Область техники
Настоящее изобретение относится к способу регулирования электродвигателя при помощи микропроцессора, регулирующего электропитание для упомянутого двигателя. В частности, изобретение относится к способу регулирования механически коммутируемого электродвигателя, такого как двигатель постоянного тока или универсальный двигатель, и также к регулируемому микропроцессором электропитанию постоянного тока.
Предшествующий уровень техники
Механически коммутируемые электродвигатели, т.е. двигатели, в которых узел щетки и коммутатора изменяет полярность тока в якорных обмотках во время вращения якоря в создаваемых статором магнитных полях, хорошо известны из уровня техники. Магнитные поля в этих двигателях могут создаваться постоянными магнитами или электромагнитами. Если магнитное поле создается электромагнитами, то ток в обмотках, создающих магнитное поле статора, можно обеспечить отдельным намагничивающим током, либо его можно обеспечить тем же током, который проходит по обмоткам якоря. Эти двигатели обычно называют универсальными двигателями, поскольку они целесообразны для переменного тока, если частота переменного тока не слишком высокая. Этот универсальный двигатель хорошо работает с такими наиболее часто используемыми частотами переменного тока, как 16 2/3 Гц, 50 Гц или 60 Гц.
Механически коммутируемый электродвигатель постоянного тока с постоянными магнитами является наиболее часто применяемым двигателем для малых и средних электрических и электронных устройств. Поэтому эти двигатели изготавливают в очень больших количествах, при этом они очень недорогие.
Электродвигатели, регулируемые с помощью ШИМ или путем импульсного преобразования, хорошо известны из уровня техники и используются в разных электроприводах, содержащих один или несколько механически коммутируемых двигателей постоянного тока. Типичные устройства, к которым относится изобретение, включают в себя приводы для подъема и снижения таких регулируемых по высоте элементов мебели, как столешницы, стулья и другая несущая нагрузку мебель для бытового, конторского или медицинского использования, для управления движением робототехнических устройств и др.
В этих устройствах желательно использовать несколько двигателей, например два двигателя, по одному на каждом конце столешницы. Если используются два двигателя, то они часто подвергаются разным нагрузкам, и поэтому их действие должно быть синхронизировано, чтобы поддерживать столешницу на одном уровне.
Краткое изложение существа изобретения
Задачей настоящего изобретения является создание способа регулирования механически коммутируемого электродвигателя, в частности способа обеспечения синхронной работы первого и второго электродвигателей.
Согласно первому аспекту настоящего изобретения предложен способ регулирования механически коммутируемого электродвигателя, причем угол поворота якоря электродвигателя определяют при изменении противоэдс во время коммутации электродвигателя, а электропитание электродвигателя прекращают после заданного числа обнаруживаемых коммутаций.
Было определено, что обнаружение и прекращение, в необходимых случаях, общего электроснабжения двигателя позволяет обычному механически коммутируемому электродвигателю работать как шаговому двигателю. Это главное преимущество, т.к. эти обычные механически коммутируемые электродвигатели гораздо дешевле шагового двигателя.
В соответствии с предпочтительным вариантом осуществления изобретения упомянутое число обнаруживаемых коммутаций равно единице. Поэтому электродвигатель может работать в дискретном пошаговом режиме как шаговый двигатель, с числом шагов, соответствующих числу коммутаций, приходящихся на один оборот.
В соответствии с еще одним предпочтительным вариантом осуществления изобретения изменение противоэдс определяют путем измерения напряжения в индукторе и/или резисторе, подключенном последовательно к двигателю на линии его электропитания. Благодаря этому определение осуществляют непосредственно в одной из линий электропитания двигателя, что позволяет определять угол поворота путем измерения, выполняемого непосредственно в линии электропитания для двигателей. Благодаря этой технической характеристике устраняется необходимость применения дополнительных тахометров или кодеров, а также применения для них отдельных линий.
Согласно еще одному варианту осуществления изобретения механически коммутируемый электродвигатель является универсальным двигателем или двигателем с последовательным возбуждением, содержащим по меньшей мере одну катушку обмотки возбуждения, причем указанная по меньшей мере одна катушка обмотки возбуждения содержит индуктор для измерения напряжения. Применение катушки обмотки возбуждения устраняет необходимость в использовании дополнительных индукторов в цепи питания и устраняет необходимость в дополнительных схемах.
