Область техники, к которой относится изобретение
Настоящее изобретение относится к инструменту, в особенности к инструменту для использования в лапароскопической хирургии, также именуемой «хирургией через замочную скважину».
Задачей настоящего изобретения является предложение простого инструмента с ручным управлением, обладающего эргономически правильными свойствами, и технических решений, относящихся к более эффективному использованию мышц хирурга, необходимых для управления курком или приводом инструмента, что позволяет хирургу лучше управлять инструментом.
Уровень техники
Хотя лапароскопическая операция впервые была выполнена на человеке в 1910 году, лапароскопические технологии начали применяться только с 1987 года. С тех пор произошли значительные изменения, касающиеся областей применения и хирургических процедур. Однако в эргономическом отношении лапароскопические инструменты получили минимальное развитие. Научные измерения показывают, что на проведение операции лапароскопическими методами хирург может расходовать в 10 раз больше энергии, чем на проведение той же операции методами открытой хирургии.
Различные конструкции лапароскопических инструментов известны из патентов США 5480409, 5893878, 5383888, 5792165, 5976121, 5488441, 5735873 и 5868784 и международной публикации WO 9724072, среди прочих документов. Хотя известные инструменты сильно отличаются по конструкции и функциям, общим для них является то, что они содержат рукоятку, имеющую одну или более подвижную часть, «курок», которым может манипулировать пользователь, например хирург, для управления исполнительным органом, соединенным с консольной частью трубчатого элемента или стержнем, соединенным другой своей частью с рукояткой.
В патенте США 5792165 описан инструмент, демонстрирующий высокую степень гибкости в отношении манипулирования исполнительным органом, который имеет возможности поворота, вращения и фиксации. Кроме того, к трубчатому телу инструмента могут быть присоединены (и сняты с него) различные исполнительные органы. Инструмент, описанный в патенте США 5792165, может также быть снабжен встроенным двигателем и микропроцессором, частично управляющим действиями исполнительного органа.
В патенте США 5383888 описан инструмент, демонстрирующий, по существу, те же функции, что и инструмент согласно патенту США 5792165.
В патенте США 5976121 описана рукоятка для манипулирования инструментом в связи с эндоскопией, в которой рабочий орган в виде ножниц на конце инструмента открывается или закрывается при помощи рычага.
Указанные решения имеют несколько недостатков.
Один из недостатков относится к самой конструкции рукояток инструментов, являющихся в подавляющем большинстве случаев эргономически невыгодными, поскольку инструменты не предусматривают рабочего положения с согнутой ладонью, и/или для управления инструментом необходимо перемещать пальцы, и для управления основными функциями инструмента требуется использование других пальцев, помимо указательного. Это приводит к тому, что в руке хирурга легко могут возникать мелкие неконтролируемые движения, которые приводят к относительно большим и нежелательным движениям рабочего конца инструмента, на котором установлен исполнительный орган. Имея такую конструкцию и пытаясь противодействовать указанным нежелательным движениям, на проведение операции лапароскопическими методами хирург может расходовать в 10 раз больше энергии, чем на проведение той же операции методами открытой хирургии.
Другим существенным недостатком, относящимся к большинству указанных инструментов, является их техническая сложность, приводящая к высокой стоимости изготовления. В связи с этим подразумевается, что с большой степенью вероятности инструменты будут использоваться несколько раз. Хотя теоретически инструменты можно дезинфицировать на 100%, исследование «Клиническая пригодность лапароскопической аппаратуры. Перспективное исследование функционирования и гигиены», проведенное Fengler, Pahlke, Bisson и Kraas в хирургическом отделении больницы в Моабите, учебной клинике университета Гумбольдта в Берлине, среди прочего показало, что после стерилизации относительно большое количество инструментов содержит остатки крови, и это представляет потенциальную опасность инфицирования пациентов, которое может приводить к серьезным заболеваниям и даже к смерти.
