ОБЛАСТЬ ТЕХНИКИ
Изобретение относится к системе управления для транспортного средства, включающей центральный блок управления и систему датчиков, размещенных в транспортном средстве с возможностью изменения температуры системы датчиков, причем упомянутая система датчиков включает инерциальный измерительный модуль, оборудованный микроэлектромеханическим акселерометром и микроэлектромеханическим гирометром, формирующими сигналы. Упомянутый инерциальный измерительный модуль снабжает центральный блок управления цифровой информацией, относящейся к поведению транспортного средства, с помощью процессора цифровых сигналов, с целью активизации и/или деактивизации по меньшей мере одной электронной системы транспортного средства.
УРОВЕНЬ ТЕХНИКИ
Известно, что инерциальные измерительные модули (IMU) можно использовать для обеспечения более точного управления в различных системах. Например, известно использование в авиации сложных инерциальных измерительных модулей, включающих комбинацию гирометров, которые используют для эффективной и точной навигации. Однако такие модули, особенно гирометры, требуют применения механических частей, изготовленных с высокой точностью, и других дорогих частей.
Развитие электроники сделало возможным производство датчиков, например гирометров, на основе микроэлектромеханических систем (MEMS). В отличие от гирометра, созданного на основе исключительно механических частей, гирометр на основе микроэлектромеханических систем, очень дешев, его стоимость составляет лишь часть стоимости механического гирометра. Справедливость этого ценового соотношения сохраняется также и для других микроэлектромеханических датчиков, например акселерометров. Как следствие, возможности включать дополнительные датчики, например включающие пирометры, в различные системы значительно расширились благодаря их умеренной стоимости. Кроме того, микроэлектромеханические датчики занимают мало места.
Известно много систем, в которых используют микроэлектромеханические датчики, например акселерометры, для улучшения навигации транспортного средства (инерциальная навигационная система, INS), см., например, WO 0109637 и US 6282496, или для повышения безопасности транспортного средства, см., например, US 5504482, US 5805079, ЕР 709257 и US 5014810.
Кроме того, известны другие различные приложения, которые также предполагают использование микроэлектромеханических гирометров. Например, из US 6516238, US 6480152 и US 5504482 известна система, в которой предлагается использовать микроэлектромеханическую инерциальную навигационную систему, включающую микроэлектромеханические гирометрические датчики, чтобы обеспечить безопасное управление и навигацию транспортного средства. Однако эти последние системы основаны на использовании датчиков земного магнетизма для калибровки блоков управления, что делает такую систему сложной и относительно дорогой.
Кроме того, общая проблема этих известных систем, включая микроэлектромеханические гирометры, состоит в том, что их точность относительно низка. Например, у имеющихся на рынке гирометров дрейф достигает 6 град/с. Очевидно, что такая низкая точность ведет к существенному сужению границ практического использования систем управления, включающих микроэлектромеханические гирометры.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Цель этого изобретения состоит в том, чтобы устранить или по меньшей мере минимизировать вышеупомянутые недостатки, и она достигается путем создания системы управления для транспортного средства, включающей центральный блок управления и систему датчиков, размещенных в транспортном средстве с возможностью изменения температуры системы датчиков, причем упомянутая система датчиков включает инерциальный измерительный модуль, оборудованный микроэлектромеханическим акселерометром и микроэлектромеханическим гирометром, формирующими сигналы. Упомянутый инерциальный измерительный модуль снабжает упомянутый центральный блок управления цифровой информацией, относящейся к поведению упомянутого транспортного средства, с помощью процессора цифровых сигналов, с целью активизации и/или деактивизации по меньшей мере одной электронной системы транспортного средства, причем упомянутый процессор цифровых отсчетов снабжен предварительно сохраненными данными, относящимися к каждому из упомянутых датчиков и к устройству приема входных данных, чтобы корректировать упомянутую цифровую информацию перед интегрированием и таким образом передавать откорректированную точную цифровую информацию в упомянутый центральный блок управления.
Благодаря изобретению погрешность, присущую микроэлектромеханическому датчику и особенно гирометру, можно эффективно корректировать и создавать чрезвычайно эффективные по стоимости высокоточные датчики, требующие для своего размещения чрезвычайно малого пространства. Как следствие, может быть достигнута неожиданная синергия при использовании таких микроэлектромеханических датчиков, особенно включающих гирометр, в системах управления для транспортных средств, так как оно способствуют рентабельному производству инерциальных измерительных модулей, которые отличаются высокой точностью и которые благодаря своему малому размеру могут быть установлены в многочисленные подвижные объекты различных видов, обеспечивая улучшенные функциональные возможности во многих различных областях, например в навигации, обеспечении безопасности и т.д. Оказалось, что использование таких микроэлектромеханических модулей позволяет добиться особенно существенных синергетических эффектов в повышении внутренней безопасности пассажиров транспортных средств. Здесь использование термина «пассажиры» также распространяется и на водителя.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Далее изобретение будет описано в связи с приложенными чертежами, на которых:
фиг.1 схематически показывает автомобиль, оборудованный системой управления, в соответствии с предпочтительной реализацией изобретения;
фиг.2 показывает предпочтительные принципы построения центральной системы управления, согласно изобретению, в отношении входных и выходных данных;
фиг.3 показывает предпочтительную схему центрального блока управления согласно изобретению;
фиг.4 показывает предпочтительный схематический вид инерциального измерительного модуля согласно изобретению, и
фиг.5 показывает детали модуля цифровой обработки сигналов в соответствии с изобретением;
фиг.6 показывает предпочтительную реализацию гибко-жесткой платы модуля гирометра, и
фиг.7 показывает предпочтительный готовый модуль гирометра.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
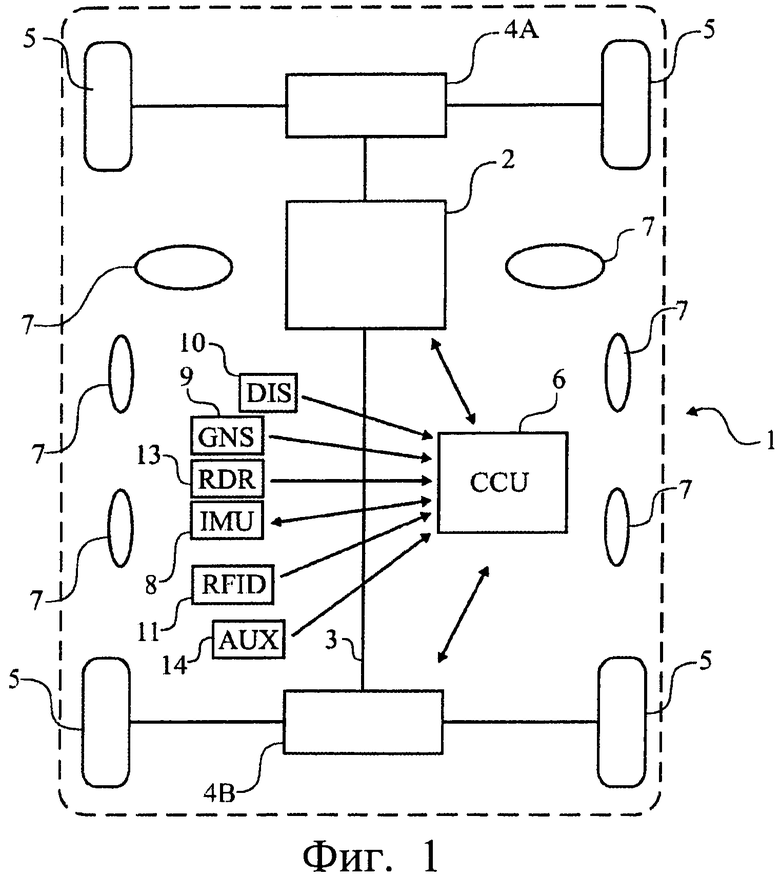
Фиг.1 иллюстрирует принципы предпочтительной реализации изобретения, где транспортное средство 1 в виде автомобиля оборудовано некоторыми основными и некоторыми опциональными средствами. Автомобиль 1 снабжен двигателем 2, который передает мощность колесам через трансмиссию 3. На каждом конце трансмиссионной линии 3 показаны "черные ящики" 4А, 4В, предназначенные для отображения в символической форме известного оборудования транспортного средства, которое можно использовать, чтобы индивидуально управлять каждым колесом 5. Соответственно, это оборудование 4А, 4В содержит ряд подсистем, например тормозную систему, включающую подходящие датчики (например, для АБС (антиблокировочной системы тормозов), ESP (электронной системы курсовой устойчивости) и т.д.), активную подвеску, активные дифференциалы и т.д. Кроме того, транспортное средство 1 оборудовано рядом других электронных подсистем различного назначения, например, для управления подушками 7 безопасности. Всеми этими электронными системами можно управлять с помощью центрального блока 6 управления (CCU).
Центральный блок 6 управления получает входные данные от ряда различных датчиков и измерительных модулей. Имеется инерциальный измерительный модуль (IMU) 8, который предоставляет трехмерную информацию об ускорении и трехмерную информацию о перемещении/вращении (как будет описано ниже более подробно). Далее, показана глобальная навигационная система (GNS) 9, предпочтительно в форме GPS (или DGPS), назначение которой состоит в том, чтобы предоставлять точную информацию позиционирования. Система управления также включает систему 10 информации о водителе (диагностическую информационную систему (DIS)), которая обеспечивает центральный блок управления 6 информацией относительно различных параметров, связанных с поведением водителя, и данными о самом транспортном средстве. Транспортное средство 1 также может быть оборудовано модулем 11 радиочастотной идентификации (RFID), которому путем радиочастотной идентификации можно передавать информацию от местных модулей передачи (не показаны), размещенных вдоль дороги. Также может использоваться радарный модуль (RDR) 13, чтобы обеспечивать центральный блок 6 управления информацией относительно объектов в близком окружении. Наконец, транспортное средство 1 также можно оборудовать вспомогательными датчиками (AUX) 14, предоставляющими информацию любого вида, которая может быть полезной для достижения оптимального использования любого из датчиков, например температурными датчиков, датчиками атмосферного давления, датчиками влажности и т.д.
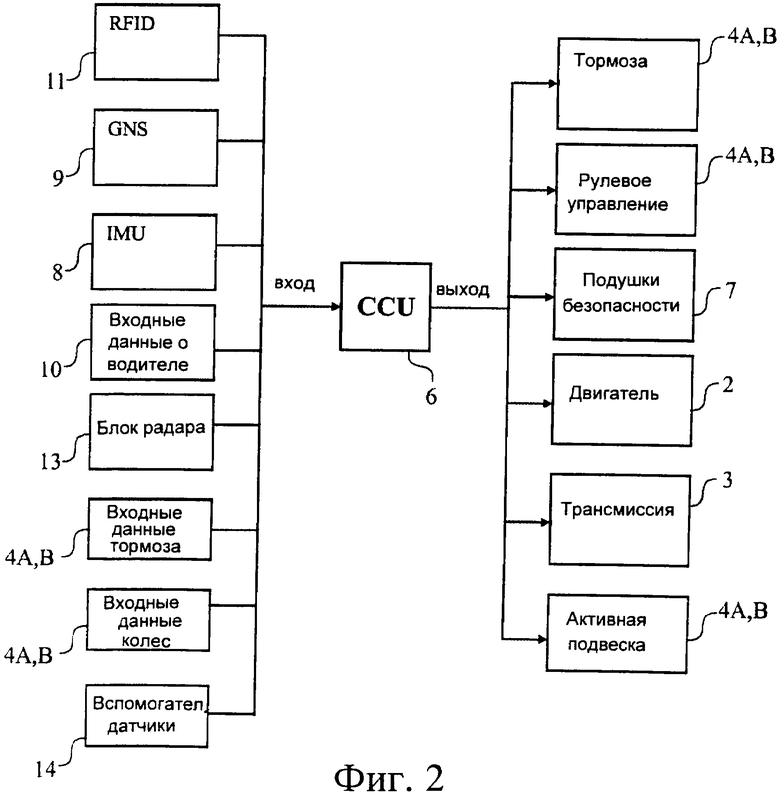
Фиг.2 показывает пример входных данных, которые могут быть предоставлены центральному блоку 6 управления, чтобы сформировать различные выходные данные, необходимые для управления электронными подсистемами транспортного средства. Таким образом, например, входные данные 10 о водителе, входные данные 4А, 4В от тормоза и входные данные 4А, 4В от колеса могут быть использованы центральным блоком 6 управления, чтобы активно управлять тормозами. Аналогично, те же самые входные данные и, возможно, также радарные датчики могут быть использованы, чтобы активно управлять рулевым механизмом. Электронной системой, управляющей подушками 7 безопасности, предпочтительно управляет центральный блок 6 управления на основе входных данных от инерциального измерительного модуля 8, возможно, в комбинации с входными данными от диагностической информационной системы 10 и/или радарных датчиков 13. Подобным же образом центральный блок 6 управления может управлять двигателем на основе входных данных от различных вспомогательных датчиков 14, диагностической информационной системы 10 и модуля 11 радиочастотной идентификации. Трансмиссией 3 и активной подвеской 4А, 4В может предпочтительно управлять центральный блок 6 управления на основе входных данных от инерциального измерительного модуля 8, а также на основе данных от диагностической информационной системы 10. Следовательно, различными подсистемами транспортного средства можно гибко управлять (путем использования соответствующего программного обеспечения), чтобы оптимизировать управление в различных ситуациях на основе любой выбранной комбинации различных входных данных от датчиков, а при этом использование точных данных от инерциальных измерительных модулей обеспечивает неожиданную синергию.
