Настоящее изобретение относится к предсказанию эффективности системы спутниковой навигации.
Более конкретно, изобретение относится к способу для предсказания требований точности, непрерывности, целостности и доступности в системе спутниковой навигации, обеспеченной приемником GNSS (глобальная система спутниковой навигации), как определено в преамбуле пункта 1 формулы изобретения. В частности, настоящее изобретение является применимым к системам навигации для летательного аппарата относительно управления летательным аппаратом без помощи наземной радиосвязи на разных этапах полета: взлет, навигация в отдаленной области и в конечной области, заход на посадку, приземление. В настоящее время нет сертифицированных систем навигации, которые дают возможность выполнять операции захода на посадку и приземления только с помощью бортовых приемников без помощи наземной системы радиосвязи. Такие системы используются только для навигации в отдаленных областях и в ограниченных классах летательных аппаратов.
Было бы желательно расширить функциональные возможности систем спутниковой навигации на всех этапах полета, для того чтобы уменьшить эксплуатационные расходы наземных систем радиосвязи и дать возможность более эффективного подхода к управлению навигацией при подготовке к разработке способов навигации 4D.
Имеющиеся в настоящее время способы для предсказания эффективности приемника GNSS (или любой системы спутниковой навигации, независимо от поддерживающего созвездия) могут использоваться для выполнения моделирований для выбора наилучшего способа для обеспечения целостности процесса навигации, захода на посадку и приземления. Параметрами, которые могут быть использованы, чтобы управлять навигацией, и данными, необходимыми для безопасного выполнения операций захода на посадку и приземления, управляют непосредственно с помощью приемников GNSS нового поколения, установленных на борту летательного аппарата.
Целью этих способов моделирования является проверять, что эффективность приемников GNSS адекватна с точки зрения точности, доступности, целостности и непрерывности, чтобы гарантировать надежную воздушную навигацию на всех этапах полета. Эти четыре требования определены следующим образом (со ссылкой на ICAO, приложение 10):
точность: показатель разности между позицией, оцененной пользователем, и фактической позицией, в которой отсутствуют отказы; для оценки позиции в конкретном местоположении вероятность того, что погрешность позиции находится в пределах требуемой точности, должна быть, по меньшей мере, 95%;
целостность: показатель уверенности в правильности информации, предоставленной с помощью системы навигации; он включает в себя способность системы навигации генерировать предупредительные сигналы пользователям с течением времени, если система не должна быть использована для навигации; система навигации должна допускать ограничение погрешности в реальном времени в любых условиях работы; чтобы гарантировать, что погрешность позиции является допустимой, определяют ограничение предупредительного сигнала, представляющее максимальную погрешность позиции, которая может быть допустимой, чтобы работать в безопасных условиях, и погрешность позиции не должна превышать это ограничение предупредительного сигнала без оповещения в заданном интервале времени, определенном как “время до предупредительного сигнала”;
непрерывность: способность системы делать функцию навигации доступной во всем процессе полета при условии, что служба была доступна в начале процесса; непрерывность задают в понятиях риска непрерывности, который является вероятностью того, что процедура будет прервана при потере службы из-за незапрограммированных прерываний;
доступность: вероятность того, что функции навигации и обнаружение сбоя являются оперативными и что удовлетворяют требованиям точности, целостности и непрерывности.
Однако имеющиеся способы моделирования имеют недостаток аналитической связи между вышеупомянутыми требованиями и статистическими параметрами, такими как вероятность ложного предупредительного сигнала или вероятность пропущенного обнаружения, которые являются необходимыми, чтобы оценивать ограничения защиты приемника GNSS и соответствующей доступности во времени и в пространстве. Статистические параметры получают из планирования системы навигации, а ограничения защиты являются величинами, определенными на основании конструкции системы, которые не должны превышать соответствующие теоретические величины, связанные с системой, если операции навигации, захода на посадку и приземления должны выполняться безопасно.
Дополнительные ограничения современных способов моделирования обычно состоят из ограничения сценариев, которые могут быть смоделированы: эти сценарии представляют множество всех параметров, которые определяют рабочую ситуацию, например этап полета, используемый способ целостности (такой как RAIM (автономный контроль целостности), канал целостности Galileo, расширение на основе спутников), тип алгоритма RAIM, который может быть “моментальным снимком” или последовательным, а также другие параметры, которые более подробно определены ниже. Современные способы также основаны на одном созвездии, например созвездии GPS, используют только стандартный алгоритм “моментального снимка”, чтобы выполнять алгоритм RAIM для мониторинга системы навигации, и анализируют отказ только одного спутника. Кроме того, эти способы не обеспечивают никакую поддержку анализа эффектов ухудшения параметров системы, таких как сцинтилляция, помехи, или оценку результата “выхода из строя”, иначе говоря, нарушение работоспособности спутника из-за ESD (электростатический разряд) или потоков заряженных частиц, созданных с помощью явлений, происходящих на солнце.
Алгоритм “мгновенного снимка” основан на одном множестве измерений, иначе говоря, на данных системы, которые собраны одновременно. Это алгоритм является не оптимальным, в частности его эффективность ограничена, когда присутствуют требования вертикального управления.
Имеется другой алгоритм, известный как “последовательный” алгоритм, для выполнения способа RAIM, он использует все прошлые и настоящие множества измерений системы, например системы GPS. “Последовательный” подход имеет потенциальное преимущество над подходом “мгновенного снимка” в том, что он может обнаруживать избыточную погрешность позиции, вызванной отказом, при малом отношении между величины наведенной погрешности и величиной шума процесса. Однако до сих пор не разработаны способы, чтобы оценивать уровни защиты для этого типа алгоритма.
Одной задачей настоящего изобретения является предложить способ для предсказания эффективности системы спутниковой навигации GNSS (глобальная навигационная спутниковая система), в которой способ использует только приемник, расположенный на борту летательного аппарата, и вследствие этого не требует наземной системы поддержки.
Эти и другие задачи изобретения выполняют в соответствии с изобретением с помощью способа, принципиальные особенности которого определены в пункте 1 формулы изобретения. Конкретные варианты осуществления описаны в зависимых пунктах формулы изобретения.
