Настоящее изобретение относится к способу нахождения охранного предела вокруг местоположения движущегося тела при вычислении по спутниковым данным. Способ может быть воплощен, в частности, при определении местоположения транспортного средства, к примеру, в цифровой глобальной навигационной системе, известной под сокращением GPS.
Уровень техники
Традиционно, местоположение такого транспортного средства как самолет находится на основе, во-первых, данных, предоставленных бортовым измерительным блоком (к примеру, включающим в себя инерциальный блок и барометрический высотомер), а, во-вторых, данных, выделенных из спутниковых сигналов, поступающих от созвездия спутников на орбите вокруг Земли. Данные, выделенные из спутниковых сигналов, содержат расстояния (или псевдорасстояния) между самолетом и спутниками, передающими спутниковые сигналы. Объединенная обработка этих данных, к примеру посредством вычислительного фильтра калмановского типа, дает возможность найти состояние самолета, т.е., в частности, точное местоположение, близкое к реальному местоположению самолета, и скорость и высоту самолета.
Между приемом двух наборов сигналов от спутников местоположение самолета экстраполируется или оценивается по инерционным данным, примененным к наиболее недавно вычисленному местоположению. Найденное таким образом местоположение периодически сбрасывается каждый раз, когда принимается новый набор спутниковых сигналов.
Точность, с которой вычисляется местоположение, тем не менее весьма чувствительна к нарушению в созвездии спутников, т.е. в случае отказа одного спутника таким образом, что это влияет на точность данных, которые он передает, и без обнаружения отказа, или в случае одновременного или последовательного отказа двух спутников в созвездии (если риск одновременного отказа трех спутников настолько низок, что им обычно пренебрегают).
Вот почему обычно пилота самолета снабжают пределом или объемом, именуемым «охранным» объемом, который центрируется на вычисленном местоположении и который представляет точность упомянутого местоположения, с учетом риска отказа одного или двух спутников. Общий охранный объем представляет собой цилиндр с вертикальной осью, определенный своим радиусом и своей высотой, которые традиционно называются горизонтальным охранным пределом (ГОП) (HPL) и вертикальным охранным пределом (ВОП) (VPL). Реальное местоположение самолета, если оно не совпадает точно с вычисленным местоположением, тем не менее, представляет вероятность нахождения вне общего охранного объема, т.е. меньше или равную некоторому приемлемому порогу безопасности (или риску надежности).
Вычисление охранного объема предполагает, что риск надежности можно определить, учитывая вероятность того, что в созвездии спутников нет отказов, есть один отказ или есть два отказа. Вычисление охранного объема, соответствующее каждому из этих обстоятельств, основано на статистическом распределении ошибки местоположения. Общий охранный объем находится таким образом, чтобы риск надежности был не меньше, чем вероятность того, что реальное местоположение лежит в охранном объеме. Имеется несколько способов вычисления охранного объема. Заявка США №2004/0239560 описывает один такой способ вычислений.
Требуемая обработка данных и вычисление охранного объема являются, тем не менее, относительно длительными, так что вычисленный охранный объем доставляется пользователю с некоторой задержкой. Помимо этого, по причинам вычислительной нагрузки охранный объем можно вычислять и обновлять только с частотой, которая ниже, чем частота, с которой доставляются данные. Эта ситуация приводит к задержке между моментом, в котором охранный объем верен, и моментом, в который пользователь принимает охранный объем готовым к использованию. В результате охранный объем, доставленный к пользователю, не является на деле верным при наличии данной задержки, поэтому такую задержку следует минимизировать, если не совсем исключить.
В контексте данного изобретения предусматривается увеличить охранный объем при увеличении скорости самолета. Тем не менее, этот способ приводит к получению охранного объема, который слишком велик, за счет чего снижается доступность самолета (т.е. процент времени, в течение которого охранный объем меньше, чем заранее заданное значение). Помимо этого, имеется отсутствие точности, связанное со скоростью, с которой наступает риск искажения вычислений.
Цель изобретения состоит в создании способа вычислений охранного предела более надежно.
