Изобретение относится к области подводной техники, в частности к телеуправляемым необитаемым подводным аппаратам (ТНПА) морского или речного назначения, для различного рода подводных исследований, выполнения несложных манипуляций под водой, например, фотовидеосъемки подводных объектов, а также в подводной робототехнике.
Известен спускаемый подводный дрон с надводной станцией передачи данных (патент RU №210112, 2022 г.), состоящий из надводной станции передачи данных и спускаемого подводного дрона, имеющего гидродинамическую форму для планирования при движении. Надводная станция, выполненная по известной схеме тримарана, служит для: перемещения подводного дрона с гидродинамическим крылом в подводном пространстве и при этом служит отсеком для установки электронных компонентов, источников питания, радиопередающей аппаратуры, установки видеооборудования для съемки надводной природной среды. В конструкции надводной станции имеется лебедка с установленной леской, которая служит для обеспечения погружения и всплытия подводного дрона и складывания кабеля-канала под натяжением через конструкционные хомуты. В конструкции надводной станции имеется двигательная установка, предназначенная для перемещения станции в надводном положении и перемещения сцепленного леской с лебедкой подводного дрона. Подводный дрон имеет конструкцию гидродинамического крыла, что позволяет использовать принцип планирования при перемещении надводной станции, получения стабилизации и плавности видеоизображения при подводной видеосъемке. В конструкции подводного дрона расположена рулевая система, выполненная в виде распределительных сопел, использующая для руления распределенный поток воды под давлением, создаваемого микронасосами внутри корпуса подводного дрона для создания вектора тяги радиального руления. Рулевая система подводного дрона позволяет изменять угол обзора установленной на борт видеокамеры в горизонтальной плоскости. В конструкции подводного дрона с гидродинамическим крылом расположено видеооборудование для съемки подводного мира. Для передачи видеоинформации и сигналов управления в комплексе используется классическая схема аналоговой радиопередачи. В комплексе имеется возможность переключения каналов видеоизображения на камеру надводной станции и камеру подводного дрона. Для приема видеоизображения используется гарнитура видеошлема, работающая по принципу отражения изображения от зеркал и имеющая открытую форму, которая позволяет синхронно наблюдать за перемещением надводной станции в пространстве и вести наблюдение с видеокамер на экране видеошлема. Комплекс позволяет производить одновременную видеосъемку подводного и надводного мира, изменять глубину погружения подводного дрона в движении, выполнять маневрирование в надводном пространстве без технической привязки по дальности действия к береговой линии или другим объектам, устанавливать на борт надводной станции малогабаритные экшен камеры посредством размещения видеокамер на унифицированном креплении. Техническим результатом является создание управляемой функциональной конструкции подводно-надводного комплекса технических средств с предоставлением возможности любительской и профессиональной съемки надводной природной среды и подводного мира с предоставлением пользователям удобной и функциональной в использовании конструкции, которая обеспечивает необходимый технический функционал для организации одновременной подводной и надводной видеосъемки с обеспечением необходимого кинематографического качества видеосъемки.
Недостатками известного спускаемого подводного дрона с надводной станцией передачи данных является невозможность задавать горизонтальный угол наклона из-за конструкции движителей, отсутствие приспособления для отбора объектов исследования под водой или проб воды в акваториях.
Наиболее близким по технической сути является телеуправляемый необитаемый подводный аппарат (патент RU №206387, 2021 г.), содержащий цилиндрический герметичный полый корпус с установленными горизонтальными и вертикальными движителями и модуль плавучести, соединенные между собой винтовым соединением. Модуль плавучести содержит соединенные между собой кожух, боковые панели и боковые стенки, образующие эллипсовидную форму, а расположенные в модуле плавучести поплавки соответствуют его внутренней форме, при этом в кожухе и боковых стенках выполнены дренажные отверстия.
Недостатками известного телеуправляемого необитаемого подводного аппарата являются вертикальная неустойчивость в толще воды из-за конструкции движителей, ограниченное время работы за счет питания от аккумуляторов, отсутствие приспособления для отбора объектов исследования под водой или проб воды в акваториях.
Техническая задача - создание телеуправляемого необитаемого подводного аппарата, способного выполнять научные исследования в речных и морских акваториях путем усовершенствования конструкции.
Технический результат - повышение эффективности устройства при его использовании, расширение диапазона его применения.
