Область техники, к которой относится изобретение
Изобретение относится к устройству, предназначенному для оптического обследования открытых поверхностей предметов (объектов), по меньшей мере, с двух различных направлений наблюдения. Указанное устройство содержит осветительные блоки, освещающие открытые поверхности объектов, а также сенсорный узел, детектирующий интенсивность излучения, отраженного различными участками открытых поверхностей объектов, и преобразующий излучение в электронную форму.
Уровень техники
Типичная установка для оптического обследования содержит источник излучения и съемочный аппарат, состоящий из объектива и приемной плоскости, совпадающей с плоскостью изображения объектива. Изображение, созданное объективом в плоскости изображения, можно исследовать и сохранять, например, посредством ПЗС-ячейки (ПЗС - прибор с зарядовой связью) или матрицы КМОП-элементов (КМОП - комплементарные металлооксидные полупроводники), известным образом преобразующих изображение в оптоэлектронный сигнал. Указанная ячейка состоит из светочувствительных элементов, расположенных в виде матрицы размером, например, 256×256 элементов (пикселей). При этом свойства съемочного аппарата имеют сходство со свойствами обычной электронной фотографической камеры. С другой стороны, сформированная пикселями приемная плоскость может иметь, например, формат 1024×1, что соответствует так называемой "линейной камере". В данном описании имеется в виду съемочный аппарат упомянутого выше типа электронной камеры. Его можно применять для получения кинокадров или, при желании, неподвижных фотографий; в других сферах применения за такими устройствами закреплены наименования "видеокамера" или "цифровая камера". В зависимости от различных положений объекта съемки в зоне измерений стандартные оптические узлы съемочного аппарата изображают этот объект различным образом. Вблизи оптической оси объектива, т.е. в своей центральной части, объект изображается лучами, идущими под прямыми углами к аппарату, а краям его соответствует другой угол наклона, причем указанный угол увеличивается по мере удаления изображаемой зоны от оптической оси. Такое изображение называют центральной проекцией.
При проведении соответствующего измерения объекта и общего контроля качества с использованием указанной проекции обычно возникают нежелательные погрешности, которые можно скорректировать за счет применения телецентрической оптики. В этом варианте все пучки, отраженные от объекта, проходят параллельно оптической оси, т.е. все участки объекта рассматриваются в одной и той же плоской проекции. В телецентрических объективах ближайшие к объекту линза или вогнутое зеркало должны иметь ширину, по меньшей мере, эквивалентную соответствующему размеру объекта. В результате оптическое оборудование, состоящее из обычных линз и/или зеркал, становится тяжелым и объемистым. В Европейском патенте №1089106 приведено описание относительно легкого и простого устройства, позволяющего решить указанные проблемы. В предлагаемой телецентрической схеме используется зеркало типа параболического цилиндра (планарное параболическое зеркало) типа полоски, причем в его фокальной плоскости помещена апертурная диафрагма собственно объектива. В свою очередь, указанный объектив встроен в нетелецентрический съемочный аппарат, посредством которого получают изображение на светочувствительной приемной плоскости.
Часто возникает необходимость измерить и/или обследовать объект не только с одного специфического направления, но также и с других направлений. Так, например, может оказаться необходимым контроль пиленого лесоматериала с направлений, ориентированных на две его противолежащие стороны, или со всех четырех сторон. Очевидное решение достигается посредством использования четырех устройств, ориентированных по направлениям к верхней, нижней и боковым поверхностям объекта, но это приводит к высоким затратам на оборудование. Альтернативный подход заключается в поворачивании объекта и подаче его четыре раза через зону, изображение которой формируется телецентрическим блоком. Однако, во-первых, с точки зрения производства такая конструкция функционирует медленно, а во-вторых, проблематичным является соотнесение данных, характеризующих изображение и полученных на различных сторонах объекта. Патентный документ WO 94/24516 описывает установку, предназначенную для измерения ширины перемещающегося объекта с применением двух параболических зеркал, связанных с одним съемочным аппаратом, совместно с протяженным источником излучения, обеспечивающим наличие фонового освещения. Для измерения толщины объекта используют лазер, включенный в установку, и второй съемочный аппарат, а если это необходимо, - второй лазер и третий съемочный аппарат. Указанная установка позволяет измерить в различных проекциях только габаритные размеры объекта.