Согласно предпочтительному варианту осуществления изобретения механически коммутируемый электродвигатель регулируется путем широтно-импульсной модуляции с использованием микропроцессора. Это позволяет регулировать величину подаваемого тока, позволяя останавливать двигатель при обнаружении нужного числа коммутаций.
Согласно еще одному предпочтительному варианту осуществления изобретения при обнаружении коммутации, когда заданное число коммутаций еще не достигнуто, величину подаваемого тока во время коммутации уменьшают. Это позволяет уменьшить частоту образования электрической дуги, возникающей во время коммутации, благодаря чему снижается износ электродвигателя и также уменьшается выделение коррозионных газов.
Согласно еще одному предпочтительному варианту осуществления изобретения способ предназначен для регулирования первого механически коммутируемого электродвигателя и по меньшей мере одного дополнительного механически коммутируемого электродвигателя при помощи микропроцессора, который регулирует электропитание для первого электродвигателя и дополнительного двигателя. Указанный способ заключается в том, что определяют углы поворота якоря первого двигателя и дополнительного двигателя путем определения изменений противоэдс, когда происходит коммутация упомянутых первого и дополнительного механически коммутируемых электродвигателей, при этом когда один из первого двигателя или дополнительного двигателя достигает заданного угла, отключают подачу тока на этот двигатель и вновь осуществляют подачу тока на первый двигатель или дополнительный двигатель, когда другой двигатель из первого или дополнительного двигателя достигает упомянутого заданного угла.
Согласно этому способу обычные механически коммутируемые электродвигатели могут работать в дискретном пошаговом режиме, когда первый двигатель, достигнув заданного угла поворота, останавливается и ждет второго двигателя. Так, благодаря надлежащим образом подобранным шагам общая работа двигателей осуществляется синхронно.
Согласно второму аспекту изобретения предложенный способ используют для управления работой двигателей при изготовлении мебели.
Краткое описание чертежей
Изобретение далее поясняется более подробно описанием предпочтительного варианта выполнения, который не является ограничительным, со ссылками на сопровождающие чертежи, на которых:
фиг.1 изображает блок-схему последовательности операций предпочтительного варианта осуществления способа согласно изобретению;
фиг.2 - схему электропитания для реализации заявленного способа согласно изобретению.
Описание предпочтительного варианта воплощения изобретения
Основная идея изобретения исходит из того факта, что было обнаружено, что при коммутации обычного механически коммутируемого электродвигателя можно удобным образом измерять изменения противоэдс. Эта возможность особо относится к случаю, когда широтно-импульсно-модулированное электроснабжение используется для механически коммутируемого электродвигателя; причем было обнаружено, что генерируемое противоэдс напряжение удобным образом обнаруживается между широтно-импульсно- модулированными импульсами.
Обнаружение коммутаций по противоэдс в комбинации с регулируемой микропроцессором широтно-импульсной модуляцией электроснабжения позволяет прекращать подачу тока на двигатель, и при этом двигатель эффективно работает как шаговый двигатель с разрешающей способностью, соответствующей максимальному числу коммутаций на один оборот механически коммутируемого электродвигателя.
Хотя обычно это число меньше разрешающей способности шагового двигателя, но тот факт, что механически коммутируемый электродвигатель намного дешевле, делает изобретение привлекательным для случаев, когда желательна или необходима работа в пошаговом режиме, но повышенная разрешающая способность не является обязательной.
Одним из таких случаев является синхронизация двигателей, например, для подъема столешниц при изготовлении мебели т.п.