Он достигается тем, что в известном устройстве, содержащем герметичный полый корпус с установленными движителями и модуль плавучести, соединенные между собой винтовым соединением, модуль плавучести содержит соединенные между собой кожух, боковые панели и боковые стенки, а расположенные в модуле плавучести поплавки из жесткого пенополиуретана с закрытыми порами соответствуют его внутренней форме, в кожухе модуля плавучести и боковых стенках выполнены дренажные отверстия, аппарат оснащен кабелем связи, светодиодным глубоководным фонарем и видеокамерой, при этом корпус аппарата выполнен из PLA-пластика и имеет форму параллелепипеда, кожух модуля плавучести, боковые панели и боковые стенки жестко соединены между собой, в устройстве использованы векторно расположенные движители, направленные под углом 90° по отношению друг к другу в горизонтальной и вертикальной плоскостях, на передней стенке корпуса устройства, в нижней части, установлены и жестко фиксированы электромеханический одностепенной манипулятор для захвата объектов исследования, содержащий металлический корпус, подвижный двухпалый захват, шток и электродвигатель, соединенные последовательно, и система для отбора проб воды, содержащая корпус, всасывающие патрубки, связанные с системой трубопроводов, водосборниками и насосом и жестко соединенные с корпусом системы, на передней стенке корпуса аппарата жестко закреплены светодиодный глубоководный фонарь и видеокамера, а на задней стенке корпуса аппарата жестко закреплен кабель связи.
Конструкция предлагаемого ТНПА позволяет расширить диапазон его использования за счет оснащения устройства векторно расположенными движителями, позволяющими подводному аппарату двигаться в любых выбранных направлениях с регулируемым углом наклона, вращаться и удерживать глубину погружения, электромеханическим одностепенным манипулятором, позволяющим захватывать и перемещать объекты под водой, а также обеспечивать их подъем на поверхность воды, системой для отбора проб воды, обеспечивающей выполнение задач экологического мониторинга.
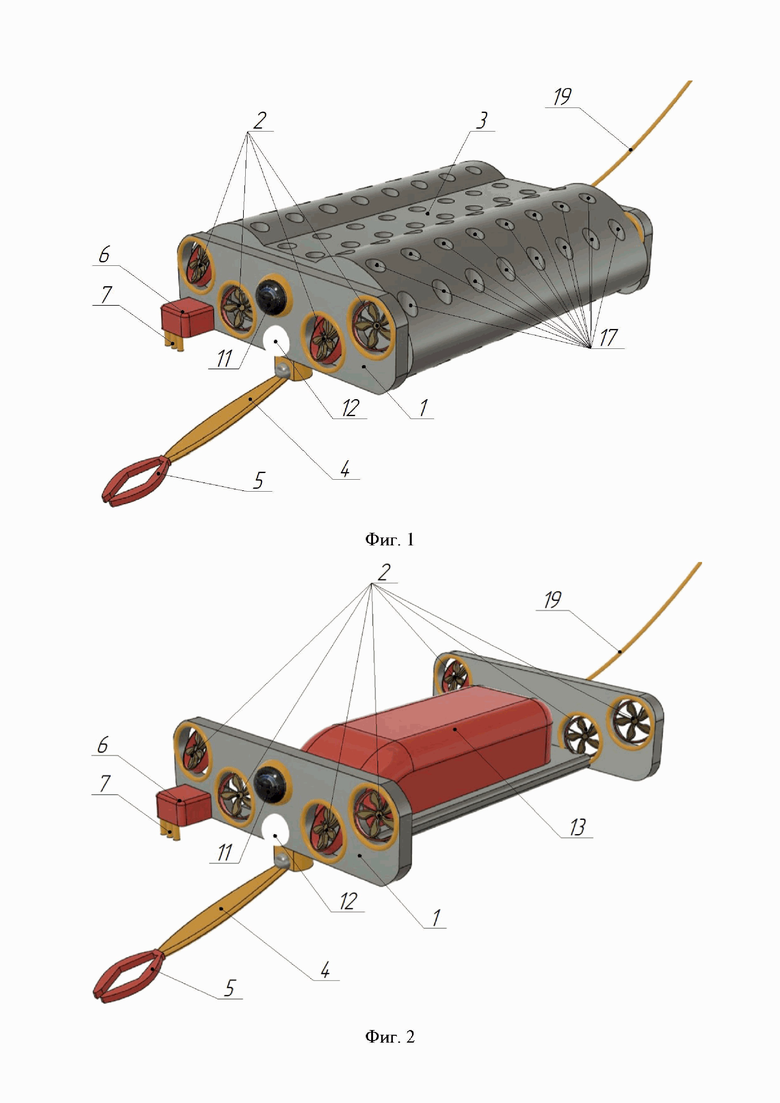
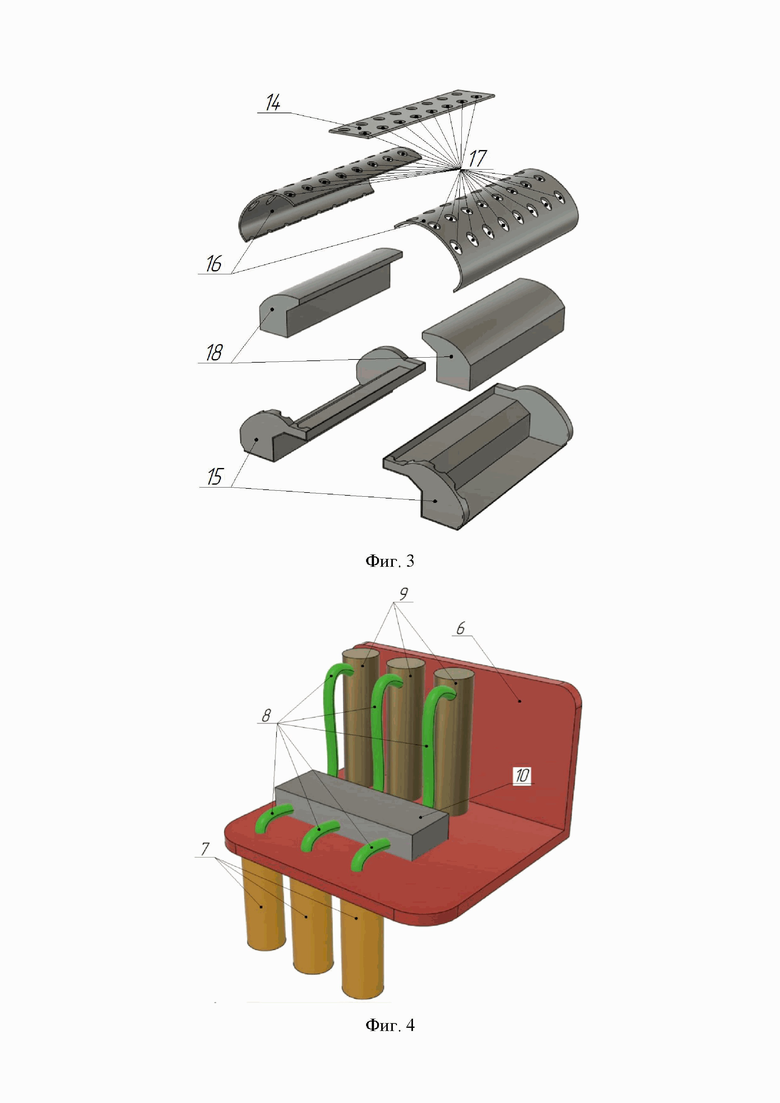
