Область техники, к которой относится изобретение
Описываемый объект изобретения относится к получению привязки по времени, связанной с сигналами навигации, принятыми в опорном местоположении.
Уровень техники
Спутниковая система позиционирования (SPS), как правило, содержит систему вращающихся вокруг земли спутников, которые позволяют объектам определять свое местоположение на земле на основании, по меньшей мере частично, сигналов, принятых от спутников. Такие спутники SPS, как правило, передают сигнал, маркированный повторяющимся кодом псевдослучайного (PN) шума из установленного числа элементарных сигналов. Например, спутник из группы (созвездия) Глобальной Системы Спутниковой Навигации (GNSS), такой как GPS (Глобальная Система Позиционирования) или Galileo (Галилео), может передавать сигнал, маркированный кодом PN, то есть различимый среди кодов PN, передаваемых прочими спутниками из созвездия.
Для оценки местоположения в приемнике система навигации может определять измерения псевдорасстояния до спутников «в зоне видимости» приемника, используя известные технологии, основанные, по меньшей мере частично, на детектировании кодов PN в принятых от спутников сигналах. Такое псевдорасстояние до спутника может определяться на основании, по меньшей мере частично, временного сдвига кода, обнаруженного в принятом сигнале, маркированном кодом PN, связанным со спутником, в процессе обнаружения принятого сигнала в приемнике. Для обнаружения принятого сигнала система навигации, как правило, определяет корреляцию принятого сигнала со сформированным локально кодом PN, связанным со спутником. Например, такая система навигации, как правило, определяет корреляцию такого принятого сигнала с множеством смещенных по коду и/или во времени версией такого сформированного локально кода PN. Обнаружение конкретной смещенной по времени и/или коду версии, которая обеспечивает результат корреляции с наивысшей мощностью сигнала, может указывать временной сдвиг (фазу) кода, связанный с полученным сигналом для использования при измерении псевдорасстоянии, как рассматривалось выше.
После определения временного сдвига кода сигнала, принятого от спутника GNSS, приемник может формировать многочисленные гипотезы псевдорасстояний. Используя дополнительную информацию, приемник может исключить такие гипотезы псевдорасстояний для того, чтобы фактически снизить неопределенность в отношении истинного размера псевдорасстояния. В добавление, при кодировании с периодически повторяющейся последовательностью кода PN сигнал, передаваемый спутником GNSS, может также подвергаться модуляции дополнительной информацией, такой как, например, сигнал данных и/или известной последовательностью значений. Посредством детектирования такой дополнительной информации в принятом от спутника GNSS сигнале приемник может исключить ложные гипотезы псевдорасстояний, связанные с принятым сигналом. В одном примере, такая дополнительная информация может содержать привязку по времени, связанную с сигналом, принятым от спутника GNSS. При достаточной точности в сведениях о хронировании сигнала, принятого от спутника GNSS, могут быть исключены некоторые или все ложные гипотезы псевдорасстоянии.
Фиг. 1 иллюстрирует использование системы SPS, при этом станция 100 абонента в системе беспроводной связи принимает передачи от спутников 102a, 102b, 102c, 102d по линии визирования станции 100 абонента и получает замеры времени из четырех или более передач. Станция 100 абонента может предоставлять такие замеры объекту 104 определения позиции (PDE), который из замеров определяет позицию станции. В качестве альтернативы, станция 100 абонента может определять свою собственную позицию из этой информации.
Станция 100 абонента может производить поиск передачи от конкретного спутника посредством корреляции кода PN для спутника с принятым сигналом. Принятый сигнал, как правило, содержит смесь передач от одного или более спутников по линии визирования приемника станции 100 в присутствии шума. Корреляция может выполняться по диапазону гипотез временного сдвига кода, известному как интервал WCP поиска временного сдвига кода, и по диапазону гипотез доплеровских частот, известному как интервал WDOPP доплеровского поиска. Как отмечено выше, такие гипотезы временного сдвига кода, как правило, представлены как диапазон смещений кода PN. Так же гипотезы доплеровских частот, как правило, представлены как элементы доплеровских частот.
Корреляция обычно выполняется по времени интегрирования «I», которое может быть выражено как произведение NC и M, где NC является временем когерентного интегрирования, а M - числом когерентных интегрирований, которые объединяются некорегентным образом. Для конкретного кода PN значения корреляции, как правило, связаны с соответствующими смещениями кода PN и доплеровскими элементами разрешения, чтобы определить двумерную функцию корреляции. Определяется местоположение пиков функции корреляции, и они сравниваются с заранее установленным порогом шума. Порог, как правило, выбирается таким образом, чтобы вероятность ложных тревог, т.е. вероятность ложного обнаружения передачи спутника, находилась ниже заранее установленного значения. Замер времени для спутника, как правило, получают из местоположения наиболее раннего пика небокового лепестка по координате временного сдвига кода, который равен или превышает порог. Доплеровское измерение для станции абонента может быть получено из местоположения наиболее раннего пика небокового лепестка по координате доплеровских частот, который равен или превышает порог.
Извлечение информации хронирования или привязки по времени, связанной с полученным сигналом GNSS, потребляет ресурсы мощности и обработки. Такое потребление ресурсов мощности и обработки, как правило, является существенным ограничением проектирования для портативных изделий, таких как мобильные телефоны и прочие устройства.
Краткое описание чертежей
Неограничивающие и неисчерпывающие признаки будут описаны со ссылкой на нижеследующие чертежи, при этом подобные ссылочные позиции относятся к подобным элементам для всех различных чертежей.
Фиг. 1 является схематичным чертежом спутниковой системы позиционирования (SPS) в соответствии с одним аспектом.
Фиг. 2 показывает схематичный чертеж системы, которая выполнена с возможностью определять местоположение в приемнике посредством измерения псевдорасстояний до космических аппаратов (SV) в соответствии с одним аспектом.
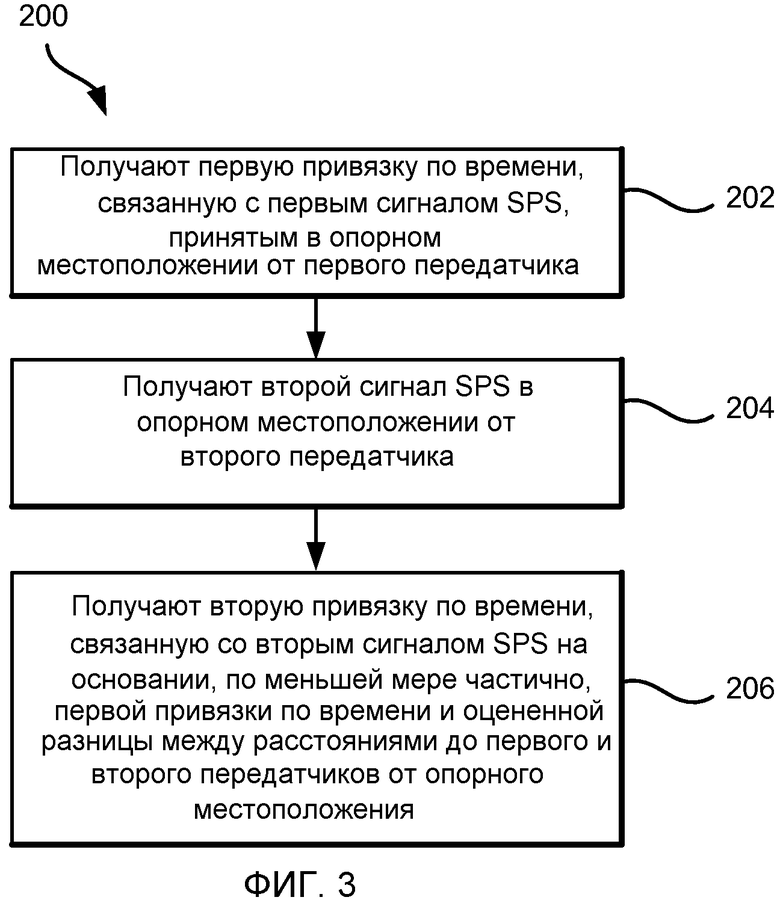
Фиг. 3 является блок-схемой, иллюстрирующей процесс получения привязки по времени для сигнала, полученного от SV в опорном местоположении, в соответствии с одним аспектом.
Фиг. 4 является временной диаграммой, иллюстрирующей связь привязки по времени в первом сигнале, принятом в опорном местоположении, и привязкой по времени во втором сигнале, принятом в опорном местоположении, в соответствии с одним аспектом.
Фиг. 5 является временной диаграммой, иллюстрирующей связь привязки по времени в первом сигнале, принятом в опорном местоположении, и привязкой по времени во втором сигнале, принятом в опорном местоположении, в соответствии с одним аспектом.
Фиг.6 является временной диаграммой, иллюстрирующей связь привязки по времени в первом сигнале, принятом в опорном местоположении, и привязкой по времени во втором сигнале, принятом в опорном местоположении, в соответствии с одним аспектом.
Фиг. 7 является временной диаграммой, иллюстрирующей связь привязки по времени в первом сигнале, принятом в опорном местоположении, и привязки по времени во втором сигнале, принятом в опорном местоположении, в соответствии с одним аспектом.
Фиг. 8 является временной диаграммой, иллюстрирующей связь привязки по времени в первом сигнале, принятом в опорном местоположении, и привязки по времени во втором сигнале, принятом в опорном местоположении, в соответствии с одним аспектом.