В патентном документе DE 4104501 описана установка, предназначенная для определения границы между заболонной и сердцевинной сторонами двух ровных поверхностей пиленого лесоматериала, такого как планки и доски. Разница между этими противолежащими сторонами идентифицируется с использованием различия соответствующих плотностей волокон, т.е. плотностей годичных колец. Для определения указанных различающихся плотностей предлагается пропустить пиленый лесоматериал, по меньшей мере, между одной парой датчиков, расположенных напротив друг друга. Указанные датчики состоят из излучателя и приемника, работающих в интервале видимого или инфракрасного излучения. Датчики идентифицируют годичные кольца, исходя из различия отражательной способности смежных позиций на пиленом лесоматериале.
Согласно указанному патентному документу эти исходные данные от противолежащих датчиков, соотносящиеся с различиями оптической плотности по отражению, поступают в сравнивающее устройство, которое с помощью не представленных в документе программных средств вычисляет, какая из двух противолежащих сторон является сердцевиной, а какая, соответственно, заболонью. Внутренняя структура датчиков не описана вообще, однако чертежи, приложенные к документу, и использованный термин "приемопередатчик" позволяют заключить, что датчик в каждый момент времени детектирует только один пиксель, причем без применения каких-либо оптических средств. В документе не указано, основывается измерение на усредненных значениях отражения от увеличенных участков объекта (в случае пикселя большого размера) или на значениях отражения, измеренных датчиками или множеством датчиков, имеющими возможность перемещаться в поперечном направлении (в случае пикселя маленького размера). Другими словами, установка по указанному документу позволяет проводить наблюдение двух поверхностей объекта, однако при этом количество датчиков, по меньшей мере, эквивалентно количеству обследуемых поверхностей. Кроме того, не указана методика обследования всей площади даже одной из поверхностей объекта.
Раскрытие изобретения
Таким образом, настоящее изобретение решает задачу разработки устройства, обеспечивающего возможность обследования поверхности объекта во всех его поперечных направлениях посредством оптических средств, точнее - с помощью электронного съемочного аппарата. Это означает, что изобретение позволяет получать изображения верхней, нижней и боковых поверхностей объекта и обследовать указанные поверхности. Другими словами, объект можно наблюдать с четырех попарно взаимно перпендикулярных направлений, причем обычно они лежат в одной плоскости или, по меньшей мере, во взаимно параллельных плоскостях. Конечно, в зависимости от формы объекта допустим альтернативный вариант, когда объект изображается и обследуется только с трех направлений, выбранных в соответствии с поставленной проблемой. Второй задачей изобретения является разработка устройства, позволяющего проводить обследование описанного выше типа с использованием изображения и, с целью удерживания расходов на низком уровне, минимального количества съемочных аппаратов. Третья задача, решаемая изобретением, заключается в разработке устройства, позволяющего проводить подобное обследование поверхностей подвижного предмета (объекта), открытого с различных направлений, причем обследование осуществляется таким образом, чтобы при желании изображались и обследовались все поверхности удлиненных предметов. Четвертая задача сводится к разработке устройства, обеспечивающего возможность применения результатов обследования с использованием изображения в анализе всех видов дефектов и свойств объекта. Это означает, что соответствующее устройство не будет накладывать ограничений на исследуемые свойства объекта. Последней задачей изобретения является разработка такого устройства, которое позволяло бы проводить обследование с использованием изображения, не прибегая к повторам и используя аппаратуру, не имеющую движущихся деталей.
Проблемы, сформулированные выше, и поставленные задачи решаются с помощью устройства согласно изобретению, характеризуемого признаками, которые включены в отличительную часть п.1 формулы.
Одно из главных преимуществ изобретения заключается в том, что предлагаемое устройство позволяет получать изображения всех поверхностей перемещающегося объекта, за исключением торцов, перпендикулярных направлению движения, а также использовать электронный съемочный аппарат для обследования поверхностей и потенциального измерения их параметров. Другим преимуществом изобретения является предоставляемая возможность получения таких изображений всего объекта при его однократном прохождении через прибор, входящий в состав устройства, с применением единственного съемочного аппарата (хотя при желании можно использовать и два аппарата), для, по существу, одновременного получения изображений всех наружных поверхностей объекта. Еще одно преимущество изобретения сводится к одновременному удерживанию всех наружных поверхностей объекта в пределах глубины резкости электронного съемочного аппарата, а также к исключению центральной проекции из рассмотрения и замещению ее реальными плоскими проекциями. Кроме того, устройство по изобретению имеет компактную и прочную конструкцию, тем самым гарантируя отличную техническую надежность.