В лапароскопической хирургии хирург оперирует в значительной степени исполнительным органом инструмента, например зажимом, находящимся в практически закрытом положении. Для перемещения исполнительного органа из исходного, обычно полностью открытого положения, в рабочее, обычно почти полностью закрытое положение, хирургу необходимо переместить привод инструмента на относительно большое расстояние. Кроме того, если исполнительный орган представляет собой, например, ножницы, основное усилие к ножницам необходимо прикладывать, когда они находятся в практически закрытом положении, поскольку именно в этом положении обычно осуществляется резание. В известных инструментах для лапароскопической хирургии взаимосвязь между движением привода под действием внешнего усилия и движением исполнительного органа в основном остается постоянной от полностью открытого до полностью закрытого положения. Это значит, что пользователю приходится прилагать одинаково большое усилие к приводу и в обычно «бесполезном» диапазоне от полностью открытого положения исполнительного органа до начала «диапазона применения» или рабочего диапазона исполнительного органа, и в рабочем диапазоне, лежащем в значительной степени в пределах от 0% до приблизительно 50% раскрытия. Значит, мускульные группы, работающие при манипулировании приводом, используются относительно неправильно. Кроме указанных недостатков, среди прочего, для управления инструментами, описанными в патентах США 5735873, 5868784 и 5976121, для манипулирования исполнительным органом необходимо использовать несколько пальцев. Это особенно неудобно, когда инструмент используется на протяжении некоторого времени и в неудобных рабочих положениях, при которых сама рука вынуждена находиться в ненормальных и отчасти искривленных рабочих положениях. Это может привести к тому, что оператор инструмента, например хирург, неправильно используя свою мускулатуру, быстрее устает и испытывает переутомление рук и плеч.
Раскрытие изобретения
Задачей настоящего изобретения является устранение или, по меньшей мере, уменьшение одного или более недостатков, свойственных известным из уровня техники решениям, представленным упомянутыми патентными документами, и в особенности недостатков, относящихся к работе мышц при манипулировании приводом. В то же время задачей настоящего изобретения является создание инструмента, имеющего очень простую конструкцию, значительная часть компонентов которого может изготавливаться, например, но не исключительно, из пластических материалов. Это делает стоимость производства относительно низкой и может, следовательно, способствовать одноразовому использованию инструмента. Это, в свою очередь, исключает проблему переноса инфекции в результате неадекватной стерилизации инструмента.
В соответствии с настоящим изобретением эта задача решается при помощи признаков, детально изложенных ниже и содержащихся в формуле изобретения.
В одном аспекте настоящего изобретения предлагается инструмент для использования в лапароскопической хирургии, содержащий рукоятку, имеющую привод для манипулирования через рычажный механизм исполнительным органом, установленным на первом конце трубчатого элемента, причем второй конец трубчатого элемента проходит в рукоятку инструмента и соединен с рычажным механизмом. Рычажный механизм образован ножницеобразным звеном, соединенным первым концом с рукояткой при помощи первого поворотного соединения, и рычагом, соединенным вторым концом с рукояткой при помощи второго поворотного соединения, причем ножницеобразное звено вторым концом соединено с первым концом рычага при помощи третьего поворотного соединения. Таким образом, рычажный механизм, передающий движение и усилие от привода к исполнительному органу, создает взаимосвязь между поворотом привода вокруг первого поворотного соединения и движением захвата, или углом раскрытия исполнительного органа, по существу, по гиперболической кривой, поскольку рычажный механизм имеет достаточно большое передаточное отношение между приводом и исполнительным органом, когда привод находится в исходном, или отпущенном, положении или близком к нему, в то время как исполнительный орган находится в полностью открытом положении или близком к нему, и передаточное отношение уменьшается по мере поворота привода внутрь рукоятки. Это приводит к тому, что хирург или другие пользователи получают возможность лучшего управления исполнительным органом по мере того, как привод переходит к полностью взведенному положению, которое чаще всего используется в лапароскопической хирургии. Соответственно, действие усилия, приложенного к приводу, увеличивается нелинейно, в особенности, гиперболическим образом на исполнительном органе, когда привод поворачивается внутрь рукоятки. Это значит, что усилие, приложенное к приводу, в основном обратно пропорционально относительному перемещению исполнительного органа.