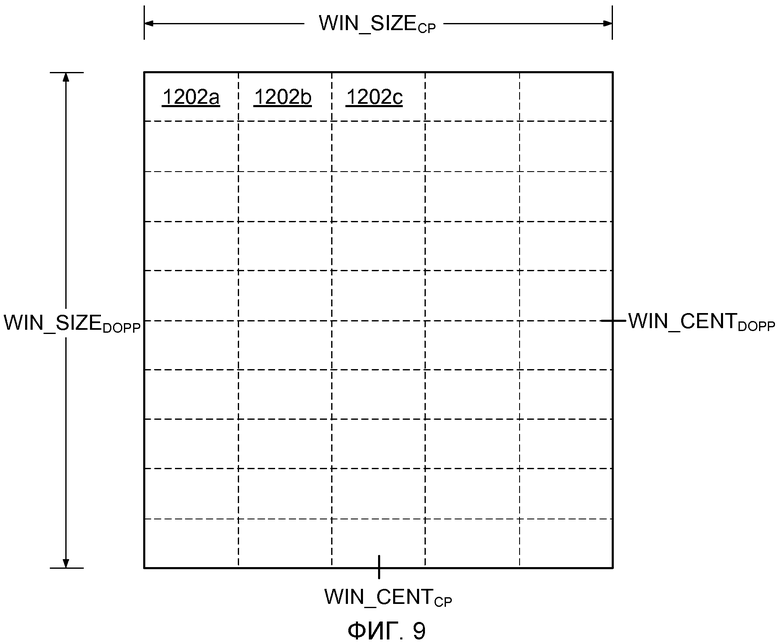
Фиг. 9 является схематичным чертежом двумерной области, по которой будет производиться поиск для обнаружения сигнала, передаваемого от космического аппарата, в соответствии с одним аспектом.
Фиг. 10 иллюстрирует наложение установленного числа элементарных сигналов в интервале поиска для предотвращения пропуска пиков, которые происходят на границах сегмента, в соответствии с одним аспектом.
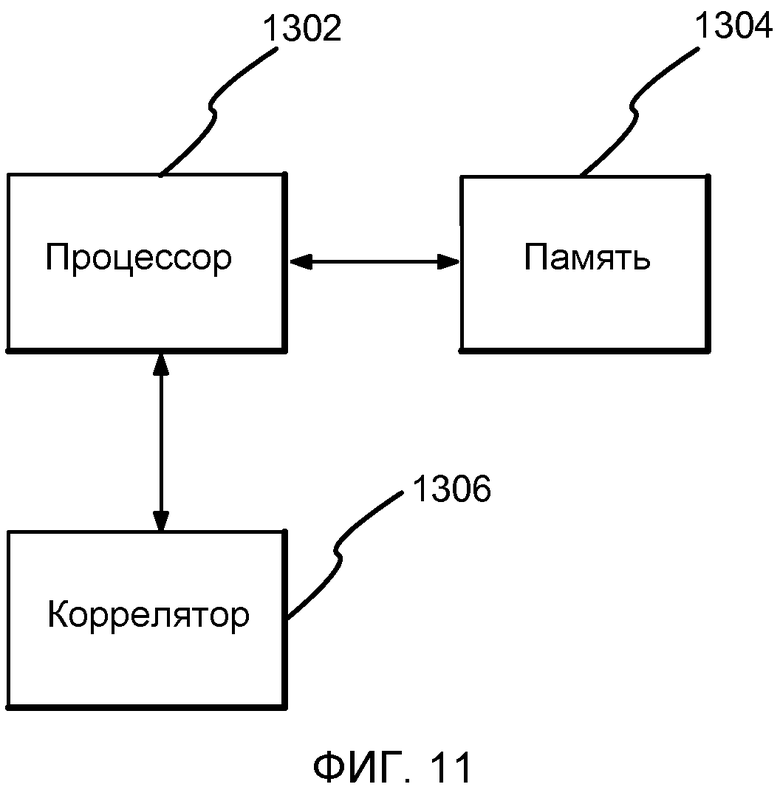
Фиг. 11 является схематичным чертежом системы для обработки сигналов для определения местоположения позиции в соответствии с одним аспектом.
Фиг. 12 является схематичным чертежом станции абонента в соответствии с одним аспектом.
Сущность изобретения
В одном аспекте, привязка по времени, связанная с первым сигналом, получаемым в опорном местоположении от первого передатчика, получается на основании, по меньшей мере частично, привязки по времени, связанной со вторым сигналом, принятым в опорном местоположении от второго передатчика. В другом аспекте, привязка во времени, связанная с первым сигналом, получается на основании, по меньшей мере частично, оценки разности между первым расстоянием до первого передатчика от опорного местоположения и вторым расстоянием до второго передатчика от опорного местоположения.
Детальное описание
Ссылки в описании на «один пример», «один признак», «пример» или «признак» означает, что конкретный признак, структура или отличительная особенность, описанная в отношении признака и/или примера, включена в, по меньшей мере, один признак и/или пример заявленного предмета. Соответственно, наличие фразы «в одном примере», «пример», «в одном признаке» или «признак» в различных местах данного описания не обязательно целиком относится к одному и тому же признаку и/или примеру. Более того, конкретные признаки, структуры или отличительные особенности могут быть объединены в одном или более примерах и/или признаках.
Описанные методологии могут быть реализованы различными средствами в зависимости от применений в соответствии с конкретными признаками и/или примерами. Например, такие методологии могут быть реализованы в аппаратном обеспечении, встроенном программном обеспечении, программном обеспечении и/или в их сочетании. При реализации в аппаратном обеспечении, например, модуль обработки может быть реализован в одной или более проблемно-ориентированных интегральных микросхем (ASIC), цифровых сигнальных процессорах (DSP), устройствах цифровой сигнальной обработки (DSPD), программируемых логических устройствах (PED), программируемых вентильных матрицах (FPGA), процессорах, контроллерах, микроконтроллерах, микропроцессорах, электронных устройствах, прочих модулях устройств, разработанных для выполнения описанных здесь функций и/или их комбинаций.
Упоминаемые здесь «инструкции» относятся к выражениям, которые представляют собой одну или более логических операций. Например, инструкции могут быть «машиночитаемыми», будучи интерпретируемыми машиной для выполнения одной или более операций над одним или более объектами данных. Тем не менее, это является лишь примером инструкций, и заявленный предмет не ограничен в этом отношении. В другом примере, упоминаемые здесь инструкции могут относиться к закодированным командам, которые выполняются схемой обработки, имеющей набор команд, который включает в себя закодированные команды. Такая инструкция может быть закодирована с помощью машинного языка, воспринимаемого схемой обработки. Вновь, это является лишь примерами инструкции, и заявленный объект изобретения не ограничен в этом отношении.
Упоминаемый здесь «носитель данных» относится к носителям, способным содержать выражения, которые воспринимаются одной или более машиной. Например, носитель данных может содержать одно или более устройств хранения для хранения машиночитаемых инструкций и/или информации. Такие устройства хранения могут содержать любые из различных типов носителей, включая, например, магнитный, оптический или полупроводниковый носитель данных. Такие устройства хранения также могут содержать любой тип долговременных, кратковременных, временных или постоянных устройств из числа устройств памяти. Тем не менее, это всего лишь примеры носителей данных, и заявленный предмет не ограничен в этом отношении.
До тех пор, пока не утверждается обратное, как вытекающее из нижеследующего рассмотрения, принимается во внимание, что на протяжении данного описания использование таких определений, как «обработка», «вычисление», «подсчет», «выбор», «формирование», «разрешение», «запрет», «определение местоположения», «завершение», «идентификация», «инициирование», «детектирование», «получение», «размещение на ведущем устройстве», «сохранение», «представление», «оценка», «снижение», «связывание», «прием», «передача», «определение» и/или подобное, относится к действиям и/или процессам, которые могут выполняться вычислительной платформой, такой как компьютер, или подобным электронным вычислительным устройством, которое манипулирует и/или преобразует данные, представленные в виде физических электронных и/или магнитных величин и/или прочих физических величин, в таких компонентах вычислительной платформы, как процессоры, запоминающие устройства, регистры и/или прочие устройства хранения, передачи, приема и/или отображения информации. Такие действия и/или процессы могут выполняться вычислительной платформой под управлением машиночитаемых инструкций, хранящихся, например, на носителе данных. Такие машиночитаемые инструкции могут содержать, например, программное обеспечение или встроенное программное обеспечение, хранящееся на носителе данных, включенном в качестве части вычислительной платформы (например, включенном в качестве части схемы обработки или являющемся внешним по отношению к такой схеме обработки). Дополнительно, до тех пор, пока не утверждается обратное, процессы, описанные здесь в отношении блок схем или иначе, также могут выполняться и/или управляться целиком или частично такой вычислительной платформой.
Упоминаемый здесь «космический аппарат» (SV) относится к объекту, который способен передавать сигналы приемнику, находящемуся на поверхности земли. В одном конкретном примере, такой SV может быть выполнен в виде геостационарного спутника. В качестве альтернативы, SV может быть выполнен в виде спутника, движущегося по орбите и перемещающегося в относительно стационарной позиции на земле. Тем не менее, это всего лишь примеры SV, и заявленный предмет не ограничен в этом отношении.
Упоминаемое здесь «местоположение» относится к информации, связанной с местонахождением объекта или предмета в соответствии с опорной точкой. Здесь, например, такое местоположение может быть представлено в виде географических координат, таких как широта и долгота. В другом примере, такое местоположение может быть представлено в виде координат XYZ относительно центра земли. В еще одном примере, такое местоположение может быть представлено в виде адреса улицы, муниципалитета или прочей территории государственного разделения, почтового индекса и/или подобным. Тем не менее, это всего лишь примеры того, каким образом может быть представлено местоположение в соответствии с конкретными примерами, и заявленный предмет не ограничен в этом отношении.