Краткое описание чертежей
Далее изобретение будет описано более подробно со ссылками на прилагаемые чертежи.
Фиг.1 и 2 представляют собой схематичные изображения предпочтительного варианта осуществления устройства по изобретению, предназначенного для обследования открытых поверхностей объекта с четырех направлений наблюдения. Указанное обследование проводят с применением единственного телецентрического блока, формирующего изображение и содержащего видеокамеру. На фиг.1 устройство изображено на виде по направлению, перпендикулярному направлению перемещения движущегося объекта, а на фиг.2 - соответственно на виде по направлению перемещения объекта.
Фиг.3А-6А и 3В-6В на видах по взаимно перпендикулярным направлениям иллюстрируют по отдельности пучки излучения с четырех направлений наблюдения. На фиг.3А, 3В и 4А, 4В показаны устройства для обследования соответственно нижней и верхней поверхностей объекта. С помощью установок, представленных на фиг.5А, 5В и 6А, 6В, обследуют соответственно его левую и правую боковые стороны.
Фиг.7 представляет собой схематичное изображение второго варианта осуществления устройства по изобретению, предназначенного для обследования открытых поверхностей объекта с четырех направлений. Указанное обследование проводится с применением единственного телецентрического блока, который содержит съемочный аппарат, формирующий двумерное изображение поверхности. Устройство изображено на виде по направлению перемещения движущегося объекта, т.е. в той же проекции, что и устройство, показанное на фиг.2.
Фиг.8 представляет собой схематичное изображение третьего варианта осуществления устройства по изобретению, предназначенного для обследования открытых поверхностей объекта с четырех направлений. Указанное обследование проводят с применением единственного телецентрического блока, формирующего изображение. Устройство изображено на виде по направлению перемещения объекта, т.е. в той же проекции, что и устройства, показанные на фиг.2 и 7.
Фиг.9 представляет собой схематичное изображение четвертого варианта осуществления устройства по изобретению, предназначенного для обследования открытых поверхностей объекта с четырех направлений. Указанное обследование проводят с применением двух телецентрических блоков, формирующих изображение.
Устройство изображено на виде по направлению перемещения объекта, т.е. в той же проекции, что и устройства, показанные на фиг.2, 7 и 8.
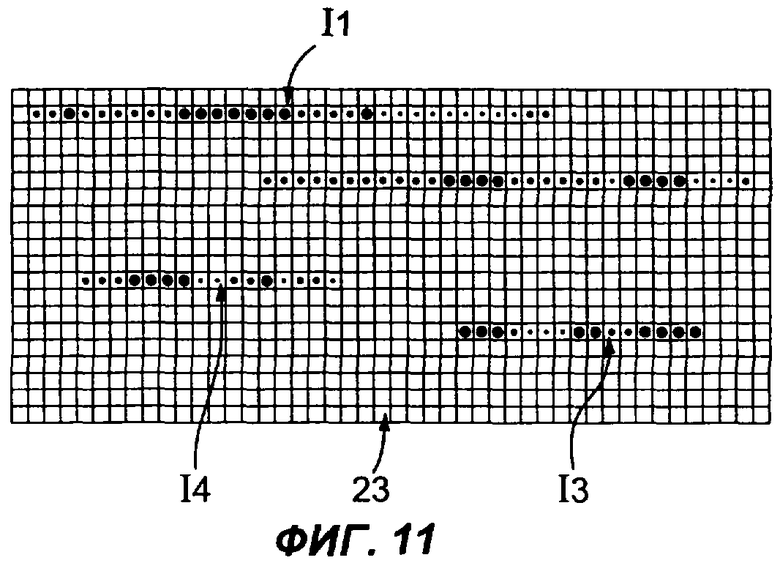
Фиг.10 и 11 иллюстрируют принцип действия приемной плоскости телецентрического съемочного аппарата, использованного в изобретении. В указанной плоскости находятся светочувствительные пиксели линейного съемочного аппарата или съемочного аппарата, получающего изображение двумерной поверхности (см. соответственно фиг.10 и 11).