На чертеже изображен телеуправляемый необитаемый подводный аппарат (Фиг. 1 - общий вид, Фиг. 2 - общий вид без модуля плавучести, Фиг. 3-модуль плавучести, составные части, Фиг. 4 - система для отбора проб воды). Чертеж выполнен в 3D-формате.
Телеуправляемый необитаемый подводный аппарат (Фиг. 1, Фиг. 2) содержит герметичный полый корпус 1, на котором установлены восемь векторных движителей 2 и модуль плавучести 3. Каждый движитель имеет тягу до 5 кгс. В передней части корпуса закреплены электромеханический одностепенной манипулятор для захвата объектов исследования, содержащий металлический корпус 4, подвижный двухпалый захват 5, шток и электродвигатель (на чертеже не показаны), соединенные последовательно, позволяющий захватывать и перемещать объекты под водой и удерживать их при подъеме на поверхность, система для отбора проб воды, содержащая корпус 6, всасывающие патрубки 7, связанные с системой трубопроводов 8, водосборниками 9 и насосом 10, жестко соединенные с корпусом 6, на передней стенке корпуса 1 аппарата установлены и жестко закреплены видеокамера 11 и светодиодный глубоководный фонарь 12. В герметичном полом корпусе 1 размещен электронный блок 13, включающий модуль управления подводным аппаратом, модуль управления видеокамерой, модуль контроллера движителей 2 и дополнительно содержащий другие функциональные модули в зависимости от комплектации под определенные задачи (на чертеже не показаны). Модуль плавучести 3 содержит кожух 14, две боковые панели 15 и боковые стенки 16, жестко соединенные между собой. В кожухе 14 и боковых стенках 16 выполнены дренажные отверстия 17 для снижения гидродинамического сопротивления воды. Внутри модуля плавучести 3 расположены поплавки 18, которые выполнены из жесткого пенополиуретана с закрытыми порами и повторяют внутренние поверхности боковых панелей 15 и боковых стенок 16. Объем модуля плавучести 3 и поплавков 18 рассчитан на получение нейтральной плавучести ТНПА применительно к воде (морской или речной), в которой предстоит его эксплуатация. В задней стенке корпуса 1 аппарата жестко закреплен кабель связи 19, служащий дополнительно для подъема аппарата и объектов исследования (до 20 кг) и подачи электропитания системам аппарата.
