уборка воздушных тормозов из первого положения во второе положение в соответствии с предлагаемым изобретением позволяет обеспечить выравнивание и сохранить при этом, по существу, тот же самый угол атаки, соответствующий, в случае захода на посадку по крутой глиссаде, выравниванию с обычными внешними ориентирами отсчета пилотирования в процессе фазы выравнивания.
На практике уборка воздушных тормозов из первого положения во второе положение осуществляется без реверса до тех пор, пока шасси находится под нагрузкой.
В соответствии с другим аспектом способа уборка воздушных тормозов из первого положения во второе положение является постепенной.
В соответствии с еще одним аспектом способа уборка воздушных тормозов осуществляется из первого полностью выпущенного положения вплоть до второго полностью убранного положения.
В качестве варианта реализации уборка воздушных тормозов осуществляется из первого, по меньшей мере, частично выпущенного положения вплоть до второго, по меньшей мере, частично убранного положения.
В соответствии с другим аспектом, когда летательный аппарат оборудован закрылками, способ дополнительно включает этап, на котором закрылки выпускают в первое выпущенное положение в процессе заключительной фазы захода на посадку перед приземлением, а затем, в функции параметра, являющегося репрезентативным для заданной высоты, и в случае захода на посадку по крутой глиссаде, управляют переводом закрылков во второе положение, более выпущенное, чем первое положение.
На практике выпуск закрылков из первого положения во второе положение осуществляется без реверса до тех пор, пока шасси находится под нагрузкой.
В соответствии с одним из вариантов реализации способа управление закрылками осуществляется автоматически.
На практике выпуск закрылков из первого положения во второе положение является постепенным.
Управление воздушными тормозами и управление закрылками, например, является сопряженным.
Объектом предлагаемого изобретения также является устройство улучшения маневренных характеристик летательного аппарата в процессе выполнения заключительной фазы захода на посадку перед приземлением и последующего выравнивания при условии, что летательный аппарат оборудован воздушными тормозами.
В соответствии с этим аспектом устройство содержит средство привода, предназначенное для установки воздушных тормозов в первое выпущенное положение в процессе осуществления фазы захода на посадку, и средство управления, предназначенное в функции параметра, являющегося репрезентативным для заданной высоты, и в случае захода на посадку по крутой глиссаде, для управления средством привода для перевода воздушных тормозов во второе положение, более убранное, чем первое положение.