Другой задачей изобретения является система предсказания и компьютерная программа, как заявлено в формуле изобретения.
Кратко существенная новизна настоящего изобретения относительно предшествующего уровня техники заключается в следующем.
1. Использование аналитических зависимостей между требованиями к системе, параметрами моделирования и эффективностью системы, причем эти зависимости являются получаемыми посредством новой логической последовательности операций, которая начинается с требований, и оценивает эффективность, и которая дает возможность вычислять аналитическим способом нормализованные радиусы неопределенности в направлении псевдодальности.
2. Применение аналитического распределения риска целостности между горизонтальной и вертикальной осями, дающего возможность согласовывать эффективность по двум осям.
3. Оптимальный выбор порогов предупредительного сигнала для функции RAIM для каждого конкретного этапа полета и для каждого конкретного сценария на основании вышеупомянутых аналитических зависимостей.
4. Может быть оценен глобальный характер сценариев для каждой достижимой эффективности.
5. Динамическое вычисление стандартного отклонения погрешности псевдодальности, связанной с каждым спутником.
6. Обеспечение аналитической модели, которая учитывает эффекты сцинтилляции (быстрое и существенное изменение погрешности ионосферы) и подобные эффекты, ухудшающие достижимую эффективность системы навигации.
Изобретение также обеспечивает следующие преимущества.
1. Модульная логическая архитектура, дающая возможность легко расширять сценарии для моделирования, например для введения новых созвездий.
2. Возможность оценки аналитическим способом эффективности, которая может быть достигнута с помощью объединения разных способов целостности.
Дополнительные особенности и преимущества изобретения станут понятными с помощью следующего подробного описания, предоставленного только в качестве не ограничивающего примера, со ссылкой на прилагаемые чертежи, на которых:
фиг.1 - блок-схема общей структуры способа моделирования в соответствии с изобретением;
фиг.2 - блок-схема способа вычисления вероятности ложного предупредительного сигнала, вероятности пропущенного обнаружения и векторов Tp;
фиг.3 - блок-схема способа обработки векторов Tp; и
фиг.4, фиг.5 и фиг.6, взятые совместно, образуют блок-схему этапов способа моделирования в соответствии с изобретением.
Способ моделирования в соответствии с изобретением основан на требованиях целостности, непрерывности, доступности, точности и времени до предупредительного сигнала, необходимых для навигации летательного аппарата, например для гражданской навигации на ее различных этапах, включая заход на посадку и приземление. Приемник GNSS на борту летательного аппарата содержит все вероятности ложного предупредительного сигнала (Pfa) и вероятности пропущенного обнаружения (Pmd), запомненные в нем, соответствующие всем возможным требованиям для данной системы навигации, в частности требования непрерывности и целостности являются уникальными для данного этапа полета. Вероятность ложного предупредительного сигнала (Pfa) и пропущенного обнаружения (Pmd) зависит от этих двух требований и от сценария. Вероятность ложного предупредительного сигнала (Pfa) зависит от рассматриваемого способа целостности и от типа используемого алгоритма RAIM, вероятность пропущенного обнаружения (Pmd) зависит от данного созвездия, которое может быть одним или объединенным, расширенным или нет, от рассматриваемого направления, которое может быть вертикальным или горизонтальным, и, возможно, от типа рассматриваемого предупредительного сигнала, который может быть одиночным или двойным.
Способ в соответствии с изобретением разработан, чтобы быть применимым системой, которая может выполнять группы модулей программ, запомненных на диске или доступных через сеть.
Первым этапом моделирования является получение из упомянутого приемника, на основании необходимых требований, вероятности ложного предупредительного сигнала (Pfa) и вероятности пропущенного обнаружения (Pmd) для заданного алгоритма RAIM, который может быть “моментальным снимком” или последовательным.
Базу данных Pfa и Pmd этих величин создают относительно различных изученных случаев моделирования, иначе говоря, сценариев, которые могут быть использованы.
На фиг.1 номер 1 указывает устройство получения Pfa и Pmd, которое получает вероятность ложного предупредительного сигнала и вероятность пропущенного обнаружения.
Вероятности ложного предупредительного сигнала получают из заданного требования непрерывности в соответствии со следующим ограничением:
Риск непрерывности <(1-требование непрерывности) (1)
для данного выбранного этапа навигации, захода на посадку или приземления.
Для случая RAIM “мгновенного снимка” применима следующая формула:
где х обозначает рассматриваемый этап полета, λ - коэффициент для назначения вероятности отказа в приемник GNSS, CRx - риск непрерывности данного этапа полета, Tappx - продолжительность этапа полета (захода на посадку или навигации), а Texpx - время воздействия на риск выбранного этапа, иначе говоря, время, в течение которого потеря функции из-за ложного предупредительного сигнала является критической.
С другой стороны, для случая последовательного RAIM применима следующая формула:
где 3600 - время выборки в секундах.
Вероятность пропущенного обнаружения определяют в соответствии со следующей формулой:

где y обозначает тип созвездия (одно или объединенное, расширенное или нет), z представляет направление, которое может быть горизонтальным или вертикальным, для которого учитывают риск целостности, t обозначает вероятность одного или двойного сбоя, а IR - требование целостности данного этапа полета.
После получения Pfa и Pmd устройство 2 генерирования векторов Tp генерирует векторы, представляющие нормализованный радиус неопределенности, упомянутые ниже как “векторы Tp”, как теперь будет описано.
Установка условий вероятности ложного предупредительного сигнала и пропущенного обнаружения в указанном уравнении системы в сценарии шума канала с гауссовым распределением генерирует статистическую функцию типа распределения хи-квадрат, решение упомянутого уравнения предоставляет величину для каждой степени свободы упомянутого распределения, таким образом, генерируя вектор, и дает возможность вычисления “нормализованного радиуса защиты псевдодальности”, который является нормализованным радиусом неопределенности, с помощью которого приемник может вычислить свое расстояние (псевдодальность) от спутника, ясно, для того чтобы найти действительный радиус неопределенности, относящийся к упомянутому спутнику, величина нормализованного радиуса должна быть умножена на стандартное отклонение погрешности этого спутника, которое известно заранее.