Описанные здесь технологии определения и/или оценки местоположения могут использоваться для различных сетей беспроводной связи, таких как беспроводная региональная сеть радиосвязи (WWAN), беспроводная локальная сеть радиосвязи (WLAN), беспроводная персональная сеть радиосвязи (WPAN) и т.д. Понятия «сеть» и «система» здесь могут использоваться взаимозаменяемо. WWAN может быть сетью Множественного Доступа с Кодовым Разделением (CDMA), сетью Множественного доступа с Временным Разделением (TDMA), сетью Множественного Доступа с Частотным Разделением (FDMA), сетью Множественного Доступа с Ортогональным Частотным Разделением (OFDMA), сетью Множественного Доступа с Частотным Разделением и Одной Несущей (SC-FDMA) и т.д. Сеть CDMA может реализовывать одну или более технологий радиодоступа (RAT), такие как cdma2000, Широкополосный-CDMA (W-CDMA), называя хотя бы часть технологий радиодоступа. Здесь, cdma2000 может включать в себя технологии, реализованные в соответствии со стандартами IS-95, IS-2000 и IS-856. Сеть TDMA может реализовывать Глобальную Систему для Мобильной Связи (GSM), Улучшенную Цифровую Систему Мобильной Телефонной связи (D-AMPS) или некоторые другие RAT. GSM и W-CDMA описаны в документах консорциума, именуемого «Проектом Партнерства Третьего Поколения» (3GPP). Cdma2000 описан в документах консорциума, именуемого «Вторым Проектом Партнерства Третьего Поколения» (3GPP2). Документы 3GPP и 3GPP2 доступны публично. WLAN может, например, содержать сеть IEEE 802.11x, а WPAN может содержать сеть Bluetooth, IEEE 802.15x. Такие описанные здесь технологии определения местоположения также могут использоваться для любого сочетания WWAN, WLAN и/или WPAN.
В соответствии с примерами устройство и/или система может оценивать свое местоположение на основании, по меньшей мере частично, сигналов, принятых от SV. Конкретно, такое устройство и/или система могут получить измерения «псевдорасстояний», содержащие приблизительное значение расстояний между ассоциированными SV и приемником спутниковой навигации. В конкретном примере, такое псевдорасстояние может быть определено приемником, который имеет возможность обработки сигналов от одного или более SV как части Спутниковой Системы Позиционирования (SPS). Такая SPS может быть выполнена в виде, например, Глобальной Системы Позиционирования (GPS), Galileo, Glonass (ГЛОНАСС), называя некоторые, или любых SPS, которые будут разработаны в будущем. Для того чтобы определить свое местоположение, приемник спутниковой навигации может получать измерения псевдорасстояния до трех и более спутников, а также их позиции во время передачи. Зная орбитальные параметры SV, эти позиции могут быть вычислены для любого момента времени. Затем может быть определено измерение псевдорасстояния на основании, по меньшей мере частично, произведения времени прохождения сигнала от SV к приемнику и скорости света. В то время как описанные здесь технологии могут быть представлены в качестве реализаций определения местоположения в таких типах SPS, как GPS и/или Galileo, в качестве конкретных иллюстраций в соответствии с конкретными примерами должно быть понятно, что эти технологии также могут быть применены к прочим типам SPS и что заявленный предмет не ограничен в этом отношении.
Описанные здесь технологии могут использоваться с любой из различных SPS, включая, например, вышеупомянутые SPS. Более того, такие технологии могут использоваться с системами определения позиционирования, которые используют псевдоспутники или сочетание спутников и псевдоспутников. Псевдоспутники могут быть выполнены в виде наземных передатчиков, которые осуществляют широковещательную передачу кода PN или другого кода измерения расстояния (например, подобно сотовому сигналу GPS или CDMA), модулирующего сигнал несущей диапазона сверхвысоких частот (L-band) (или другой частоты), который может быть синхронизирован со временем GPS. Такому передатчику может быть присвоен уникальный код PN таким образом, чтобы дать возможность удаленному приемнику произвести идентификацию. Псевдоспутники полезны в ситуациях, при которых могут быть недоступны сигналы GPS от движущихся по орбите спутников, как, например, в тоннелях, шахтах, зданиях, городских каньонах или прочих закрытых зонах. Другая реализация псевдоспутников известна как радиомаяки. Подразумевается, что используемое здесь понятие «спутник» включает в себя псевдоспутники, эквиваленты псевдоспутников и возможные прочие объекты. Подразумевается, что используемое здесь понятие «сигналы SPS» включает в себя SPS-подобные сигналы от псевдоспутников или эквивалентов псевдоспутников.
Упоминаемая здесь «Глобальная Система Спутниковой Навигации» (GNSS) относится к SPS, содержащей SV, передающие синхронизированные сигналы навигации в соответствии с общим форматом сигнализации. Такая GNSS может содержать, например, созвездие SV на согласованных орбитах, чтобы передавать сигналы навигации в местоположения на обширной части поверхности Земли одновременно от множества SV в созвездии. SV, который является членом конкретного созвездия GNSS, как правило, передает сигналы навигации в формате, который является уникальным для конкретного типа GNSS. Соответственно, технологии для получения сигнала навигации, передаваемого SV из первой GNSS, могут изменяться для получения сигнала навигации, передаваемого SV из второй GNSS. В конкретном примере, несмотря на то что заявленный предмет не ограничен в этом отношении, должно быть понятно, что GPS, Galileo и Glonass, каждая, представляет собой GNSS, которая отличается от двух других названных SPS. Тем не менее, это всего лишь примеры SPS, связанных с отдельными GNSS, и заявленный предмет не ограничен в этом отношении.
В соответствии с одним признаком приемник навигации может получать измерение псевдорасстояния до конкретного SV на основании, по меньшей мере, частично, получения сигнала от конкретного SV, который закодирован с периодически повторяющейся последовательностью кода PN. Получение такого сигнала может содержать детектирование «временного сдвига кода», который привязан ко времени и ассоциированной точке в последовательности кода PN. В одном конкретном признаке, например, такой временной сдвиг кода может быть привязан к локально сформированному синхронизирующему сигналу и конкретному элементарному сигналу в последовательности кода PN. Тем не менее, это всего лишь пример того, каким образом может быть представлен временной сдвиг кода, и заявленный предмет не ограничен в этом отношении.
В соответствии с примером детектирование временного сдвига кода может предоставлять несколько неоднозначных кандидатов псевдорасстояний или гипотез псевдорасстояний в интервалах кода PN. Соответственно, приемник навигации может получать размеры псевдорасстояний до SV на основании, по меньшей мере частично, детектирования временного сдвига кода и разрешения неоднозначности в отношении выбора одной из гипотез псевдорасстояний в качестве «истинного» измерения псевдорасстояния до SV. Как отмечено выше, приемник навигации может оценить свое местоположение на основании, по меньшей мере частично, измерений псевдорасстояний, полученных от множества SV.
В одном конкретном примере, зная точную привязку по времени сигнала SPS, принятого от передатчика в зоне опорного местоположения, и зная с достаточной точностью расстояние от зоны опорного местоположения до передатчика, приемник может исключить ложные гипотезы псевдорасстояний, чтобы определить истинное измерение псевдорасстояния. Здесь, «привязка по времени» относится к связи между известным событием сигнала SPS, переданного от передатчика, и частью переданного сигнала SPS, принятого в текущий момент в зоне опорного местоположения. В конкретных примерах, проиллюстрированных ниже, сигнал SPS, переданный от передатчика, может быть связан с известным событием, таким как, например, начало дня, недели, часа. В одном аспекте, такое событие в сигнале SPS может быть маркировано информацией в сигнале данных, модулирующем сигнал SPS. Такая информация может содержать, например, конкретно известную последовательность символов кода и/или числовые значения. Посредством извлечения такой последовательности символов кода и/или числовых значений из принятых сигналов SPS приемник может получить привязку по времени, связанную с принятым сигналом SPS.
Фиг. 2 иллюстрирует схематичную диаграмму системы, которая выполнена с возможностью определять местоположение в приемнике посредством измерения псевдорасстояний до SV в соответствии с примером. Приемник в центре 166 опорного местоположения на поверхности 168 Земли может наблюдать и принимать сигналы от SV1 и SV2. Центр 166 опорного местоположения может быть известен, как находящийся внутри зоны 164 опорного местоположения, определенной, например, окружностью с радиусом около 10 км. Тем не менее, должно быть понятно, что это всего лишь пример того, каким образом может быть представлена неопределенность оцениваемого местоположения в соответствии с конкретным аспектом, и заявленный предмет не ограничен в этом отношении. В одном примере, зона 164 может содержать область охвата конкретной ячейки сотовой сети беспроводной связи в известном местоположении.
В соответствии с примером SV1 и SV2 могут быть членами различных групп (созвездий) GNSS. В конкретном примере, проиллюстрированном ниже, SV1 может быть членом созвездия GPS, в то время как SV2 может быть членом созвездия Galileo. Тем не менее, должно быть понятно, что это всего лишь пример того, каким образом приемник может принимать сигналы от SV, принадлежащих различным группам GNSS, и заявленный предмет не ограничен в этом отношении.
В одном конкретном альтернативном варианте, первый и второй SV могут быть из созвездия GPS, в то время как, по меньшей мере, один из двух SV выполнен с возможностью передавать сигнал L1C (сигнал с модуляцией типа бинарного смещения несущей с параметрами (1,1) в диапазоне L1=1575,42 МГц). Подобно сигналу навигации от SV системы Galileo, сигнал навигации L1C может содержать сигнал, кодированный как каналом пилот-сигнала, так и каналом данных. Периодическое повторение последовательности кода PN в L1C может быть с продолжительностью 10 мс, что может отличаться от периодичности системы Galileo с продолжительностью 4 мс. Соответственно, должно быть понятно, что хотя рассматриваемые здесь конкретные примеры могут относиться к использованию SV из созвездий Galileo и GPS, такие технологии могут быть также применимы к прочим примерам, использующим два SV созвездия GPS, при этом, по меньшей мере, один из SV выполнен с возможностью передавать сигнал L1C. Вновь, это всего лишь примеры конкретных сигналов, которые могут приниматься от SPS в приемнике в зоне опорного местоположения, и заявленный предмет не ограничен в этом отношении.