В соответствии с вариантом реализации ручного типа средство управления выполнено в виде рукоятки ручного управления, а средство привода содержит вычислитель, обеспечивающий возможность управления уборкой воздушных тормозов в соответствии с командами, передаваемыми от рукоятки управления.
В соответствии с еще одним аспектом предлагаемого изобретения устройство содержит средство привода воздушных тормозов и средство управления, предназначенное для управления средством привода воздушных тормозов, причем средство управления обеспечивает возможность автоматической установки воздушных тормозов в первое выпущенное положение в фазе захода на посадку и, в функции некоторого параметра, являющегося репрезентативным для заданной высоты, а также в случае захода на посадку по крутой глиссаде, и способно автоматически управлять переводом воздушных тормозов во второе положение, более убранное, чем первое положение.
На практике средство управления представляет собой вычислитель, предназначенный для формирования команды управления при достижении некоторого порогового значения высоты, тогда как средство привода представляет собой вычислитель, предназначенный для управления уборкой воздушных тормозов в соответствии с командой, сформированной средством управления.
В качестве варианта реализации средство управления представляет собой вычислитель, предназначенный для формирования команды управления в функции высоты, тогда как средство привода представляет собой вычислитель для управления уборкой воздушных тормозов в соответствии с командой, сформированной средством управления.
Объектом предлагаемого изобретения также является летательный аппарат, снабженный воздушными тормозами и содержащий описанное выше устройство улучшения маневренных характеристик летательного аппарата в процессе заключительной фазы захода на посадку перед приземлением и последующего выравнивания.
Другие характеристики и преимущества предлагаемого изобретения будут лучше поняты из приведенного ниже подробного описания примеров его реализации, со ссылками на сопровождающие чертежи, на которых:
фиг.1 изображает общий схематический вид сверху тяжелого гражданского транспортного самолета в полете;
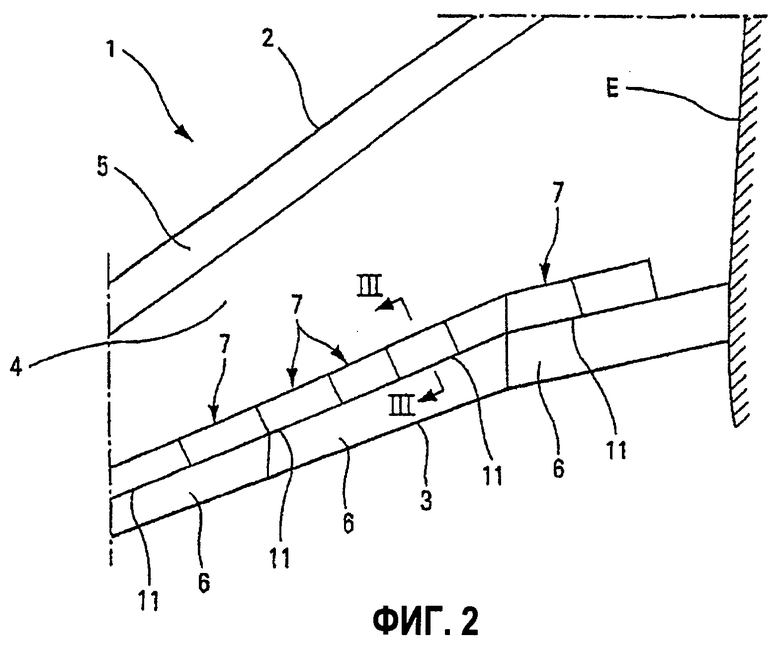
фиг.2 - схему крыла самолета с расположенными на крыле отклоняемыми не являющимися несущими щитками, предкрылками и закрылками в убранном положении согласно изобретению;
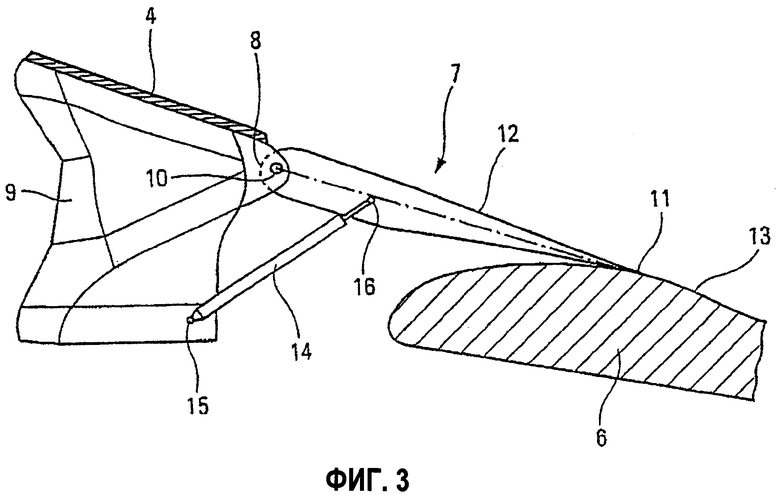
фиг.3 - разрез по линии III-III, на фиг.2, согласно изобретению;
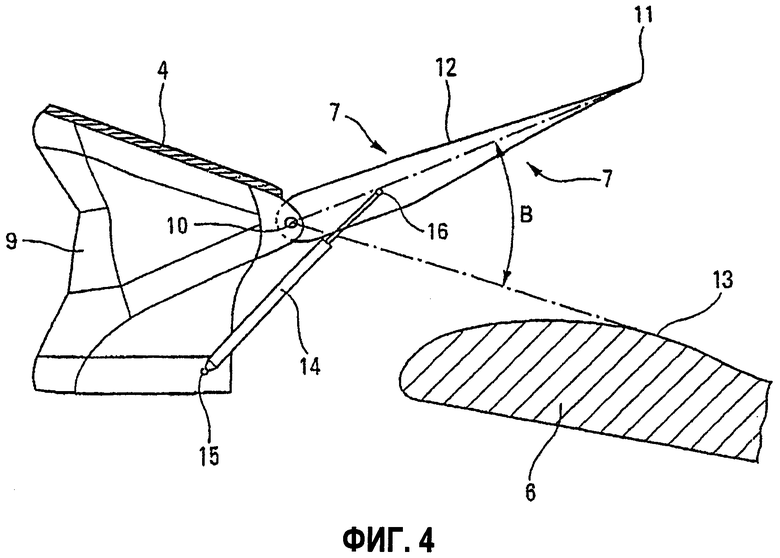
фиг.4 - то же, что на фиг.3, с не являющимся несущим отклоняемым щитком в выпущенном положении согласно изобретению;
фиг.5 - угол Θ тангажа, угол α атаки и угол γ наклона траектории движения летательного аппарата согласно изобретению;
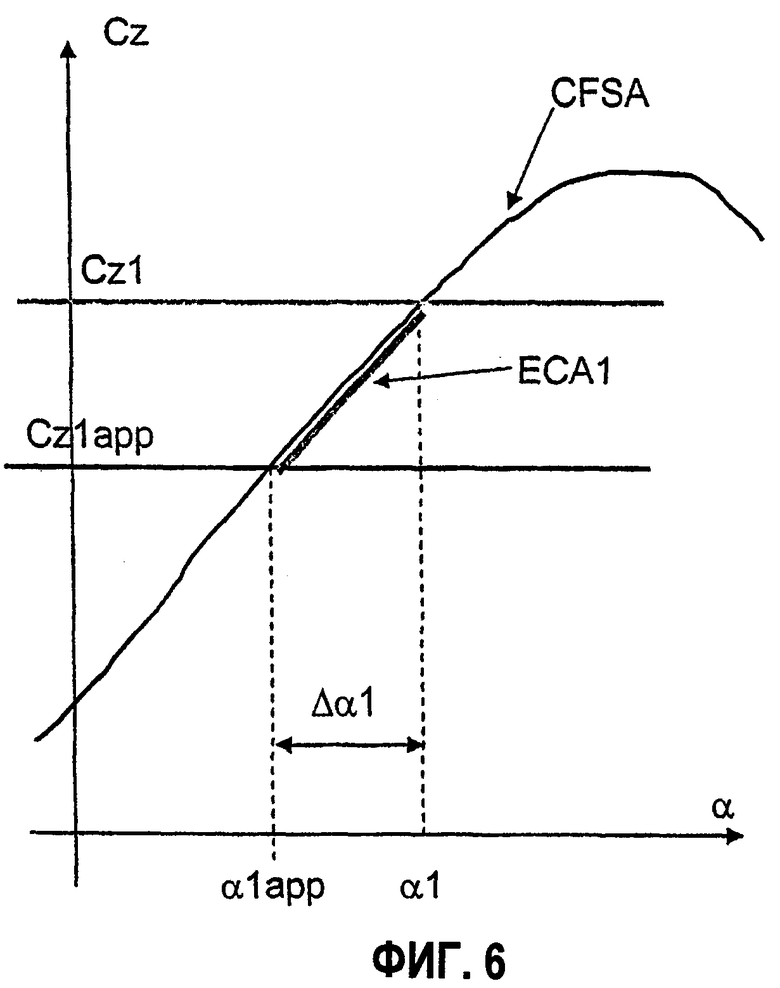