Степень свободы равна разности между числом спутников, видимых для выбранного случая в позиции моделируемого приемника GNSS, и числом неизвестных в системе, используемых для того, чтобы определить соответствующее решение PVT (позиция, скорость, время). С помощью объединения фактических радиусов неопределенности разных спутников и текущих координат пространства-времени и проецирования результирующей величины на горизонтальные и вертикальные плоскости горизонтальные ограничения целостности (HIL) и вертикальные ограничения целостности (VIL), и горизонтальные ограничения исключений (HEL) и вертикальные ограничения исключений (VEL) находят, как описано ниже.
Таким образом, вектор Tp содержит нормализованный радиус неопределенности, подходящий для всех спутников, в то время как степень свободы системы изменяется для данной пары Pfa/Pmd. Однако абсолютный радиус неопределенности изменяется для каждого спутника в соответствии со стандартным отклонением погрешности рассматриваемого спутника.
Результаты из устройства 2 генерирования векторов Tp посылают в устройство 3 управления вектором Tp, которое обрабатывает базу данных векторов Tp, как описано ниже. Выход устройства 3 управления вектором Tp, наконец, соединяют с устройством 4 моделирования, которое выполняет моделирование для предварительно определенного сценария, иначе говоря, предсказание эффективности текущей системы. Кратко моделирование содержит вычисление уровней целостности и исключений (HIL, VIL, HEL, VEL) с использованием применимого вектора Tp для выбранного случая. Выбирают элемент вектора, соответствующий степени свободы системы, и этот элемент умножают на стандартное отклонение погрешности, применимой к данному спутнику, чтобы найти абсолютный радиус неопределенности каждого спутника. Абсолютные радиусы неопределенности, найденные таким способом, преобразуют в радиусы неопределенности в горизонтальном и вертикальном направлениях, таким образом, выдавая два отдельных вектора, размеры которых равны числу видимых спутников, максимальные величины каждого вектора образуют горизонтальные ограничения целостности (HIL) и вертикальные ограничения целостности (VIL). Ограничения, вычисленные таким способом, сравнивают с теоретическими величинами ограничений, связанных с системой: если вычисленные ограничения превышают упомянутые теоретические величины, это означает, что соответствующий этап полета не может быть выполнен безопасно. Следовательно, необходимо, например, изменить аэропорт приземления или изменить процедуру захода на посадку.
Доступность летательного аппарата для предоставления службы, выраженная в терминах доступности точности и целостности, определяют как процентное отношение пространства и времени, при котором следующие неравенства являются правильными:
(HIL<HAL) (2)
(VIL<VAL) (3)
где HAL и VAL - горизонтальные и вертикальные ограничения предупредительного сигнала, и они являются известными требованиями системы. Это упоминают как доступность обнаружения отказа.
Непрерывность предоставленной службы, выраженная с точки зрения непрерывности, точности и целостности, при условии доступности в начале этапа, определяют как множество неравенств (1), (4) и (5), в которых неравенства (4) и (5) являются такими, как следующие:
(HEL<HAL) (4)
(VEL<VAL) (5)
Это упоминают как обнаружение сбоя и наличие исключений (FDE). FDE является очень полезным, чтобы определять доступность эффективности непрерывности во время захода на посадку, когда удален критический оказавший спутник.
Фиг.2 является блок-схемой получения Pfa и Pmd и вычисления векторов Tp на основании требований к системе и выбранного случая моделирования. Это вычисление выполняют на основании информации, поданной устройствами 5 и 6, которая соответствует, соответственно, заданным требованиям навигации и допущениям RAIM, показанным ниже:
среднее число спутников в созвездии;
вероятность отказа одного спутника конкретном созвездии;
вероятность множества отказов конкретного созвездия.
После получения Pfa и Pmd генерируют базу 7 данных Pfa и Pmd упомянутых величин, причем эти величины затем подают в устройство 2 генерирования векторов Tp, из которого их посылают в устройство 3 управления вектором Tp, как описано выше.
Фиг.3 является блок-схемой процесса управления векторами Tp. Этот процесс делает векторы Tp легко используемыми пользователем, давая возможность ручного доступа к отдельному вектору или доступа с помощью компьютера, таким образом, давая возможность выполнения автоматических процессов вычисления. Эта схема изображает устройство 8 проверки, которое содержит векторы Tp в формате проверки, эти векторы могут быть импортированы из устройства 9 базы данных Tp или экспортированы в устройство 9 базы данных векторов Tp. Операции импортирования или экспортирования из базы 9 данных векторов Tp в устройство 8 проверки выполняют, соответственно, с помощью устройства 10 импортирования, которое собирает все векторы из устройства 8 проверки и посылает их в устройство 9 базы данных Tp, и устройства 11 экспортирования, которое выполняет обратную операцию. Блок-схема фиг.3 также содержит устройство 12 считывания и устройство 13 записи, которые выполняют, соответственно, операции ручного считывания и записи отдельных векторов Tp из устройства 9 базы данных векторов Tp и в устройство 9 базы данных векторов Tp. Наконец, устройство 14 графического интерфейса обеспечено для взаимодействия с устройством 10 импортирования, устройством 11 экспортирования, устройством 12 считывания и устройством 13 записи.