В соответствии с примером приемник в зоне 164 опорного местоположения может обмениваться информацией с прочими устройствами, такими как, например, сервер (не показан), через линию беспроводной связи в, например, сети спутниковой связи или наземной сети беспроводной связи. В одном конкретном примере, такой сервер может передавать приемнику сообщения поддержки получения (AA), содержащие информацию, используемую приемником для обработки сигналов, принятых от SV, и/или получения измерений псевдорасстояния. В качестве альтернативы, такие сообщения AA могут предоставляться из информации, хранящейся локально в памяти приемника. Здесь такая хранящаяся локально информация может быть загружена в локальную память из устройства съемной памяти и/или получена из принятого ранее от сервера сообщения AA, в качестве нескольких примеров. В конкретном примере, сообщения AA могут содержать такую информацию, как, например, информация, указывающая местоположения SV1 и SV2, оценка местоположения центра 166 опорного местоположения, неопределенность, связанная с оцененным опорным местоположением, оценка текущего времени и/или подобное. Такая информация, указывающая позиции SV1 и SV2, может содержать информацию эфемерид и/или информацию календаря. Как отмечено ниже в соответствии с конкретными примерами, приемник может оценить позиции SV1 и SV2 на основании, по меньшей мере, частично, таких эфемерид и/или календаря и грубой оценки времени. Такая полученная путем оценки позиция SV может содержать, например, полученный путем оценки азимутальный угол относительно исходного направления и угол подъема относительно горизонта Земли в центре 166 опорного местоположения и/или координаты XYZ относительно центра земли.
Используя информацию, указывающую местоположения SV1 и SV2, и оценку местоположения центра 166 опорного местоположения, приемник может оценить первое расстояние от центра 166 опорного местоположения до SV1 и оценить второе расстояние от центра 166 опорного местоположения до SV2. Здесь следует обратить внимание, что, если первое расстояние больше второго расстояния, сигнал SPS, передаваемый от SV1, распространяется дольше, чтобы достигнуть центра 166 опорного местоположения, чем сигнал SPS, передаваемый от SV2. Аналогично, если второе расстояние больше первого расстояния, сигнал SPS, передаваемый от SV2, распространяется дольше, чтобы достигнуть центра 166 опорного местоположения, чем сигнал SPS, передаваемый от SV1.
В одном конкретном примере, сигнал SPS, передаваемый от SV, синхронизирован с известными периодами и/или событиями во времени, такими как, например, начало конкретного часа, дня, недели, месяца, в качестве некоторых примеров. В течение таких периодов и/или событий SV может модулировать передаваемый сигнал SPS информацией, чтобы маркировать такой период и/или событие. В SV, который является членом созвездия GPS, например, такая информация может предоставляться в сигнале данных в качестве последовательности значений и/или символов, передаваемых в символьном или битовом интервале продолжительностью 20 мс. В SV, который является членом созвездия Galileo, например, такая информация может предоставляться в канале данных, кодированных по алгоритму Витерби скорости ½ с длительностями символов 4 мс. Тем не менее, должно быть понятно, что это всего лишь примеры того, каким образом может использоваться информация в сигнале SPS, чтобы маркировать периоды и события, и заявленный предмет не ограничен в этом отношении.
После приема сигнала SPS с информацией, маркирующей известный период и/или событие, приемник может получить привязку по времени в отношении этого конкретного сигнала SPS и/или передатчика, передающего принятый сигнал SPS. В конкретном примере, в том случае, если такой сигнал SPS передается от SV из созвездия GPS, такой приемник может декодировать информацию в символьных и/или битовых интервалах длительностью 20 мс сигнала данных, маркирующего известный период и/или событие. Если такой сигнал SPS передается от SV в созвездии Galileo, например, такой приемник может декодировать информацию в канале данных, кодированных, например, по алгоритму Витерби скорости ½.
В одном конкретном аспекте, конкретное известное событие и/или период, связанные с сигналом SPS, передаваемым от первого передатчика, могут быть синхронизированы с конкретным известным событием и/или периодом сигнала SPS, передаваемого от второго передатчика. Например, конкретное событие в сигнале GPS, передаваемом от SV1, такое как переход между символьными и/или битовыми интервалами в сигнале данных, модулирующем сигнал GPS, может быть синхронизирован с конкретным событием сигнала Galileo, передаваемым от SV2, таким как переход между интервалами временного сдвига кода длительностью 4,0 мс и/или интервалами символа, кодированного по алгоритму Витерби скорости ½ длительностью 4,0 мс в канале данных.
Как проиллюстрировано в блок-схеме на Фиг. 3 в соответствии с конкретным признаком, привязка по времени, полученная из первого сигнала SPS, принятого от первого передатчика, может быть использована для получения привязки по времени второго сигнала SPS, принятого в зоне опорного местоположения от второго передатчика. В блоке 202 приемник в зоне опорного местоположения может получить первую привязку по времени, связанную с первым сигналом SPS, принятым от первого передатчика, такого как, например, передатчик, размещенный на SV. Здесь, например, такой приемник может декодировать и/или демодулировать информацию из первого сигнала SPS, ассоциированного или идентифицирующего конкретное известное событие и/или период во времени.
В качестве альтернативы, приемник может использовать способы корреляции данных, чтобы точно сделать вывод о привязке по времени из принятого сигнала SPS. В том случае, если, например, мощность сигнала достаточно низкая, приемник не сможет точно демодулировать отдельные биты данных из сигнала данных, модулирующего принятый сигнал SPS. Здесь приемник может коррелировать известные комбинации в принятом сигнале SPS. При достаточном числе успешных корреляций с принятым сигналом SPS приемник может определить и/или извлечь привязку по времени, связанную с передатчиком, передающим принимаемый сигнал SPS. В одном варианте осуществления, приемник может коррелировать известные комбинации с сигналом, принимаемым от одного и того же передатчика или различных передатчиков. Тем не менее, должно быть понятно, что это всего лишь примеры того, каким образом приемник может получить привязку по времени, связанную с принимаемым сигналом SPS, в соответствии с конкретными вариантами осуществления, и что заявленный предмет не ограничен в этом отношении.
В блоке 204 на Фиг. 3 приемник в опорном местоположении может получить второй сигнал SPS от второго передатчика. Такое получение второго сигнала SPS может содержать, например, детектирование границ временного сдвига кода PN, разделяющих повторяющиеся интервалы временного сдвига кода. Здесь приемник в зоне опорного местоположения может принимать второй сигнал SPS, кодированный с периодически повторяющимся кодом PN. Для того чтобы получить второй сигнал SPS, такой приемник может детектировать доплеровскую частоту и временной сдвиг кода в принятом сигнале. Такое детектирование временного сдвига кода может содержать, например, корреляцию смещенных по коду и/или во времени версий локально сформированной последовательности кода. В одном примере, в случае, где второй сигнал SPS передается от SV Galileo, например, такой временной сдвиг кода может быть выявлен внутри повторяющегося периода последовательности кода PN продолжительностью 4,0 мс. В качестве альтернативы, в том случае, когда второй сигнал SPS передается от SV GPS, такой временной сдвиг кода может быть выявлен внутри повторяющегося периода последовательности кода PN продолжительностью 1,0 мс. Тем не менее, это всего лишь пример того, каким образом может быть получен сигнал SPS, и заявленный предмет не ограничен в этом отношении.
В то время как Фиг. 3 показывает действия в блоке 202, происходящие до действий в блоке 204, понятно, что порядок таких действий может быть изменен на обратный в альтернативных реализациях. В других реализациях, действия, выполняемые в блоках 202 и 204, могут происходить параллельно.
В заключение в блоке 206 приемник может получить привязку по времени, связанную со вторым сигналом SPS, на основании, по меньшей мере частично, привязки по времени, связанной с первой привязкой по времени (полученной от первого сигнала SPS), и оценить разницу между расстоянием от опорного местоположения до первого передатчика и расстоянием от опорного местоположения до второго передатчика. Здесь посредством использования такой оцененной разности между первым и вторым расстояниями приемник может учесть различия между временем прохождения первого сигнала SPS от первого передатчика до опорного местоположения и временем прохождения второго сигнала SPS от второго передатчика до опорного местоположения. В то время как может существовать некоторая неопределенность в отношении точности привязки по времени, связанной с первым сигналом SPS, полученным приемником, ошибки, связанные с такой привязкой по времени, могут содержать постоянную ошибку времени, связанную с множеством передатчиков, передающих сигналы SPS, которые принимаются в опорном местоположении. Соответственно такая постоянная ошибка может быть устранена, например, при определении окончательного решения по навигации.
В одном конкретном примере, фактическая разница L (в единицах времени, например) может определять разницу между расстоянием до первого передатчика от опорного местоположения и расстоянием до второго передатчика от опорного местоположения. В целях иллюстрации, в качестве примера, приведена конкретная реализация, в которой оценка E[ L ] разницы определена для передатчиков, расположенных на SV1 и SV2, как показано на Фиг. 2. Тем не менее, должно быть понятно, что не требуется, чтобы передатчики, передающие сигналы SPS, располагались на SV, и что подход, рассматриваемый ниже, может быть применен для оценки разницы L для передатчиков, расположенных на других платформах, таких как, например, псевдоспутники. Здесь фактическая разница L между расстоянием до первого передатчика на SV1 от центра 166 опорного местоположения и расстоянием до второго передатчика на SV2 от центра 166 опорного местоположения может быть выражена следующим образом:
L =T2-T1
где:
T1 - задержка прохождения сигнала от SV1 в соответствии с тем, что измерено в опорном местоположении в заданный момент времени; и
T2 - задержка прохождения сигнала от SV2 в соответствии с тем, что измерено в опорном местоположении в заданный момент времени.
Для того чтобы получить привязку по времени, связанную со второй принимаемой SPS, например, приемник может определить оценку разницы L (в единицах времени, например) между расстоянием до первого передатчика от центра опорного местоположения и расстоянием до второго передатчика от центра опорного местоположения в соответствии с зависимостью (1) следующим образом:
Так как можно допустить, что ошибки, связанные с измерениями T2 и T1, могут быть по существу независимыми, выражение E[T2-T1] может быть аппроксимировано до выражения E[T2]-E[T1]. Здесь, в конкретном примере, значение для выражения E[T2]-E[T1] может быть известно и/или доступно приемнику через сообщение AA для конкретного момента времени. В качестве альтернативы, приемник может извлечь такое значение для выражения E[T2]-E[T1] для конкретного момента времени из информации, принятой в таком сообщении AA.
Оценка E[ L ] разницы L в соответствии с зависимостью (1) может быть преобразована до выражения, которое исключает ошибку τ синхронизатора приемника, в соответствии со следующим:
где
c - скорость света;
τ - систематическая погрешность генератора тактового сигнала приемника
RSV1 - оценка расстояния до SV1 от центра опорного местоположения; и
RSV2 - оценка расстояния до SV2 от центра опорного местоположения.