фиг.6 - диаграмму для конфигурации самолета при выполнении заключительной фазы захода на посадку перед приземлением, изменения коэффициента подъемной силы самолета в функции угла атаки, причем воздушные тормоза не выпущены на заключительной фазе захода на посадку перед приземлением, а также изменение коэффициента подъемной силы в процессе фазы выравнивания (показано жирной линией), выполняемой вслед за заходом на посадку по классической глиссаде (угол наклона траектории -3°), согласно изобретению;
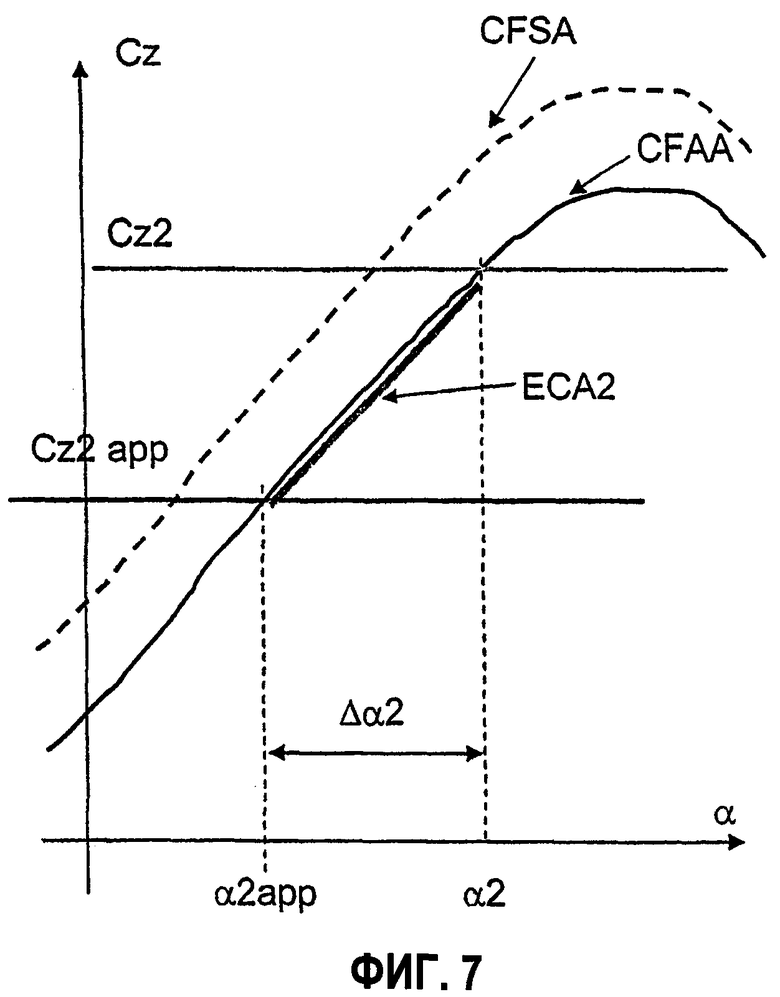
фиг.7 - диаграмму для конфигурации самолета при осуществлении заключительной фазы захода на посадку перед приземлением, изменения коэффициента подъемной силы самолета в функции его угла атаки, причем воздушные тормоза выпущены в процессе заключительной фазы захода на посадку перед приземлением. На этой диаграмме показано также изменение коэффициента подъемной силы в процессе фазы выравнивания (выделенное жирной линией), выполняемой вслед за заходом на посадку по крутой глиссаде (угол наклона траектории снижения -5,5°), согласно изобретению;
фиг.8 - диаграмму, иллюстрирующую (выделено жирной линией) для конфигурации самолета при осуществлении заключительной фазы захода на посадку перед приземлением по крутой глиссаде (угол наклона траектории -5°), изменения коэффициента подъемной силы самолета в функции его угла атаки в процессе фазы выравнивания, причем воздушные тормоза постепенно убираются из выпущенного положения в более убранное положение, чем первое положение, согласно изобретению;
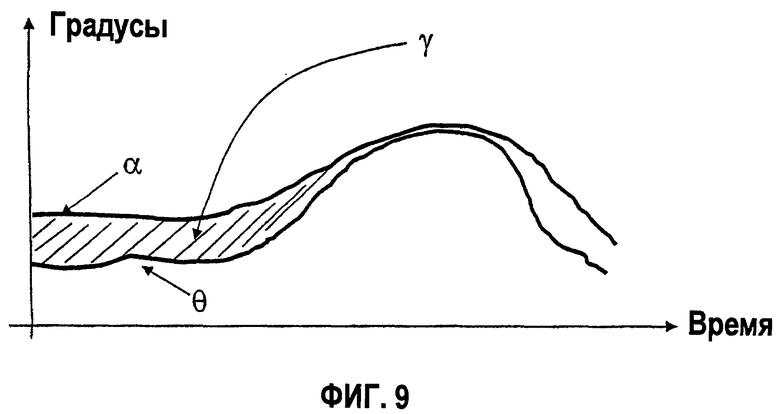
фиг.9 - диаграмму изменения угла наклона траектории, угла атаки и угла тангажа самолета для высоты, изменяющейся в функции времени в диапазоне от 40 м до земли;
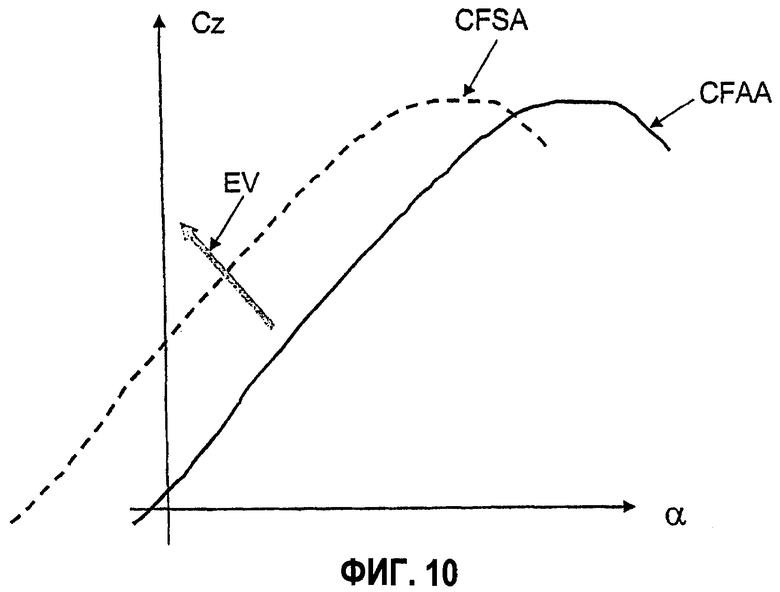
фиг.10 - диаграмму для конфигурации самолета при осуществлении заключительной фазы захода на посадку перед приземлением, влияния выпуска закрылков на изменение коэффициента подъемной силы самолета в функции его угла атаки, причем здесь закрылки переходят из первого выпущенного положения во второе положение, более выпущенное, чем первое положение, согласно изобретению;
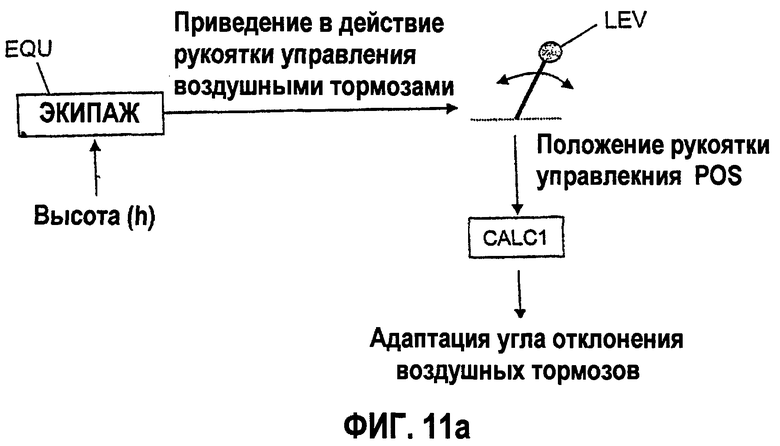
фиг.11а - схему устройства с ручным управлением, предназначенного для улучшения маневренных характеристик летательного аппарата в процессе заключительной фазы захода на посадку перед приземлением с последующим выравниванием, согласно изобретению;
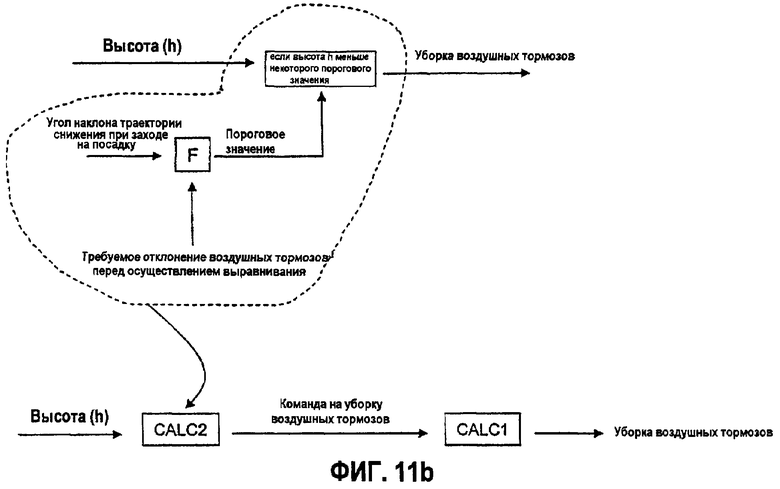
фиг.11b - схему устройства с автоматическим управлением, предназначенного для улучшения маневренных характеристик летательного аппарата в процессе заключительной фазы захода на посадку перед приземлением с последующим выравниванием, согласно изобретению;
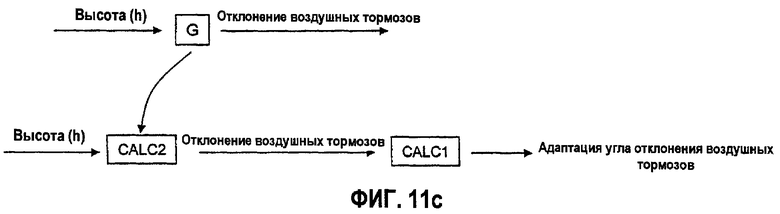