Лапароскопическая операция может длиться достаточно долго. Следовательно, очень важно, чтобы инструмент имел наилучшие возможности для регулировки по руке оператора, и в отношении расположения функциональных устройств, таких как привод, и в отношении размера. Следовательно, в предпочтительном варианте реализации инструмент согласно настоящему изобретению имеет рукоятку, содержащую, по меньшей мере, одну регулируемую часть, позволяющую приспособить рукоятку к размеру руки оператора. В одном из вариантов реализации, по меньшей мере, одна регулируемая часть инструмента расположена в задней части рукоятки.
В хирургии часто имеется необходимость в прижигании тканей или кровеносных сосудов. В соответствии с предпочтительным вариантом реализации настоящего изобретения инструмент содержит электрический разъем, известного, по существу, типа, для подключения напряжения к проводам, по которым электрический ток поступает к исполнительному органу для осуществления монополярного резания.
Краткое описание чертежей
Ниже с помощью чертежей описан на неограничивающем примере предпочтительный вариант реализации настоящего изобретения.
На фиг.1 представлен лапароскопический инструмент в соответствии с настоящим изобретением, в котором на привод, расположенный в рукоятке инструмента, не действует внешнее усилие, и привод находится в положении, далее именуемом отпущенным, при котором исполнительный орган в виде ножниц, установленный на консольном конце трубчатого элемента, находится в открытом положении.
На фиг.2 представлен инструмент по фиг.1 со снятой с рукоятки крышкой.
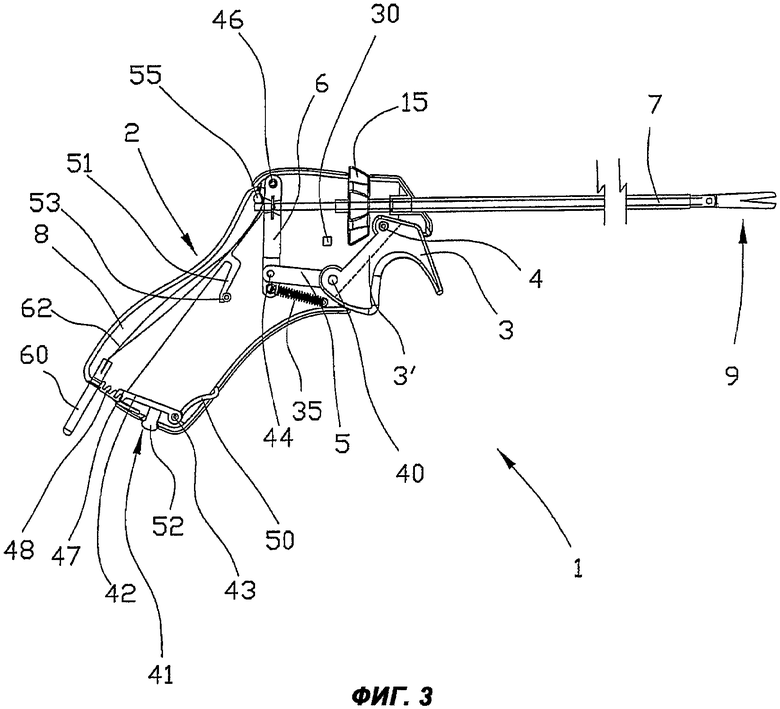
На фиг.3 представлен инструмент по фиг.2, после того как к приводу было приложено внешнее усилие, которое повернуло его в несколько утопленное в рукоятку положение, при котором ножницы инструмента частично открыты.