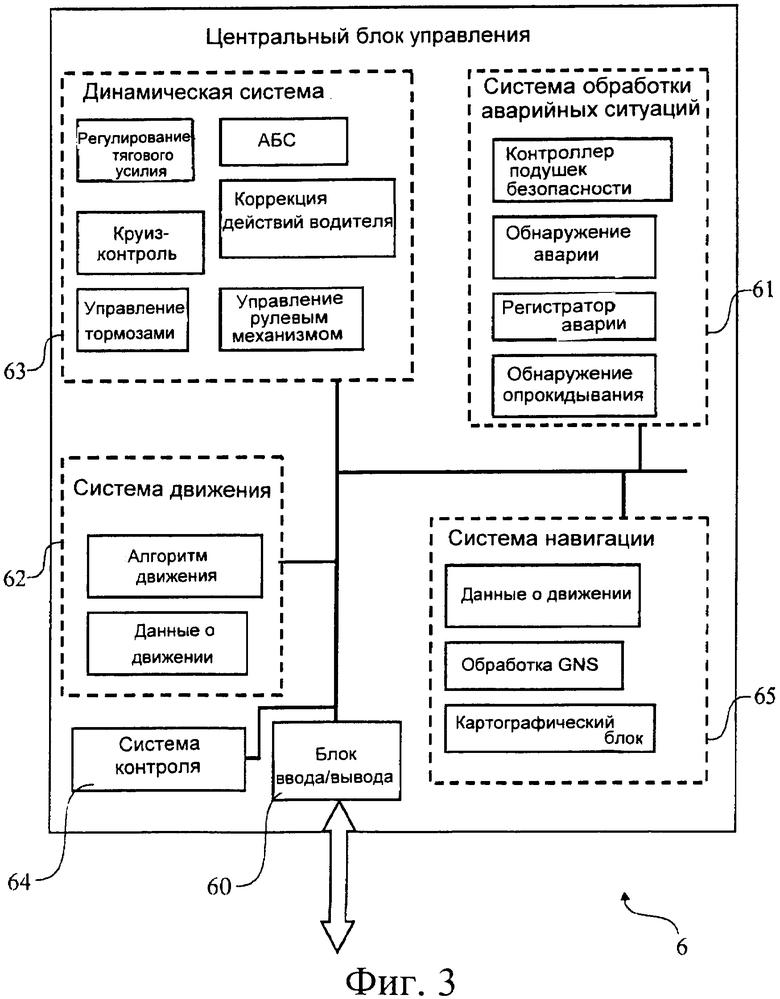
Фиг.3 показывает схематическое изображение центрального блока 6 управления в соответствии с изобретением. Центральный блок 6 управления снабжен необходимыми аппаратными средствами (не показаны), например процессором, модулем памяти и т.д. Соответствующее программное обеспечение помогает центральному блоку 6 управления обеспечивать необходимые функциональные возможности ряда различных электронных подсистем на основе входных данных, которые принимаются с помощью коммуникационного интерфейса 60. Имеется система обработки аварийных ситуаций (CHS), которая управляет активизацией подушек 7 безопасности. Эта система также включает систему обнаружения аварий, которая ей управляет. Система обнаружения аварий использует главным образом входные данные от инерциального измерительного модуля 8, чтобы идентифицировать то, что произошла авария, но может также использовать входные данные из других источников, например от акселерометров, установленных в передней части транспортного средства для более раннего обнаружения лобового столкновения. Система обработки аварийных ситуаций может управлять активизацией подушек безопасности при использовании входных сигналов от инерциальных измерительных модулей и других датчиков, создавая адаптированную к конкретной ситуации последовательность активизации подушек 7 безопасности и других средств обеспечения безопасности. Таким образом, каждая индивидуальная подушка 7 безопасности может быть приведена в действие в оптимальный момент времени. Кроме того, в состав упомянутой системы обработки аварийных ситуаций включено устройство регистрации аварий, которое может сделать запись нужных входных данных во время аварии, чтобы обеспечить последующий анализ причин и протекания аварии, что может быть полезно для создания более безопасной конструкции и/или программы. Кроме того, центральный блок управления включает систему обнаружения опрокидывания, которая может помочь деактивизировать подушки безопасности, чтобы устранить активизацию подушек безопасности в ситуациях, в которых их активизация была бы нежелательной. В центральный блок управления также включена система движения транспортного средства (VMS), которая действует на основе алгоритма движения транспортного средства в комбинации с данными о движении транспортного средства в ближайшей перспективе.
Центральный блок 6 управления также включает динамическую систему транспортного средства (VDS), которую можно использовать, чтобы обеспечить регулирование тягового усилия, антиблокировочное управление тормозами, круиз-контроль, коррекцию действий водителя, управление тормозами и рулевым механизмом, путем активизации и деактивизации в соответствии с входными данными от упомянутой системы датчиков, включающей инерциальный измерительный модуль 8.
Наконец, фиг.3 также показывает, что центральный блок 6 управления включает навигационную систему, действие которой основано на комбинации данных от глобальной навигационной системы (GNS), данных о движении транспортного средства в долговременной перспективе (то есть о предварительно выбранном месте назначения), данных из картографического обрабатывающего модуля, а также данных, полученных путем интерактивной коммуникации с системой движения транспортного средства в случае отказа модуля 9 GNS.