фиг.11с - схему варианта реализации устройства, показанного на фиг.11b, согласно изобретению.
Тяжелый гражданский транспортный самолет А/С (фиг.1) содержит два крыла 1.
Каждое крыло 1 (фиг.2) содержит переднюю кромку 2, заднюю кромку 3, верхнюю поверхность крыла 4 и корневую часть Е крыла.
Передняя кромка 2 крыла образована по меньшей мере одним отклоняемым предкрылком 5.
Задняя кромка 3 крыла 1 образована располагающимися рядом друг с другом задними кромками множеством примыкающих один к другому закрылков 6.
На верхней поверхности крыла 4, спереди по потоку по отношению к закрылкам 6 (по отношению к направлению аэродинамического течения потока на крыле 1), расположено множество не являющихся несущими отклоняемых щитков 7, форма которых на виде сверху имеет форму прямоугольника или прямоугольной трапеции.
В убранном положении (фиг.2 и 3) задняя кромка каждого из не являющихся несущими отклоняемых щитков 7 опирается на закрылок 6 и верхняя поверхность отклоняемого щитка 7 обеспечивает аэродинамическую непрерывность между верхней поверхностью 4 крыла 1 и верхней поверхностью 13 закрылка 6.
Кроме того, каждый отклоняемый щиток 7 связан с конструкцией 9 крыла 1 при помощи наклонного рычага, образованного подъемником 14, концы 15 и 16 которого шарнирно закреплены соответственно на упомянутой конструкции 9 крыла и на отклоняемом щитке 7.
В убранном положении не являющегося несущим отклоняемого щитка 7 (фиг.2 и 3) подъемник 14 создает некоторое усилие, предназначенное для того, чтобы удержать щиток в убранном положении.
В случае, когда подъемник 14 приводится в действие в направлении его удлинения, отклоняемый щиток 7 постепенно поворачивается вокруг оси 10 и выпускается.
Для выпущенного положения (фиг.4), при угле отклонения В отклоняемый щиток 7 позволяет уменьшить подъемную силу и увеличить лобовое сопротивление крыла 1 пропорционально величине угла отклонения В.
Хотя на фиг.4 представлено только одно выпущенное положение, соответствующее одной величине угла отклонения В, ясно, что отклоняемый щиток 7 также может занимать одно или несколько других выпущенных положений, соответствующих другим величинам этого угла.
В соответствии с предлагаемым изобретением управление воздушными тормозами осуществляется соответствующим образом в процессе заключительной фазы захода на посадку по крутой глиссаде перед приземлением и последующего выравнивания, чтобы улучшить маневренные характеристики летательного аппарата.
На практике воздушные тормоза устанавливают в первое выпущенное положение в процессе заключительной фазы захода на посадку перед приземлением и, исходя из некоторой заданной высоты и в случае захода на посадку по крутой глиссаде, управляют переводом воздушных тормозов во второе положение, более убранное, чем первое положение.