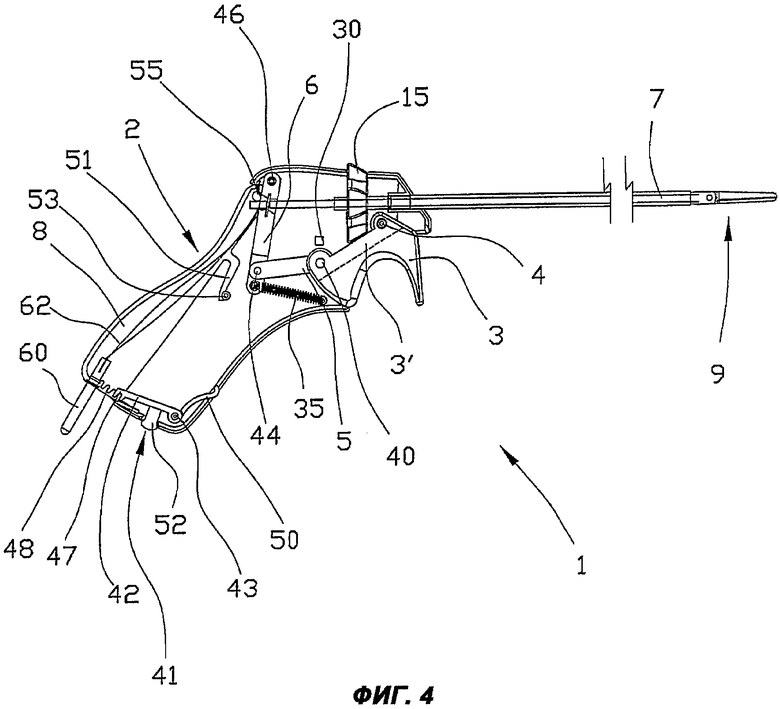
На фиг.4 представлен инструмент по фиг.2, после того как к приводу было приложено внешнее усилие, которое повернуло его в полностью утопленное в рукоятку положение, именуемое далее взведенным, при котором ножницы инструмента полностью закрыты.
На фиг.5 представлен инструмент по фиг.1 с регулируемой задней частью, находящейся в практически крайнем внутреннем (утопленном) положении.
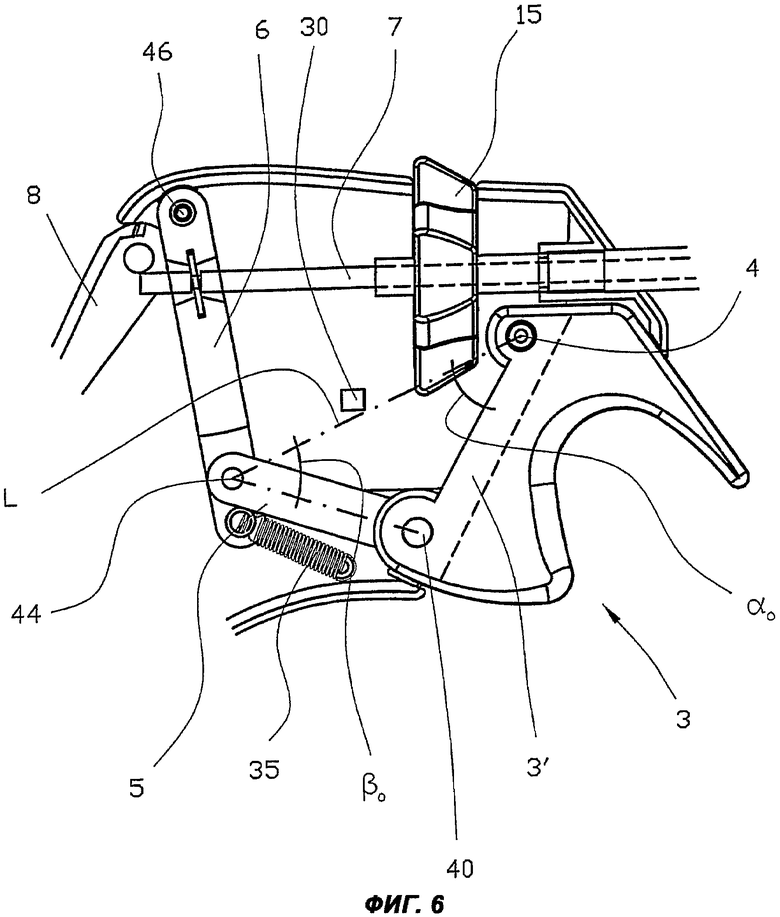
На фиг.6 представлен в увеличенном масштабе рычажный механизм по фиг.2.
