Настоящее изобретение относится к способу определения защитного предела местоположения движущегося тела, вычисленного по спутниковым данным. Способ может быть осуществлен, в частности, для определения местоположения транспортного средства, например, в глобальной навигационной системе (GPS)
Уровень техники
Традиционно местоположение транспортного средства, такого как самолет, определяется, во-первых, на основе данных, поставляемых бортовым измерительным блоком (включающим в себя, например, инерциальное устройство и барометрический высотомер), и, во-вторых, из данных, выделенных из спутниковых сигналов, полученных от созвездия спутников на орбите вокруг Земли. Информация, поступающая от спутниковых сигналов, включает в себя расстояния (известные как псевдорасстояния) между самолетом и спутниками, передающими спутниковые сигналы, и эти псевдорасстояния рассчитываются на основе местоположения спутников и времени, необходимого для сигналов, чтобы достичь самолета. Совместная обработка этих данных местоположения и времени, например, с помощью вычислительного фильтра калмановского типа дает возможность определить состояние самолета, т.е. его особо точное местоположение, которое близко к истинному местоположению самолета, скорость и высоту самолета.
Между приемом двух групп спутниковых сигналов местоположение самолета экстраполируется или оценивается на основе инерционных данных, отнесенных к самому последнему вычисленному местоположению. Это местоположение, определенное подобным образом, периодически обновляется при каждой возможности, когда принимаются спутниковые сигналы.
Точность вычисленного местоположения, однако, очень чувствительна к отказу внутри созвездия спутников, т.е. в случае спутникового отказа, повлиявшего на точность информации, которую он передает, и в случае необнаруживаемого отказа, или же кроме этого в случае двух спутников в созвездии, отказавших одновременно или последовательно (в то же время риск одновременного отказа в работе трех спутников настолько мал, что может игнорироваться).
По этой причине общепринято обеспечивать пилота самолета пределом или объемом, которые называются «защитным» пределом, центрированным на вычисленном местоположении, и который является показателем точности вышеупомянутого местоположения, после принятия во внимание риска отказа одного или двух спутников. Полный защитный объем - это вертикально ориентированный цилиндр, определяемый своим радиусом и своей высотой, которые обычно обозначаются как HPL и VPL. Истинное местоположение самолета в предположении, что оно не совпадает точно с вычисленным местоположением, имеет вероятность нахождения вне полного защитного объема, который не больше, чем некоторый приемлемый порог безопасности (или «риск целостности»).
При вычислении защитного объема предполагается, что можно определить риск целостности, принимая во внимание вероятность того, что в созвездии спутников нет никаких отказов, есть один отказ и есть два отказа. Защитный объем, соответствующий каждому условию, вычисляется на основе статистического распределения для ошибки местоположения. Полный защитный объем определяется таким образом, что риск целостности не меньше, чем вероятность того, что реальное местоположение лежит внутри защитного объема. Существует несколько способов вычисления этого защитного объема. Документ US-A-2004/239560 описывает один такой способ вычисления.