Уборка воздушных тормозов из первого положения во второе положение осуществляется без рецепта до тех пор, пока шасси находится под нагрузкой. Такое отклонение на крутой глиссаде не сопровождается изменением конфигурации летательного аппарата (например, изменением тяги, как в патенте US 3589648), чтобы компенсировать действие этих воздушных тормозов.
Угол отклонения воздушных тормозов уменьшается, например, постепенно, вплоть до некоторого уровня, приемлемого для начала выравнивания, причем воздушные тормоза продолжают убираться в процессе маневра до достижения полностью убранного положения, так называемого положения 0.
Например, воздушные тормоза отклоняются на 30° в процессе заключительной фазы захода на посадку, а затем на высоте 40 м от земли начинают убираться. В начале выравнивания, например, на высоте 20 м от земли, воздушные тормоза убираются до угла 15° и продолжают постепенно убираться вплоть до положения 0°, которое достигается, например, на высоте 10 м.
На практике уборка воздушных тормозов из первого положения во второе положение осуществляется без реверса до тех пор, пока шасси находится под нагрузкой.
Уборка воздушных тормозов происходит, например, автоматически таким образом, чтобы не увеличивать рабочую нагрузку экипажа в этой критической фазе полета.
На практике управление уборкой воздушных тормозов основывается на информации о высоте полета.
Высота полета, на которой предлагаемая система обеспечивает выдачу команды на уборку воздушных тормозов, рассчитывается в функции скорости уборки отклоняемых поверхностей, их исходного положения, требуемого положения воздушных тормозов в момент начала выравнивания и вертикальной скорости снижения таким образом, чтобы удовлетворялось следующее соотношение:

где: ВА - отклонение воздушных тормозов в процессе захода на посадку; BF - требуемый угол отклонения в момент начала выравнивания на высоте, например, 60 футов или 18 метров; RS - скорость уборки воздушных тормозов; Vz - вертикальная скорость самолета в процессе захода на посадку; Hra - высота уборки воздушных тормозов; Har - высота начала выравнивания.
Уборка воздушных тормозов компенсируется известным воздействием закона пилотирования на управление углом тангажа.
Предпочтительным образом устройство в соответствии с предлагаемым изобретением воссоздает для пилота условия окружающей среды и внешние ориентиры, которые он привык воспринимать в процессе захода на посадку по классической схеме, т.е. угол наклона траектории снижения на глиссаде имеет величину порядка -3° или около того, имея при этом возможность использовать воздушные тормоза в фазе снижения для увеличения угла наклона самолета (угла атаки).
Кроме того, переводя самолет в "обычную" аэродинамическую конфигурацию, также воссоздают известные и удовлетворительные маневренные характеристики самолета.
Другими словами, уборка воздушных тормозов позволяет осуществить выравнивание, обеспечивающее сохранение по существу той же самой величины угла атаки. Таким образом, в процессе фазы выравнивания, выполняемой после заключительной фазы захода на посадку по крутой глиссаде, уборка воздушных тормозов позволяет осуществить реализацию маневра, в частности выравнивания, с ориентирами, в частности внешними визуальными ориентирами, по существу идентичными тем, которые экипажи самолетов воспринимают в процессе осуществления выравнивания, выполняемого при классическом заходе на посадку, то есть заходе на посадку с углом наклона траектории снижения -3°. Действительно, подъемная сила, необходимая для перелома траектории, создается без существенного увеличения угла атаки, а только в результате изменения аэродинамической конфигурации данного летательного аппарата, в частности в результате уборки воздушных тормозов.
Это "непосредственное" создание подъемной силы в результате уборки воздушных тормозов оказывается более быстрым и обеспечивает улучшение маневренных характеристик в критической фазе полета.
Таким образом, перелом траектории может быть непосредственно воспринят пилотом как изменение углового положения самолета, причем величины этого изменения вполне сопоставимы с их изменениями, происходящими при осуществлении классических заходов на посадку с относительно небольшим углом наклона траектории снижения на уровне -3°.
Использование устройства в соответствии с предлагаемым изобретением выполнено, например, на самолете аэробус А318, который должен обеспечивать осуществление заключительной фазы захода на посадку перед приземлением по крутым глиссадам, соответствующим, например, углам наклона траектории снижения вплоть до -5,5°.
На фиг.6 представлена диаграмма, иллюстрирующая изменение коэффициента подъемной силы самолета в функции угла атаки заключительной фазы захода на посадку перед приземлением при небольших углах наклона траектории снижения самолета.
В описываемом варианте реализации воздушные тормоза убраны. Кривая CFSA соответствует так называемой аэродинамической конфигурации "без воздушных тормозов", то есть в этой конфигурации воздушные тормоза полностью убраны.
На диаграмме также жирной линией показано изменение ЕСА1, соответствующее изменению коэффициента подъемной силы в процессе фазы выравнивания.
В процессе захода на посадку при небольших углах наклона траектории снижения (γ1 = -3°) угол α1арр атаки соответствует коэффициенту подъемной силы при заходе на посадку Cz1app. Например, угол α1арр атаки может быть приблизительно равен 8°.
Угол α1 атаки при выравнивании самолета соответствует коэффициенту Cz1 подъемной силы, необходимому для этого выравнивания, причем коэффициент Cz1 представляет собой коэффициент подъемной силы, необходимый для создания коэффициента перегрузки, требуемого для перелома траектории, достаточного для условий захода на посадку с углом наклона траектории снижения, составляющим -3°. Например, угол α1 имеет величину 9,5°. При этом угол наклона траектории снижения в конце фазы выравнивания составляет, например, -1°.
Изменение угла атаки Δα1 (α1 - α1арр) в процессе выравнивания составляет, например, 1,5°.
Угол Θ1 тангажа при касании взлетно-посадочной полосы колесами основной стойки шасси самолета составляет примерно 8,5°. При этом изменение угла ΔΘ1 тангажа в процессе выравнивания составляет около 3,5°.
На фиг.7 приведены характеристики самолета на заключительной фазе захода на посадку перед приземлением для крутой глиссады, где угол наклона траектории захода на посадку составляет, например, γ2 = -5,5°.
В описываемом варианте воздушные тормоза выпущены в процессе заключительной фазы захода на посадку перед приземлением и последующим выравниванием. При этом кривая CFAA, выполненная сплошной линией, соответствует так называемой динамической конфигурации "с выпущенными воздушными тормозами".