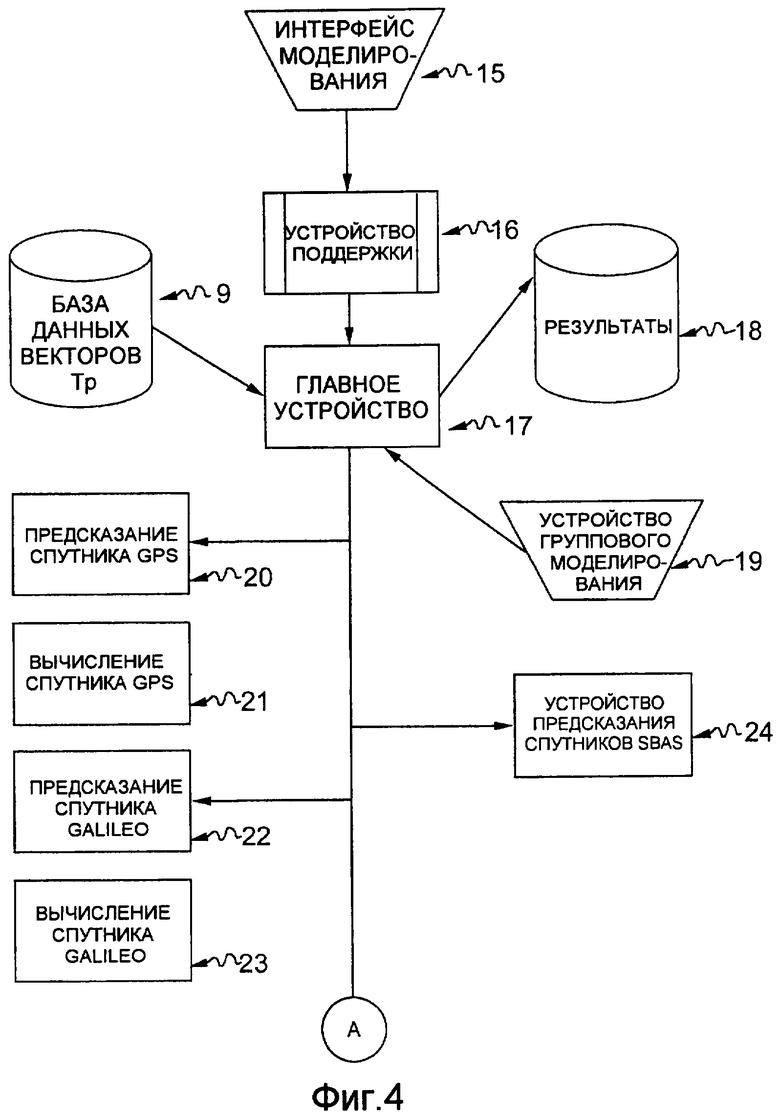
Фиг.4, фиг.5, фиг.6, взятые совместно, изображают блок-схему этапов способа моделирования в соответствии с изобретением, которая также может быть интерпретирована как схема модулей соответствующей программы моделирования для выполнения с помощью компьютерной системы.
Устройство 15 интерфейса моделирования обеспечено, чтобы дать возможность пользователю начать процесс моделирования. Устройство 15 интерфейса моделирования может взаимодействовать с устройством 16 поддержки, которое содержит программу для управления упомянутым устройством 15 интерфейса моделирования.
Устройство 16 поддержки взаимодействует с главным устройством 17, которое содержит ядро процесса моделирования. Главное устройство 17 передает результаты моделирования в устройство 18 результатов в виде базы данных внутренних результатов процесса моделирования. Главное устройство 17 использует векторы Tp, содержащиеся в базе 9 данных векторов Tp, определенной выше. В качестве альтернативы, главное устройство 17 может выполнять групповое моделирование с помощью группового устройства 19, которое обеспечивает автоматический интерфейс для автоматической проверки всех возможных случаев моделирования.
Главное устройство 17 выполняет этапы моделирования с использованием множества данных, поданных из соответствующего множества устройств, в частности устройства 20 предсказания спутников GPS, которое предсказывает спутники, видимые для созвездия GPS (оптимизированного созвездия, как описано в RTCA DO-229D, приложение В), в то время как следующее устройство 21 вычисления спутников GPS вычисляет позицию спутников созвездия GPS, предсказанного с помощью устройства 20 предсказания спутников GPS. Логическая последовательность устройств, определенных выше, имеет функцию составления созвездия, видимого в текущий момент и позиции.
С другой стороны, устройство 22 предсказания спутников Galileo предсказывает видимые спутники для созвездия Galileo (оптимизированное созвездие Уолкера, как описано в MOPS Galileo), в то время как следующее устройство 23 вычисления спутников Galileo вычисляет позицию спутников созвездия Galileo.
Между тем, устройство 24 предсказания спутников SBAS (антенная система с управляемой диаграммой направленности) предсказывает видимые спутники для созвездия SBAS.
Последовательность операций процесса моделирования, описанного до этого этапа со ссылкой на фиг.4, затем продолжается, как изображено на фиг.5, устройство А, представленное как на фиг.4, так и на фиг.5, представляет продолжение этой последовательности операций.
На данном этапе, способ моделирования вычисляет ухудшение точности (DOP) посредством устройства 25 вычисления DOP. Это устройство 25 вычисления DOP также вычисляет точность позиции для выбранного созвездия.
Устройство 26 точности вычисляет точность позиции в случае объединенных созвездий PVT.
Устройство 27 HW вычисляет матрицы H и W (матрицы наблюдений и весов) для выбранного созвездия. Устройство 27 HW использует данные, полученные из устройства 28 UERE, которое вычисляет стандартное отклонение пользовательской эквивалентной погрешности дальности (UERE) при результирующем угле возвышения спутника. UERE учитывает погрешности из-за спутника, такие как погрешности часов.
В свою очередь, устройство 28 UERE использует данные, поданные с помощью устройства 29 UEE, которое вычисляет стандартное отклонение погрешности пользовательской аппаратуры (UEE) при результирующем угле возвышения спутника. UEE учитывает исключительно погрешности из-за пользователя.
С другой стороны, устройство 27 HW использует данные, полученные из устройства 30 сцинтилляции, которое вычисляет UERE при результирующем угле возвышения спутника в случае сцинтилляции. Устройство 30 сцинтилляции предназначено для того, чтобы использовать результаты устройства 28 UERE и устройства 31 ТЕС, которое вычисляет текущую величину полного электронного содержания (ТЕС).