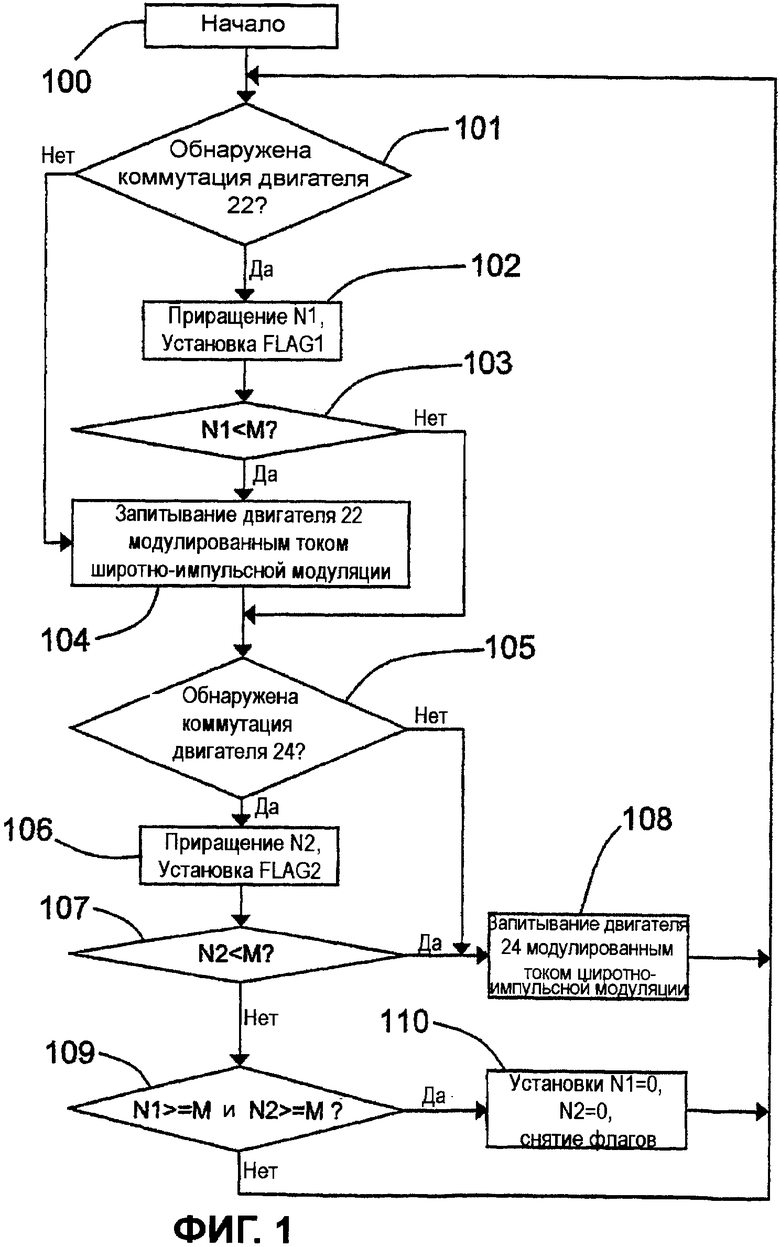
На фиг.1 показана блок-схема последовательности операций предпочтительного варианта осуществления способа согласно изобретению, в котором осуществляют регулирование двух механически коммутируемых электродвигателей 22, 24 постоянного тока при помощи микропроцессора 20 (фиг.2). Специалисту в данной области техники понятно, что альтернативно можно использовать и другие типы механически коммутируемых электродвигателей, например универсальные двигатели или двигатели последовательного возбуждения.
Реализация способа начинается на этапе 100 и переходит к этапу 101. Если на этапе 101 коммутацию двигателя 22 не обнаруживают, то микропроцессор 20 переходит к этапу 104 и выдает по меньшей мере один широтно-импульсно-модулированный импульс тока двигателю 22. Если на этапе 101 коммутацию обнаруживают, то микропроцессор делает приращение счетчика N1 на этапе 102 и устанавливает флаг обнаружения FLAG1. Затем на этапе 103 микропроцессор 20 проверяет, достиг ли счетчик N1 заданного значения М. Если N1 еще не достиг заданного значения М, то микропроцессор 20 переходит к этапу 104 и выдает по меньшей мере один широтно-импульсно-модулированный импульс тока двигателю 22. Если N1 достиг заданного значения М или превысил его, то микропроцессор переходит к этапу 105, чтобы проверить, обнаружена ли коммутация для второго двигателя 24.
По существу, этапы 105-108 соответствуют этапам 101-104. То есть, если на этапе 105 коммутация двигателя 24 не обнаружена, то микропроцессор 20 переходит к этапу 108 и выдает по меньшей мере один широтно-импульсно-модулированный импульс тока двигателю 24. И если на этапе 105 коммутация обнаружена, то микропроцессор на этапе 106 делает приращение счетчика N2 и устанавливает флаг обнаружения FLAG2. Затем на этапе 107 микропроцессор 20 проверяет, достиг ли счетчик N2 заданного значения М. Если N2 еще не достиг заданного значения М, то микропроцессор 20 переходит к этапу 108 и выдает по меньшей мере один широтно-импульсно-модулированный импульс тока двигателю 24, при этом микропроцессор возвращается к этапу 101 и повторяет процесс. Если N2 достиг заданного значения М или превысил его, то микропроцессор переходит к этапу 109, чтобы проверить, достигли ли оба N1 и N2 заданного значения М или превысили его. Если это так, то оба N1 и N2 устанавливают на нулевое значение, флаги FLAG1 и FLAG2 снимаются на этапе 110 и микропроцессор возвращается к этапу 101 для повторения процесса.
