Настоящее изобретение относится к медицинской технике, а именно к разработке способа позиционирования хирургических инструментов на основе инерциальных микроэлектромеханических (МЭМС) датчиков, а именно к средствам позиционирования, ориентирования и отслеживания перемещения гибких хирургических инструментов.
Данная задача решается за счет того, хирургические инструменты позиционируются с помощью различных методов, таких как электромагнитные системы позиционирования, вычислительная геометрия и векторная алгебра, и система инерциального позиционирования. В методике электромагнитных систем позиционирования используются приемники и передатчики напряженности магнитного поля, которые воздействуют на металлические хирургические инструменты, что, в результате, приводит к ошибкам в определении положения хирургического инструмента. В методике вычислительной геометрии и векторной алгебры используется дополнительный математический метод триангуляции, который использует систему оптической локализации, маркеры и опорные точки.
Известен способ определения положения и ориентации перемещающегося объекта с использованием магнитного поля, где применяются дипольные передающие антенны, генерирующие либо переменные, либо импульсные магнитные поля, измеряемые закрепленными на объекте датчиками, причем показания датчиков затем используются для вычисления ориентации, определяемой в общем случае тремя угловыми координатами (азимут, угол места и крена), и тремя линейными координатами объекта [1].
Однако при наличии вблизи источника магнитного поля электропроводящих материалов точность таких систем в значительной степени подвержена влиянию вторичных магнитных полей, генерируемых наводимыми вихревыми токами, при этом величина и распределение поля существенно искажаются в случае присутствия вблизи рабочей области материалов с высокой магнитной проницаемостью. Поэтому предварительно осуществляют магнитное картографирование области перемещения объекта, что заключается в измерении значений компонент магнитного поля с построением карты магнитного поля помех в области перемещения объекта. и в основном применяется в авиационной технике, следящих и охранных системах и мультимедийных компьютерных технологиях. немножко
В данном способе используются много вычислительных блоков, таких как источник рабочего поля (ИРП) с устройством управления, соединенным с бортовым компьютером летательного аппарата, приемник, содержащий девять однокомпонентных дифференциальных датчиков, устройство в виде печатной платы с микроконтроллером для передачи показаний датчиков на компьютер и трехкомпонентный датчик поля Земли, располагаемый на удалении от ИРП. С точки зрения себестоимости и сложности схемотехнических решений (технических решений) использование этой методики становится затруднительным. Кроме того, область перемещения подвижного объекта в пространстве ограничена, причем его отдаление от рабочей области приводит к снижению точности измерений. Однако нет возможности прикреплять данный датчик на конструкцию хирургического инструмента, так как имеет большие по сравнению с местом крепления размеры, вследствие того, что приемник содержит девять однокомпонентных дифференциальных датчиков и устройство в виде печатной платы с микроконтроллером для передачи показаний датчиков.
Известен способ определения ориентации объекта с помощью инерциального измерительного модуля, который вычисляет корректирующие сигналы позиционной коррекции и решает кинематические уравнения для вычисления оценок углов ориентации, к корректирующим сигналам позиционной коррекции добавляют перекрестные сигналы коррекции в каждом канале, коэффициенты которых задаются исходя из необходимых динамических свойств системы, целью которого является повышение точности автономного определения параметров ориентации подвижных объектов. Инерциальный измерительный модуль состоит из трехосного блока магнитометров, трехосного блока акселерометров и трехосного блока гироскопов [2].
Данный способ позволяет повысить точность решения задачи автономной ориентации подвижных объектов за счет асимптотической устойчивости системы по всем трем углам ориентации, возможности настройки системы на период Шулера для компенсации баллистических погрешностей без введения интегральной коррекции, возможности настройки системы как фильтр нижних частот по всем входам и выходам.
Недостатком данного способа является обширная область использования; относится к приборостроению, именно к области приборов и систем ориентации, и может быть применен в системах управления подвижными объектами. Предлагаемый способ относится только к области медицинской техники, а именно для определения и слежения гибкого хирургического инструмента в пространстве; кроме того, описаны назначение, подключение, принцип и состав каждого блока, а также расположение МЭМС датчиков вдоль хирургического инструмента.