Сущность изобретения
Для этого изобретение обеспечивает способ нахождения для будущего момента t+Δt охранного предела PLpos(t+Δt) вокруг местоположения для движущегося тела, и это местоположение вычисляют из спутниковых данных, поступающих от созвездия спутников в настоящий момент t, причем способ содержит этапы, на которых:
- выбирают порог безопасности, связанный с местоположением в будущий момент Pir, распределяют этот порог безопасности между порогом безопасности, связанным с местоположением, Рir pos, и порогом безопасности, связанным со скоростью, Pirv;
- находят местоположение и скорость для движущегося тела в настоящий момент t;
- вычисляют статистическую ошибку, связанную с местоположением, и статистическую ошибку, связанную со скоростью, в настоящий момент;
- на основе этого и на основе порога безопасности, связанного с местоположением, и порога безопасности, связанного со скоростью, вычисляют охранный предел, связанный с местоположением в настоящий момент, PLpos(t), и охранный предел, связанный со скоростью в настоящий момент, PLv(t); и
- вычисляют охранный предел PLpos(t+Δt), такой что

где γ есть максимально возможное ускорение движущегося тела.
Таким образом, получают охранный предел PLpos(t+Δt), который относительно мал, но при этом гарантирует соответствие с порогом безопасности по временному горизонту, равному dt.
Преимущественно, порог местоположения больше, чем порог безопасности, связанный со скоростью.
Порог безопасности, связанный с местоположением, который больше порога безопасности, связанного со скоростью, содействует получению малого охранного предела для будущего момента.
Предпочтительно, пороги безопасности, связанный с местоположением и связанный со скоростью в настоящий момент, таковы, что

Таким образом возможно иметь малые порог безопасности, связанный с местоположением, для будущего момента.