Флаги FLAG1 и FLAG2 используются по той причине, что после обнаружения заданного числа коммутаций подача тока двигателю будет остановлена микропроцессором, и в результате непосредственное обнаружение на этапах 101 или 105 не будет разрешено.
Следует отметить, что хотя приводимое выше описание относится к способу управления двумя двигателями, специалисту будет понятно, что регулирование дополнительных двигателей также возможно по тому же принципу, т.е. суммирование соответствующих переменных N3-Nn, и введение флагов FLAG3 и FLAGn, и повторение этапов 101-104 для каждого дополнительного двигателя.
Заданное значение М может зависеть от конкретного использования, когда желательна синхронная работа двух и более двигателей. В частности, М может иметь значение 1, тем самым эффективно превращая каждый из двигателей 22, 24 постоянного тока в шаговый двигатель. Это также относится и к одиночному двигателю, для которого синхронизация не требуется.
Разумеется, способ согласно изобретению обеспечивает работу каждого из двигателей 22, 24 в пошаговом режиме таким образом, что более быстрый из них останавливается после заданного угла и ждет, когда остальные двигатели достигнут этого же заданного угла. Этот угол может соответствовать одной коммутации, но в принципе можно использовать множество коммутаций, например, соответствующее одному или более оборотам двигателя.
В отношении синхронизации следует отметить, что микропроцессор 20 может также регулировать широтно-импульсную модуляцию, чтобы увеличить подаваемый в двигатель ток, если именно этот двигатель постоянно работает медленнее и достигает заданного угла позднее, чем первый двигатель. Альтернативно, очевидно, что можно уменьшить ток, подаваемый в более быстрый двигатель.
Очевидно, что каждый из двигателей 22, 24 можно регулировать его собственным микропроцессором 20. Но предпочтительно использование единого микропроцессора 20 для управления несколькими двигателями 22, 24, т.к. скорость обработки данных микропроцессором 20 будет вполне достаточной для этого.
На фиг.2 показана регулируемая микропроцессором схема электропитания постоянным током для реализации способа согласно изобретению.
Электропитание предпочтительно является питанием постоянным током. Блок питания обеспечивается постоянным током, например, из стабилизированной электросети на положительном выводе 1 и отрицательном выводе 2. Между положительным выводом 1 и отрицательным выводом 2 подключен делитель 3 напряжения. В предпочтительном варианте осуществления делитель 3 напряжения содержит конденсаторы 4, 5 и два резистора 6, 7. Два конденсатора 4, 5 предпочтительно имеют одинаковую электрическую емкость, и два резистора 6, 7 имеют одинаковое сопротивление. На центральном печатном контакте 8 делителя 3 напряжения будет промежуточный потенциал. Промежуточный потенциал обозначен как 0, но очевидно, что промежуточный потенциал колеблется и изменяется в зависимости от тока, отбираемого из делителя 3 напряжения, если он не стабилизирован наружным подключением к фиксированному эталонному потенциалу.
Ток с перерывами отбирается из делителя 3 напряжения трансформатором с первичной обмоткой 9, имеющей первый конец 10 и второй конец 11. Трансформатор имеет две вторичные обмотки 12, 13 с общим выводом 14, и с выводом 15 первого конца, и выводом 16 второго конца. Две вторичные обмотки 12, 13 предпочтительно имеют одинаковое число витков и одинаковое направление. Соотношение первичных витков к вторичным предпочтительно равно 20:4/4 для описываемых здесь применений, но в зависимости от конкретного применения это соотношение, разумеется, может быть другим. Следует отметить, что несмотря на то, что здесь упомянут трансформатор, он не работает как обычный трансформатор переменного тока, а лишь как средство аккумулирования индуктивной энергии.