Соответственно, фиг.3 иллюстрирует центральный блок управления, который может предоставить водителю транспортного средства 1 чрезвычайно точную навигационную систему, которая выполняет свои функции, даже если откажет модуль 9 GNS, благодаря комбинированному использованию инерциального измерительного модуля 8. Центральный блок 6 управления также содержит многофункциональную систему обработки аварийных ситуаций, которая обеспечивает оптимизированное управление и активизацию/деактивизацию подушек 7 безопасности внутри транспортного средства, чтобы активировать в зависимости от входных данных конкретный набор подушек 7 безопасности, соответствующий определенной ситуации, которая была зарегистрирована различными датчиками, и таким способом обеспечить оптимальную последовательность их активизации. Известно, что несоответствующая активизация подушек безопасности может оказаться вредной, и соответственно эта функция системы 6 управления согласно изобретению может оказать значительное влияние на уменьшение телесных повреждений при аварии. Благодаря эффективному инерциальному измерительному модулю 8, согласно изобретению, могут быть получены очень точные входные данные, чтобы точно определить, какие меры аварийной защиты необходимо принять в каждой конкретной ситуации, например, путем активизации оптимизированного набора подушек 7 безопасности, чтобы защитить пассажиров именно от такой ситуации, которая в данный момент зарегистрирована датчиками, например инерциальным измерительным модулем 8 и радарным модулем 13, который заранее определяет, как транспортное средство столкнется с окружающими объектами. Кроме того, во время столкновения система обработки может использовать другие средства, например управление торможением и тяговым усилием, путем взаимодействия с динамической системой транспортного средства. Кроме того, центральный блок 6 управления с его системой датчиков также может с помощью улучшенной динамической системы транспортного средства оказывать поддержку каждому водителю индивидуально, помогая водителю управлять транспортным средством в безопасной манере и предохраняя его от опасных действий.
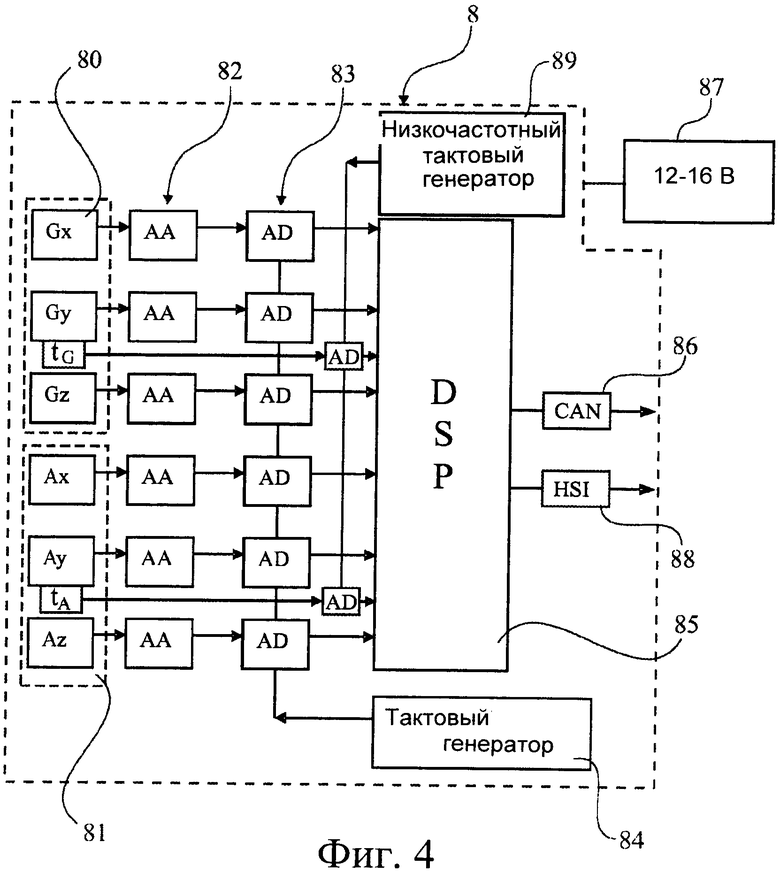
Фиг.4 показывает схематический вид инерциального измерительного модуля 8 в соответствии с изобретением. Здесь показан трехмерный микроэлектромеханический гирометр 80 и трехмерный микроэлектромеханический акселерометр 81. Благодаря измерению по трем пространственным координатам будет обнаружено каждое отклонение в любом направлении и будет сформирован соответствующий сигнал с помощью фильтра (АА) 82 для устранения эффектов наложения спектров. Эти сигналы будут преобразованы в аналого-цифровом преобразователе 83. Аналого-цифровые преобразователи формируют отсчеты согласно сигналу тактового генератора 84 избыточной дискретизации, частота которого лежит в диапазоне 4-20 кГц. Далее, имеются температурные датчики tG и tA, где температурный датчик tG считывает температуру всех гироскопических датчиков Gx, Gy, Gz, a tA, соответственно температуру датчиков акселерометра Ах, Ay, Az. Температурные датчики to и tG соответственно формируют сигналы, из которых с помощью соответствующих аналого-цифровых преобразователей (AD) формируют цифровые сигналы температуры, причем эти аналого-цифровые преобразователи формируют отсчеты согласно сигналу другого тактового генератора 89 дискретизации, частота которого намного ниже, например 1-10 Гц. Эти оцифрованные сигналы поступают в процессор 85 цифровых сигналов (DSP). После обработки в процессоре 85 эти сигналы поступают в шину CAN 86 и/или в высокоскоростной интерфейс 88 (HSI). Для обычных целей используют шину CAN 86, но в некоторых ситуациях информацию необходимо передать как можно быстрее, например в ситуации аварии транспортного средства. Высокоскоростной интерфейс 88 включен в схему именно по этой причине, он обеспечивает быстрый интерфейс для случаев, когда надо передать только самую необходимую информацию. Шина CAN обычно работает на частотах 200-600 Гц, тогда как высокоскоростной интерфейс 88 работает на частотах выше 600 Гц, обычно 1-10 кГц. Инерциальный измерительный модуль получает энергию от преобразователя 87 постоянного тока.
Трехмерный микроэлектромеханический гирометр 80 предпочтительно должен иметь высокую стабильность. Предпочтительно, смещение составляет меньше 100 град/ч, чтобы достичь хорошей точности. Кроме того, важно калибровать смещение как можно чаще, чтобы поддерживать хорошую точность. Это может быть легко достигнуто при использовании гирометра в транспортных средствах, так как обычные транспортные средства довольно часто оказываются в состоянии полной остановки, обеспечивая идеальные условия для калибровки. Когда транспортное средство остановилось, то есть не перемещается относительно земли, акселерометр измеряет ускорение земной гравитации, а гирометр должен показывать нуль (вращение Земли), поскольку отсутствуют какие-либо изменения в положении транспортного средства относительно земли. При калибровке акселерометров можно использовать уклономеры, которые измеряют угол наклона относительно поперечной оси и угловой поворот вокруг вертикальной оси. Это предоставляет простое и эффективное средство для частой калибровки смещения как микроэлектромеханического гироскопа, так и микроэлектромеханического акселерометра, обеспечивая эффективную самодиагностирующую проверку. Такая периодически повторяющаяся калибровка, которая является своего рода непрерывно действующим средством проверки качества (без дополнительных затрат), предоставляет огромное преимущество и обеспечивает эффективное по стоимости и точности использование микроэлектромеханических элементов.