Пунктирной линией показана кривая CFSA, соответствующая конфигурации без воздушных тормозов.
На этой диаграмме также представлено жирной линией изменение ЕСА2, соответствующее изменению коэффициента подъемной силы в процессе осуществления фазы выравнивания.
Угол α2арр атаки соответствует коэффициенту Cz2app подъемной силы при заходе на посадку. Например, этот угол α2арр атаки составляет около 9°.
Угол α2 атаки при осуществлении фазы выравнивания соответствует коэффициенту Cz2 подъемной силы, требуемому для выполнения выравнивания, причем коэффициент Cz2 подъемной силы представляет собой коэффициент подъемной силы, необходимый для создания коэффициента перегрузки, требуемого для перелома траектории, достаточного для угла наклона траектории снижения, составляющего -5,5°. Этот угол α2 атаки может иметь величину, например, 12°.
Изменение угла Δα2 = (α2 - α2арр) атаки в процессе осуществления выравнивания составляет, например, 3°.
Угол Θ2 тангажа при касании взлетно-посадочной полосы колесами основной стойки шасси самолета составляет, например, около 11°. При этом изменение угла ΔΘ2 тангажа в процессе осуществления выравнивания составляет около 7,5°.
В описываемом варианте реализации изменение угла ΔΘ2 тангажа оказывается достаточно существенным и значительно отличающимся от изменения угла тангажа, наблюдаемого в предшествующем случае фазы выравнивания, выполняемой после захода на посадку по классической глиссаде при угле наклона траектории снижения, составляющем -3°, что делает маневренные характеристики данного летательного аппарата достаточно деликатными.
На фиг.8 представлены характеристики самолета, осуществляющего заход на посадку по крутой глиссаде при γ2 = 5,5°.
При этом воздушные тормоза переходят из выпущенного положения (кривая CFAA) в убранное положение (кривая CFSA) в соответствии с предлагаемым изобретением в процессе осуществления заключительной фазы захода на посадку перед приземлением и последующим выравниванием самолета. Этот переход от одной кривой к другой соответствует отклонению воздушных тормозов из выпущенного положения в более убранное положение. Например, это отклонение происходит постепенно со скоростью порядка 5° в секунду.
На диаграмме также представлено показанное жирной линией изменение ЕСА3, соответствующее изменению коэффициента подъемной силы в процессе выравнивания.
При этом угол α2арр атаки соответствует коэффициенту Cz2app подъемной силы при заходе на посадку. Этот угол α2арр атаки составляет, например, около 9°.
Угол атаки для осуществления выравнивания соответствует в заявленном изобретении углу атаки, необходимому для обеспечения коэффициента подъемной силы Cz2 на кривой CFSA, то есть α3 = 9,5°.
Изменение угла Δα3 атаки в процессе осуществления выравнивания (α3 - α2арр) составляет, таким образом, 0,5°, то есть позволяет по существу сохранить тот же угол атаки.
Таким образом, при угле Θ2 = Θ3 тангажа в фазе захода на посадку, составляющем 3,5°, получают, в соответствии с предлагаемым изобретением, изменение угла ΔΘ3 тангажа в фазе выравнивания, составляющее 5°.
Численная величина показывает, что изменение угла тангажа в процессе выравнивания (ΔΘ3 = 5°) при использовании устройства в соответствии с предлагаемым изобретением в процессе осуществления захода на посадку по крутой глиссаде, то есть при γ = -5,5°, оказывается менее значительным, чем изменение угла тангажа в процессе выравнивания (ΔΘ2 = 7,5°) без использования устройства согласно изобретению в процессе захода на посадку по крутой глиссаде. Таким образом, изменение угла тангажа оказывается сопоставимым с его изменением (ΔΘ1 = 3,5°), полученным для пологой глиссады.
На фиг.9 представлено изменение угла наклона траектории, угла атаки и угла тангажа для высоты, изменяющейся в функции времени от 40 м до касания земли. Можно видеть, что изменение угла наклона траектории непосредственно связано с изменением угла тангажа и угла атаки.
На фиг.10 представлены кривые CFSA и CFAA, описанные выше со ссылками на фиг.6-8.
Улучшение маневренных характеристик летательного аппарата в процессе заключительной фазы захода на посадку по крутой глиссаде перед приземлением и последующего выравнивания самолета также может быть обеспечено при помощи соответствующего управления закрылками. Это улучшение характеристик оказывается аналогичным улучшению, полученному при помощи управления воздушными тормозами, описанного выше.
При этом закрылки устанавливают в первое выпущенное положение в процессе осуществления заключительной фазы захода на посадку перед приземлением, а затем, начиная с некоторой заданной высоты и в случае захода на посадку по крутой глиссаде, управляют их переводом во второе положение, более выпущенное, чем первое положение.
При этом закрылки переходят из первого выпущенного положения (кривая CFAA) во второе в большей степени выпущенное положение (кривая CFSA) в соответствии с предлагаемым изобретением в процессе заключительной фазы захода на посадку перед приземлением и последующего выравнивания самолета. Этот переход EV от одной кривой к другой соответствует отклонению закрылков из одного выпущенного положения в другое еще более выпущенное положение. Это отклонение, например, является постепенным и происходит со скоростью около 5° в секунду.
При этом управление перемещением закрылков может быть, например, автоматическим.
На практике выпуск закрылков из первого положения во второе положение является постепенным.
Управление выпуском воздушных тормозов и управление выпуском закрылков является сопряженным.
На фиг.11а представлено устройство с ручным приведением в действие уборки воздушных тормозов.
При этом самолет имеет в своем составе вычислитель управления полетом CALC 1.
Наблюдая за некоторым выбранным параметром, которым на практике является высота полета самолета, экипаж самолета вручную управляет, путем воздействия на рукоятку управления LEV воздушными тормозами, положением POS, например, полностью убранным положением, воздушных тормозов. Положение рычага управления POS детектируется вычислителем управления полетом CALC1, который в соответствии с этим положением управляет выпуском или уборкой воздушных тормозов. На практике уборка воздушных тормозов является постепенной и осуществляется, например, со скоростью 5° в секунду.
На фиг.11b представлено включение, при достижении некоторого порогового значения высоты, и автоматическое приведение в действие воздушных тормозов.