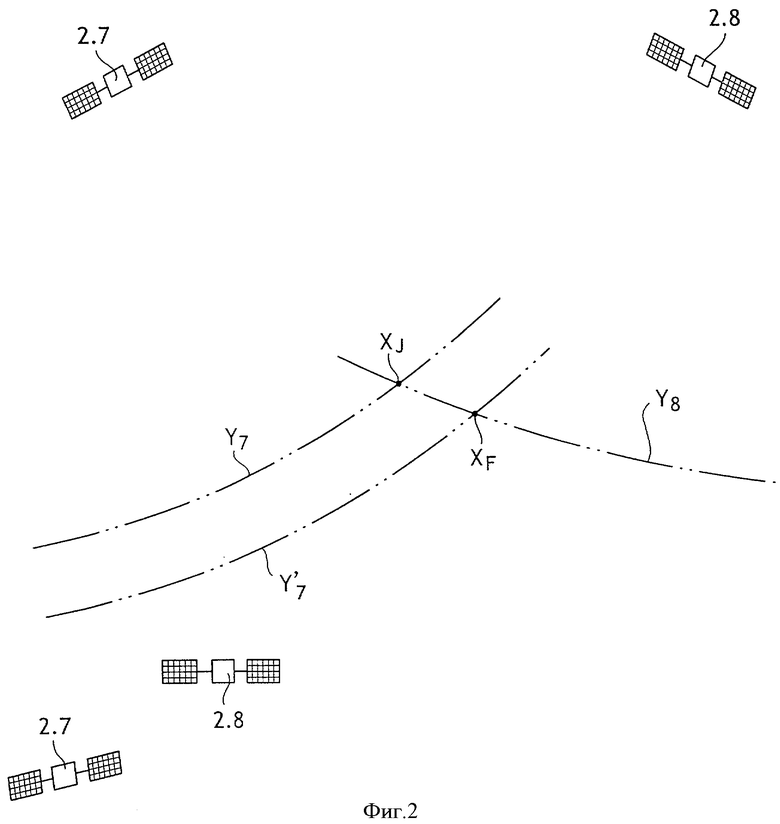
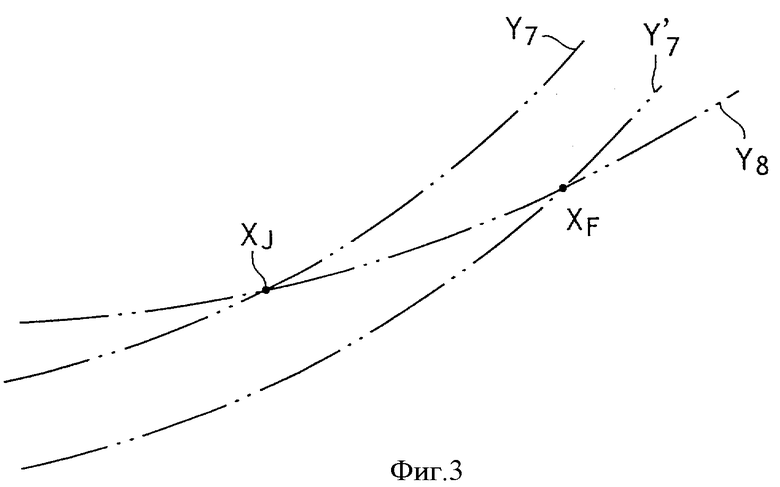
Однако отказы в созвездии спутников - не единственное событие, которое может влиять на точность вычисленного местоположения. Так, может случиться, что сигналы подвергаются отражениям, например, от географического рельефа, вдоль пути следования сигналов к летательному аппарату. Эти отражения (обычно на них ссылаются как на многолучевое распространение) увеличивают время между сигналами, передаваемыми спутниками, и теми же самыми сигналами, принятыми самолетом, и они привносят ошибку в вычислении псевдорасстояний. На фиг.2 и 3 можно увидеть два весьма упрощенных примера, показывающих влияние подобных отражений на вычисление вертикальной компоненты местоположения самолета на базе только из двух спутников. Линии Y7 и Y'7 отображают псевдорасстояния между самолетом и спутником 2.7 соответственно без и с многолучевым распространением, а линия Y8 отображает псевдорасстояние между самолетом и спутником 2.8 в отсутствие многолучевого распространения. Истинное местоположение Xj самолета находится в точке пересечения между линиями Y7 и Y8. На фиг.2, где самолет находится между двумя спутниками, разнесенными очень далеко, можно заметить, что истинное местоположение Xj лежит выше ложного местоположения XF, тогда как обратное изображается на фиг.3, где спутники находятся близко друг к другу. Подобная конфигурация особенно неприятна для самолета, учитывая, что точность в вертикальной компоненте относительно поверхности Земли имеет большое значение.
В существующих способах вертикальный защитный предел одинаков вверх и вниз, хотя, как упомянуто выше, точность определения в одном направлении или в другом направлении не приводит к одинаковым последствиям, в особенности в определенных обстоятельствах, специфических для самолета, летящего на небольшой высоте или в процессе посадки. Кроме того, в существующих способах вертикальный защитный предел ненадежен перед явлением многолучевого распространения.