В таком случае, предпочтительно, порог безопасности, связанный с местоположением, и порог безопасности, связанный со скоростью, в настоящий момент, равны примерно 80% и 10% соответственно, от порога безопасности, связанного с местоположением, в будущий момент.
Данное распределение порога безопасности, связанного с местоположением, для будущего момента между порогами безопасности, связанным с местоположением и связанным со скоростью, в настоящий момент представляет собой оптимальный компромисс, задающий охранный предел, который особенно мал.
Другие характеристики и преимущества изобретения станут ясны при прочтении нижеследующего описания конкретного неограничивающего воплощения изобретения.
Краткое описание чертежей
Ссылки делаются на сопровождающие чертежи, на которых:
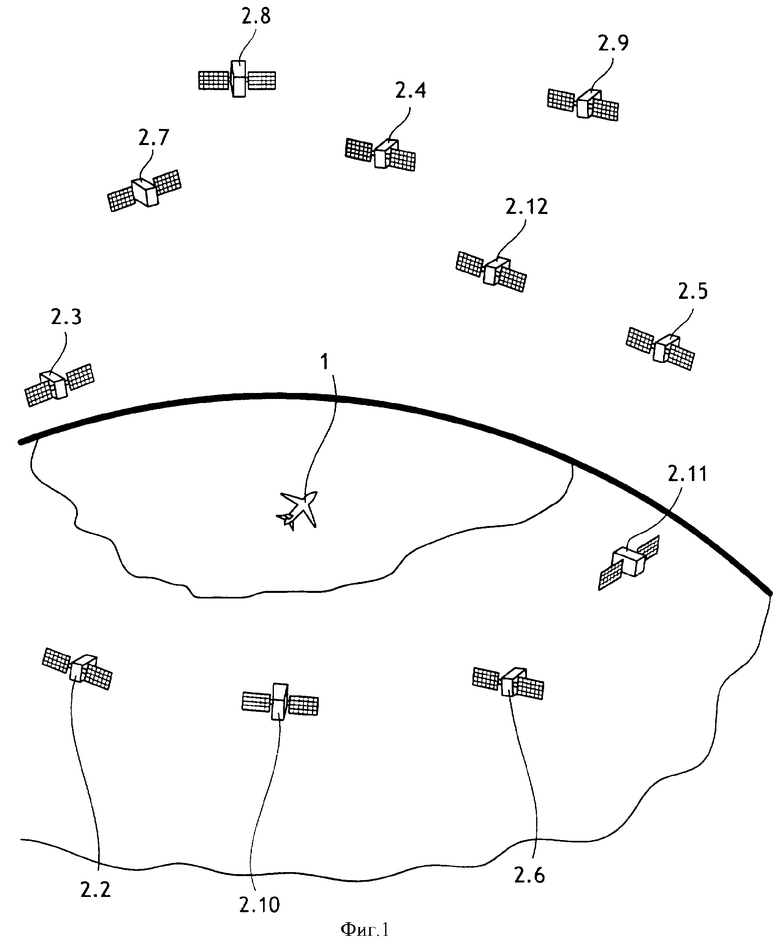
фиг.1 является схемой, показывающей созвездие спутников над горизонтом самолета; и
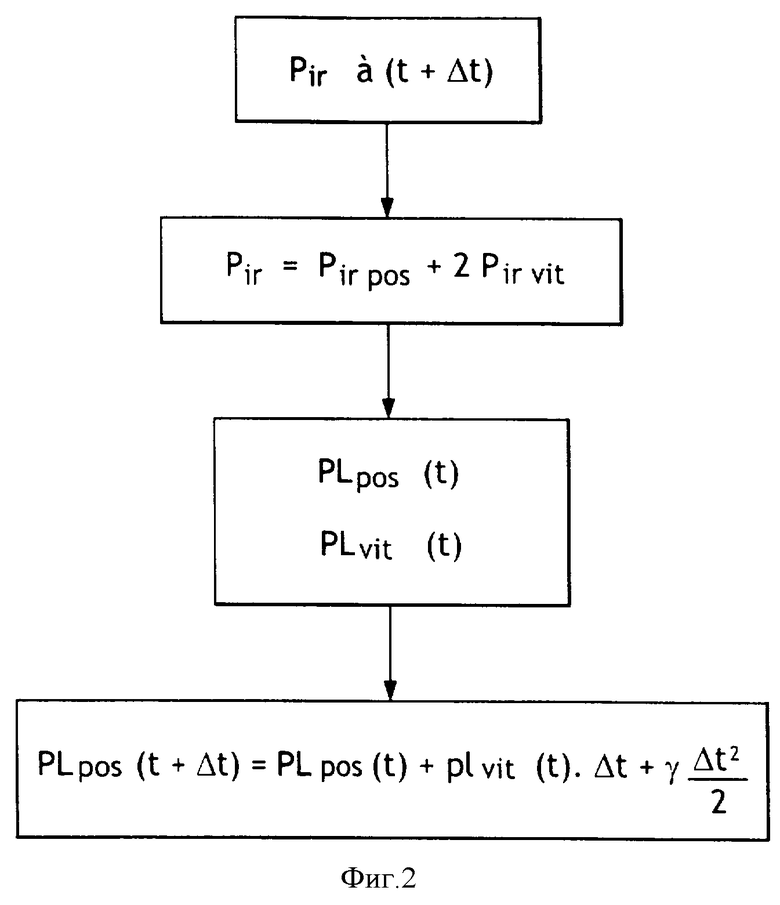
фиг.2 является блок-схемой, показывающей способ в конкретном воплощении.
Подробное описание изобретения
Со ссылкой на фиг.1 способ по изобретению описан ниже со ссылкой на самолет 1, несущий навигационную систему, которая использует данные, поступающие от N спутников 2.i (где i изменяется от 1 до N, т.е. 2.1, 2.2, 2.3, 2.4, 2.5, 2.6, 2.7, 2.8, 2.9, 2.10, 2.11, 2.12 на этом чертеже), и эти спутники находятся на орбите над Землей 100, а, кроме того, данные поступают от инерциального навигационного блока на борту самолета 1.
Инерциальный навигационный блок известен сам по себе и в ответ на датчики, закрепленные на самолете 1, он доставляет данные, относящиеся, в частности, к высоте самолета 1, его скорости,…
Спутники 2.1-2.12 формируют часть набора спутников, которые расположены на орбите вокруг Земли и которые принадлежат спутниковой системе определения местоположения типа GPS. Каждый спутник 2.i непрерывно вещает сигнал, конкретизирующий его местоположение и точное время, в которое этот сигнал был передан. N спутников 2.i таким образом передают с регулярными интервалами N сигналов, которые именуются ниже как спутниковые данные.