Здесь должно быть обращено внимание, что значение для оценки E[ L ] разницы может быть выражено в единицах как линейной длины, так и времени, а преобразование между единицами в таком выражении для значения E[ L ] может быть предоставлено скоростью света, выраженной в соответствующих единицах. Соответственно, должно быть понятно, что такое значение для оценки E[ L ] разницы может быть выражено взаимозаменяемо как в единицах времени, так и в единицах линейной длины, не отклоняясь от заявленного предмета.
В соответствии с конкретным примером блок 206 может вычислять оценку разницы между расстоянием («RSV1») от центра 166 опорного местоположения до SV1 и расстоянием («RSV2») от центра 166 опорного местоположения до SV2. Здесь блок 206 может получать информацию AA из одного или более сообщений AA, указывающую, например, оценки местоположений SV1 и SV2 в координатах XYZ относительно центра земли в добавление к оценке координат XYZ относительно центра земли для центра 166 опорного местоположения. Используя такие координаты XYZ относительно центра земли, блок 206 может вычислить евклидовы расстояния для RSV1 и RSV2.
В соответствии с тем, что проиллюстрировано ниже с конкретным примером, приемник, находящийся в опорном местоположении, может определить привязку по времени по первому сигналу SPS, передаваемому от первого передатчика, получаемому в опорном местоположении, и получить второй сигнал SPS, передаваемый от второго передатчика. В конкретном случае, такой приемник может дополнительно определить привязку по времени по второму полученному сигналу SPS на основании, по меньшей мере частично, привязки по времени, связанной с первым полученным сигналом SPS, если односторонняя неопределенность, связанная с оценкой E[ L ] разницы, меньше ½ периода повторения информации во втором полученном сигнале SPS.
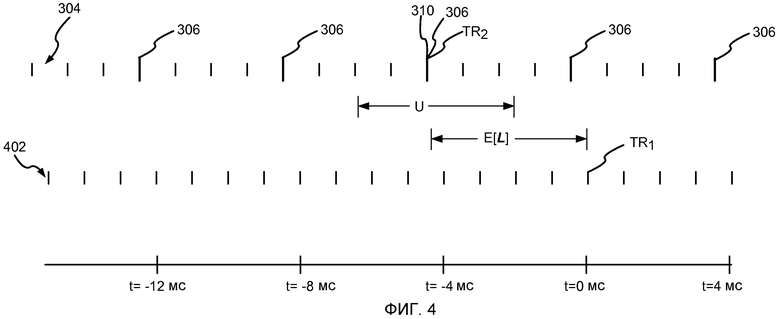
Фиг. 4-8 иллюстрируют конкретные примеры того, каким образом привязка по времени первого сигнала SPS, принятого от первого передатчика в опорном местоположении, может использоваться для получения второй привязки по времени второго сигнала SPS, передаваемого от второго передатчика и получаемого в опорном местоположении. Здесь привязки по времени первого и второго сигналов SPS могут быть связаны посредством оценки E[ L ] разницы. В конкретных проиллюстрированных примерах привязка TR1 по времени получена для первого сигнала SPS, переданного первым SV, и произвольно маркирована в момент времени t =0. Привязка TR1 по времени также синхронизирована с конкретным событием в полученном втором сигнале SPS, переданном вторым SV. В целях иллюстрации конкретных примеров, расстояние от опорного местоположения до первого SV больше расстояния от опорного местоположения до второго SV. Соответственно, привязка TR1 по времени, принятая в момент времени t =0, связана и/или синхронизирована с событием и/или периодом полученного второго сигнала SPS в прошлом на величину L . Тем не менее, должно быть понятно, что в других вариантах осуществления расстояние от опорного местоположения до первого SV может быть меньше или равно расстоянию от опорного местоположения до второго SV, так что привязка по времени в принятом первом сигнале SPS связана и/или синхронизирована с событием и/или периодом полученного второго сигнала SPS в будущем на величину L .
В конкретном примере на Фиг. 4 первый сигнал 302 SPS, переданный первым SV из созвездия GPS, принят и получен в опорном местоположении, в то время как второй сигнал 304 SPS, переданный вторым SV из созвездия Galileo, получен в опорном местоположении. Привязка TR1 по времени, связанная с сигналом 302 SPS, получена в момент времени, маркированный произвольно как t =0. Сигнал 304 SPS содержит интервалы кода PN длительностью 4,0 мс, которые разделены границами 306, которые известны, как только получен сигнал. В одном случае, привязка TR1 по времени может быть синхронизирована с конкретной границей 306, разделяющей интервалы кода PN длительностью 4,0 мс. Как только TR1 синхронизирована с границей 306 в сигнале 304 SPS, при двусторонней зоне U неопределенности в оценке E[ L ], которая меньше 4,0 мс, приемник может определить, что привязка TR2 по времени сигнала 304 SPS находится на границе 310, разделяющей интервалы кода PN длительностью 4,0 мс в сигнале 304 SPS.
Должно быть отмечено, что в альтернативных реализациях, первый сигнал 302 SPS, в конкретном примере выше по Фиг. 4, может передаваться первым SV из созвездия Galileo или другого созвездия GNSS, не отклоняясь от заявленного предмета. В другой альтернативной реализации, второй сигнал 304 может передаваться вторым SV из другого созвездия GNSS, у которого структура сигнала подобна структуре сигнала Galileo, такой как, например, сигнал L1C в созвездии GPS. Вновь, это всего лишь альтернативные реализации, и заявленный предмет не ограничен в этом отношении.
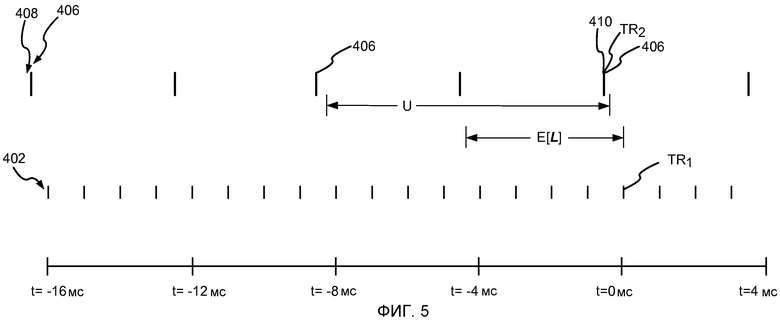
В конкретном примере на Фиг. 5 первый сигнал 402 SPS, передаваемый первым SV из созвездия GPS, принят и получен в опорном местоположении, в то время как второй сигнал 408 SPS, передаваемый вторым SV из созвездия Galileo, получен в опорном местоположении. В этом конкретном примере, в добавление к получению сигнала 402 SPS, приемник может иметь полностью декодированный канал данных, модулирующий сигнал 408 SPS, для определения границ 406 между 8-мс данными и/или значениями, кодированными по алгоритму Витерби скорости ½. Вновь, привязка TR1 по времени, связанная с сигналом 402 SPS, получена в момент времени, маркированный произвольно как t =0. Однако привязка TR1 по времени синхронизирована с конкретной границей 406, разделяющей 8-мс данные или значения, кодированные по алгоритму Витерби скорости ½, в декодированном канале данных. Соответственно, как проиллюстрировано на Фиг. 5, при двусторонней зоне U неопределенности в оценке E[ L ], которая меньше 8,0 мс, приемник может определить, что привязка TR2 по времени сигнала 408 SPS находится на границе 410, разделяющей 8-мс данные и/или значения, кодированные по алгоритму Витерби скорости ½ в канале данных, модулирующем сигнал 408 SPS.
Должно быть отмечено, что в альтернативной реализации, первый сигнал 402 SPS в конкретном примере выше на Фиг. 5 может передаваться первым SV из созвездия Galileo или другого созвездия GNSS, не отклоняясь от заявленного предмета. В другой альтернативной реализации, второй сигнал 408 может передаваться вторым SV из другого созвездия GNSS, у которого структура сигнала подобна структуре сигнала Galileo, такой как, например, сигнал L1C в созвездии GPS. Вновь, это всего лишь альтернативные реализации, и заявленный предмет не ограничен в этом отношении.
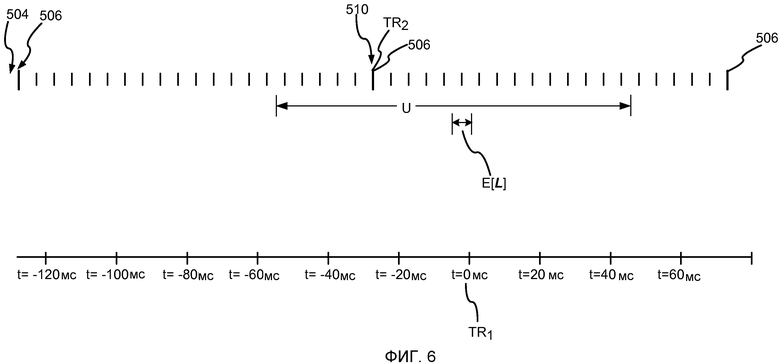
В конкретном примере на Фиг. 6 первый сигнал SPS (не показан), передаваемый первым SV из созвездия GPS, принят и получен в опорном местоположении, в то время как сигнал 504 SV, передаваемый вторым SV из созвездия Galileo, получен в опорном местоположении. В этом конкретном примере, в добавление к получению сигнала 504 SPS, приемник может иметь декодированный канал пилот-сигнала, содержащий последовательность кода длительностью 100 мс, модулирующую сигнал 504 SPS, чтобы определить границы 506 между интервалами последовательности кода длительностью 100 мс. Вновь, привязка TR1 по времени, связанная с первым сигналом SPS, получена в момент времени, маркированный произвольно как t =0. Однако привязка TR1 по времени синхронизирована с конкретной границей 506, разделяющей 100-мс последовательности кода декодированного канала пилот-сигнала. Соответственно, как проиллюстрировано на Фиг. 6, при двусторонней зоне U неопределенности в оценке E[ L ], которая меньше 100 мс, приемник может определить, что привязка TR2 по времени сигнала 504 SPS находится на границе 510, разделяющей повторяющиеся периоды длительностью 100 мс.