Осуществление изобретения
Прилагаемые чертежи иллюстрируют устройство, предназначенное для оптического обследования открытых поверхностей 1, которые определяют профили объектов 10 (имеются в виду главным образом объекты, перемещающиеся в продольном направлении), таких как пилопродукция и строганый пиломатериал, по меньшей мере, с двух различных направлений Р1, Р2 наблюдения. Такое же обследование можно провести и для объектов, состоящих из других материалов. В данном контексте под открытой поверхностью 1 подразумевается поверхность, видимая снаружи, т.е. предоставляющая возможность обследования. При этом данное определение не распространяется, например, на внутренние поверхности труб или пустотелых профилей, т.е. на полости. В данном описании для открытых поверхностей, как правило, используется цифровое обозначение "1", которое соотносится с любой открытой поверхностью объекта. Уточняющие обозначения 1с и 1d применяются для идентификации боковых поверхностей, но только в тех ситуациях, когда необходимо подчеркнуть различие между ними. Это же относится и к обозначениям 1b и 1а (соответственно нижняя и верхняя поверхности). Объекты перемещают через устройство в направлении DL(см.фиг.1). Важную часть устройства по изобретению составляют осветительные блоки 20, освещающие открытые поверхности объекта. Указанные блоки могут состоять из любых ламп, испускающих адекватное количество оптического излучения в надлежащем диапазоне длин волн. Можно применять источники как рассеянного, так и направленного излучения, однако оно должно быть некогерентным.
Таким образом, поскольку никаких других требований, кроме обеспечения хорошей общей подсветки, к источникам излучения не предъявляется, указанные источники могут строиться на основе ламп накаливания, флуоресцентных трубок, светодиодов или любых других излучателей такого рода, причем как известных, так и новых типов. По своей природе обследование открытых поверхностей 1 объектов 10 требует применения освещения на одной или нескольких специфических длинах волн, которые лежат в широкой или узкой полосе в пределах видимого, инфракрасного, ультрафиолетового диапазонов или их комбинаций. В этом контексте представляется существенным, что к осветителю не предъявляется никаких требований, касающихся параллельного направления пучков или когерентности, т.е. в рамках изобретения нет необходимости применять один или несколько лазеров.
Кроме того, устройство по изобретению содержит сенсорный узел, детектирующий интенсивность излучения, отраженного различными участками открытых поверхностей 1 объектов, и преобразующий ее в электронную форму. В предпочтительном варианте осуществления изобретения компонентом указанного узла является первый телецентрический блок 11, формирующий изображение. В блок 11 входят нетелецентрический съемочный аппарат 21 с объективом 22 и приемной плоскостью 23 (совпадающей с плоскостью изображения), сформированной светочувствительными пикселями и имеющей оптическую ось 9, а также вогнутое зеркало 24 в форме параболического цилиндра или иное параболическое зеркало, причем в фокальной плоскости F указанного зеркала находится апертурная диафрагма 25 объектива. Телецентрический блок 11 отображает зону К, лежащую, по меньшей мере, в одной плоскости. Указанная изображаемая зона формируется за счет совместного действия таких факторов, как угол поля зрения съемочного аппарата и вогнутого зеркала (или соответствующей линзы), расположенного (расположенной) между аппаратом и объектом. Этим определяется взаимодействие блока, формирующего изображение, с внешними параллельными пучками.
При использовании линейного съемочного аппарата изображаемая зона К вытянута, по существу, в одном направлении (соответствующая приемная плоскость показана на фиг.10). Однако можно обеспечить ориентацию зоны К в двух различных направлениях, если применить съемочный аппарат, получающий двумерное изображение поверхности. Приемная плоскость такого аппарата показана на фиг.11. В обоих случаях речь идет о реальной зоне поверхности, но линейный аппарат использует, в первую очередь, одну координату, а аппарат, получающий двумерное изображение поверхности, - обе координаты плоскости изображения. К тому же в последнем из указанных вариантов изображаемые зоны, соответствующие различным направлениям в плоскости и различным оптическим осям, могут иметь различающиеся размеры. Тем не менее, в данном описании все они описываются термином "изображаемая зона К". Телецентрические блоки, формирующие изображение, в достаточной степени известны и поэтому в данном случае детально не рассматриваются. Блок такого типа, особо предпочтительный в связи с настоящим изобретением, описан в предшествующей публикации ЕР 1089106 заявителя. Для настоящего изобретения предпочтительно применение телецентрического блока. С его помощью нетелецентрический съемочный аппарат приобретает телецентрические свойства за счет использования вогнутого зеркала (в особенности вогнутого зеркала в виде полоски, а наиболее предпочтительно зеркало в виде полоски, соответствующей зеркалу в форме параболического цилиндра, как это поясняется в упомянутой выше публикации).