Навигационная система известным образом содержит вычислительный блок, соединенный с инерциальным навигационным блоком и с приемником для приема сигналов от спутника. Вычислительный блок включает в себя традиционные процессоры и запоминающие блоки, позволяющие ему вычислять псевдорасстояния между самолетом 1 и каждым из спутников 2.i, сигнал от которого принят приемником, и объединять эти псевдорасстояния и данные, поступающие от инерциальной навигационной системы, чтобы найти, среди прочего, местоположение самолета 1.
Вычисления выполняются известным образом с помощью калмановских фильтров или любого иного алгоритма, который позволяет объединять данные.
Навигационная система, кроме того, периодически доставляет состояние самолета, т.е. местоположение, скорость и высоту самолета, на основе инерциальных данных и спутниковых данных. Местоположение определяется горизонтальной составляющей (здесь широта и долгота) и вертикальной составляющей (здесь высота).
Между приемом двух наборов спутниковых сигналов навигационная система предоставляет оцененные местоположения на основе одних инерциальных данных (которые получаются непрерывно), начиная от более ранних местоположений, и эта операция именуется «распространением». При приеме новых спутниковых данных местоположение, оцененное на момент приема спутниковых данных, сбрасывается после проверки верности упомянутых спутниковых данных.
Для каждого оцененного местоположения система также предоставляет охранный объем, определенный горизонтальным охранным пределом HPL (ГОП) и вертикальным охранным пределом VPL (ВОП), которые вычисляются из спутниковых данных. Для упрощения ниже сделана ссылка на охранный предел PL (если операции по вычислению вертикального охранного предела и горизонтального охранного предела практически одинаковые).
Охранный объем, который должен быть как можно меньше, определяется так, что, если реальное местоположение самолета не совпадает точно с вычисленным местоположением, то упомянутое реальное местоположение имеет вероятность лежать вне общего охранного объема, который меньше или равен приемлемому порогу безопасности.
Для заданного местоположения охранный предел PL традиционно вычисляется на основе вероятности отказа в созвездии спутников, вероятности отсутствия отказа в созвездии спутников и заранее заданного порога Pir безопасности. Таким образом, можно записать р(е≥PL)≤Pir, что означает, что вероятность ошибки е местоположения больше, чем охранный предел PL, который меньше или равен пределу Pir безопасности, который приемлем в случае отказа в созвездии спутников (где этот порог безопасности называется также риском надежности). Охранный предел PL вычисляется известным образом на основе статистического распределения ошибки в вычисленном местоположении (Гауссово распределение для вертикальной составляющей местоположения и χ2 распределение для горизонтальной составляющей местоположения). Риск Рir надежности не должен превышаться даже в случае отказа одного или двух спутников в созвездии. Отказ трех спутников в созвездии игнорируется, поскольку он имеет вероятность 10-12.
В способе по изобретению желательно обеспечить охранный предел, который верен для будущего момента t+Δt для местоположения самолета в этот момент, т.е. PLpos(t+Δt). Для этого используют местоположение и скорость самолета, определенные ранее и верные в настоящий момент t. Местоположение можно определить из одних спутниковых данных или также используя инерциальные данные. Скорость можно определить из спутниковых данных или интегрированием ускорений, измеренных инерциальным блоком.
После этого вычисляется статистическое распределение ошибок (или статистическая ошибка), связанная с местоположением в настоящий момент, и вычисляется статистическое распределение ошибок, связанных со скоростью в настоящий момент. Приемлемый порог безопасности для будущего момента есть Pir, и он разделяется между порогом безопасности, связанным с местоположением, Рir pos, и порогом безопасности, связанным со скоростью, Рir v, так что предпочтительно  и Pir pos=80%Pir, a Pir v=10%Pir.
и Pir pos=80%Pir, a Pir v=10%Pir.
Это распределение оптимально, но возможны и иные распределения.