Кроме того, другим недостатком данного способа является автономная ориентация и навигация подвижных объектов в условиях отсутствия возможности применения спутниковых навигационных систем, возможное использование в авиационной, морской и наземной техниках. Однако предлагаемый способ относится к области медицинской техники, поскольку медучреждения находятся в зоне спутниковых навигационных систем, кроме тех случаев, когда возможно по специальному назначению находиться на наземных или морских площадках.
Наиболее близким к заявленному техническому решению является способ автономной ориентации подвижного объекта с помощью инерциального измерительного модуля.
Из изученной научно-технической и патентной информации не известен способ определения ориентации и положения гибкого хирургического инструмента в трехмерном пространстве с указанными в формуле изобретения отличительными признаками. Это дает основание сделать вывод о соответствии заявляемого способа критериям изобретения.
Задачей, на решение которой направлено заявляемое изобретение, является упростить работу врача-хирурга и избежать нанесения повреждений пациенту.
Технический результат – определение и отслеживание положения гибкого хирургического инструмента в трехмерном пространстве на основе инерциальных МЭМС датчиков в режиме реального времени.
Технический результат достигается тем, что способ трекинга гибкого хирургического инструмента, включающий использование составного модуля, реализованного в виде единой цифровой МЭМС микросхемы, включающей трехосевой магнитометр, трехосевой гироскоп и трехосевой акселерометр, согласно изобретению инерциальные МЭМС датчики в виде отдельной цифровой МЭМС микросхемы, которые располагают вдоль хирургического инструмента, после чего фиксируют определённую координату хирургического инструмента в пространстве и определяют его положение в каждой точке; причем количество МЭМС датчиков зависит от длины хирургического инструмента, а расстояние между двумя из них определяется требуемой точностью позиционирования элементов инструмента и составляет от 2 до 10 мм, в микроконтроллер по шинам питания и данных передаются зафиксированные МЭМС датчиками значения, которые затем принимаются в блоке передачи данных; в качестве блока передачи данных можно использовать проводной и беспроводной виды соединений, после чего через шины питания и данных полученные значения передаются к вычислительному модулю; в вычислительном модуле осуществляется обработка данных, затем через интерфейс передачи информации передаются в персональный компьютер, и на платформе разработки 3D-приложений в реальном времени отрисовывается положение хирургического инструмента в трехмерном пространстве и отображается на мониторе персонального компьютера; с помощью источника питания обеспечивается подача электрической энергии вычислительному модулю, блоку передачи данных и микроконтроллеру; в микроконтроллере, модуле для беспроводной передачи и приема данных и вычислительном модуле по назначению прошивается программное обеспечение.