Цель изобретения
Целью изобретения является создание способа, позволяющего усовершенствовать вычисление защитных пределов в двух противоположных направлениях.
Сущность изобретения
С этой целью изобретение предоставляет способ определения защитного предела вокруг местоположения X1 движущегося тела, оснащенного приемником спутниковых сигналов, причем местоположение X1 вычисляется по псевдорасстояниям, вычисленным из данных местоположения и времени, выделенных из сигналов, переданных созвездием спутников, содержащий этап вычисления защитного предела VPL1 в первом направлении от местоположения X1 и включающий далее следующие этапы:
- вычисляют границу МММ+, соответствующую смещению вычисленного местоположения относительно реального местоположения XF движущегося тела, причем это смещение происходит в первом направлении и происходит из-за отражений сигналов во время их передачи; и
- вычисляют второй защитный предел VPL2 на местоположении, вычисленном во втором направлении, противоположном первому направлению из вычисленного местоположения, и включают в него границу.
Термин «направление» употребляется здесь в его собственном, каждодневном значении (подобно тому же вектору) для того, чтобы указать ориентацию от начала к заданной точке параллельно прямой линии, проходящей через начало и упомянутую точку. Таким образом, относительно вертикальной оси имеется два противоположных направления, соответственно вверх и вниз параллельно упомянутой оси. В способе по изобретению защитный предел по второму направлению включает в себя границу, чтобы учесть отражения сигнала. В результате можно получить защитные пределы в первом и втором направлениях, различающиеся в зависимости от того, насколько критична ошибка по каждому из этих направлений.
Предпочтительно, чтобы вычисление местоположения X1 по псевдорасстояниям выполнялось с помощью матрицы НV наблюдений за созвездием, которая включает в себя параметры места и времени, границу МММ+ и второй защитный предел VPL2, вычисленные с использованием следующих этапов:
- оценивают уход b часов приемника и определяют максимальное влияние bmax отражений на оцененный уход часов;
- корректируют псевдорасстояния оцененным уходом часов;
- вычисляют максимальную ошибку ΔY' на скорректированные псевдорасстояния из-за максимального влияния bmax;
- вычисляют второе местоположение Х2 из скорректированных псевдорасстояний и из подматрицы HF матрицы HV наблюдения, объединяющей только параметры местоположения;
- вычисляют границу МММ+ из псевдоинверсии G' подматрицы HF и из максимальной ошибки ΔY; и
- вычисляют второй защитный предел VPL2 добавлением к первоначальному защитному пределу VPL1 границы МММ+ и расстояния между первым местоположением P1 и вторым местоположением P2 параллельно этим направлениям.
Этот способ вычисления особенно подходит для осуществления изобретения. Другие характеристики и преимущества изобретения проявятся при чтении нижеследующего описания частного неограничивающего варианта осуществления изобретения.