Кроме того, тесты показали, что смещение и стабильность смещения не являются достаточными параметрами, которые надо держать под контролем, чтобы достичь высокой точности. Вместо этого тщательное тестирование показало, что многие параметры микроэлектромеханических модулей нуждаются в компенсировании отклонений, зависящих от влияния окружающей среды. Например, было показано, что смещение и масштабирующий множитель изменяются в разной степени в зависимости от температуры. Нелинейность нужно компенсировать из-за недостаточной линейности микроэлектромеханических систем. Также очень важна полоса пропускания. Путем индивидуального тестирования и регистрации влияния окружающей среды, например температуры, и соответствующей коррекции с помощью процессора цифровых сигналов (DSP), предпочтительно в форме соответствующих алгоритмов, можно сформировать основу для создания инерциальных измерительных модулей, отличающихся чрезвычайно высокой точностью; такой модуль, согласно изобретению, может легко достичь 0,017 сек. Предпочтительно шину CAN и/или высокоскоростной интерфейс 88 используют как интерфейс для связи с центральным блоком 6 управления. Хотя шина CAN, работающая на частотах приблизительно 200-600 Гц, является стандартной для автомобилестроительной отрасли, но более высокая скорость, например отдельный высокоскоростной интерфейс 88, также необходима для эффективной обработки аварийных ситуаций.
Согласно изобретению каждый датчик Gx, Gy, Gz, Ах, Ay, Az предпочтительно имеет свой собственный температурный датчик, передающий (например, для датчика Gx), сигнал tGx, соответствующий фактической температуре в месте расположения датчика Gx. Компенсацию температурного отклонения для каждого датчика процессор цифровых сигналов (DSP) выполняет до интегрирования, благодаря чему достигается рациональная обработка, так как она может быть выполнена независимо от какой-либо периодичности выборки (в отличие от случая, когда интегрирование выполняют согласно известным способам). Предпочтительный алгоритм, который используют для коррекции влияния температуры, является следующим:
kn(tGx-T)n++k2(tGx-T)2+kl(tGx-T)+kT,
где Т - температура, при которой был калиброван датчик, и соответственно kT - показатель коррекции (обычно просто смещение и масштабирующий множитель) при этой температуре. Обычно применение n=3 достаточно, чтобы получить нужную точность, но и достижение более высокой степени точности (например, n=5) не составляет проблемы, так как система согласно изобретению разработана так, что имеет высокую способность обработки, например, путем применения процессора цифровых сигналов, выполняющего арифметические операции с плавающей запятой.
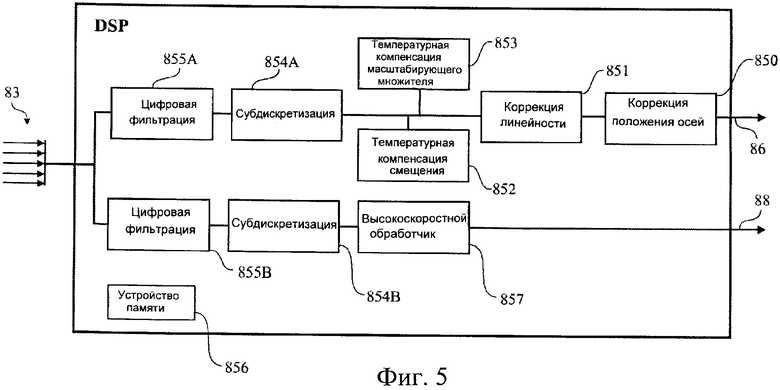
Фиг.5 показывает схематический вид процессора 85 цифровых сигналов (DSP) согласно изобретению. На фиг.5 показаны входные сигналы 83, которые поступают от аналого-цифровых преобразователей. Кроме того, фиг.5 показывает устройство 856 памяти, в котором хранятся данные калибровки, то есть показатели коррекции и алгоритмы коррекции, которые были получены во время первоначальной калибровки (выполненной перед приемо-сдаточными испытаниями) каждого из датчиков Gx, Gy, Gz, Ах, Ay и Az и соответственно сохранены в устройстве 856 памяти. После этого с помощью процессора 85 цифровых сигналов будут выполняться различные коррекции принятых цифровых сигналов.
Для сигналов предусмотрены два канала: один высокоскоростной, где выполняют минимальную обработку сигналов, и канал нормальной обработки. Высокоскоростной канал используют, чтобы передать минимальное количество информации от необходимых гирометров и акселерометров, используя минимальную необходимую обработку сигналов, в приемный модуль с минимальной, насколько возможно, задержкой. Например, в аварийной ситуации будет большим преимуществом, если задержка от момента столкновения до момента, когда система 61 обработки аварийной ситуации (см. фиг.3) получит данные от инерциальных измерительных модулей (IMU), окажется настолько мала, насколько возможно. Это может быть выполнено путем сокращения обработки сигналов в процессоре 85 цифровых сигналов, так как сигналы в аварийной ситуации сравнительно явно выражены и поскольку авария происходит в пределах короткого промежутка времени, и нет необходимости корректировать сигналы в такой степени, как при длительном периоде времени. Кроме того, существует возможность предоставлять только самые важные данные; например, в зависимости от фактической реализации, можно передавать по высокоскоростному каналу только данные акселерометра. Во-первых, выполняется цифровая фильтрация 855 В, которая устраняет посторонние составляющие (шум) из принятых сигналов. Существует возможность использовать цифровую фильтрацию различных типов для нормальной работы инерциальных измерительных модулей и/или для обработки аварийной ситуации (высокоскоростной канал). Сигнал с выхода фильтра затем субдискретизируют с понижением частоты отсчетов до выходной частоты 854В. Выходная частота в высокоскоростном канале и в канале нормальной обработки могут отличаться. После этого высокоскоростной обработчик 857 данных передает соответствующие данные в высокоскоростной интерфейс 88.
В канал нормальной обработки включена, во-первых, цифровая фильтрация 855А, которая устраняет посторонние составляющие (шум) из принятых сигналов. Сигнал с выхода фильтра затем субдискретизируют с понижением частоты отсчетов до выходной частоты 854А. В субдискретизированных данных сначала компенсируют влияние температуры на смещение и влияние температуры на масштабирующий множитель 852, 853. Во-вторых, в канал нормальной обработки включена коррекция 851 линейности, которая корректирует сигналы датчиков, не отличающиеся абсолютной линейностью. В-третьих, в канале нормальной обработки выполняется коррекция 850 положения осей, которая корректирует возможное отклонение, связанное с отклонением осей.