На фиг.7 представлен график, демонстрирующий взаимосвязь между относительным перемещением исполнительного органа и относительным перемещением привода.
Осуществление изобретения
На прилагаемых чертежах представлен лапароскопический инструмент 1, содержащий рукоятку 2, имеющую курок или привод 3, поворачивающийся вокруг оси 4 при приложении к нему внешнего усилия, проходя угол α0. Привод 3 через рычажный механизм 3', 5, 6 связан известным способом с трубчатым элементом 7 известного типа. Трубчатый элемент 7 расположен с выступом из рукоятки 2. На консольном конце трубчатого элемента 7 имеется исполнительный орган 9 в виде ножниц, которые могут использоваться, например, в лапароскопической хирургии.
Трубчатый элемент 7 может поворачиваться вокруг своей продольной оси. Поворотом управляет поворотное колесо 15, расположенное в верхней части рукоятки 2. Трубчатый элемент 7 жестко прикреплен к поворотному колесу 15, а исполнительный орган 9 жестко прикреплен к трубчатому элементу 7. При повороте колеса 15 трубчатый элемент 7 и исполнительный орган 9 могут поворачиваться относительно рукоятки 2 известным способом.
На фиг.1 и 2 к приводу 3 не приложены внешние усилия, и он находится в отпущенном положении. Привод 3 вынужден оставаться в этом положении за счет смещающего элемента в виде пружины 35, закрепленной между рычажным механизмом 6 и частью рукоятки 2 таким образом, что усилие смещения передается через рычажный механизм 6 как усилие сжатия на привод 3 и вынуждает его поворачиваться вокруг оси 4 в отпущенное положение. Когда привод 3 отпущен, исполнительный орган 9, расположенный на первом конце трубчатого элемента 7, находится в полностью открытом положении. Специалисту понятно, что в альтернативном варианте реализации настоящего изобретения исполнительный орган 9 может находиться в полностью закрытом положении при отпущенном положении привода 3.
В соответствии с альтернативным вариантом реализации настоящего изобретения (не показан) инструмент не содержит смещающего элемента. Когда действие внешнего усилия на привод 3 прекращается, привод 3 в соответствии с этим альтернативным вариантом реализации остается в основном в том положении, в котором он находился, когда прекратилось действие усилия.
Рычажный механизм содержит соединительное звено 3', образованное частью привода 3 (на чертежах представлена пунктирной линией), и соединительное звено 5, соединяющее звено 3' с соединительным звеном 6. Соединительное звено 3' привода 3 может поворачиваться вокруг оси 4, соединенной с рукояткой 2. Поворот соединительного звена 3' ограничен углом между ограничителем 30, выступающим от внутренней поверхности рукоятки 2, и, например, упором одного конца привода 3 на рукоятку 2.
Соединительное звено 5 первым концом поворотным образом соединено с концом соединительного звена 3' поворотным соединением 40 и вторым концом поворотным образом соединен с нижним концом соединительного звена 6 поворотным соединением 44. Второй конец соединительного звена 6 поворотным образом соединен с рукояткой 2 поворотным соединением 46.
Трубчатый элемент 7, известный как таковой, соединен с верхней частью соединительного звена 6 и приводит в действие исполнительный орган 9 в ответ на маятниковое движение соединительного звена вокруг поворотного соединения 46.
Когда привод 3 отпущен, соединительные звенья 3' и 5 образуют угол α0 и угол β0, соответственно, с прямой линией L, проходящей через поворотное соединение в виде оси 4 и поворотное соединение 44, см. фиг.6.