Краткое описание чертежей
Ссылка делается на сопровождающие чертежи, на которых:
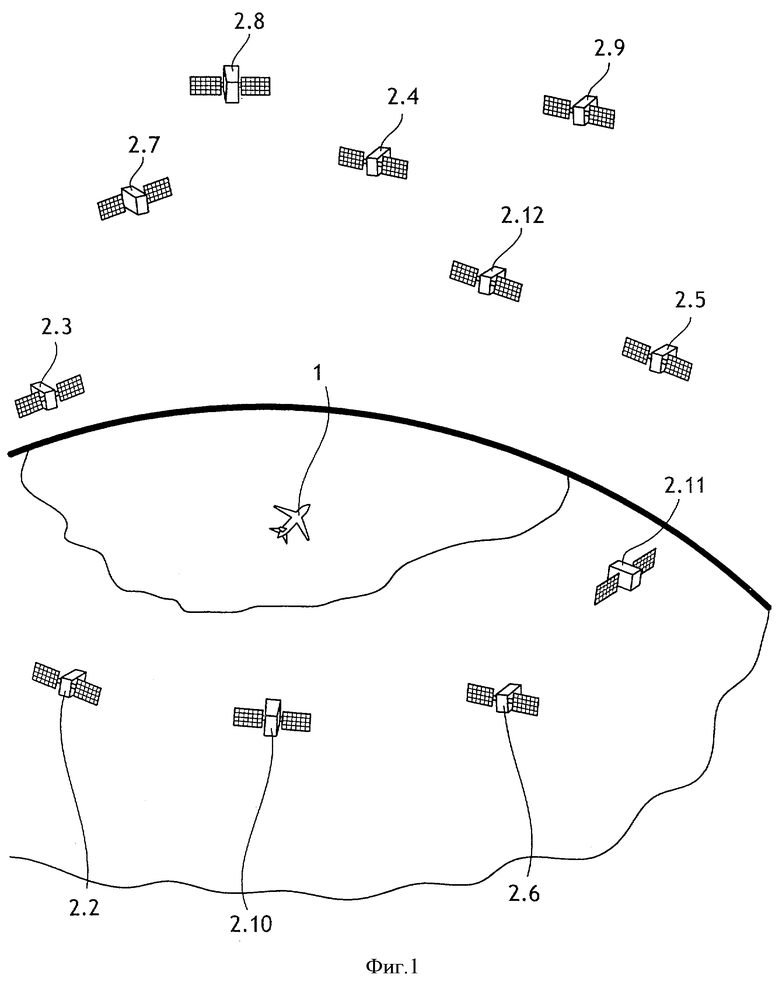
фиг.1 представляет схематическое изображение созвездия спутников, расположенных выше горизонта самолета, и
фиг.2 и 3 представляют диаграммы, показывающие, как определяется вертикальная компонента местоположения самолета.
Подробное описание изобретения
По фиг.1, способ изобретения описан здесь со ссылкой на самолет 1, имеющий на борту навигационную систему, использующую данные, поступающие от N спутников 2.i (где i лежит в диапазоне от 1 до N, т.е. 2.1, 2.2, 2.3, 2.4, 2.5, 2.6, 2.7, 2.8, 2.10, 2.11, 2.12 на чертеже), причем спутники расположены на орбите вокруг Земли 100, а также использующую информацию, поступающую от инерциального блока, установленного на борту самолета 1.
Инерциальный блок известен сам по себе и реагирует на датчики, прикрепленные к самолету 1 для передачи информации, связанной, в частности, с дифферентом самолета, его скоростью.
Спутники 2.1-2.12 образуют часть спутникового комплекса на орбите вокруг Земли и являются частью системы спутникового позиционирования глобальной навигационной системы (GPS). Каждый из спутников 2.i непрерывно передает сигнал о его собственном местоположении и точное время, в которое сигнал отправлен. N спутников 2.i, таким образом, передают N сигналов с регулярными интервалами, и эти сигналы ниже рассматриваются как «спутниковые данные».
Навигационная система включает в себя традиционным образом компьютерный блок, связанный с инерциальным блоком и приемником для приема спутниковых сигналов. Компьютерный блок традиционно включает в себя процессоры и запоминающие устройства, которые позволяют ему вычислять псевдорасстояния между самолетом 1 и каждым из спутников 2.i, сигнал от которого обнаружен приемником, и объединять псевдорасстояния и данные, поступающие от инерциального блока так, чтобы определить, среди прочего, местоположение самолета 1.
Вычисления выполняются традиционным образом с помощью калмановских фильтров или любого другого алгоритма, который служит, в частности, для объединения данных.
Навигационная система, таким образом, действует периодически, чтобы вычислять и определять состояние самолета, т.е. местоположение, скорость и высоту самолета на базе инерциальных данных спутниковой информации. Местоположение определяется горизонтальной компонентой (такой как широта и долгота) и вертикальной компонентой (такой как высота).