Устройство работает следующим образом. Подготовленный к спуску ТНПА доставляют к акватории наземным или водным транспортом. Параллельно на берег или палубу судна доставляется и разворачивается надводная станция оператора. Далее оператором ТНПА производится проверка системы дистанционного управления, а также проверка всех вспомогательных систем. После спуска ТНПА в воду оператор осуществляет дистанционное управление. Движение ТНПА обеспечивается синхронной работой векторно расположенных движителей 2, что повышает маневренность аппарата. Отбор проб воды осуществляется удаленно оператором после погружения аппарата на выбранную глубину (до 200 м): при включении насоса 10 вода поступает через всасьшающие патрубки 7 по системе трубопроводов 8 в водосборники 9 внутри корпуса 6 системы отбора проб воды. Для захвата и перемещения объектов под водой оператор имеет возможность дистанционного управления подвижным двухпалым захватом 5 электромеханического одностепенного манипулятора. При превышении допустимого веса (более 5 кг) поднимаемый объект фиксируется в подвижном двухпалом захвате 5 и поднимается путем наматывания кабеля связи 19 на лебедку, установленную на берегу или на плавсредстве. Кабель связи 19 высокопрочный армированный, имеет нейтральную плавучесть, рассчитан на рабочую нагрузку 50 кгс, разрывное усилие 200 кгс.
Предлагаемая конструкция выгодно отличается от прототипа наличием восьми векторно расположенных движителей 2, что позволяет подводному аппарату двигаться во всех выбранных направлениях и удерживать заданную глубину погружения (до 200 м). Выполнение модуля плавучести 3 с дренажными отверстиями 17 диаметром 25 мм с шагом 30 мм обеспечивает снижение гидродинамического сопротивления при движении ТНПА под водой, а также снижает влияние естественного течения воды при работе ТНПА. Установка электромеханического одностепенного манипулятора в нижней части герметичного полого корпуса 1 ТНПА позволяет захватывать и перемещать объекты под водой, а также обеспечивать их подъем на поверхность воды. При превышении допустимого веса поднимаемого объекта возможна фиксация объекта в подвижном двухпалом захвате 5 и подъем с помощью кабеля связи нейтральной плавучести 19. Установка системы отбора проб воды в нижней части герметичного полого корпуса 1 позволяет работать через интервалы на различных глубинах (на поверхности, в термоклине и у дна в водоемах глубиной до 200 м). Установка кабеля связи нейтральной плавучести 19 позволяет передавать видеосигнал и управляющие сигналы, электропитание системам ТНПА, а также обеспечивать подъем аппарата на поверхность воды с объектом, зафиксированным в захватном устройстве с минимальным влиянием на подвижность подводного аппарата.