Сущность изобретения поясняется чертежами, на которых изображено:
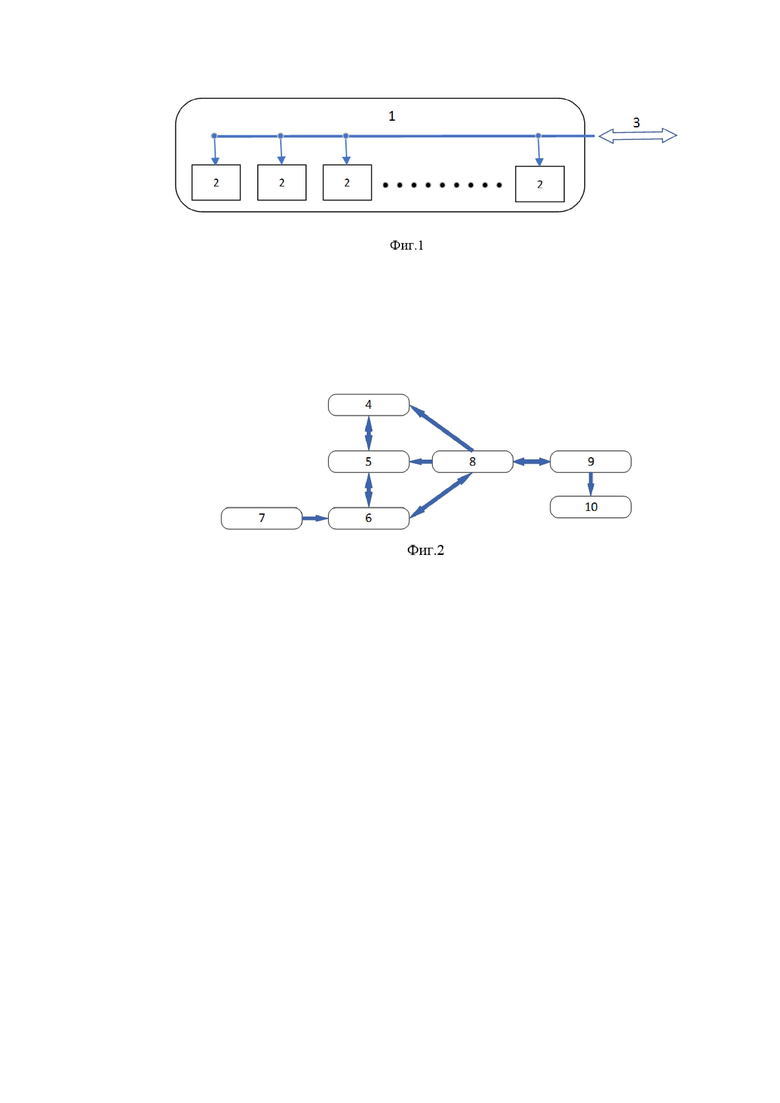
на фиг.1 изображен блок хирургического инструмента с МЭМС датчиками, на фиг.2 изображен вычислительный блок.
Предлагаемое устройство, состоящее из блока хирургического инструмента с МЭМС датчиками (трехосевой акселерометр, трехосевой гироскоп и трехосевой магнетометр) (фиг.1) включает в себя гибкий хирургический инструмент 1, МЭМС датчики 2, шины питания и данных 3. Вычислительный блок (фиг.2) включает в себя микроконтроллер 4, блок передачи данных 5, вычислительного модуля 6, источника питания 7, программного обеспечения 8, персонального компьютера с программным обеспечением для 3D-моделирования 9 и дисплея 10.
На фиг.1 приведено расположение МЭМС датчиков 2 в гибком хирургическом инструменте 1. МЭМС датчики располагаются вдоль хирургического инструмента 1, количество МЭМС датчиков зависит от типа хирургического инструмента. С точки зрения сложности схемотехнического решения, влияния внешних шумов, соотношения массогабаритных показателей и себестоимости наиболее лучшим вариантом является использование составного модуля, реализованного в виде единой цифровой МЭМС микросхемы, включающей трехосевой магнитометр, трехосевой гироскоп и трехосевой акселерометр. Несмотря на то, что по строению хирургические инструменты бывают гибкие и жесткие, датчики можно использовать в обоих случаях. Расстояние между двумя составным модулями определяется требуемой точностью позиционирования элементов инструмента и составляет от 2 до 10 мм. Шины питания и данных 3 соединяют МЭМС датчики с внешней средой. На фиг.2 приведен вычислительный блок, который проводит дальнейшую обработку получаемого значения с блока хирургического инструмента с МЭМС датчиками (фиг.1). Блок хирургического инструмента с МЭМС датчиками через шины питания и данных 3 подключаются к микроконтроллеру 4. Микроконтроллер 4 принимает зафиксированные МЭМС датчиками значения и передает их в блок передачи данных 5. В качестве блока передачи данных можно использовать проводной и беспроводной виды соединений. В случае применения проводного соединения через шины питания и данных полученные значения передаются к вычислительному модулю 6. В случае применения беспроводного соединения можно использовать модуль для беспроводной передачи и приема данных, который представляет из себя ведущий - передатчик и ведомый - приемник. Ведущий - передатчик подключается к микроконтроллеру, а ведомый - приемник подключается к вычислительному модулю. Данные от ведущего – передатчика передаются к ведомому - приемника, и после чего их принимает вычислительный модуль. В вычислительном модуле осуществляется обработка данных, затем через интерфейс передачи информации передаются в персональный компьютер 9. На платформе разработки 3D-приложений в реальном времени отрисовывается положение хирургического инструмента в трехмерном пространстве и отображается на мониторе персонального компьютера 11. С помощью источника питания 7 обеспечивается подача электрической энергии вычислительному модулю, блоку передачи данных и микроконтроллеру. В микроконтроллере 4, модуле для беспроводной передачи и приема данных и вычислительном модуле 6 по назначению прошивается программное обеспечение 8.