Очевидно, что различные коррекции выполняют путем использования данных, предварительно сохраненных в устройстве 856 памяти, и входных сигналов 83 для каждого из используемых измерительных модулей, которые формируют основу для выполнения коррекции. Различные коррекции выполняют при помощи соответствующих алгоритмов, которые реализованы в процессоре 85 цифровых сигналов.
Выходной сигнал обработки аварийной ситуации может корректироваться в меньшей степени, например без компенсации нелинейности и отклонения осей, и может быть выведен по высокоскоростному интерфейсу с более высокой частотой по сравнению с обычным выходом инерциального измерительного модуля. Далее, существует возможность корректировать данные в высокоскоростном канале 88 путем использования синхронной выборки из нормального канала 86 обработки, например каждого десятого отсчета высокоскоростного канала; если высокоскоростной канал работает на частоте 1000 Гц, то нормальный канал работает на частоте 100 Гц. Конечно, если обработка сигналов выполняется достаточно быстро, то есть с частотой по меньшей мере выше 600 Гц, возможно, нет необходимости создавать отдельный высокоскоростной канал.
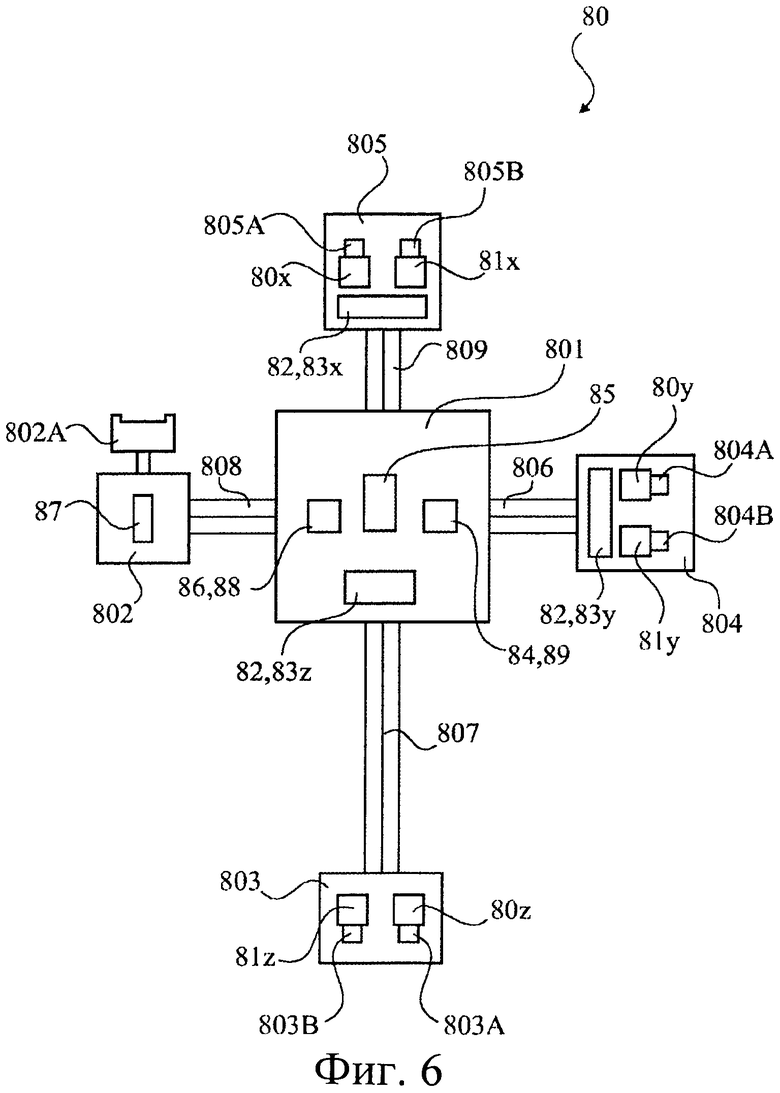
Фиг.6 показывает предпочтительную схему системы датчиков инерциального измерительного модуля в соответствии с изобретением, включая гирометрический датчик 80 и узел акселерометра 81. Узлом здесь называется гибко-жесткая плата, содержащая полужесткую подложку 801-809, включающую цепи, на которых закреплены необходимые элементы. Эта плата содержит центральную прямоугольную часть 801, оборудованную процессором 85 цифровых сигналов и фильтром 82, аналого-цифровым преобразователем 83 и тактовыми генераторами 84, 89. Перпендикулярно каждой стороне из центральной части выступают гибкие ножки 806-809. Первая ножка 808 несет на своем конце часть 802 подложки, которая содержит преобразователь 87 постоянного тока и контакт 802А для подключения инерциального измерительного модуля 80 к системе 6 управления. Вторая ножка 806, третья ножка 807 и четвертая ножка 809 несут на своих концах части 803-805 подложки, которые содержат гироскопический датчик 80х, 80у, 80z и датчик акселерометра 81х, 81у, 81z соответственно, прикрепленные к ним, а также два температурных датчика для каждого из них: 805А, 805В; 804А, 804В; 803А, 803В (в некоторых приложениях один расположенный в центре датчик может быть достаточен, как показано на фиг.4). Таким образом, узел гибко-жесткой платы полностью оборудован, чтобы обеспечить процессор 85 цифровых сигналов цифровыми сигналами для их обработки, например фильтрации, температурной коррекции и т.д., с целью предоставить блоку 6 управления точную цифровую информацию. Чтобы предоставлять такую информацию, предусмотрены различные варианты расположения некоторых частей. Фиг.6 показывает, что в каждой части 804, 805 подложки присутствует один фильтр 82 и аналого-цифровой преобразователь 83 для каждого из Х- и Y-датчиков, в то время как элементы 82, 83z для Z-датчиков 80z, 81z расположены в центральной части 801. Следовательно, расположение на плате различных частей не оказывает влияния на их функцию и потому может быть выбрано исходя из практических соображений, например с учетом пространственных требований и/или производственных аспектов.