Для обеспечения возможности прерывистого отбора напряжения трансформатором тока из делителя 3 электропитание постоянным током включает в себя два регулируемых переключателя 18, 19. Первый регулируемый переключатель 18 подключен между первым концом 10 первичной обмотки 9 трансформатора и положительным выводом 1. Второй регулируемый переключатель 19 подключен между первым концом 10 первичной обмотки 9 трансформатора и отрицательным выводом 2. Регулируемые переключатели 18, 19 предпочтительно являются полупроводниковыми переключателями, которыми управляет микропроцессор 20. Если между первичной обмоткой 9 и вторичной обмоткой 12 трансформатора требуется гальваническая развязка, то идущие к регулируемым переключателям 18, 19 линии управления могут содержать оптопары (не показаны).
Оба регулируемых переключателя 18, 19 действуют прерывисто под управлением микропроцессора 20, например, методом широтно-импульсной модуляции, как упомянуто выше.
Микропроцессор 20 исключает одновременную работу регулируемых переключателей 19 и следит за тем, чтобы регулируемые переключатели 18, 19 работали независимо друг от друга.
Когда работает первый регулируемый переключатель, то ток идет с положительного вывода 1 по первичной обмотке 9 к центральному печатному контакту 8 делителя 3 напряжения, создавая поток первого направления в трансформаторе, в результате чего, в свою очередь, генерируется электрический ток во вторичной обмотке. Ток течет в первой вторичной обмотке 12 по первому диоду 21, соединенному с выводом 15 первого конца, в первый двигатель 22 и назад в общий вывод 14. Второй диод 23 предотвращает течение тока во второй вторичной обмотке 13.
Когда работает второй регулируемый переключатель, то ток течет с отрицательного вывода 2 по первичной обмотке 9 к центральному печатному контакту 8 делителя 3 напряжения, создавая поток второго направления в трансформаторе, в результате чего, в свою очередь, генерируется электрический ток во вторичной обмотке. В этом случае ток течет во второй вторичной обмотке 13 через второй диод 23, соединенный с выводом 16 второго конца, во второй двигатель 24 и назад в общий вывод 14. При этом первый диод 21 предотвращает течение тока в первой вторичной обмотке 12.
Поскольку регулируемыми переключателями 18, 19 можно управлять независимо друг от друга, обеспечивается возможность регулирования питания для двух двигателей 22, 24 независимо друг от друга, используя лишь один трансформатор. В частности, при условии надлежащего подбора модуляции и рабочего цикла двумя регулируемыми переключателями 18, 19 можно управлять по очереди, причем первый регулируемый переключатель 18 будет активизирован, при этом второй регулируемый переключатель 19 не будет активным, и наоборот. Но также возможно, чтобы первый регулируемый переключатель 18 выполнял несколько рабочих циклов, и при этом второй регулируемый переключатель 19 не будет активным, и наоборот.
Согласно изобретению электропитание обеспечивает регулирование механически коммутируемых электродвигателей 22 и 24 постоянного тока соответственно.
Поскольку во многих применениях, таких как упомянутые выше столешницы, необходимо изменять направление вращения двигателя на обратное, в линии электропитания для двигателей 22, 24 введены переключатели 25, 26 на два направления для обращения полярности в этих линиях. Переключатели на два направления предпочтительно являются полупроводниковыми переключателями, которыми управляет микропроцессор 20. Микропроцессор 20 предпочтительно выполнен с возможностью управления работой переключателей 25, 26 на два направления в условиях отсутствия тока только для того, чтобы избежать ненужных напряжений. Поэтому не обязательно, чтобы переключатели 25, 26 на два направления обладали способностью отключения нагрузки. Кроме этого, микропроцессор предотвращает состояния переключателей 25, 26 на два направления, в которых вторичные обмотки 12, 13 закорачиваются.
Исходя из требований настоящего изобретения, т.е. регулирования столешниц по высоте с использованием двух двигателей, работа которых должна быть синхронизирована, чтобы выдерживать заданный уровень столешницы, подвергаясь разным нагрузкам, цепь электропитания также содержит два индуктора и/или резисторы 27, 28, расположенные последовательно по отношению к соответствующему либо первому двигателю 22, либо второму двигателю 24. Эти индукторы и/или резисторы 27, 28 служат в качестве средств измерения противоэдс в соответствующих механически коммутируемых электродвигателях 22, 24 постоянного тока. Было обнаружено, что противоэдс двигателей легко определяется, и поэтому ее можно использовать как средство определения углового положения якоря двигателя постоянного тока, при условии, что число коммутаций на один оборот двигателя 22, 24 известно. Коммутации обнаруживают микропроцессором 20 по напряжению, измеряемому на индукторах и/или резисторах 27, 28, с возможным использованием соответствующей цепи (не показана). Следует отметить, что в настоящее время предпочтительно использовать индуктор, а не резистор. Тем не менее, поскольку идеальные индукторы без резистивного компонента, т.е. выполненного из провода, являются более или менее теоретическими, даже использование индуктора обычно включает в себя комбинацию с резистором того или иного вида.