Должно быть отмечено, что в альтернативной реализации, первый сигнал SPS (не показан) в конкретном примере выше по Фиг. 6 может передаваться первым SV из созвездия Galileo или другого созвездия GNSS, не отклоняясь от заявленного предмета. В другой альтернативной реализации, второй сигнал 504 SV может передаваться вторым SV из другого созвездия GNSS, у которого структура сигнала подобна структуре сигнала Galileo, такой как сигнал L1C в группе GPS. Вновь, это всего лишь альтернативные реализации, и заявленный предмет не ограничен в этом отношении.
В конкретном примере по Фиг. 7 первый сигнал 604 SPS, передаваемый первым SV из созвездия Galileo, принят и получен в опорном местоположении, в то время как сигнал 602 SPS, передаваемый вторым SV из созвездия GPS, получен в опорном местоположении. Привязка TR1 по времени, связанная с сигналом 604 SPS, получена в момент времени, маркированный произвольно как t =0. Соответственно, привязка TR1 по времени синхронизирована с конкретной границей между интервалами кода PN полученного сигнала 602 длительностью 1,0 мс. Соответственно, как проиллюстрировано на Фиг. 7, при двусторонней зоне U неопределенности в оценке E[ L ], которая меньше 1,0 мс, приемник может определить, что привязка TR2 по времени сигнала 602 SPS находится на конкретной границе, разделяющей интервалы кода PN сигнала 602 SPS длительностью 1,0 мс.
Должно быть отмечено, что в альтернативной реализации, первый сигнал 604 SPS в конкретном примере по Фиг. 7 может передаваться первым SV из созвездия GPS или другого созвездия GNSS, не отклоняясь от заявленного предмета.
В конкретном примере по Фиг. 8 первый сигнал 804 SPS, передаваемый первым SV из созвездия Galileo, принят и получен в опорном местоположении, в то время как второй сигнал 802 SPS, передаваемый вторым SV из созвездия GPS, получен в опорном местоположении. Привязка TR1 по времени, связанная с сигналом 804 SPS, получена в момент времени, маркированный произвольно как t =0. Дополнительно, привязка TR1 по времени синхронизирована с конкретным «краем бита», разделяющим интервалы битов или символов длительностью 20,0 мс в сигнале 808 данных, модулирующем сигнал 802 SPS. Посредством получения сигнала 802 SPS и определения или идентификации границы края битов, разделяющей 20-мс интервалы битов или символов в сигнале 802 SPS, показанной местоположениями 810 краев битов, приемник может определить, что привязка по времени TR2 сигнала 802 SPS находится на конкретном краю бита из краев 810 битов, если двусторонняя зона U неопределенности в оценке E[ L ] меньше 20,0 мс.
Должно быть отмечено, что в альтернативной реализации, первый сигнал 804 SPS в конкретном примере по Фиг. 8 может передаваться первым SV из созвездия GPS или другого созвездия GNSS, не отклоняясь от заявленного предмета.
В соответствии с примером, хотя заявленный предмет не ограничен в этом отношении, точность оценки E[ L ] разницы основывается, по меньшей мере частично, на величине или степени неопределенности, связанной с оценкой зоны опорного местоположения. В конкретном примере по Фиг. 2, вновь в целях иллюстрации конкретного признака, односторонняя неопределенность p в оценке E[ L ] разницы в отношении SV1 и SV2 может определяться в соответствии с зависимостью (2) следующим образом:
где:
с - скорость света
A1 - оцененный угол азимута SV1 из центра опорного местоположения;
A2 - оцененный угол азимута SV2 из центра опорного местоположения;
E1 - оцененный угол возвышения SV1 из центра опорного местоположения;
E2 - оцененный угол возвышения SV2 из центра опорного местоположения; и
Punc - односторонняя неопределенность в зоне опорного местоположения в единицах длины.
Здесь должно быть принято во внимание, что двусторонняя зона U неопределенности, как проиллюстрировано на Фиг. 4-8 выше, может быть получена из односторонней неопределенности p как U =E[ L ]+/- p .
В соответствии с примером SV, наблюдаемый приемником (например, как указано в сообщении AA), может быть связан с конкретным набором параметров интервала поиска, определяющим двумерную область гипотез временного сдвига кода и доплеровских частот для поиска SV. В одной реализации, проиллюстрированной на Фиг. 9, параметры интервала поиска для SV содержат размер WIN_SIZECP интервала поиска временного сдвига кода, центр WIN_CENTCP интервала временного сдвига кода, размер WIN_SIZEDOPP интервала поиска Доплера и центр WIN_CENTDOPP интервала Доплера. В случае когда объект, местоположение которого определяется, является станцией абонента в системе беспроводной связи, совместимой с IS-801, эти параметры могут быть указаны сообщением AA, предоставленным станции абонента от PDE.
Двумерное пространство поиска для SV, проиллюстрированное на Фиг. 9, показывает, что ось временного сдвига кода является горизонтальной осью, а ось доплеровских частот является вертикальной осью, но это присвоение является произвольным и может быть изменено на обратное. Центр интервала поиска временного сдвига кода именуется как WIN_CENTCP, а размер интервала поиска временного сдвига кода именуется как WIN_SIZECP. Центр интервала поиска доплеровских частот именуется как WIN_CENTDOPP, а размер интервала поиска доплеровских часто именуется как WIN_SIZEDOPP.
Вслед за получением первого сигнала от первого SV в соответствии с примером WIN_CENTCP и WIN_SIZECP для получения второго сигнала от второго SV могут определяться на основании, по меньшей мере частично, временного сдвига кода, выявленного в первом полученном сигнале, оценки местоположения приемника и информации, описывающей местоположения для первого и второго SV для конкретного момента времени t. В соответствии с тем, что проиллюстрировано на Фиг. 10, пространство поиска для получения второго сигнала может быть разбито на множество сегментов 1202a, 1202b, 1202c, каждый из которых отличается диапазоном доплеровских частот и диапазоном временных сдвигов кода.
В соответствии с примером диапазон временных сдвигов кода, характеризующий сегмент, может быть равен емкости канала коррелятора для поиска сегмента за один проход канала. В одном конкретном примере, где емкость канала составляет тридцать два элементарных сигнала, например, диапазон временных сдвигов кода, характеризующий сегмент, может составлять тридцать два элементарных сигнала, но должно быть принято во внимание, что возможны и другие примеры.
Сегменты могут быть выполнены с перекрытием на предписанное число элементарных сигналов, чтобы избежать пропуска пиков, которые появляются на границах сегмента, как проиллюстрировано на Фиг. 10. Здесь, концовка сегмента 1202a перекрывает начальную часть сегмента 1202b на A элементарных сигналов, а концовка сегмента 1202b подобно перекрывает начальную часть сегмента 1202c на A элементарных сигналов. Из-за переполнения, вызванного этим перекрытием, эффективный диапазон временных сдвигов кода, представленный сегментом, может быть меньше емкости канала. Если, например, перекрытие составляет четыре элементарных сигнала, эффективный диапазон временных сдвигов кода, представляемый сегментом, может быть из двадцати восьми элементарных сигналов.
На Фиг. 11 проиллюстрирована, в соответствии с конкретным примером, система для получения периодически повторяющихся сигналов от SV. Тем не менее, это всего лишь пример системы, которая выполнена с возможностью получать такие сигналы в соответствии с конкретным примером, и могут использоваться другие системы, не отклоняясь от заявленного предмета. Как проиллюстрировано на Фиг. 11 в соответствии с конкретным примером, такая система может быть выполнена в виде вычислительной платформы, которая включает в себя процессор 1302, память 1304 и коррелятор 1306. Коррелятор 1306 может быть выполнен с возможностью формировать корреляционные функции из сигналов, предоставленных приемником (не показан) для обработки процессором 1302 либо непосредственно, либо через память 1304. Коррелятор 1306 может быть реализован в аппаратном обеспечении, программном обеспечении или сочетании аппаратного и программного обеспечения. Тем не менее, это всего лишь примеры того, каким образом коррелятор может быть реализован в соответствии с конкретными аспектами, и заявленный предмет не ограничен в этом отношении.
В соответствии с примером память 1304 может хранить машиночитаемые инструкции, доступ к которым и выполнение производится процессором 1302, чтобы предоставить по меньшей мере часть вычислительной платформы. Здесь процессор 1302 в сочетании с такими машиночитаемыми инструкциями может быть выполнен с возможностью выполнять весь или часть процесса 200, проиллюстрированного выше в отношении Фиг. 3. В конкретном примере, несмотря на то что заявленный предмет не ограничен в этом отношении, процессор 1302 может управлять коррелятором 1306, чтобы производить поиск сигналов определения позиции, как проиллюстрировано выше, и получать измерения из корреляционных функций, сформированных коррелятором 1306.
Согласно Фиг. 12, радиоприемопередатчик 1406 может быть выполнен с возможностью модулировать сигнал несущей RF информацией базовой полосы, такой как голос или данные, на несущей RF и демодулировать подвергнутую модуляции несущую RF, чтобы получить такую информацию базовой полосы. Антенна 1410 может быть выполнена с возможностью передавать подвергнутую модуляции несущую по линии беспроводной связи и принимать подвергнутую модуляции несущую RF по линии беспроводной связи.
Процессор 1408 базовой полосы может быть выполнен с возможностью предоставлять информацию базовой полосы от CPU 1402 к приемопередатчику 1406 для передачи по линии беспроводной связи. Здесь CPU 1402 может получать такую информацию базовой полосы от устройства ввода в пользовательском интерфейсе 1416. Процессор 1408 базовой полосы также может быть выполнен с возможностью предоставлять информацию базовой полосы от приемопередатчика 1406 к CPU 1402 для передачи через устройство вывода в пользовательском интерфейсе 1416.
Пользовательский интерфейс 1416 может содержать множество устройств для ввода или вывода пользовательской информации, такой как голос или данные. Такие устройства могут включать в себя, например, клавиатуру, экран дисплея, микрофон и громкоговоритель.