В данном случае речь идет о более продвинутом способе реализации (автоматическая уборка воздушных тормозов), преимущество которого заключается в снижении рабочей нагрузки экипажа.
Логическая схема, содержащая пороговое значение высоты полета и угол отклонения воздушных тормозов, принятый в функции этой высоты, содержится в вычислителе CALC2.
Команда на уборку воздушных тормозов в нулевое положение или в некоторое другое предварительно определенное положение затем подается в вычислитель CALC1, который формирует управляющую команду и обеспечивает тем самым соответствующее отклонение воздушных тормозов.
На фиг.11с представлен вариант описанного выше способа функционирования, для которого положение воздушных тормозов представляет собой непрерывную функцию высоты полета самолета. Управление заданным положением воздушных тормозов осуществляется уже не на основе некоторого одного заданного значения высоты, как это было описано выше со ссылками на фиг.11b, а в соответствии с заданным значением высоты.
Функция G представляет собой непрерывную функцию высоты, причем каждому значению высоты соответствует некоторое отклонение воздушных тормозов.
Логическая схема для выполнения этой функции находится в вычислителе CALC2. Положение воздушных тормозов, определенное в вычислителе CALC2, передается в вычислитель CALC1, который управляет положением воздушных тормозов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ИНДИКАЦИИ ВЗЛЕТА И ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2016 |
|
RU2647344C2 |
| ЛЕГКИЙ СВЕРХЗВУКОВОЙ МНОГОЦЕЛЕВОЙ САМОЛЕТ | 2004 |
|
RU2271305C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2008 |
|
RU2466907C1 |
| Способ управления движением самолета при посадке | 1989 |
|
SU1819805A1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ПОСАДКИ ЛЕТАТЕЛЬНОГО АППАРАТА В СЛОЖНЫХ МЕТЕОРОЛОГИЧЕСКИХ УСЛОВИЯХ, В ТОМ ЧИСЛЕ БЕСПИЛОТНОГО | 2015 |
|
RU2585197C1 |
| СПОСОБ ВЫПОЛНЕНИЯ СНИЖЕНИЯ ПРИ ЗАХОДЕ НА ПОСАДКУ | 2002 |
|
RU2280888C2 |
| САМОЛЁТ ВЕРТИКАЛЬНОГО ВЗЛЁТА И ПОСАДКИ | 2018 |
|
RU2742496C2 |
| СПОСОБ ПОСАДКИ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА АЭРОДИНАМИЧЕСКОГО ТИПА | 2005 |
|
RU2278801C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2003 |
|
RU2235045C1 |
| КОНВЕРТОПЛАН КОРОТКОГО ВЗЛЕТА И ПОСАДКИ | 2022 |
|
RU2790460C1 |
Группа изобретений относится к области управления воздушными транспортными средствами. По первому варианту в процессе осуществления заключительной фазы захода на посадку воздушные тормоза устанавливают в некоторое первое выпущенное положение, по кривой CFAA. В функции некоторого параметра, являющегося репрезентативным для заданной высоты, и в случае захода на посадку по крутой глиссаде, обеспечивают управление переводом воздушных тормозов во второе положение, более убранное, чем первое положение, по кривой CFSA таким образом, чтобы обеспечить процесс выравнивания летательного аппарата, позволяющий сохранить по существу тот же угол атаки, соответствующий, в случае осуществления заключительной фазы захода на посадку по крутой глиссаде. Выполняют фазы выравнивания с внешними ориентирами пилотирования. По второму варианту в процессе осуществления заключительной фазы захода на посадку автоматически возбуждают постепенный перевод воздушных тормозов во второе положение, более убранное, чем первое положение, для поддержания по существу того же угла атаки летательного аппарата во время фазы последующего выравнивания летательного аппарата. Группа изобретений направлена на улучшение маневренных характеристик летательного аппарата. 2 н. и 20 з.п. ф-лы, 13 ил.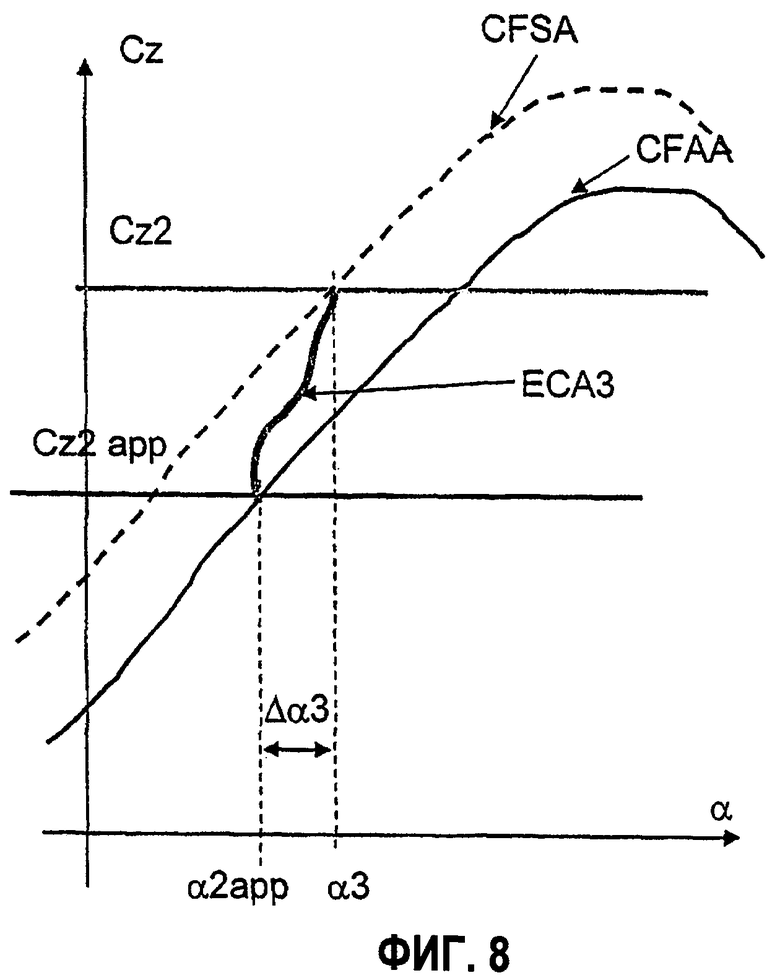
1. Способ улучшения маневренных характеристик летательного аппарата в процессе фазы захода на посадку и фазы последующего выравнивания, причем летательный аппарат оборудован воздушными тормозами, заключающийся в том, что
на фазе захода на посадку в случае захода на посадку по крутой глиссаде осуществляют следующие шаги:
выпускают и, по существу, удерживают воздушные тормоза в первом выпущенном положении в процессе заключительной фазы захода на посадку для достижения угла атаки летательного аппарата в течение фазы захода на посадку,
при этом в функции параметра, являющегося репрезентативным для заданной высоты, возбуждают постепенный перевод воздушных тормозов так, чтобы воздушные тормоза были убраны, причем в самом начале фазы последующего выравнивания летательного аппарата, которое сопровождается крутым углом посадки, во второе положение, более убранное, чем первое положение, для поддержания, по существу, того же угла атаки летательного аппарата во время фазы последующего выравнивания летательного аппарата.