Устройство работает следующим образом: вдоль хирургического инструмента 1 будут располагаться (прикрепляться) чувствительные элементы микроэлектромеханических систем (МЭМС) 2. Каждый датчик фиксирует определённую координату хирургического инструмента в пространстве. По полученным значениям в режиме реального времени составляется трехмерное изображение гибкого хирургического инструмента в пространстве и определяется его положение в каждой точке.
Приведенная совокупность признаков, обеспечивает создание системы инерциального позиционирования и слежения хирургических инструментов на основе МЭМС датчиков в режиме реального времени.
Литература
1. Патент РФ № 2241958. МПК G01C21/00. СПОСОБ (ВАРИАНТЫ) И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ И ОРИЕНТАЦИИ ПОДВИЖНОГО ОБЪЕКТА/ Амосков В.М. Заявл.02.12.2003. Опубл. 10.12.2004. Бюл. № 34. – 20 с.
2. Патент РФ № 2738342. МПК G01M7/00. Способ автономной ориентации подвижного объекта с помощью инерциального измерительного модуля/ Амосков В.М. Заявл.30.12.2019. Опубл. 11.12.2020. Бюл. № 35. – 15 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И СИСТЕМА ДЛЯ ВЕДЕНИЯ ДИАЛОГОВ С ВИРТУАЛЬНЫМИ ПЕРСОНАЖАМИ В ВИРТУАЛЬНОЙ СРЕДЕ | 2020 |
|
RU2747861C1 |
| Устройство регистрации двигательной активности | 2016 |
|
RU2663396C2 |
| ИНЕРЦИАЛЬНОЕ УСТРОЙСТВО И СПОСОБЫ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ЭЛЕКТРОННЫМИ СИСТЕМАМИ | 2015 |
|
RU2648938C2 |
| МНОГОФУНКЦИОНАЛЬНОЕ БЕСПРОВОДНОЕ УСТРОЙСТВО СО СМЕННЫМИ ХИРУРГИЧЕСКИМИ ИНСТРУМЕНТАМИ ДЛЯ ИЗМЕРЕНИЯ ИХ УГЛОВ ОРИЕНТАЦИИ В ПРОСТРАНСТВЕ И ВОЗДЕЙСТВУЮЩИХ НА НИХ СИЛ И МОМЕНТОВ ПРИ ПРОВЕДЕНИИ НЕЙРОХИРУРГИЧЕСКИХ ОПЕРАЦИЙ | 2022 |
|
RU2807937C1 |
| БЛОК БЕСПЛАТФОРМЕННОЙ СИСТЕМЫ ОРИЕНТАЦИИ И ВКЛЮЧАЮЩАЯ ЕГО СИСТЕМА ВИЗУАЛИЗАЦИИ И РЕГИСТРАЦИИ ДВИЖЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2007 |
|
RU2336496C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ОБЪЕКТА В ПРОСТРАНСТВЕ | 2016 |
|
RU2626755C1 |
| Комплект носимой аппаратуры топогеодезической привязки и формирования целеуказаний | 2017 |
|
RU2661676C1 |
| Способ измерения величины тортиколлиса у пациентов с косоглазием | 2023 |
|
RU2830641C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВИБРОСКОРОСТИ И ДАТЧИК ВИБРОСКОРОСТИ | 2021 |
|
RU2780303C1 |
| СПОСОБ И СИСТЕМА ДЛЯ ОПТИКО-ИНЕРЦИАЛЬНОГО ТРЕКИНГА ПОДВИЖНОГО ОБЪЕКТА | 2017 |
|
RU2758036C1 |