Приемник 1412 SPS (SPS Rx) может быть выполнен с возможностью принимать и демодулировать передачи от SV и предоставлять демодулированную информацию коррелятору 1418. Коррелятор 1418 может быть выполнен с возможностью получать корреляционные функции из информации, предоставленной приемником 1412. Для заданного кода PN, например, коррелятор 1418 может формировать корреляционные функции, определенные для диапазона временных сдвигов кода, чтобы обеспечить интервал поиска временного сдвига кода, и для диапазона гипотез доплеровских частот, как проиллюстрировано выше. Как таковая, индивидуальная корреляция может выполняться в соответствии с определенными параметрами когерентного или некогерентного накопления.
Коррелятор 1418 также может быть выполнен с возможностью получать корреляционные функции в отношении пилот-сигнала из информации, относящейся к пилот-сигналам, обеспечиваемым приемопередатчиком 1406. Эта информация может использоваться абонентской станцией, чтобы получать услуги беспроводной связи.
Декодер 1420 канала может быть выполнен с возможностью декодировать символы канала, принимаемые от процессора 1408 канала прямой передачи, в биты соответствующего источника. В одном примере, где символы канала содержат сверточно кодированные символы, такой декодер канала может содержать декодер Витерби. Во втором примере, где символы канала содержат последовательные или параллельные конкатенации сверточных кодов, декодер 1420 канала может содержать турбо декодер.
Память 1404 может быть выполнена с возможностью хранить машиночитаемые инструкции, которые исполняются, чтобы выполнять один или более процессов, примеров, реализаций или их примеров, которые были описаны или предложены. CPU 1402 может быть выполнен с возможностью получать доступ и исполнять такие машиночитаемые инструкции. Посредством исполнения таких машиночитаемых инструкций CPU 1402 может управлять коррелятором 1418, чтобы выполнять выдержки, используемые конкретными режимами поиска в блоках 204 и 220, анализировать корреляционные функции GPS, предоставленные коррелятором 1418, получать результаты измерений из их пиков и определять, является ли оценка местоположения достаточно точной. Тем не менее, это всего лишь примеры задач, которые могут выполняться CPU в конкретном аспекте, и заявленный предмет не ограничен в этом отношении.
В конкретном примере, CPU 1402 на станции абонента может оценивать местоположение станции абонента на основании, по меньшей мере частично, сигналов, принятых от SV в соответствии с тем, что проиллюстрировано выше. CPU 1402 также может быть выполнен с возможностью определять диапазон поиска кода для получения второго принятого сигнала на основании, по меньшей мере частично, временного сдвига кода, выявленного в первых принятых сигналах, как проиллюстрировано выше в соответствии с конкретными примерами. Тем не менее, должно быть понятно, что это всего лишь примеры систем для оценки местоположения на основании, по меньшей мере частично, измерений псевдорасстояний, определения количественных оценок таких измерений псевдорасстояний и завершения процессов для повышения точности измерений псевдорасстояний в соответствии с конкретными аспектами и что заявленный предмет не ограничен в этом отношении.
Хотя выше было описано и проиллюстрировано то, что в настоящее время рассматривается как примеры признаков, специалистам в данной области техники должно быть понятно, что могут быть выполнены различные другие модификации и могут использоваться эквиваленты, не отступая от заявленного предмета. В добавление, многие модификации могут выполняться для того, чтобы приспособить конкретную ситуацию к идеям заявленного предмета, не отступая от главной описанной здесь идеи. По этой причине подразумевается, что заявленный предмет не должен ограничиваться конкретными раскрытыми примерами, при этом такой заявленный предмет также может включать в себя все аспекты, входящие в объем прилагаемой формулы изобретения и ее эквивалентов.





Изобретение относится к области радиотехники, а именно к получению привязок по времени, связанных с сигналами навигации, и может быть использовано в спутниковых системах позиционирования (SPS). Технический результат заключается в повышении точности позиционирования при относительно экономичном использовании ресурсов мощности и обработки. Для этого получают первую привязку по времени, связанную с первым сигналом, принятым в приемнике; вторую привязку по времени, связанную со вторым сигналом от второго передатчика, получают на основании первой привязки по времени и оцененной разницы между первым расстоянием до первого передатчика от приемника и вторым расстоянием до второго передатчика от приемника. При этом при получении второй привязки проводят проверку неопределенности, связанной с упомянутой оцененной разницей, заключающуюся в определении того, чтобы упомянутая неопределенность была меньше, чем пороговая величина, связанная с длительностью информации в упомянутом втором сигнале от второго передатчика, 5 н. и 37 з.п. ф-лы, 12 ил.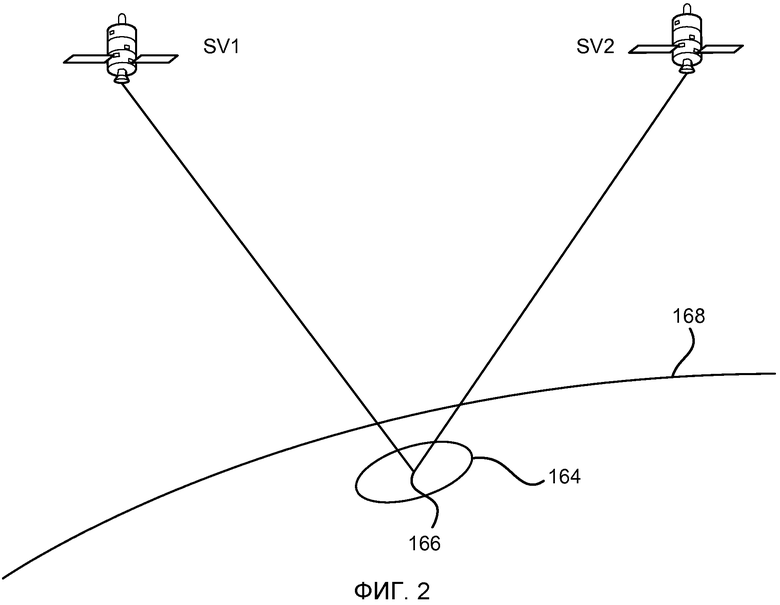
1. Способ получения привязки по времени для принимаемого сигнала SPS (спутниковой системы позиционирования), содержащий этапы, на которых:
получают первую привязку по времени, связанную с первым сигналом SPS, принятым в опорном местоположении от первого передатчика; и получают вторую привязку по времени, связанную со вторым сигналом SPS, полученным в упомянутом опорном местоположении от второго передатчика, на основании, по меньшей мере, частично, упомянутой первой привязки по времени и оцененной разницы между первым расстоянием до упомянутого первого передатчика от упомянутого опорного местоположения и вторым расстоянием до упомянутого второго передатчика от упомянутого опорного местоположения, в ответ на определение того, что неопределенность, связанная с упомянутой оцененной разницей, меньше, чем пороговая величина, связанная с длительностью информации в упомянутом втором сигнале SPS.
2. Способ по п.1, в котором упомянутые первый и второй передатчики размещены на соответствующих первом и втором космических аппаратах (SV), которые являются членами различных созвездий GNSS (Глобальная Система Спутниковой Навигации).
3. Способ по п.1, в котором упомянутый первый передатчик размещен на первом космическом аппарате (SV), который является членом созвездия GPS (Глобальная Система Позиционирования), а упомянутый второй передатчик размещен на втором SV, который является членом созвездия Galileo (Галилео).
4. Способ по п.3, в котором получение упомянутой второй привязки по времени, связанной с упомянутым вторым сигналом SPS, дополнительно содержит этапы, на которых:
детектируют границы по алгоритму Витерби скорости ½ в сигнале данных, модулирующем упомянутый второй сигнал SPS; и
определяют упомянутую вторую привязку по времени на основании, по меньшей мере, частично, упомянутой детектированной границы по алгоритму Витерби скорости ½.
5. Способ по п.3, в котором получение упомянутой второй привязки по времени, связанной с упомянутым вторым сигналом SPS, дополнительно содержит этапы, на которых:
детектируют границы в периодической последовательности кода, модулирующей упомянутый второй сигнал SPS; и
определяют упомянутую вторую привязку по времени на основании, по меньшей мере, частично упомянутых детектированных границ.
6. Способ по п.1, в котором упомянутый первый передатчик размещен на спутниковом аппарате (SV), который является членом созвездия Galileo, a упомянутый второй передатчик размещен на втором SV, который является членом созвездия GPS.
7. Способ по п.6, в котором получение упомянутой второй привязки по времени, связанной с упомянутым вторым сигналом SPS, дополнительно содержит этапы, на которых:
детектируют границы краевых битов в сигнале данных, модулирующем упомянутый сигнал SPS; и
определяют упомянутую вторую привязку по времени на основании, по меньшей мере, частично упомянутых детектированных границ краевых битов.
8. Способ по п.1, в котором упомянутый первый передатчик размещен на первом космическом аппарате (SV), который является членом созвездия GPS, а упомянутый сигнал SPS содержит сигнал L1C.
9. Способ по п.1, в котором упомянутый второй передатчик расположен на спутниковом аппарате (SV), который является членом созвездия GPS, a упомянутый первый сигнал SPS содержит сигнал L1C.
10. Способ по п.1, дополнительно содержащий этап, на котором определяют, меньше ли упомянутая неопределенность, связанная с упомянутой оцененной разницей, чем упомянутая пороговая величина, связанная с упомянутой длительностью информации в упомянутом втором сигнале SPS.
11. Способ по п.10, в котором упомянутая неопределенность определяется на основании, по меньшей мере частично односторонней неопределенности, связанной с упомянутым опорным местоположением.
12. Способ по п.10, в котором упомянутая неопределенность определяется на основании, по меньшей мере, частично, по меньшей мере, одного из оцененного азимутального угла до упомянутого первого передатчика из упомянутого опорного местоположения; оцененного азимутального угла до упомянутого второго передатчика из упомянутого опорного местоположения; оцененного угла возвышения до упомянутого первого передатчика из упомянутого опорного местоположения и/или оцененного угла возвышения до упомянутого второго передатчика из упомянутого опорного местоположения.