Устройство 32 HPL-VPL вычисляет горизонтальные и вертикальные ограничения защиты (HPL/VPL) для канала целостности Galileo (GIS). Упомянутые ограничения защиты учитывают состояние работоспособности спутников и имеются только для системы Galileo. Устройство 32 HPL-VPL предназначено, чтобы использовать данные из устройства 29 UEE и из первого устройства 33 горизонтального риска целостности, которое вычисляет горизонтальный риск целостности GIC для данных HAL, и из второго устройства 34 вертикального риска целостности, которое вычисляет вертикальный риск целостности GIC для данных VAL.
Последовательность операций процесса моделирования, описанного до этого этапа со ссылкой на фиг.5, затем продолжается, как изображено на фиг.6, устройство, представленное как на фиг.5, так и на фиг.6, представляет продолжение этой последовательности операций.
Фиг.6 изображает множество возможных альтернатив, которые выбирают с помощью пользователя в устройстве 15 интерфейса моделирования. В соответствии со сделанным выбором главное устройство 17 использует необходимые данные, чтобы выполнить различные операции, описанные ниже.
Устройство 35 RAIM выполняет алгоритм RAIM с использованием величин HIL/VIL и HEL/VEL.
Устройство 36 SBAS вычисляет горизонтальные и вертикальные ограничения защиты, HPL и VPL, для созвездия (расширения) GPS/SBAS.
Устройство 37 PVT объединяет результаты GIS и RAIM в случае объединенных по необработанной псевдодальности созвездий, иначе говоря, созвездий, в которых множество спутников GPS и Galileo рассматривают как одно созвездие.
С другой стороны, устройство 39 SINGLE объединяет результаты GIS и RAIM в случае одного созвездия.
Устройство 40 RAIM-RAIM объединяет результаты RAIM в случае объединенных созвездий PVT, в то время как общее устройство 41 объединяет результаты RAIM, GIS и SBAS в случае объединенных созвездий PVT.
Наконец, устройство 42 печати печатает результаты в предварительно определенном формате проверки.
Последовательность моделирования также может моделировать конфигурации GNSS со связанными параметрами и опциями, описанными ниже.
Что качается этапов полета, процесс моделирования поддерживает следующие стандарты в качестве альтернатив:
NPA/RNP0.3
RNP0.1
APV-I
APV-II
Cat-I
Ultra Low RNP (ULRNP)
Cat-II
Cat-IIIb
Что касается конфигурации приемника GPS, они могут быть следующими:
GPS L1;
GPS L1/L2;
Galileo L1/E5b OS (открытая служба);
GPS L1 и Galileo L1/E5b OS, PVT или объединенный по необработанной псевдодальности;
GPS L1/L5 и Galileo L1/E5b OS, PVT или объединенный по необработанной псевдодальности;
Galileo L1/E5b SoL (служба безопасности и долговечности);
все вышеупомянутые стандарты с добавлением расширенной SBAS (только для GPS).
Способами целостности, которые могут быть использованы, в настоящее время являются RAIM, канал целостности системы Galileo (GIS) и расширение (SBAS). Также допустимы некоторые комбинации вышеупомянутых способов.
Алгоритмы RAIM, которые могут быть использованы в настоящее время, являются следующими:
стандартный RAIM FD LSR моментального снимка;
модифицированный RAIM FD LSR моментального снимка, основанный на допущении некоррелированного шума (предварительная фильтрация);
последовательный RAIM, основанный на допущении некоррелированного шума (предварительная фильтрация).
С помощью выбора опции “модифицированный RAIM FD LSR - не фильтрованный коррелированный шум” можно вычислить эффект не фильтрованного коррелированного шума в алгоритме RAIM.
Предпочтительные пространственные сетки, поддерживаемые во время моделирования, являются следующими:
Всемирная сеть: северное полушарие;
ЕСАС: широта 35°/65°, долгота -10°/30°;
критические местоположения (1 точка);
определенная пользователем.
Предпочтительные временные сетки, поддерживаемые во время моделирования являются следующими:
GPS: 12 часов;
Galileo: 14 часов и 21 минута;
GPS и Galileo: 3 звездных дня Galileo (LMC между GPS и Galileo);
определенная пользователем.
Скорость выборки, поддерживаемая с помощью моделирования, может быть следующей:
5 минут для моделирования относительно всего полушария Земли или ECAC;
более высокая скорость (6 секунд) для критического местоположения и для этапов захода на посадку с “низким RNP”;
определенная пользователем.
Угол маскировки определяет предельный угол возвышения, ниже которого спутник должен быть исключен из решения. Предпочтительный угол маскировки, поддерживаемый с помощью моделирования, обычно равен 5° для спутников GPS или 10° для спутников Galileo (MOPS Galileо). Разные углы маскировки могут быть выбраны для спутников, которые “восходят” и “заходят”, в частности 2° для первых и 0° для последних. В случае критических местоположений угол зависит от местоположения, но всегда равен больше 5°. Однако пользователь может задавать любые желаемые углы маскировки.
Число неизвестных в решении уравнения состояния системы зависит от типа созвездия и от состояния параметров, как описано выше. В случае одного созвездия, неизвестных всегда 4, а именно, три пространственные координаты пользователя и разность между часами приемника и часами спутников (сегментом пространства). В случае объединенных созвездий GPS/Galileo, разности могут существовать между временами системы и между одинаковыми частотами двух созвездий. Первый параметр называют GGTO (смещение времени между GPS и Galileo), и он может быть или может не быть известным. Второй параметр известен как смещение между частотами, и он равен разности между частотами L1 двух созвездий, а третий параметр равен разности между частотами L5/E5 двух созвездий; эти два параметра могут быть или могут не быть известными.
Система моделирования поддерживает следующие предпочтительные конфигурации:
4 неизвестных: одно созвездие или объединенное созвездие с доступным (GGTO);
5 неизвестных: объединенное созвездие с недоступным (GGTO);
6 неизвестных: объединенное созвездие с недоступным (GGTO) и с недоступным смещением L1 между частотами;
7 неизвестных: объединенное созвездие с недоступным (GGTO) и с недоступными смещениями L1 L5/E5 между частотами.
Доступность целостности и непрерывности может изменяться от 99% (минимальное требование) и до 99,999% (максимальное требование).