Охранный предел, связанный с вычисленным местоположением в настоящий момент t, т.е. PLpos(t), вычисляется затем на основе статистической ошибки, связанной с местоположением, и порога безопасности, связанного с местоположением, Pir pos.
Охранный предел, связанный с вычисленной скоростью в настоящий момент t, т.е. PLv(t), вычисляется затем на основе статистической ошибки, связанной со скоростью, и порога безопасности, связанного с местоположением, Pir v. Эти охранные пределы
PLpos(t) и PLv(t) получаются с помощью традиционных способов вычислений.
Охранный предел, связанный с местоположением для будущего момента (t+Δt), т.е. PLpos(t+Δt), вычисляется по следующей формуле:

где γ есть максимально возможное ускорение движущегося тела. В данном примере γ установлена на десятикратное ускорение, обусловленное тяготением, т.е. γ=10g.
После вычисления охранных пределов PLpos(t) и PLv(t) можно предусмотреть этап оптимизации распределения порога Pir безопасности, чтобы как можно больше снизить охранные пределы PLpos(t) и PLv(t).
Для примера можно выбрать следующее: Рir=10-7, Pir pos=8×10-8 и Pir v=10-8.
Естественно, изобретение не ограничено описанными вариантами осуществления, но охватывает любые варианты, попадающие в пределы изобретения, как оно определено формулой изобретения.
Местоположения можно оценивать из одних спутниковых данных или также из данных, поступающих от измерительного блока, такого как инерциальный блок.
Изобретение применимо к любому движущемуся телу, такому как наземное, водное или иное транспортное средство.
Распределение может отличаться от вышеописанного, например: Pir=10-7, Pir pos=5×10-8 и Pir v=2,5×10-8. Предел Рir pos безопасности может быть равен 80% от Pir, а предел Pir v безопасности может быть равен 20% от Pir, либо можно использовать любое иное распределение, такое как 50%-50%, 60%-40%, 70%-30%.
Может быть выбрано некоторое иное значение для максимально возможного ускорения в зависимости, в частности, от производительности транспортного средства.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ЗАЩИТНОГО ПРЕДЕЛА ВОКРУГ МЕСТОПОЛОЖЕНИЯ ДВИЖУЩЕГОСЯ ТЕЛА, ВЫЧИСЛЕННОГО ПО СПУТНИКОВЫМ СИГНАЛАМ | 2008 |
|
RU2389042C2 |
| ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ НАВИГАЦИОННАЯ СИСТЕМА С КОМБИНИРОВАННЫМ ИСПОЛЬЗОВАНИЕМ СПУТНИКОВЫХ ДАННЫХ | 2007 |
|
RU2334199C1 |
| ОТКАЗОУСТОЙЧИВАЯ ИНТЕГРИРОВАННАЯ НАВИГАЦИОННАЯ СИСТЕМА С ИЗБЫТОЧНЫМ КОЛИЧЕСТВОМ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2014 |
|
RU2570358C1 |
| СПОСОБ ПОМОЩИ В НАВИГАЦИИ ДЛЯ ОПРЕДЕЛЕНИЯ ТРАЕКТОРИИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2523183C2 |
| ИНТЕГРИРОВАННАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2004 |
|
RU2277696C2 |
| КОМПЛЕКСНАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1993 |
|
RU2087867C1 |
| СИСТЕМА ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ ПРИ ЛЕТНЫХ ИСПЫТАНИЯХ | 1996 |
|
RU2134911C1 |
| АЭРОНАВИГАЦИОННОЕ УСТРОЙСТВО С ИНЕРЦИОННЫМИ ДАТЧИКАМИ И РАДИОНАВИГАЦИОННЫМИ ПРИЕМНИКАМИ И СПОСОБ АЭРОНАВИГАЦИИ, ИСПОЛЬЗУЮЩИЙ ТАКИЕ ЭЛЕМЕНТЫ | 2007 |
|
RU2434248C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ВОЗДУШНЫМ СУДНОМ ВНЕШНЕЙ ИМИТАЦИОННОЙ ПОМЕХИ, ВНОСЯЩЕЙ ОШИБКУ В ОПРЕДЕЛЕНИЕ ЕГО МЕСТОПОЛОЖЕНИЯ | 2019 |
|
RU2708679C1 |
| КОМПЛЕКСНЫЙ СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2014 |
|
RU2558699C1 |