13. Способ по п.10, в котором упомянутая неопределенность представляет собой одностороннюю неопределенность, а упомянутое определение содержит:
определение, меньше ли упомянутая односторонняя неопределенность, чем половина упомянутого порогового значения.
14. Способ по п.10, в котором упомянутая неопределенность представляет собой двустороннюю неопределенность.
15. Способ по п.10, в котором упомянутая длительность информации основывается, по меньшей мере, частично на периоде повторения информации в упомянутом втором сигнале SPS.
16. Изделие для получения привязки по времени для принимаемого сигнала SPS, содержащее:
носитель данных, на котором сохранены машиночитаемые инструкции, исполняемые вычислительной платформой для того, чтобы:
получать первую привязку по времени, связанную с первым сигналом SPS, принятым в опорном местоположении от первого передатчика; и
получать вторую привязку по времени, связанную со вторым сигналом SPS, полученным в упомянутом опорном местоположении от второго передатчика на основании, по меньшей мере, частично упомянутой первой привязки по времени и оцененной разницы между первым расстоянием до упомянутого первого передатчика от упомянутого опорного местоположения и вторым расстоянием до упомянутого второго передатчика от упомянутого опорного местоположения, в ответ на определение того, что неопределенность, связанная с упомянутой оцененной разницей, меньше, чем пороговая величина, связанная с длительностью информации в упомянутом втором сигнале SPS.
17. Изделие по п.16, причем упомянутые первый и второй передатчики размещены на соответствующих первом и втором космических аппаратах (SV), которые являются членами различных созвездий GNSS.
18. Изделие по п.16, причем упомянутый первый передатчик размещен на первом космическом аппарате (SV), который является членом созвездия GPS, а упомянутый второй передатчик размещен на втором SV, который является членом созвездия Galileo.
19. Изделие по п.18, причем упомянутые инструкции дополнительно исполняются упомянутой вычислительной платформой для того, чтобы: детектировать границы по алгоритму Витерби скорости ½ в сигнале данных, модулирующем упомянутый второй сигнал SPS; и
определять упомянутую вторую привязку по времени на основании, по меньшей мере, частично упомянутой детектированной границы по алгоритму Витерби скорости ½.
20. Изделие по п.18, причем упомянутые инструкции дополнительно исполняются упомянутой вычислительной платформой для того, чтобы: детектировать границы в периодической последовательности кода, модулирующей упомянутый второй сигнал SPS; и
определять упомянутую вторую привязку по времени на основании, по меньшей мере, частично упомянутых детектированных границ.
21. Изделие по п.16, причем упомянутый первый передатчик размещен на спутниковом аппарате (SV), который является членом созвездия Galileo, a упомянутый второй передатчик размещен на втором SV, который является членом созвездия GPS.
22. Изделие по п.21, причем упомянутые инструкции дополнительно исполняются упомянутой вычислительной платформой для того, чтобы: детектировать границы краевых битов в сигнале данных, модулирующем упомянутый сигнал SPS; и
определять упомянутую вторую привязку по времени на основании, по меньшей мере, частично упомянутых детектированных границ краевых битов.
23. Изделие по п.16, причем упомянутый первый передатчик размещен на первом космическом аппарате (SV), который является членом созвездия GPS, а упомянутый сигнал SPS содержит сигнал L1C.
24. Изделие по п.16, причем упомянутый второй передатчик расположен на спутниковом аппарате (SV), который является членом сигнала GPS, a упомянутый первый сигнал SPS содержит сигнал L1C.
25. Изделие по п.16, причем упомянутая длительность информации основывается, по меньшей мере, частично на периоде повторения информации в упомянутом втором сигнале SPS.
26. Модуль абонента, содержащий:
приемник для приема сообщения поддержки получения (АА), содержащего информацию, указывающую местоположения первого и второго космических аппаратов (SV); и
процессор для
получения первой привязки по времени, связанной с первым сигналом SPS, принятым в опорном местоположении от первого передатчика; и
получения второй привязки по времени, связанной со вторым сигналом SPS, полученным в упомянутом опорном местоположении от второго передатчика на основании, по меньшей мере, частично упомянутой первой привязки по времени и оцененной разницы между первым расстоянием до упомянутого первого передатчика от упомянутого опорного местоположения и вторым расстоянием до упомянутого второго передатчика от упомянутого опорного местоположения, в ответ на определение того, что неопределенность, связанная с упомянутой оцененной разницей, меньше, чем пороговая величина, связанная с длительностью информации в упомянутом втором сигнале SPS.
27. Модуль абонента по п.26, в котором упомянутый приемник выполнен с возможностью приема упомянутого сообщения АА по наземной линии беспроводной связи.
28. Модуль абонента по п.26, причем упомянутые первый и второй передатчики размещены на соответствующих первом и втором космических аппаратах (SV), которые являются членами различных созвездий GNSS.
29. Модуль абонента по п.26, причем упомянутый первый передатчик размещен на первом космическом аппарате (SV), который является членом созвездия GPS, а упомянутый второй передатчик размещен на втором SV, который является членом созвездия Galileo.
30. Модуль абонента по п.29, в котором упомянутый процессор выполнен с возможностью детектирования границ по алгоритму Витерби скорости ½ в сигнале данных, модулирующем упомянутый второй сигнал SPS; и
определения упомянутой второй привязки по времени на основании, по меньшей мере, частично упомянутой детектированной границы по алгоритму Витерби скорости ½.
31. Модуль абонента по п.30, в котором упомянутый процессор выполнен с возможностью
детектирования границ в периодической последовательности кода, модулирующей упомянутый второй сигнал SPS; и
определения упомянутой второй привязки по времени на основании, по меньшей мере частично, упомянутых детектированных границ.
32. Модуль абонента по п.26, причем упомянутый первый передатчик размещен на спутниковом аппарате (SV), который является членом созвездия Galileo, а упомянутый второй передатчик размещен на втором SV, который является членом созвездия GPS.
33. Модуль абонента по п.32, в котором упомянутый процессор выполнен с возможностью
детектирования границ краевых битов в сигнале данных, модулирующем упомянутый сигнал SPS; и
определения упомянутой второй привязки по времени на основании, по меньшей мере, частично упомянутых детектированных границ краевых битов.
34. Модуль абонента по п.26, причем упомянутый первый передатчик размещен на первом космическом аппарате (SV), который является членом созвездия GPS, а упомянутый сигнал SPS содержит сигнал L1C.
35. Модуль абонента по п.26, причем упомянутый второй передатчик расположен на спутниковом аппарате (SV), который является членом созвездия GPS, а упомянутый первый сигнал SPS содержит сигнал L1C.
36. Модуль абонента по п.26, причем упомянутая длительность информации основывается, по меньшей мере, частично на периоде повторения информации в упомянутом втором сигнале SPS.
37. Система определения позиции, содержащая:
объект определения позиции (PDE) и
модуль абонента, выполненный с возможностью
приема сообщения поддержки получения (АА) от упомянутого PDE по наземной линии беспроводной связи, при этом упомянутое сообщение АА содержит информацию, указывающую местоположения первого и второго передатчиков;
оценивания разницы между первым расстоянием от опорного местоположения до упомянутого первого передатчика и вторым расстоянием от упомянутого опорного местоположения до упомянутого второго передатчика на основании, по меньшей мере, частично упомянутой информации;
получения первой привязки по времени, связанной с первым сигналом SPS, принятым в опорном местоположении от первого передатчика; и получения второй привязки по времени, связанной со вторым сигналом SPS, полученным в упомянутом опорном местоположении от упомянутого второго передатчика на основании, по меньшей мере, частично упомянутой первой привязки по времени и оцененной разницы между первым расстоянием до упомянутого первого передатчика от упомянутого опорного местоположения и вторым расстоянием до упомянутого второго передатчика от упомянутого опорного местоположения, в ответ на определение того, что неопределенность, связанная с упомянутой оцененной разницей, меньше, чем пороговая величина, связанная с длительностью информации в упомянутом втором сигнале SPS.
38. Система по п.37, в которой упомянутая длительность информации основывается, по меньшей мере, частично на периоде повторения информации в упомянутом втором сигнале SPS.
39. Устройство получения привязки по времени для принимаемого сигнала SPS, содержащее:
средство для получения первой привязки по времени, связанной с первым сигналом SPS, принятым в опорном местоположении от первого передатчика; и
средство для получения второй привязки по времени, связанной со вторым сигналом SPS, полученным в упомянутом опорном местоположении от второго передатчика, на основании, по меньшей мере, частично упомянутой первой привязки по времени и оцененной разницы между первым расстоянием до упомянутого первого передатчика от упомянутого опорного местоположения и вторым расстоянием до упомянутого второго передатчика от упомянутого опорного местоположения, в ответ на определение того, что неопределенность, связанная с упомянутой оцененной разницей, меньше, чем пороговая величина, связанная с длительностью информации в упомянутом втором сигнале SPS.
40. Устройство по п.39, в котором упомянутые первый и второй передатчики размещены на соответствующих первом и втором космических аппаратах (SV), которые являются членами различных созвездий GNSS.
41. Устройство по п.39, дополнительно содержащее:
средство для определения, меньше ли упомянутая неопределенность, связанная с упомянутой оцененной разницей, чем упомянутая пороговая величина, связанная с упомянутой длительностью информации в упомянутом втором сигнале SPS.
42. Устройство по п.39, в котором упомянутая длительность информации основывается, по меньшей мере, частично на периоде повторения информации в упомянутом втором сигнале SPS.
| WO 2008024939 A2, 28.02.2008 | |||
| РЕГУЛИРОВАНИЕ МОЩНОСТИ ПЕРЕДАЧИ ПО ИНФОРМАЦИОННОМУ КАНАЛУ ПРЯМОЙ ЛИНИИ СВЯЗИ | 2002 |
|
RU2320085C2 |
| EP 1160582 A2, 05.12.2001 | |||
| EP 1146349 A2, 17.10.2001 | |||
| Аналоговый перемножитель | 1984 |
|
SU1166143A1 |