Исследование использует, по меньшей мере, одну модель эффекта “выхода из строя”, в частности общую модель, в которой один спутник исключают из созвездия с помощью выбора его PRN (номер псевдодальности) или модели “службы SoL Galileо”, в которой один спутник сначала исключают из созвездия, с помощью выбора его PRN, а затем устанавливают ухудшенную величину SISMA (сигнал в точности мониторинга пространства).
Имеются две основные модели ухудшения параметров системы, поддерживаемые устройством моделирования. Первая модель учитывает потерю частоты из-за помех или “преднамеренных помех” (модели с ухудшенными параметрами), причем эта опция имеется только для алгоритма RAIM и для объединенных созвездий, потеря частоты L1 приводит к комбинации GPS L5 Galileo и E5b, в то время как потеря L5 E5b приводит к комбинации GPS L1 Galileo и L1.
Вторая модель учитывает сцинтилляцию на основании ссылок R02 и R03. Определяют географическую область, на которую воздействует сцинтилляция, в настоящем предпочтительном варианте осуществления со ссылкой на Бразилию, в частности на Рио-де-Жанейро, с помощью следующих диапазонов:
широта [-35,-5] градусов
долгота [-70, -40] градусов.
Первым этапом является вычисление профиля TEC как функции широты, долготы и времени UTC (координированное всемирное время). Функция TEC является произведением двух половинных синусоидальных функций в направлениях широты и долготы и полной синусоидальной функции по оси времени UTC, при допущении разности между локальным временем и временем UTC имеется ограничение, равное 30×1016 относительно номинальной величины UTC, и ограничение, равное 80×1016 относительно максимальной величины. Вне области, определенной с помощью вышеупомянутых величин широты и долготы, величина ТЕС равна номинальной величине.
Вклад погрешности от ионосферы одной частоты определяют как функцию величины ТЕС и, следовательно, как функцию возвышения спутника, широты, долготы и UTC. Погрешность от ионосферы двух частот допускают равной нулю.
Таким образом, полную UERE спутника вычисляют как функцию возвышения спутника, широты, долготы и UTC.
Углы маскировки спутников являются функциями частоты, широты, долготы и UTC. Что касается частоты, ссылка R02 показывает, что при условиях сцинтилляции сигналы спутника теряют при определенных углах возвышения и что сигнал на частоте L5/E5b теряют для углов возвышения, которые находятся выше относительно частоты L1. Следовательно, начиная с больших углов возвышения, для которых имеется сигнал двойной частоты, и уменьшая эти углы возвышения, первоначально достигают состояния, в котором имеется только сигнал на одной частоте, L1, а затем состояния, в котором больше не имеется никакой сигнал.
С другой стороны, когда рассматривают широту, долготу и UTC, зависимость углов маскировки от этих параметров обнаруживают с помощью того факта, что они являются параметрами функции ТЕС, причем увеличение функции ТЕС сопровождается увеличением угла возвышения, при котором теряют сигнал спутника.
Для каждого спутника на основании величины ТЕС и связанного угла маскировки тип спутника определяют следующим образом:
спутник “двойной частоты”, имеющий погрешность от ионосферы, равную нулю;
спутник “одной частоты” (L1), имеющий погрешность от ионосферы, зависящую от возвышения спутника, широты, высоты и UTC;
“недоступный” спутник, для которого потеряны обе частоты и который вследствие этого исключен из видимых спутников и из решения местоположения.
Следующий дополнительный подход определен для случая, в котором канал целостности Galileo является доступным. Спутник одной частоты не может быть использован для GIS, и он также не применим в случае, в котором имеется только один спутник одной частоты типа Galileo. В этих случаях имеются различные решения. Первым является использовать GIS с ухудшенными параметрами (26 SIS с SISMA с ухудшенными параметрами), объединенный с глобальным алгоритмом RAIM, причем последний используют, чтобы вычислять потерянный спутник Galileo. Это решение также используют, если полностью потерян только один спутник Galileo.
Второе решение является применимым в случае, в котором, по меньшей мере, два спутника Galileo являются недоступными для GIS (либо так как они являются типа одной частоты, либо так как они полностью потеряны). Во втором решении GIS объявляют недоступным, и к остальному созвездию применяют глобальный RAIM.
Когда рассматривают эффект сцинтилляции, предусматривают два типа пользователей. Первый тип представляет пользователя, который сохраняет в решении спутники одной частоты с использованием для этого модели коррекции ионосферы одной частоты, причем этот тип пользователя получает наказание с точки зрения точности с выгодой с точки зрения ухудшения точности (DOP).
Второй тип представляет пользователя, который исключает спутники одной частоты из решения, причем этот тип пользователя получает наказание с точки зрения доступности с выгодой с точки зрения точности.
Вышеупомянутый сценарий содержит все следующие параметры в комбинации:
этап полета: NPA Cat-III3b;
конфигурация GNSS: GPS L1, GPS L1/L5, Galileo L1/E5b,…;
используемый способ целостности: RAIM, GIS, объединенные RAIM и GIS;
тип алгоритма RAIM: стандартный, последовательный;
рассматриваемая географическая область: ECAC, распространенная по всему миру, конкретное местоположение;
временная/пространственная сетка: шаг исследования во времени (минуты и секунды) и пространстве (градусы широты и долготы);
угол маскировки;
число уравнений в решении навигации;
любые ухудшения параметров системы: помехи, спутники вне срока службы, наличие сцинтилляции.
Алгоритм моделирования предназначен для того, чтобы вычислять множество статистических величин, в частности полное число видимых спутников, ухудшение точности (DOP), уровни целостности, уровни защиты, уровни исключений, точность, процент доступности обнаружений отказов (FD), процент доступности обнаружений ошибок и доступности обнаружений ошибок и исключений (FDE), и процент доступности целостности и непрерывности GIS. Ухудшение точности (DOP), уровни целостности, уровни защиты, уровни исключений и точность могут быть горизонтального или вертикального типа, и их вычисляют, по меньшей мере, с одной предварительно определенной величиной вероятности, в частности 95%, 99%, 99,5% и 99,999%. Уровни защиты могут быть глобальными или могут относиться к диапазону части созвездия [n-1], чтобы учитывать эффект удаления критического спутника. Уровни исключений могут учитывать одно или двойное исключение сбоя.