Благодаря использованию гибко-жесткой платы все датчики 80x,y,z, 81x,y,z могут быть первоначально откалиброваны по смещению и масштабирующему множителю и, возможно, также по линейности, одновременно, поскольку в показанной плоской форме корпуса они все лежат в одной плоскости. Следовательно, с помощью поворотного устройства (которое вращается в горизонтальной плоскости, предоставляя возможность проверки вращения и опрокидывания), могут быть легко установлены константы калибровки k, например показатели коррекции смещения и масштабирующего множителя и, возможно, также линейности, при различных температурах, которые будут сохранены в устройстве памяти 856 в процессоре 85 цифровых сигналов для использования при выполнении вышеупомянутой коррекции в системе, чтобы обеспечить высокую точность. После того как калибровка будет завершена для выбранных параметров/показателей, гибко-жесткой плате 80 придают намеченную форму (см. фиг.7) для дальнейшей калибровки с целью коррекции положения осей и, возможно, также линейности. После этого модуль готов к применению.
Для коррекции линейности предпочтительно использовать следующий полином:
kn·(данные_датчика)n+…+k2·(данные_датчика)2+k1·данные_датчика+k0.
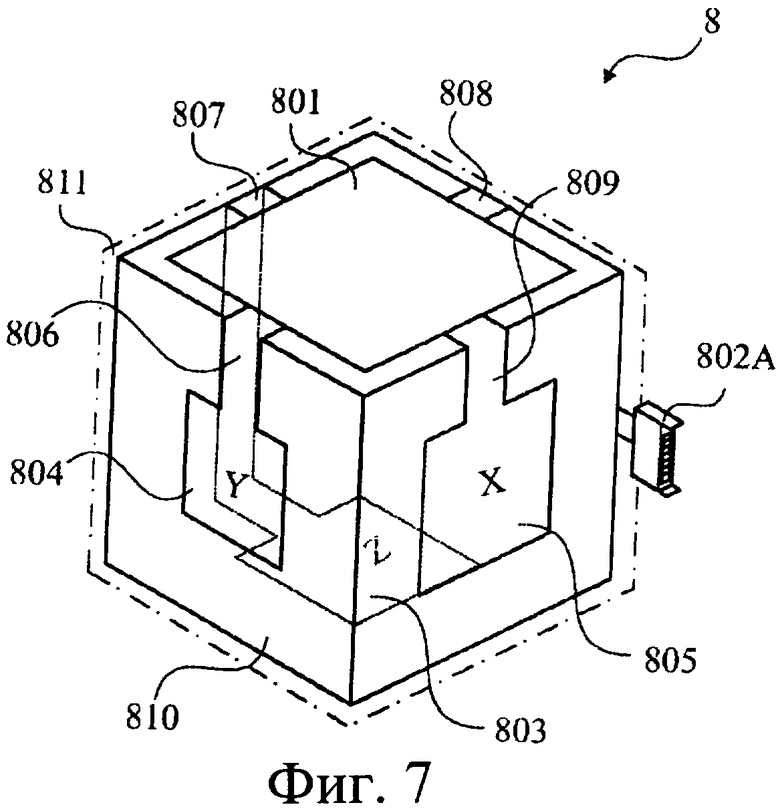
Фиг.7 показывает предпочтительную физическую реализацию инерциального измерительного модуля 8, согласно изобретению, в которой гибко-жесткая плата с фиг.6 (показаны не все детали) обернута вокруг/закреплена на прямоугольном параллелепипеде, предпочтительно кубе 810. Куб может быть выполнен из различных материалов, но предпочтительно из полимеров, например термопластика (например, полиамида или полипропилена), который удовлетворяет основным требованиям (износостойкость, постоянство размеров и т.д.) и имеет низкую стоимость производства (например, с использованием литья под давлением). Как показано на фиг.7, различные части 803, 804, 805 подложки закреплены параллельно каждой стороне куба 810 путем изгиба каждой соответствующей гибкой ножки 806, 807 и 809. Заметим, что гибкая ножка 807 для Z-датчиков 80z и 81z выполнена более чем в два раза длиннее других гибких ножек 806 и 809 (несущих часть 805 подложки для оси X и часть 804 подложки для оси Y соответственно), чтобы можно было обогнуть одну сторону куба 810 и разместить часть 803 подложки на нижней стороне куба 810. Таким образом, все части 803, 804, 805 подложки, несущие калиброванные датчики акселерометра 84 и гирометра 80, расположены точно перпендикулярно относительно друг друга и обеспечивают точное измерение во всех направлениях. Кроме того, фиг.7 показывает, что модуль 801-805, 810 предпочтительно герметизирован/защищен внешней защитной оболочкой 811, например резиной, воском или пластиком и т.д., а наружу выступает лишь контакт 802А. Чтобы достичь высокой точности, куб не должен быть слишком маленьким, предпочтительно его сторона имеет длину по меньшей мере 15 мм, и более предпочтительно - в пределах 20-50 мм.
Изобретение не ограничено описанной выше реализацией и может быть изменено в объеме зависимых пунктов формулы. Например, для специалиста в этой области очевидно, что различные виды микроэлектромеханических модулей могут требовать различных наборов коррекций, и что в действительности без некоторых из показанных коррекций можно обойтись без большой потери точности. Далее, очевидно, что в некоторых установках для всех датчиков 80, 81 может быть достаточно одного температурного датчика, например, если корпус 110 отличается достаточно высокой теплопроводностью, а внешняя оболочка 811 имеет низкую теплопроводность.
Изобретение относится к области приборостроения и может найти применение в системах навигации подвижных объектов управления. Технический результат - расширение функциональных возможностей. Для достижения данного результата система управления содержит центральный блок управления и систему датчиков, размещенных в транспортном средстве с возможностью изменения их температуры. Система датчиков содержит инерциальный измерительный модуль, снабженный микроэлектромеханическим акселерометром и микроэлектромеханическим гирометром. При этом инерциальный измерительный модуль выполнен с возможностью обеспечивать центральный блок управления цифровой информацией, относящейся к поведению транспортного средства. Процессор цифровых сигналов обеспечивает возможность активизации и/или деактивизации, по меньшей мере, одной электронной системы транспортного средства и способен обрабатывать данные, относящиеся к каждому из упомянутых датчиков. Эти новые функции процессора позволяют передавать в центральный блок управления скорректированную - точную цифровую информацию о состоянии подвижного объекта. 2 н. и 18 з.п. ф-лы, 7 ил.