Заявленный способ нахождения охранного предела PLpos(t+Δt) вокруг движущегося тела, вычисленный для будущего момента t+Δt из спутниковых данных, поступающих от созвездия спутников, причем способ содержит этапы, на которых выбирают порог безопасности, связанный с местоположением в будущий момент Рir, распределяют этот порог безопасности между порогом безопасности, связанным с местоположением, Рir pos, и порогом безопасности, связанным со скоростью, Pir v; находят местоположение и скорость для движущегося тела в настоящий момент t; вычисляют статистическую ошибку, связанную с местоположением, и статистическую ошибку, связанную со скоростью, в настоящий момент; на основе этого и на основе порога безопасности, связанного с местоположением, и порога безопасности, связанного со скоростью, вычисляют охранный предел, связанный с местоположением в настоящий момент, PLpos(t), и охранный предел, связанный со скоростью в настоящий момент, PLv(t); и вычисляют охранный предел PLpos(t+Δt), такой что:

где γ есть максимально возможное ускорение движущегося тела. Достигаемым техническим результатом изобретения является повышение надежности определения охранного предела местоположения движущегося объекта. 6 з.п. ф-лы, 2 ил.
1. Способ нахождения для будущего момента t+Δt охранного предела PLpos(t+Δt) вокруг местоположения для движущегося тела и это местоположение вычисляют из спутниковых данных, поступающих от созвездия спутников в настоящий момент t, причем способ содержит этапы, на которых:
выбирают порог безопасности, связанный с местоположением в будущий момент Pir, распределяют этот порог безопасности между порогом безопасности, связанным с местоположением, Рir pos, и порогом безопасности, связанным со скоростью, Рir v;
находят местоположение и скорость для движущегося тела в настоящий момент t;
вычисляют статистическую ошибку, связанную с местоположением, и статистическую ошибку, связанную со скоростью, в настоящий момент;
на основе этого и на основе порога безопасности, связанного с местоположением, и порога безопасности, связанного со скоростью, вычисляют охранный предел, связанный с местоположением в настоящий момент, PLpos(t), и охранный предел, связанный со скоростью в настоящий момент, PLv(t); и
вычисляют охранный предел PLpos(t+Δt) такой, что

где γ есть максимально возможное ускорение движущегося тела.
2. Способ по п.1, в котором порог местоположения больше, чем порог безопасности, связанный со скоростью.
3. Способ по п.2, в котором пороги безопасности, связанный с местоположением и связанный со скоростью, в настоящий момент таковы, что
Pir=Pir pos+2Pir ν.
4. Способ по п.3, в котором порог безопасности, связанный с местоположением, и порог безопасности, связанный со скоростью, в настоящий момент равны примерно 80 и 10% соответственно от порога безопасности, связанного с местоположением, в будущий момент.
5. Способ по п.1, в котором после вычисления охранных пределов, связанного со скоростью и связанного с местоположением, выполняют этап оптимизации распределения порога безопасности, связанного с местоположением для будущего момента, чтобы получить меньшие охранные пределы, связанный со скоростью и связанный с местоположением.
6. Способ по п.1, в котором местоположение для будущего момента t+Δt экстраполируют из местоположения в настоящий момент t.
7. Способ по п.1, в котором максимально возможное ускорение γ устанавливают примерно 10g.
| СИСТЕМА КОНТРОЛЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ТРАНСПОРТНОГО СРЕДСТВА И ЕГО МЕСТОНАХОЖДЕНИЯ | 2001 |
|
RU2221276C2 |
| RU 2004114253 A, 27.10.2005 | |||
| RU 2158963 C1, 10.11.2000 | |||
| RU 2003129925 A, 10.04.2005 | |||
| US 5600329 A, 04.02.1997 | |||
| US 5361212 A, 01.11.1994 | |||
| WO 2004042418 A1, 21.05.2004 | |||
| JP 2002323552 A, 08.11.2002 | |||
| EP 0574009 A2, 15.12.1993. | |||