Процент доступности обнаружений отказов (FD), процент доступности обнаружений ошибок и исключений (FDE) определяет доступность целостности и непрерывности системы, и идентифицируют отказы в RAIM относительно подходящих величин HAL и VAL. Процент FDE может учитывать случай, в котором отказал один или два спутника, и результирующая величина относится к целостности и непрерывности, когда отказавший спутник или спутники удалены.
Процент доступности целостности и непрерывности GIS вычисляют относительно подходящих величин HAL и VAL, вычисленных с помощью способа уровней защиты, причем разделяют допустимый риск целостности GIS между предварительно определенными горизонтальными и вертикальными величинами, в частности 98% вертикальных и 2% горизонтальных, или с помощью способа объединенного риска целостности. С помощью обоих способов можно выполнять глобальное вычисление или вычисление, относящееся к диапазону части созвездия [n-1], чтобы учитывать эффект удаления критического спутника.
Ясно, что принцип изобретения остается одним и тем же, варианты осуществления и детали изготовления могут существенно изменяться от того, что описано и проиллюстрировано, исключительно в качестве не ограничивающего примера, не выходя за рамки защиты настоящего изобретения, как определено с помощью прилагаемой формулы изобретения.




Изобретение относится к области радиотехники, а именно к спутниковой навигации, и может быть использовано в приемнике GNSS. Технический результат заключается в повышении точности предсказания эффективности системы спутниковой навигации вследствие учета большего количества измеренных параметров, а также возможности адаптации предсказания к различным ситуациям полета. Для этого определяют первые данные (5), указывающие требования точности, непрерывности, целостности и доступности системы, и определяют вторые данные (6), указывающие число спутников в созвездии и соответствующие вероятности отказа, необходимые для того, чтобы использовать предварительно определенный способ RAIM для мониторинга системы. Кроме того, из приемника получают третьи данные (Pfa, Pmd), указывающие вероятность ложного предупредительного сигнала и вероятность пропущенного обнаружения в соответствии с требованиями для предварительно определенного способа RAIM, создают базу (7) данных этих третьих данных в соответствии с предварительно определенными сценариями и генерируют (2) векторы данных, представляющие радиус неопределенности относительно расстояния приемника от спутников, которые могут быть определены приемником как функция упомянутых первых (5), вторых (6) и третьих (Pfa, Pmd) данных, создают базу (9) данных векторов и выполняют моделирование, по меньшей мере, одного из сценариев на основании векторов. 3 н. и 21 з.п. ф-лы, 6 ил.
1. Способ предсказания эффективности системы спутниковой навигации, содержащей, по меньшей мере, одно созвездие спутников для приемника GNSS, причем способ содержит операции, с помощью которых: определяют первые данные (5), указывающие требования точности, непрерывности, целостности и доступности системы, причем требование целостности определяют для предварительно определенного направления; и
определяют вторые данные (6), указывающие число спутников в упомянутом, по меньшей мере, одном созвездии и соответствующие вероятности отказа, необходимые для выполнения предварительно определенного способа автономного контроля целостности в приемнике (RAIM) для мониторинга системы;
причем способ отличается тем, что он также содержит операции, с помощью которых:
получают из упомянутого приемника третьи данные (Pfa, Pmd), указывающие вероятность ложного предупредительного сигнала (Pfa) и вероятность пропущенного обнаружения (Pmd), как функцию упомянутых требований непрерывности и целостности, для предварительно определенного способа RAIM;
причем вероятность ложного предупредительного сигнала (Pfa) является функцией требования непрерывности заранее определенного этапа полета, времени воздействия (Техрх) на риск этапа полета и продолжительности (Таррх) этапа полета;
причем вероятность пропущенного обнаружения (Pmd) является функцией требования целостности этапа полета, направления, для которого требование целостности определено, типа созвездия и продолжительности (Таррх) этапа полета;
создают базу (7) данных упомянутых третьих данных в соответствии с различными предварительно определенными сценариями, причем эти сценарии представляют набор заранее определенных параметров, которые определяют рабочую ситуацию;
генерируют (2) векторы данных, представляющие радиус неопределенности относительно расстояния приемника от спутников, которые могут быть определены приемником как функция упомянутых первых (5), вторых (6) и третьих (Pfa, Pmd) данных, и создают базу (9) данных упомянутых векторов;
выполняют моделирование, по меньшей мере, одного из упомянутых сценариев на основании упомянутых векторов, причем это моделирование содержит вычисление горизонтальных ограничений целостности (HIL) и вертикальных ограничений целостности (VIL) и горизонтальных ограничений исключений (HEL) и вертикальных ограничений исключений (VEL) с использованием данных векторов, причем ограничения целостности (HIL, VIL) и ограничения исключений (HEL, VEL) указывают эффективность системы спутниковой навигации.
2. Способ предсказания эффективности системы спутниковой навигации по п.1, в котором упомянутые сценарии содержат этапы навигации, в частности этапы взлета, удаленной навигации, захода на посадку и приземления летательного аппарата.
3. Способ предсказания эффективности системы спутниковой навигации по п.1, в котором операция генерирования (2) векторов данных содержит этапы, на которых:
устанавливают предварительно определенные вероятности ложного предупредительного сигнала и пропущенного обнаружения в уравнении состояния системы;
решают упомянутое уравнение, получая нормализованный радиус неопределенности;
умножают упомянутый нормализованный радиус на стандартное отклонение погрешности спутника, чтобы получить абсолютные радиусы неопределенности;
определяют ограничения целостности и ограничения исключений на основании упомянутых абсолютных радиусов.
4. Способ предсказания эффективности системы спутниковой навигации по п.3, в котором упомянутые абсолютные радиусы неопределенности проецируют в горизонтальном и вертикальном направлениях, чтобы найти упомянутые горизонтальные и вертикальные ограничения целостности (HIL, VIL) соответственно и упомянутые горизонтальные и вертикальные ограничения исключения (HEL, VEL) соответственно.