Между приемом двух посылок спутниковых сигналов навигационная система действует для вычисления и выдачи местоположений, которые оцениваются исключительно из инерциальной информации (которая доступна непрерывно), начиная с ранее определенных местоположений, причем эта операция называется «распространением». При получении новых спутниковых данных оцененное местоположение перезагружается как функция от упомянутых новых спутниковых данных, причем эта операция называется «перезагрузка». Перезагрузка выполняется только если спутниковая информация удовлетворяет тесту проверки правильности, который сам по себе известен и называется тестом «обновления».
Для каждого вычисленного местоположения система также обеспечивает защитный объем, определяемый горизонтальным защитным пределом HPL и вертикальным защитным пределом VPL, вычисленным по спутниковым данным. Для упрощения обратимся первоначально к вертикальному защитному пределу VPL (поскольку принципы, по которым рассчитаны вертикальный защитный предел и горизонтальный защитный предел, по существу идентичны).
Защитный объем, который должен быть как можно меньше, определяется таким образом, что если реальное местоположение Х самолета не совпадает точно с вычисленным местоположением, то тогда вероятность реального местоположения, лежащая вне полного защитного объема, не больше, чем некоторый приемлемый порог безопасности.
Вообще каждый защитный предел вычисляется на основе вероятности отказа в созвездии спутников, вероятности отсутствия отказа в созвездии спутников и заранее определенном первом пороге Pir безопасности. Таким образом, вероятность ошибки е местоположения, будучи больше, чем защитный предел, сама по себе меньше или равна допустимому порогу Pir безопасности в случае отказа в спутниковой группировке (этот порог безопасности известен как риск «целостности»). Это записывается так:
Р(е≥PL)≤Pir.
Защитный предел вычисляется обычным образом на основе статистического распределения ошибки относительно вычисленного местоположения (Гауссовское распределение для вертикальной компоненты местоположения и распределение χ2 для горизонтальной компоненты местоположения). Риск Pir целостности не должен быть превышен в случае отказа одного или двух спутников из группировки. Отказ трех спутников в группировке имеет вероятность 10-12, и он игнорируется.
Способ, в котором предел вертикального местоположения рассчитывается для вычисленного местоположения X1, описан ниже.
Вычисленное местоположение X1 получается обычным образом по псевдорасстояниям и из матрицы Hv наблюдений за созвездием спутников, объединяющей параметры местоположения - косинусы направления для каждого из спутников 2.i (служащее для геометрического соединения каждого спутника с самолетом) - и временные параметры, относящиеся к уходу часов приемника и одинаковые для всех спутников (и равные 1 для данного примера).
Это дает Hv=[ui1], имеющую следующую псевдоинверсию:
G=(Hv T·Hv)-1·Hv T.
Вертикальная компонента z1 местоположения X1 задается как:
z1=[0010]·G·Y.
Вертикальный защитный предел VPL вычисляется обычным образом по статистическому распределению ошибки относительно вертикального компонента.
Первый вертикальный защитный предел VPL1 в направлении вверх равен VPL.
Далее вычисляется второй вертикальный защитный предел VPL2 в направлении вниз.
Для этого уход часов b оценивается следующим образом:
и максимальное воздействие bmax отраженных волн на оцененный уход часов вычисляется по следующей формуле:

где G4i являются временными параметрами матрицы G (суммы, связанные соответственно с положительными G4i и отрицательными G4i), a ΔY является максимально возможной ошибкой измерения из-за отражений.
Эта ошибка связана со свойствами приемника спутниковых сигналов и вычисляется, например, при помощи способа, включающего в себя этап, на котором сигнал считается представляющим корреляцию энергии между принятым сигналом и опорным сигналом, и этап, на котором ведется поиск отклонения между определяемым сигналом и центрированным сигналом, представляющим автокорреляцию энергии при псевдослучайном кодировании, причем упомянутое отклонение, найденное подобным образом, соответствует ошибке слежения кода.
При этом способе поиск отклонения между центрированным сигналом и определяемым сигналом также заключается в смещении определяемого сигнала на длительность смещения.