Когда на привод 3 действует внешнее усилие, соединительные звенья 3' и 5 поворачиваются по направлению к линии L до тех пор, пока привод 3 не упрется в механический ограничитель 30. В этом положении при полностью взведенном приводе соединительные звенья 3' и 5, а также поворотное соединение 40 предпочтительно совпадают с линией L. На фиг.3 и 4 привод 3 представлен в частично взведенном положении и практически полностью взведенном положении соответственно. Соответственно, исполнительный орган 9 находится в частично закрытом и по существу закрытом положениях. Когда на привод 3 действует внешнее усилие, приложенное пальцем (не показан), и углы α0 и β0 соединительных звеньев 3' и 5 уменьшены до углов α и β соответственно, поворотное соединение 44 перемещается на расстояние ΔL. Это перемещение ΔL вызывает поворот соединительного звена 6 вокруг поворотного соединения 46 и, в то же время, приводит к тому, что трубчатый элемент 7, конец которого соединен с соединительным звеном 6, перемещается, так что исполнительный орган 9 перемещается таким образом, что захват, или раскрытие, уменьшается.
Перемещение ΔL поворотного соединения 44 из положения, при котором привод 3 отпущен, и до взведенного положения привода 3 может быть несколько упрощенно выражено следующей формулой:
ΔL=L3'·cosα+L5·cosβ-(L3'·cosao+L5·cosβ0),
где L3' - длина соединительного звена 3';
L5 - длина соединительного звена 5;
α и β - углы, образуемые между соединительными звеньями 3' и 5 и линией L, когда привод 3 находится во взведенном положении;
α0 и β0 - наибольшие углы, образуемые между соединительными звеньями 3' и 5 и линией L, когда привод 3 отпущен.
На фиг.7 представлен график, демонстрирующий взаимосвязь между относительным движением исполнительного органа 9, например, степенью «захвата» захватного устройства или ножниц и относительным перемещением привода 3 в рукоятку 2, в соответствии с одним из вариантов реализации настоящего изобретения. Вертикальная ось представляет степень захвата или раскрытия, в котором 100% - максимальный захват и 0% - полностью закрытое положение. Горизонтальная ось представляет перемещение привода 3 от отпущенного положения (0%) к полностью взведенному положению (100%). На графике видно, что при приблизительно 50%-ном взведении привода 3 захват исполнительного органа приблизительно на 75% закрыт, то есть «передача» между движением привода 3 и раскрытием исполнительного органа 9 относительно велика в обычно «неэффективном» диапазоне и относительно мала в обычно эффективном диапазоне с раскрытием захвата исполнительного органа от 0 до 50%. В эффективном диапазоне низкое передаточное отношение очень полезно для хирурга, так как обеспечивает наилучшее возможное управление при работе, например, с живыми органами.
Другим важным свойством настоящего изобретения является то, что действие усилия, приложенного к приводу 3, по существу, обратно пропорционально «передаче» между относительным перемещением привода 3 и относительным перемещением исполнительного органа 9, или захвата. Это означает, что самое большое усилие исполнительного органа 9 достигается в обычно эффективном диапазоне с раскрытием захвата исполнительного органа, составляющим от 0 до 50%.
Благодаря низкому передаточному отношению между перемещением привода 3 и перемещением исполнительного органа 9 пользователь, например хирург, имеет более эффективный инструмент с улучшенным управлением в обычно эффективном рабочем диапазоне, в связи с чем количество дополнительной энергии, необходимой при использовании лапароскопических инструментов в известных из уровня техники решениях по сравнению с открытой хирургией, значительно уменьшается.