1. Система управления для транспортного средства, содержащая центральный блок (6) управления и систему датчиков (4А, 4В, 8, 9, 10, 11, 13), размещенных в транспортном средстве (1) с возможностью изменения температуры системы датчиков, упомянутая система датчиков содержит инерциальный измерительный модуль (8), снабженный микроэлектромеханическим акселерометром (81) и микроэлектромеханическим гирометром (80), формирующими сигналы (82, 83), при этом упомянутый инерциальный измерительный модуль (8) выполнен с возможностью обеспечивать упомянутый центральный блок (6) управления цифровой информацией, относящейся к поведению упомянутого транспортного средства (1), с помощью процессора (85) цифровых сигналов, чтобы обеспечить возможность активизации и/или деактивизации по меньшей мере одной электронной системы (61, 62, 63, 64, 65) упомянутого транспортного средства (1), отличающаяся тем, что упомянутый процессор (85) цифровых отсчетов способен обрабатывать предварительно сохраненные данные (850, 851, 852, 853, 854, 855, 856, 857), относящиеся к каждому из упомянутых датчиков (80, 81) и устройству приема входных данных, и корректировать упомянутую цифровую информацию перед интегрированием, тем самым, передавая в упомянутый центральный блок (6) управления откорректированную точную цифровую информацию.
2. Система управления по п.1, отличающаяся тем, что упомянутый инерциальный измерительный модуль (8) расположен, по существу, по центру упомянутого транспортного средства.
3. Система управления по п.1 или 2, отличающаяся тем, что упомянутое устройство приема входных данных включает устройство (856) памяти для хранения выбранных входных данных, которые предпочтительно непрерывно обновляют.
4. Система управления по п.3, отличающаяся тем, что упомянутые выбранные входные данные включают любые или все из следующих: 1) температура, 2) влажность, 3) атмосферное давление.
5. Система управления по п.4, отличающаяся тем, что упомянутый процессор (85) цифровых сигналов (DSP) имеет предварительно сохраненные данные в упомянутом устройстве (56)памяти для коррекции смещения и/или масштабирующего множителя в зависимости от температуры.
6. Система управления по п.1 или 2, отличающаяся тем, что упомянутый микроэлектромеханический датчик (80, 81) имеет стабильность смещения менее 100 градусов/час.
7. Система управления по п.1, отличающаяся тем, что упомянутый инерциальный измерительный модуль (IMU) включает высокоскоростной интерфейс (88), работающий с частотой выше 600 Гц, предпочтительно в диапазоне 1-10 кГц.
8. Система управления по п.7, отличающаяся тем, что упомянутый инерциальный измерительный модуль включает канал (86) нормальной обработки и канал (88) высокоскоростной обработки.
9. Система управления по п.1 или 2, отличающаяся тем, что она выполнена с возможностью передачи меньшего объема информации из упомянутого инерциального измерительного модуля (8) в центральный модуль (6) во время обработки столкновения.
10. Система управления по п.8, отличающаяся тем, что высокоскоростной канал использует меньший объем обработки сигналов, чем канал нормальной обработки.
11. Система управления по п.1 или 2, отличающаяся тем, что упомянутая электронная система (6) управляет активизацией, по меньшей мере, одной подушки (7) безопасности, а предпочтительно - активизацией набора подушек (7) безопасности для активизации оптимального набора подушек безопасности в адаптированной к конкретной ситуации последовательности активизации, с использованием, по меньшей мере, в некоторой степени, упомянутой цифровой информации от упомянутого инерциального измерительного модуля (8).
12. Система управления по п.1 или 2, отличающаяся тем, что упомянутая электронная система относится к навигационной системе (65), предназначенной для снабжения водителя точной информацией относительно навигации транспортного средства, при этом, предпочтительно, упомянутый центральный блок (6) управления получает входные данные от модуля (9) глобальной навигационной системы, предпочтительно системы GPS, а входные данные от инерциального измерительного модуля (8) используются при потере входных данных от модуля (9) глобальной навигационной системы.
13. Система управления по п.1 или 2, отличающаяся тем, что упомянутая электронная система относится к динамической системе (63) управления транспортным средством, в которой входные данные от упомянутого инерциального измерительного модуля (8) используются для достижения безопасного управления транспортным средством.
14. Система управления по п.1 или 2, отличающаяся тем, что упомянутый микроэлектромеханический гирометр (80) выполнен в виде гибко-жесткой платы (801-809).
15. Система управления по п.14, отличающаяся тем, что упомянутый микроэлектромеханический акселерометр (81) также размещен на упомянутой гибко-жесткой плате (801-809), и предпочтительно имеется один температурный датчик (803-805А, 803-805В) для каждого из упомянутых датчиков (80x, 80y, 80z, 81x, 81y, 81z).
16. Система управления по п.14, отличающаяся тем, что упомянутая гибко-жесткая плата неподвижно размещена вокруг тела (810) в форме прямоугольного параллелепипеда.
17. Способ управления подсистемой транспортного средства, включающий снабжение транспортного средства центральным блоком (6) управления и системой датчиков (4А, 4В, 8, 9, 10, 11, 13), адаптируемой к температуре окружающей среды, при этом упомянутая система датчиков включает инерциальный измерительный модуль (8), снабженный микроэлектромеханическим акселерометром (81) и микроэлектромеханическим гирометром (80), формирующими сигналы (82, 83), упомянутый инерциальный измерительный модуль выполнен с возможностью обеспечения упомянутых центральных блоков (6) управления цифровой информацией, относящейся к поведению упомянутого транспортного средства (1), с помощью процессора (85) цифровых сигналов, чтобы обеспечить возможность активизации и/или деактивизации, по меньшей мере, одной электронной подсистемы (61, 62, 63, 64, 65) упомянутого транспортного средства (1), отличающийся тем, что упомянутый процессор (85) цифровых отсчетов имеет способность обрабатывать предварительно сохраненные данные (850, 851, 852, 853, 854, 855), относящиеся к каждому из упомянутых датчиков (80, 81) и приемному устройству ввода данных, и выполнен с возможностью корректировать упомянутую цифровую информацию перед интегрированием и тем самым передавать в упомянутый центральный блок (6) управления откорректированную точную цифровую информацию.
18. Способ по п.17, отличающийся тем, что упомянутый микроэлектромеханический гирометр (8) выполняют в виде гибко-жесткой платы (801-809).
19. Способ по п.18, отличающийся тем, что упомянутый акселерометр (81) размещают на той же самой гибко-жесткой плате (801-809).
20. Способ по одному из пп.17-19, отличающийся тем, что, по меньшей мере, один из упомянутых датчиков (80, 81), имеющих три различных оси (80x, 80y, 80z, 81x, 81y, 81z), калибруют одновременно путем вращения в одной и той же плоскости, предпочтительно в горизонтальной плоскости, при этом предпочтительно оба датчика (80, 81) калибруют одновременно.
| US 6516283 A1, 05.12.2002 | |||
| US 2002021245 A1, 21.02.2002 | |||
| WO 2004001337 A1, 31.12.2003 | |||
| Приспособление для настройки и установки резца в резцедержатель станка | 1978 |
|
SU709257A1 |