Для большей точности искомое смещение между центрированным сигналом и определяемым сигналом соответствует длительности смещения, приложенной к определяемому сигналу для того, чтобы в результате определяемый сигнал, располагался как можно ближе к центрированному сигналу.
При первом выполнении поиска смещения между определяемым сигналом и центрированным сигналом сумма квадратов разностей между центрированным сигналом и определяемым сигналом вычисляется для каждой величины смещения определяемого сигнала, причем эта сумма квадратов ограничивается нарастающей частью центрированного сигнала. Искомое смещение является смещением, приложенным к принимаемому сигналу, для которого квадратичная сумма вычисленных ошибок является наименьшей.
При втором выполнении поиска смещения между определяемым сигналом и сцентрированным сигналом выявляется максимум определяемого сигнала. Выявление максимума в определяемом сигнале состоит в вычислении энергии определяемого сигнала для каждой длительности смещения, примененной к определяемому сигналу совместно с найденным смещением, являющимся смещением определяемого сигнала, которое дает наибольшую энергию для определяемого сигнала.
При третьем выполнении поиска смещения между определяемым сигналом и центрированным сигналом выявляется разрыв в крутизне определяемого сигнала. Выявление разрыва в крутизне заключается в вычислении разности энергии между двумя последовательными смещениями определяемых сигналов.
В четвертом выполнении поиска смещения между определяемым сигналом и центрированным сигналом вычисляется произведение корреляции между каждым центрированным сигналом и определяемым сигналом для каждых продолжительностей смещений, примененных к определяемому сигналу, причем центрированный сигнал ограничивается своей нарастающей частью. Искомое смещение является смещением определяемого сигнала, для которого вычисленная величина корреляции наибольшая.
После этого псевдорасстояния Y корректируются на основе оцененного ухода  часов, т.е.:
часов, т.е.:
 ,
,
и максимальная ошибка ΔY' из-за отражений на исправленных псевдорасстояниях Y' вычисляется следующим образом:
ΔY'=ΔY+bmax.
Второе местоположение Х2 вычисляется затем из скорректированных псевдорасстояний Y' и из подматрицы HF матрицы Hv наблюдений таким образом, что подматрица HF включает в себя только параметры местоположения матрицы Hv, т.е.:
Hv=[HF lnx1]
c Hv=[ui].
Вертикальная компонента  местоположения Х2, таким образом, равна
местоположения Х2, таким образом, равна  с
с
G'=(HF T·HF T)-1·HF T.
Граница МММ+ тогда вычисляется таким образом, что
с матрицей G3i', представляющей параметры, связанные с вертикальной компонентой в матрице G, и эта сумма применима только к тому параметру, который больше 0.
Затем вычисляется расстояние между местоположениями X1 и Х2 вдоль вертикальной оси, т.е. d(X1, Х2)2.
Второй вертикальный защитный предел VPL2 тогда равен:
VPL2=VPL+МММ++d(X1, X2).
Как вариант, максимальное воздействие bmax может быть вычислено с помощью следующей формулы:

и второй защитный предел может быть вычислен с помощью следующей формулы:
В другом варианте возможно вычислить границу для первого защитного предела VPL1:
VPL1=VPL+MMM-+d(X1,X2)z, где
Естественно, изобретение не ограничивается описанными реализациями, но охватывает любой вариант, попадающий в пределы изобретения, как определено в формуле изобретения.
Местоположения могут быть оценены только из спутниковых данных или используя данные, поступающие от измерительного блока, такого как инерциальный блок.
Изобретение применимо для любого движущегося объекта, такого как сухопутное, морское или иное транспортное средство.
Если спутниковая система навигации не в состоянии работать с местоположением, которое находится вне центра относительно вычисленных защитных пределов, то способ включает в себя этап суммирования защитных пределов и этап вычисления местоположения, находящегося в центре относительно этой суммы.
Вычисление различных защитных пределов в двух различных направлениях может также применяться для горизонтальных направлений.