Инструмент 1 содержит регулируемую заднюю часть 8, представленную на фиг.1-4 в самом выступающем положении. Задняя часть 8 фиксируется в нужном положении при помощи фиксатора 41, образованного фиксирующим элементом 42, поворотным образом соединенным первым концом с частью рукоятки 2 поворотным соединением 43. На втором конце фиксирующего элемента 42 имеется лапка 47, предназначенная для захвата одного из нескольких (показано четыре) зубьев 48, комплементарных по форме лапке 47, выступающих от внутренней нижней поверхности задней части 8. Фиксирующий элемент 42 смещается при помощи пружины 50 таким образом, что лапка 47 опирается на один из зубьев 48. Для регулировки желаемого положения задней части 8 к регулировочной кнопке 52 прикладывается усилие, противодействующее усилию пружины 50, таким образом разъединяя лапку 47 с одним из зубьев 48. Когда лапка 47 расцепляется с зубцом 48, задняя часть 8 смещается в свое крайнее наружное положение смещающим элементом 51, выступающим от внутренней поверхности задней части 8 и опирающимся свободным концом на противодействующий элемент 53 в рукоятке 2.
На чертежах показано, что задняя часть 8 поворотным образом соединена с рукояткой 2 при помощи поворотного соединения 55, расположенного в верхней части рукоятки 2. Специалисту понятно, что поворотное соединение для регулируемой задней части 8 может располагаться в любом другом месте, например в нижней части рукоятки 2, и что регулируемая задняя часть 8 может иметь несколько поворотных частей и конфигураций, отличающихся от представленных на чертежах.
В альтернативных вариантах реализации настоящего изобретения (не показаны) рукоятка 2 инструмента может иметь средства регулировки также в передней части и/или в одной или обеих боковых частях.
На фиг.5 регулируемая задняя часть 8, по существу, смещена внутрь рукоятки 2, так что рукоятка 2 находится в практически наименее выступающем положении, и расстояние между приводом 3 и задней частью 8 практически наименьшее из возможных. Задняя часть 8 рукоятки 2 может быть зафиксирована в нескольких промежуточных положениях между положением, представленным, например, на фиг.5, и положением, представленным, например, на фиг.1. Такая возможность регулирования важна для достижения наилучшей возможной адаптации рукоятки 2 к размеру руки хирурга, обеспечивающей оптимальное удобство при использовании.
На чертежах нижний конец регулируемой задней части 8 содержит разъем 60 известного, по существу, типа для подключения электропитания. Разъем 60 позволяет подключить напряжение к проводам 62, по которым электрический ток поступает к исполнительному органу 9 для осуществления монополярного резания при хирургических операциях. Разъем 60 может быть расположен в других частях инструмента 1.
Специалистам понятно, что привод 3, представленный в настоящем варианте реализации с так называемым открытым пальцевым захватом, может иметь так называемый закрытый пальцевой захват.
В альтернативном варианте реализации изобретения (не показан) инструмент содержит храповой механизм, состоящий из храповой рейки и собачки, по существу, комплементарной формы, который предназначен для избирательной фиксации привода 3 в желаемом положении. В соответствии с предпочтительным вариантом реализации настоящего изобретения храповая рейка является неотъемлемой частью рычажного механизма 6. Собачка избирательно сцепляется или расцепляется с храповой рейкой при помощи переключателя, расположенного в рукоятке 2 и соединенного с собачкой гибким элементом, предназначенным для приложения смещающего усилия к собачке. Переключатель и привод 3 предпочтительно имеют независимое управление.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНСТРУМЕНТ ДЛЯ ИСПОЛЬЗОВАНИЯ В ЛАПАРОСКОПИЧЕСКОЙ ХИРУРГИИ | 2005 |