Пример конкретного выполнения. Телеуправляемый необитаемый подводный аппарат имеет габаритные размеры 450x600x1100 мм (высота х ширина х длина) и массу 20 кг в снаряженном состоянии. Герметичный полый корпус 1 выполнен из PLA-пластика (согласно ГОСТ 33366.1-2015 (ISO 1043-1:2011). Основные полимеры и их специальные характеристики) по методу 3D-печати. Векторно расположенные движители 2 (см. аналогичный ТНПА gnomrov.ru/products/rovs/gnom-pro-vector.html) - импеллеры фирмы Blue Robotics (см. интернет-магазин bluerobotics.com/store/thrusters/tl00-t200-thrusters/t200-thruster-r2-rp) обеспечивают движение ТНПА в выбранном направлении с максимальной скоростью 3 узла. Модуль плавучести 3 выполнен из алюминиево-магниевого сплава АМг3 (согласно ГОСТ 4784-97. Алюминий и сплавы алюминиевые деформируемые) и рассчитан на погружение на глубину до 200 м, имеет высокую прочность при небольшой массе и устойчив к механическим повреждениям, дренажные отверстия 17 выполнены по типу 1а (ГОСТР 58602-2019. Листы перфорированные). Электромеханический одностепенной манипулятор (см. продукцию ООО «Тетис Про» tetis-pro.ru/catalog/elektromekhamcheskiv-mampulyatornvv-zakhvat-dlya-podvodnogo-apparata/) снабжен подвижным двухпалым захватом 5 (см. продукцию ООО «Центр робототехники robocenter.net/goods/component-parts/mur-gripper/) и позволяет удерживать и перемещать объекты массой до 5 кг и удерживать неподвижно для поднятия на поверхность объекты массой до 20 кг. Система для отбора проб воды оснащена тремя водосборниками 8 и работает в водоемах на поверхности, в термоклине и у дна, в водоеме глубиной до 200 м (согласно Р 52.24.353 -2012. Отбор проб поверхностных вод суши и очищенных сточных вод). Светодиодный глубоководный фонарь 12 обеспечивает световой поток 8500 лм при угле рассеивания светового потока 160° (см. интернет-магазин fonarik4you.ru/podvodnvi-fonar-ferei-wl68-diod-3-h-cree-xhp-70/). Кабель связи нейтральной плавучести 19 (см. продукцию завода «Псков геокабель» pskovgeokabel.ru/products/1_29/) имеет длину 250 метров и состоит из оболочки из вспененного полиуретана, внутри которого расположены то ко проводящие провода из меди высокой чистоты с изоляцией из полиэтилена, кабель UTP категории 5е для передачи данных и стального каната одинарной свивки диаметром 2 мм (см. патент RU №163921, 2016 г.).
Положительный эффект - предлагаемое устройство позволяет повысить эффективность использования телеуправляемого необитаемого подводного аппарата, в частности для осуществления подводных исследований и расширить диапазон его применения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Комплекс для осуществления подводных работ | 2022 |
|
RU2785237C1 |
| Малогабаритный телеуправляемый подводный аппарат | 2021 |
|
RU2775894C1 |
| МАЛОГАБАРИТНЫЙ ТЕЛЕУПРАВЛЯЕМЫЙ ПОДВОДНЫЙ АППАРАТ | 2008 |
|
RU2387570C1 |
| Устройство для осуществления глубоководного контроля за подводной средой и подводно-техническими работами | 2019 |
|
RU2728888C1 |
| ГЛУБОКОВОДНЫЙ ДОБЫЧНОЙ КОМПЛЕКС И ТЕЛЕУПРАВЛЯЕМЫЙ ПОДВОДНЫЙ РОБОТ | 2002 |
|
RU2214510C1 |
| КОМБИНИРОВАННЫЙ ПОДВОДНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2022 |
|
RU2809785C1 |
| Модульный необитаемый подводный аппарат "Океаника-КИТ" | 2020 |
|
RU2738281C1 |
| Способ навигационного оборудования морского района и самоходный подводный аппарат для его осуществления и арктическая подводная навигационная система для вождения и навигационного обеспечения надводных и подводных объектов навигации в стесненных условиях плавания | 2021 |
|
RU2773538C1 |
| Способ проведения подводно-подледного сейсмопрофилирования с использованием перемещаемой подводным судном донной сейсморазведочной косы и технологический комплекс для его осуществления | 2014 |
|
RU2663308C2 |