Настоящее изобретение относится к медицинской технике, а именно к разработке позиционирования хирургических инструментов на основе инерциальных микроэлектромеханических (МЭМС) датчиков, а именно к средствам позиционирования, ориентирования и отслеживания хирургических инструментов. Техническим результатом является создание системы инерциального позиционирования и отслеживания хирургических инструментов на основе МЭМС датчиков в режиме реального времени. Заявленный способ реализует использование блока хирургического инструмента с МЭМС датчиками и вычислительного блока. Блок хирургического инструмента с МЭМС датчиками включает в себя гибкий хирургический инструмент 1, МЭМС датчики 2, шины питания и данных 3. Вычислительный блок включает в себя микроконтроллер 4, блок передачи данных 5, вычислительного модуля 6, источника питания 7, программного обеспечения 8, персонального компьютера с программным обеспечением для 3D-моделирования 9 и дисплея 10. 2 ил.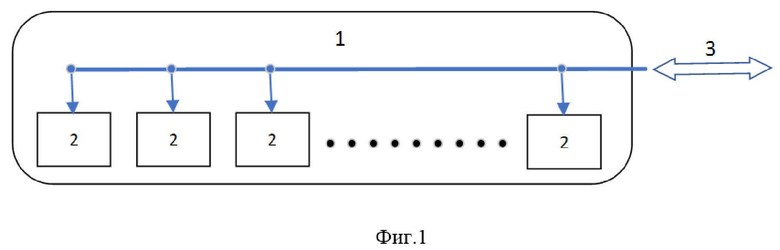
Способ трекинга гибкого хирургического инструмента, включающий использование составного модуля, реализованного в виде единой цифровой МЭМС микросхемы, включающей трехосевой магнитометр, трехосевой гироскоп и трехосевой акселерометр, отличающийся тем, что инерциальные МЭМС датчики в виде отдельной цифровой МЭМС микросхемы, которые располагают вдоль хирургического инструмента, после чего фиксируют определённую координату хирургического инструмента в пространстве и определяют его положение в каждой точке; причем количество МЭМС датчиков зависит от длины хирургического инструмента, а расстояние между двумя из них определяется требуемой точностью позиционирования элементов инструмента и составляет от 2 до 10 мм, в микроконтроллер по шинам питания и данных передаются зафиксированные МЭМС датчиками значения, которые затем принимаются в блоке передачи данных; блок передачи данных использует проводной и беспроводной виды соединений, после чего через шины питания и данных полученные значения передаются к вычислительному модулю; в вычислительном модуле осуществляется обработка данных, затем через интерфейс передачи информации передаются в персональный компьютер,и на платформе разработки 3D-приложений в реальном времени отрисовывается положение хирургического инструмента в трехмерном пространстве и отображается на мониторе персонального компьютера; с помощью источника питания обеспечивается подача электрической энергии вычислительному модулю, блоку передачи данных и микроконтроллеру; в микроконтроллере, модуле для беспроводной передачи и приема данных и вычислительном модуле по назначению прошивается программное обеспечение.
| Станок для придания концам круглых радиаторных трубок шестигранного сечения | 1924 |
|
SU2019A1 |
| Способ получения цианистых соединений | 1924 |
|
SU2018A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ОБЪЕКТА В ПРОСТРАНСТВЕ | 2016 |
|
RU2626755C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ РОБОТИЗИРОВАННОГО БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА В АВТОНОМНОМ РЕЖИМЕ | 2020 |
|
RU2733453C1 |
| Машина для синтеза контактных схем | 1958 |
|
SU121947A2 |