|
RU2397726C2 |
| ЭНДОСКОПИЧЕСКИЙ ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ | 1996 |
|
RU2117441C1 |
| СБОРНЫЙ УЗЕЛ РЕТРАКТОРА ТКАНЕЙ | 2012 |
|
RU2585730C2 |
| РОБОТИЗИРОВАННАЯ ХИРУРГИЧЕСКАЯ СИСТЕМА ДЛЯ ВЫПОЛНЕНИЯ МИНИМАЛЬНЫХ ИНВАЗИВНЫХ ВМЕШАТЕЛЬСТВ | 2007 |
|
RU2412800C2 |
| ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ ДЛЯ НАЛОЖЕНИЯ СКОБОК, СОДЕРЖАЩИЙ МНОГОХОДОВОЙ ВЫТАЛКИВАЮЩИЙ МЕХАНИЗМ С РОТОРНОЙ ПЕРЕДАЧЕЙ | 2005 |
|
RU2434592C2 |
| Способ изготовления индивидуальных эргономических рукояток лапароскопических хирургических инструментов с использованием трехмерной печати | 2018 |
|
RU2706996C1 |
| УСТРОЙСТВО А.Н.ЧУГУНОВА ДЛЯ ДИССЕКЦИИ БИОЛОГИЧЕСКИХ ТКАНЕЙ | 1999 |
|
RU2249435C2 |
| МЕДИЦИНСКАЯ РОБОТИЗИРОВАННАЯ СИСТЕМА | 2007 |
|
RU2412799C2 |
| ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ ДЛЯ НАЛОЖЕНИЯ СКОБОК, СОДЕРЖАЩИЙ МНОГОХОДОВЫЙ ВЫТАЛКИВАЮЩИЙ МЕХАНИЗМ С НЕРАВНОМЕРНЫМ ШАГОМ И РОТОРНОЙ ПЕРЕДАЧЕЙ | 2005 |
|
RU2434593C2 |
| УСТРОЙСТВО ДЛЯ ЭНДОХИРУРГИЧЕСКИХ МАНИПУЛЯЦИЙ | 1995 |
|
RU2096997C1 |




Изобретение относится к хирургическим инструментам. Инструмент содержит рукоятку. Рукоятка имеет привод для манипулирования через рычажный механизм исполнительным органом. Исполнительный орган установлен на первом конце трубчатого элемента, который соединен с рукояткой инструмента. Рычажный механизм обеспечивает нелинейное перемещение привода по отношению к перемещению исполнительного органа. В результате простой инструмент с ручным управлением и эргономически правильными свойствами позволяет более эффективно использовать мышцы хирурга для управления курком или приводом и лучше управлять инструментом. 6 з.п. ф-лы, 7 ил.
1. Инструмент для использования в лапароскопической хирургии, содержащий рукоятку, имеющую привод для манипулирования через рычажный механизм исполнительным органом, установленным на первом конце трубчатого элемента, причем второй конец трубчатого элемента проходит в рукоятку инструмента и соединен с рычажным механизмом, отличающийся тем, что рычажный механизм образован ножницеобразным звеном, соединенным первым концом с рукояткой при помощи первого поворотного соединения, и рычагом, соединенным вторым концом с рукояткой при помощи второго поворотного соединения, причем ножницеобразное звено вторым концом соединено с первым концом рычага при помощи третьего поворотного соединения.
2. Инструмент по п.1, отличающийся тем, что трубчатый элемент соединен с рычагом в части, расположенной между третьим поворотным соединением и вторым поворотным соединением.
3. Инструмент по п.2, отличающийся тем, что трубчатый элемент соединен с рычагом в части, расположенной ближе ко второму поворотному соединению, чем к третьему поворотному соединению.
4. Инструмент по любому из предшествующих пунктов, отличающийся тем, что рукоятка содержит, по меньшей мере, одну регулируемую часть для регулирования размера рукоятки в зависимости от требований пользователя.
5. Инструмент по п.4, отличающийся тем, что, по меньшей мере, одна регулируемая часть расположена в задней части рукоятки.
6. Инструмент по п.1, отличающийся тем, что содержит смещающий элемент для смещения привода в крайнее выступающее положение.
7. Инструмент по п.6, отличающийся тем, что смещающий элемент выполнен в виде пружины.
| US 5735873 А, 07.04.1998 | |||
| US 5868784 А, 09.02.1999 | |||
| US 5976121 А, 02.11.1999 | |||
| ЭНДОСКОПИЧЕСКИЙ ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ | 1996 |
|
RU2117441C1 |
| US 4633869 C1, 06.01.1987 | |||
| US 4643190 A, 17.02.1987 | |||
| ЭНДОСКОПИЧЕСКИЙ ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ | 1995 |
|
RU2127557C1 |