Если один из двигателей подвергается нагрузке, меньшей, чем нагрузка другого двигателя, и поэтому вращается быстрее, тогда микропроцессор 20 остановит подачу электропитания на этот двигатель с каждой коммутацией или после заданного числа коммутаций. Микропроцессор 20 будет ждать коммутацию другого двигателя, а затем снова будет запитывать первый двигатель. Таким образом, для коммутации первого двигателя его можно просто оставить, дождаться коммутации другого двигателя, при этом первый двигатель 22 и второй двигатель 24 будут эффективно работать синхронно в отношении общего угла вращения.
Как упомянуто выше, этапы 105-108 способа, по существу, соответствуют этапам 101-104. Поэтому специалисту в данной области техники будет ясно, что определение коммутации путем обнаружения изменения противоэдс не ограничивается работой двух или более механически коммутируемых электродвигателей. Напротив, этот метод определения коммутации можно также использовать для регулирования любого отдельного механически коммутируемого электродвигателя, чтобы он мог работать как шаговый двигатель.
Как упомянуто выше, тот факт, что двигатели работают в пошаговом режиме, не исключает уменьшения или увеличения соотношения рабочего цикла для двигателей согласно заданному порядку, зависящему от данного устройства. Это обстоятельство не входит в состав данного изобретения. Под соотношением рабочего цикла понимается соотношение между временем действия переключающего средства и суммой активного-неактивного цикла.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления бесконтактным двигателем постоянного тока | 1980 |
|
SU892593A1 |
| СИСТЕМА ЭЛЕКТРОПИТАНИЯ И СПОСОБ УПРАВЛЕНИЯ МЕХАНИЧЕСКИ ПЕРЕКЛЮЧАЕМЫМ ЭЛЕКТРОДВИГАТЕЛЕМ | 2008 |
|
RU2479917C2 |
| ОДНОФАЗНЫЙ КОЛЛЕКТОРНЫЙ ДВИГАТЕЛЬ | 2007 |
|
RU2337459C1 |
| Вентильный электродвигатель | 1987 |
|
SU1427508A2 |
| ЭЛЕКТРИЧЕСКАЯ СИСТЕМА ДЛЯ ТУРБИНЫ/ГЕНЕРАТОРА ПЕРЕМЕННОГО ТОКА НА ОБЩЕМ ВАЛУ | 1997 |
|
RU2224352C2 |
| Управляемый вентильный электродвигатель | 1987 |
|
SU1458961A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ПОСТОЯННОГО ТОКА | 2008 |
|
RU2375811C1 |
| Реверсивный вентильный электропривод постоянного тока | 1978 |
|
SU758450A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ЗАПУСКА ЭЛЕКТРОДВИГАТЕЛЯ | 2011 |
|
RU2532532C2 |
| ПРЕОБРАЗОВАТЕЛЬ НАПРЯЖЕНИЯ И СПОСОБ УПРАВЛЕНИЯ ИМ | 2003 |
|
RU2251786C2 |
Изобретение относится к области электротехники и может быть использовано для регулирования механичеки коммутируемого электродвигателя постоянного тока или универсального двигателя. Техническим результатом является упрощение способа. В способе регулирования механически коммутируемого электродвигателя угол поворота якоря двигателя определяют по изменению противоэдс, когда происходит коммутация электродвигателя, причем электропитание электродвигателя прекращают после заданного числа обнаруживаемых коммутаций. 3 н. и 6 з.п. ф-лы, 2 ил.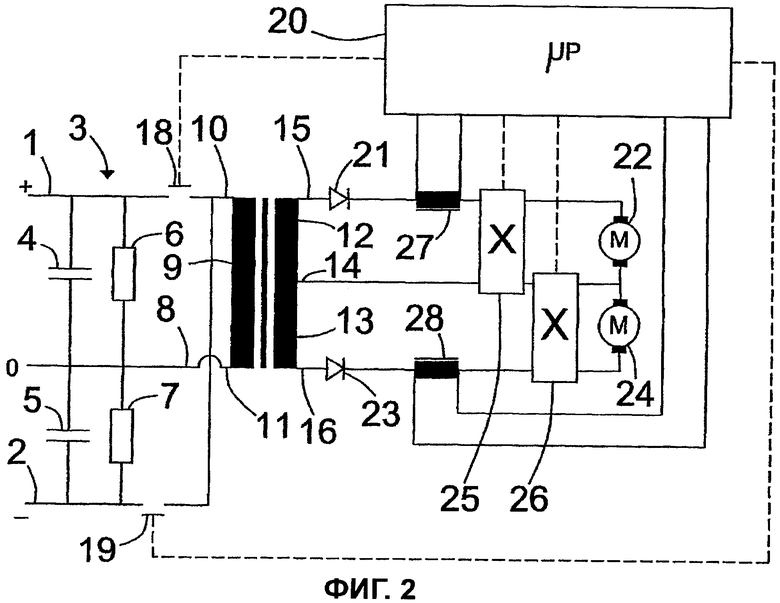