2. Способ по п.1, отличающийся тем, что уборку воздушных тормозов в более убранное положение осуществляют так, чтобы летательный аппарат достигал фазы последующего выравнивания путем пилотирования по внешним ориентирам, которые аналогичны ориентирам летательного аппарата, имеющего классическую фазу последующего выравнивания и классический угол посадки около 3°.
3. Способ по п.1, отличающийся тем, что уборку воздушных тормозов осуществляют постепенно.
4. Способ по п.1, отличающийся тем, что уборку воздушных тормозов осуществляют из первого полностью выпущенного положения до второго полностью убранного положения.
5. Способ по п.1, отличающийся тем, что уборку воздушных тормозов осуществляют из первого, по меньшей мере, частично выпущенного положения, до второго, по меньшей мере, частично убранного положения.
6. Способ по любому из пп.1-5, отличающийся тем, что летательный аппарат снабжен закрылками, при этом дополнительно выпускают закрылки в первое выпущенное положение в процессе фазы захода на посадку, а затем в функции параметра, являющегося репрезентативным для заданной высоты, и при заходе на посадку по крутой глиссаде возбуждают перевод закрылков во второе положение, более выпущенное, чем первое положение.
7. Способ по п.6, отличающийся тем, что управление выпуском закрылков осуществляют автоматически.
8. Способ по п.6, отличающийся тем, что выпуск закрылков осуществляют постепенно.
9. Способ по п.1, отличающийся тем, что летательный аппарат снабжен закрылками, при этом дополнительно выпускают закрылки в первое выпущенное положение в процессе фазы захода на посадку, а затем в функции параметра, являющегося репрезентативным для заданной высоты, и при заходе на посадку по крутой глиссаде возбуждают перевод закрылков во второе положение, более выпущенное, чем первое положение, причем управление воздушными тормозами и управление закрылками осуществляют сопряженным образом.
10. Способ улучшения маневренных характеристик летательного аппарата в процессе фазы захода на посадку и фазы последующего выравнивания, причем летательный аппарат оборудован воздушными тормозами, заключающийся в том, что
на фазе захода на посадку в случае захода на посадку по крутой глиссаде осуществляют следующие шаги:
используют средство приведения в действие воздушных тормозов и средство управления, предназначенное для управления средством приведения в действие воздушных тормозов, выпускают, и по существу, удерживают воздушные тормоза в первом выпущенном положении в процессе заключительной фазы захода на посадку для достижения угла атаки летательного аппарата в течение фазы захода на посадку,
при этом в функции параметра, являющегося репрезентативным для заданной высоты, причем в самом начале фазы последующего выравнивания летательного аппарата, которое сопровождается крутым углом посадки, автоматически возбуждают постепенный перевод воздушных тормозов во второе положение, более убранное, чем первое положение, для поддержания, по существу, того же угла атаки летательного аппарата во время фазы последующего выравнивания летательного аппарата.
11. Способ по п.10, отличающийся тем, что указанный перевод воздушных тормозов в более убранное второе положение осуществляют без модификации конфигурации летательного аппарата, чтобы компенсировать перевод воздушных тормозов.
12. Способ по п.10, отличающийся тем, что указанный перевод воздушных тормозов в более убранное второе положение осуществляют без регулирования тяги летательного аппарата, чтобы компенсировать перевод воздушных тормозов.
13. Способ по п.10, отличающийся тем, что дополнительно осуществляют постепенный перевод воздушных тормозов из второго положения в более убранное третье положение во время фазы выравнивания летательного аппарата.
14. Способ по п.13, отличающийся тем, что постепенный перевод воздушных тормозов не является реверсируемым во время фазы выравнивания летательного аппарата.
15. Способ по п.13, отличающийся тем, что указанное третье положение является полностью убранным положением.
16. Способ по п.10, отличающийся тем, что перевод воздушных тормозов осуществляют без реверса, так что угол развертывания воздушных тормозов не увеличивается после развертывания до тех пор, пока шасси находятся под нагрузкой.
17. Способ по п.10, отличающийся тем, что изменение указанного угла атаки между фазой захода на посадку и фазой последующего выравнивания меньше 0,5°.
18. Способ по п.10, отличающийся тем, что указанный крутой угол составляет менее - 4,5°.
19. Способ по п.10, отличающийся тем, что указанное возбуждение для перевода воздушных тормозов осуществляют в функции вертикальной скорости снижения летательного аппарата.
20. Способ по п.10, отличающийся тем, что указанное возбуждение для перевода воздушных тормозов осуществляют в функции высоты на фазе выравнивания летательного аппарата.
21. Способ по п.20, отличающийся тем, что указанное возбуждение для перевода воздушных тормозов осуществляют в самом начале фазы выравнивания летательного аппарата.
22. Способ по п.10, отличающийся тем, что указанный угол атаки летательного аппарата во время фазы захода на посадку составляет около 9°.
| US 3589648 A, 29.06.1971 | |||
| Способ управления движением самолета при посадке | 1989 |
|
SU1819805A1 |
| SU 1820595 C, 20.01.1996 | |||
| ЛИГУМ Т.И | |||
| Аэродинамика и динамика полета турбореактивных самолетов | |||
| - М.: ТРАНСПОРТ, 1979, с.174-185. | |||