| Автоматическое устройство для развертывания и свертывания донной антенны под водой и под ледовым покровом | 2016 |
|
RU2640896C1 |
Изобретение относится к области подводной техники, в частности к телеуправляемым необитаемым подводным аппаратам (ТНПА) морского или речного назначения. Телеуправляемый необитаемый подводный аппарат содержит герметичный полый корпус с установленными движителями и модуль плавучести, соединенные между собой винтовым соединением. Модуль плавучести содержит соединенные между собой кожух, боковые панели и боковые стенки, а расположенные в модуле плавучести поплавки из жесткого пенополиуретана с закрытыми порами соответствуют его внутренней форме. В кожухе модуля плавучести и боковых стенках выполнены дренажные отверстия. Аппарат оснащен кабелем связи, светодиодным глубоководным фонарем и видеокамерой. Корпус аппарата выполнен из PLA-пластика и имеет форму параллелепипеда. Кожух модуля плавучести, боковые панели и боковые стенки жестко соединены между собой. В аппарате использованы векторно расположенные движители, направленные под углом 90° по отношению друг к другу в горизонтальной и вертикальной плоскостях, на передней стенке корпуса аппарата, в нижней части, установлены и жестко фиксированы электромеханический одностепенной манипулятор для захвата объектов исследования, содержащий металлический корпус, подвижный двухпалый захват, шток и электродвигатель, соединенные последовательно, и система для отбора проб воды, содержащая корпус, всасывающие патрубки, связанные с системой трубопроводов, водосборниками и насосом и жестко соединенные с корпусом системы. На передней стенке корпуса аппарата жестко закреплены светодиодный глубоководный фонарь и видеокамера, а на задней стенке корпуса аппарата жестко закреплен кабель связи. Достигается повышение эффективности при использовании устройства и расширение диапазона его применения. 4 ил.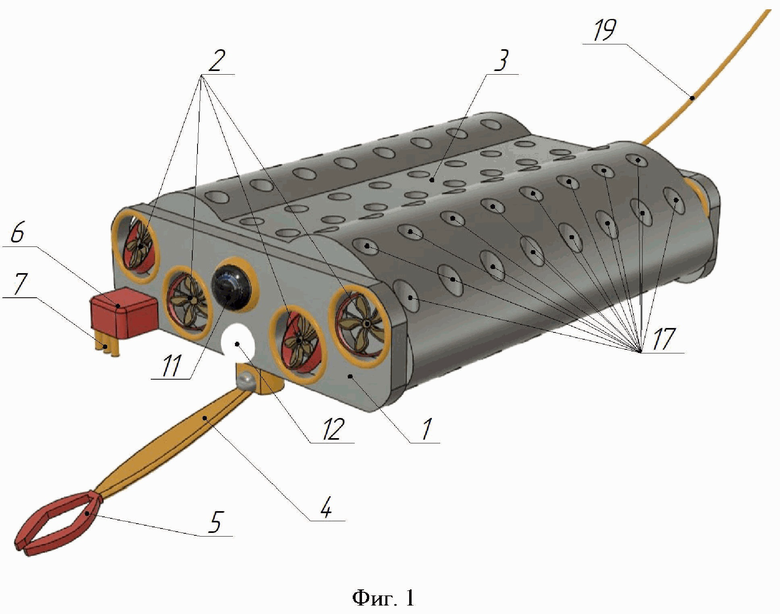
Телеуправляемый необитаемый подводный аппарат, содержащий герметичный полый корпус с установленными движителями и модуль плавучести, соединенные между собой винтовым соединением, модуль плавучести содержит соединенные между собой кожух, боковые панели и боковые стенки, а расположенные в модуле плавучести поплавки из жесткого пенополиуретана с закрытыми порами соответствуют его внутренней форме, в кожухе модуля плавучести и боковых стенках выполнены дренажные отверстия, аппарат оснащен кабелем связи, светодиодным глубоководным фонарем и видеокамерой, отличающийся тем, что корпус аппарата выполнен из PLA-пластика и имеет форму параллелепипеда, кожух модуля плавучести, боковые панели и боковые стенки жестко соединены между собой, в аппарате использованы векторно расположенные движители, направленные под углом 90° по отношению друг к другу в горизонтальной и вертикальной плоскостях, на передней стенке корпуса аппарата, в нижней части, установлены и жестко фиксированы электромеханический одностепенной манипулятор для захвата объектов исследования, содержащий металлический корпус, подвижный двухпалый захват, шток и электродвигатель, соединенные последовательно, и система для отбора проб воды, содержащая корпус, всасывающие патрубки, связанные с системой трубопроводов, водосборниками и насосом и жестко соединенные с корпусом системы, на передней стенке корпуса аппарата жестко закреплены светодиодный глубоководный фонарь и видеокамера, а на задней стенке корпуса аппарата жестко закреплен кабель связи.
| ПРИВОД ЛЕНТОЧНОГО КОНВЕЙЕРА | 0 |
|
SU206387A1 |
| Тормозной кран для пневматических тормозов автомобиля-тягача | 1957 |
|
SU108747A1 |
| CN 206615369 U, 07.11.2017 | |||
| МАЛОГАБАРИТНЫЙ ТЕЛЕУПРАВЛЯЕМЫЙ ПОДВОДНЫЙ АППАРАТ | 2008 |
|
RU2387570C1 |
| US 20070283871 A1, 13.12.2007. | |||