1. Способ регулирования механически коммутируемого электродвигателя, заключающийся в том, что определяют угол поворота якоря электродвигателя путем определения изменения противоэдс, когда происходит коммутация электродвигателя, и прекращают электропитание электродвигателя после заданного числа обнаруживаемых коммутаций.
2. Способ по п.1, отличающийся тем, что число обнаруживаемых коммутаций равно единице.
3. Способ по п.2, отличающийся тем, что определяют изменение противоэдс путем измерения напряжения в индукторе и/или резисторе, последовательно соединенных с двигателем на линии электропитания двигателя.
4. Способ по п.3, отличающийся тем, что в качестве механически коммутируемого электродвигателя используют универсальный двигатель или двигатель последовательного возбуждения, содержащий, по меньшей мере, одну катушку обмотки возбуждения, которая содержит индуктор для измерения упомянутого напряжения.
5. Способ по п.1, отличающийся тем, что механически коммутируемый электродвигатель регулируют путем широтно-импульсной модуляции, выполняемой микропроцессором.
6. Способ по п.1, отличающийся тем, что при обнаружении коммутации, если заданное число коммутаций не достигнуто, подачу тока уменьшают во время коммутации.
7. Способ регулирования первого механически коммутируемого электродвигателя и, по меньшей мере, одного дополнительного механически коммутируемого электродвигателя посредством микропроцессора, регулирующего электропитание для первого электродвигателя и дополнительного электродвигателя, указанный способ содержит этапы, на которых определяют углы поворота якоря первого электродвигателя и якоря, по меньшей мере, одного дополнительного электродвигателя путем определения изменения противоэдс, когда первый и, по меньшей мере, один дополнительный механически коммутируемые электродвигатели выполняют коммутацию, при этом, когда либо первый электродвигатель, либо, по меньшей мере, один дополнительный электродвигатель достигает заданного угла поворота якоря, прекращают электроснабжение этого двигателя, вновь осуществляют подачу тока на первый электродвигатель, либо, по меньшей мере, один дополнительный электродвигатель, когда другой из первого двигателя и, по меньшей мере, одного дополнительного электродвигателя достигнет заданного угла поворота якоря.
8. Способ по п.7, отличающийся тем, что первый двигатель и, по меньшей мере, один дополнительный электродвигатель регулируют одним и тем же микропроцессором.
9. Применение способа по любому из пп.1-8 при изготовлении мебели.
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1991 |
|
RU2047265C1 |
| RU 2002360 C1, 30.10.1993 | |||
| Способ регулирования многодвигательного электропривода многосекционного агрегата и устройство для осуществления способа регулирования многодвигательного электропривода многосекционного агрегата | 1980 |
|
SU936333A1 |
| Многодвигательный электропривод переменного тока | 1988 |
|
SU1661958A1 |
| US 4866554 A, 12.09.1989 | |||
| US 2002185926 A1, 12.12.2002 | |||
| US 6642680 B2, 04.11.2003 | |||
| JP 56145795 А, 12.11.1981 | |||
| JP 2005117716 A, 28.04.2005 | |||
| ЯМОКОПАТЕЛЬ | 1949 |
|
SU83437A1 |