Способ определения защитного предела вокруг местоположения X1 движущегося тела, оснащенного приемником спутниковых сигналов, причем местоположение X1 вычисляется по псевдорасстояниям, вычисленным из данных местоположения и времени, выделенных из сигналов, переданных созвездием спутников, содержащий этап вычисления первого защитного предела VPL1 в первом направлении от местоположения X1 и включающий далее следующие этапы: вычисляют границу МММ+, соответствующую смещению вычисленного местоположения относительно реального местоположения XF движущегося тела, причем это смещение происходит в первом направлении и происходит из-за отражений сигналов во время их передачи; и вычисляют второй защитный предел VPL2 на местоположении, вычисленном во втором направлении, противоположном первому направлению из вычисленного местоположения, и включают в него границу защитного предела. Достигаемым техническим результатом изобретения является увеличение точности определения защитного предела в двух противоположных направлениях. 5 з.п. ф-лы, 3 ил.
1. Способ определения защитного предела вокруг местоположения X1 движущегося тела, оснащенного приемником спутниковых сигналов, причем местоположение X1 вычисляется по псевдорасстояниям, вычисленным из данных местоположения и времени, выделенных из сигналов, переданных созвездием спутников, содержащий этап вычисления первого защитного предела VPL1 в первом направлении от местоположения X1 и включающий далее следующие этапы:
вычисляют границу МММ+, соответствующую смещению вычисленного местоположения относительно реального местоположения XF движущегося тела, причем это смещение происходит в первом направлении и происходит из-за отражений сигналов во время их передачи; и
вычисляют второй защитный предел VPL2 на местоположении, вычисленном во втором направлении, противоположном первому направлению из вычисленного местоположения, и включают в него границу.
2. Способ по п.1, в котором вычисление местоположения X1 по псевдорасстояниям выполняют с помощью матрицы HV наблюдений за созвездием, которая включает в себя параметры местоположения и времени, границу МММ+ и второй защитный предел VPL2, вычисленные с использованием следующих этапов:
оценивают уход b часов приемника и определяют максимальное влияние bmax отражений на оцененный уход часов;
корректируют псевдорасстояния оцененным уходом часов;
вычисляют максимальную ошибку ΔY' на скорректированные псевдорасстояния из-за максимального влияния bmax;
вычисляют второе местоположение X2 из скорректированных псевдорасстояний и из подматрицы HF матрицы HV наблюдения, объединяющей только параметры местоположения;
вычисляют границу МММ+ из псевдоинверсии G' подматрицы HF и из максимальной ошибки ΔY; и
вычисляют второй защитный предел VPL2 добавлением к первому защитному пределу VPL1 границы МММ+ и расстояния между первым местоположением X1 и вторым местоположением X2 параллельно этим направлениям.
3. Способ по п.1, включающий этап суммирования первого защитного предела VPL1 и второго защитного предела VPL2, включающего границу МММ+, и этап вычисления центрированного местоположения относительно упомянутой суммы.
4. Способ по п.1, в котором движущимся телом является самолет и направления вертикальны.
5. Способ по п.4, в котором второе направление ориентировано вниз.
6. Способ по п.1, включающий этап включения границы МММ- в первый защитный предел VPL1, причем защитный предел соответствует смещению вычисленного местоположения X1 относительно реального местоположения XF во втором направлении и из-за отражений этих сигналов.
| СИСТЕМА КОНТРОЛЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ТРАНСПОРТНОГО СРЕДСТВА И ЕГО МЕСТОНАХОЖДЕНИЯ | 2001 |
|
RU2221276C2 |
| RU 2004114253 A, 27.10.2005 | |||
| RU 2158963 C1, 10.11.2000 | |||
| RU 2003129925 A, 10.04.2005 | |||
| WO 03030125 A1, 10.04.2003 | |||
| US 5600329 A, 04.02.1997 | |||
| US 5361212 A, 01.11.1994 | |||
| US 6445983 B1, 03.09.2003 | |||
| WO 2004042418 A1, 21.05.2004 | |||
| JP 2002323552 A, 08.11.2002 | |||
| WO 95049941 A1, 16.02.1995. | |||