5. Способ предсказания эффективности системы спутниковой навигации по п.1, дополнительно содержащий операцию, с помощью которой: импортируют все векторы из базы (9) данных.
6. Способ предсказания эффективности системы спутниковой навигации по п.1, дополнительно содержащий операцию, с помощью которой: экспортируют все векторы в базу (9) данных.
7. Способ предсказания эффективности системы спутниковой навигации по п.1, дополнительно содержащий операцию, с помощью которой: выполняют операцию ручного считывания из базы (9) данных векторов.
8. Способ предсказания эффективности системы спутниковой навигации по п.1, дополнительно содержащий операцию, с помощью которой: выполняют операцию ручной записи в базу (9) данных векторов.
9. Способ предсказания эффективности системы спутниковой навигации по п.1, дополнительно содержащий операцию, с помощью которой:
получают данные для предсказания видимых спутников для созвездия GPS.
10. Способ предсказания эффективности системы спутниковой навигации по п.1, дополнительно содержащий операцию, с помощью которой: получают данные для предсказания видимых спутников для созвездия Galileo.
11. Способ предсказания эффективности системы спутниковой навигации по п.1, дополнительно содержащий операцию, с помощью которой: получают данные для предсказания видимых спутников для созвездия SBAS.
12. Способ предсказания эффективности системы спутниковой навигации по п.9, дополнительно содержащий операции, с помощью которых: вычисляют снижение точности (DOP);
вычисляют точность позиции в случае объединенных созвездий (26) позиция, скорость, время (PVT);
вычисляют матрицы наблюдений (Н) и весов (W) с использованием данных, указывающих стандартное отклонение пользовательской эквивалентной погрешности дальности (UERE) при результирующем угле возвышения спутника, и данных, указывающих стандартное отклонение UERE при результирующем угле возвышения спутника в случае сцинтилляции, вычисления стандартного отклонения UERE с использованием данных из вычисления стандартного отклонения погрешности пользовательской аппаратуры (UEE) при результирующем угле возвышения спутника, и вычисления UERE в случае сцинтилляции с использованием данных, указывающих стандартное отклонение пользовательской эквивалентной погрешности дальности (UERE), и данных из вычисления текущей величины полного электронного содержания;
вычисляют ограничения защиты для канала целостности Galileo (GIS) с использованием данных из вычисления стандартного отклонения погрешности пользовательской аппаратуры (UEE), данных горизонтального риска целостности для канала целостности Galileo для данного горизонтального ограничения предупредительного сигнала (HAL) и данных вертикального риска целостности для канала целостности Galileo для данного вертикального ограничения предупредительного сигнала.
13. Способ предсказания эффективности системы спутниковой навигации по п.12, в котором ограничения защиты являются горизонтальными и вертикальными (HPL, VPL) соответственно.
14. Способ предсказания эффективности системы спутниковой навигации по п.12, дополнительно содержащий операцию, с помощью которой: вычисляют ограничения защиты для созвездия GPS/SBAS.
15. Способ предсказания эффективности системы спутниковой навигации по п.12, дополнительно содержащий операцию, с помощью которой: объединяют результаты канала целостности Galileo и результаты способа RAIM в случае объединенных созвездий PVT.
16. Способ предсказания эффективности системы спутниковой навигации по п.12, дополнительно содержащий операцию, с помощью которой: объединяют результаты канала целостности Galileo и результаты способа RAIM в случае созвездий, в которых набор спутников GPS и Galileo обрабатывают как единое созвездие.
17. Способ предсказания эффективности системы спутниковой навигации по п.12, дополнительно содержащий операцию, с помощью которой: объединяют результаты канала целостности Galileo и результаты способа RAIM в случае одного созвездия.
18. Способ предсказания эффективности системы спутниковой навигации по п.12, дополнительно содержащий операцию, с помощью которой: объединяют результаты способа RAIM в случае объединенных созвездий PVT.
19. Способ предсказания эффективности системы спутниковой навигации по п.12, дополнительно содержащий операцию, с помощью которой:
объединяют результаты способа RAIM, канала целостности Galileo и созвездие SBAS в случае объединенных созвездий PVT.
20. Способ предсказания эффективности системы спутниковой навигации по п.3, в котором созвездие является единственным, и число неизвестных в решении уравнения состояния системы - это три пространственные координаты приемника GNSS и разность между часами, связанными с упомянутым приемником GNSS, и часами, связанными со спутниками.
21. Способ предсказания эффективности системы спутниковой навигации по п.1, дополнительно содержащий операцию, с помощью которой: исключают спутник из созвездия с помощью выбора идентификационного кода упомянутого спутника.
22. Способ предсказания эффективности системы спутниковой навигации по п.21, дополнительно содержащий операцию, с помощью которой: устанавливают пониженную величину точности мониторинга сигнала в пространстве (SISMA).
23. Компьютерная система для предсказания эффективности системы спутниковой навигации, запрограммированная таким образом, чтобы осуществлять способ по п.1.
24. Машиночитаемый носитель, содержащий один или более программных модулей, сохраненных на нем, которые при выполнении компьютерной системой побуждают компьютерную систему осуществлять способ предсказания эффективности системы спутниковой навигации по п.1.
| Theodor Zink и др., ION ANNUAL MEETING, "Analyses oflntegrity Monitoring Techniques for a Global Navigation Satellite System (GNSS-2)", 26.06.2000 | |||
| ГЛОБАЛЬНАЯ КОСМИЧЕСКАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И РАДИОНАВИГАЦИИ, РАДИОМАЯК И ПРИЕМНИК, ИСПОЛЬЗУЕМЫЕ В ДАННОЙ СИСТЕМЕ | 1996 |
|
RU2182341C2 |
| EP 1729145 A1, 06.12.2006 | |||
| EP 0907894 A2, 14.04.1999 | |||
| ПРЯМОХОДОВОЙ КОНВЕРТОР | 2008 |
|
RU2380819C1 |
| US 2004220733 A1, 04.11.2004. | |||