Следует понимать, что в рамках теории изображения не существует препятствий для применения при формировании изображения телецентрического блока какого-либо иного типа. Такие блоки можно использовать с одинаковым успехом при условии, что имеется возможность решить проблемы, связанные с затратами и удобством в эксплуатации. Если в настоящем устройстве применяют, кроме того, второй телецентрический блок 12, формирующий изображение (см. фиг.9), используют блок того же типа, что и первый блок 11, т.е. блок 12 также содержит нетелецентрический съемочный аппарат 21, состоящий из объектива 22 и приемной плоскости 23, сформированной светочувствительными пикселями, а также вогнутое зеркало 24 в форме параболического цилиндра с апертурной диафрагмой 25 объектива в своей фокальной плоскости F. Таким образом, понятие "телецентрический блок, формирующий изображение" в контексте описания, относится как к первому, так и ко второму блокам 11 и 12.
Согласно изобретению устройство, кроме того, содержит уголковое зеркало 13, состоящее из двух граней 3а и 3b. Эти грани представляют собой плоские зеркала, в предпочтительном варианте имеющие форму полоски, как это показано на фиг.1 и 3А-6А. Оптическая ось 9 телецентрического блока 11 или, в альтернативном варианте, оптические оси телецентрических блоков 11, 12 параллельны биссектрисе 14 уголкового зеркала 13, причем это условие относится также к продолжениям (с учетом отражений света от соответствующих зеркал) биссектрисы и оптических осей, показанным на фиг.2, 3В-6В и 7-9. Очевидным следствием из этого является тот факт, что при повороте системы в другое физическое положение посредством зеркал все прочие параметры изменяются согласованным образом, сохраняя прежние соотношения. В наиболее типичном случае биссектриса 14 уголкового зеркала 13 и оптическая ось 9 телецентрического блока 11, формирующего изображение, или их продолжения (построенные с учетом отражений света от соответствующих зеркал) находятся на одной линии, как это можно видеть на фиг.2, 3В-6В и 7, 8.
Кроме того, устройство по изобретению содержит, по меньшей мере, одно первое вспомогательное зеркало 8а внутри изображаемой зоны К телецентрического блока. Объект 10 помещают между гранями 3а и 3b уголкового зеркала 13. Если требуется изобразить и обследовать все открытые поверхности 1 объекта 10, причем в особенности боковые поверхности 1с, 1d, ориентированные параллельно оптической оси 9 и биссектрисе 14, объект нужно полностью поместить внутри зоны, определенной гранями 3а, 3b уголкового зеркала 13 и линией (или плоскостью), соединяющей верхние кромки 26 граней. С другой стороны, если желательно изобразить и обследовать только две противолежащие поверхности, ориентированные перпендикулярно оптической оси 9 и биссектрисе 14 (т.е. верхнюю поверхность 1а и нижнюю поверхность 1b), достаточно, чтобы внутри зоны, которая определена гранями 3а, 3b уголкового зеркала 13 и линией (или плоскостью), соединяющей верхние кромки 26 указанных граней, находилась только нижняя поверхность 1b, т.к. при таком расположении она изображается с участием граней уголкового зеркала, а лучи от верхней поверхности 1а будут направлены непосредственно к телецентрическому блоку. Предпочтительно, чтобы угол α между гранями 3а и 3b зеркала 13 составлял 90°, как это можно видеть на прилагаемых чертежах.
Объект 10 желательно поместить между гранями зеркала таким образом, чтобы он находился внутри зоны, определенной биссектрисой 14 и одной из граней (3а или 3b). Тогда нижняя поверхность 1b изображается с участием обеих граней зеркала 13, а каждая из боковых сторон 1с и 1d - с участием только одной грани (3а или 3b) указанного зеркала. В варианте с применением уголкового зеркала 13 первое направление Р1 наблюдения, ориентированное по направлению к нижней поверхности 1b объекта 10 (т.е. по линии, которая ведет от блока, формирующего изображение, к задней стороне объекта), образуется с участием обеих граней 3а и 3b уголкового зеркала 13, как это проиллюстрировано на фиг.1-9. Второе направление Р2 наблюдения, ориентированное по направлению к верхней поверхности 1а объекта 10 (т.е. по направлению к его фронтальной стороне, наблюдаемой от блока, формирующего изображение), образуется без участия уголкового зеркала, поскольку указанное направление просматривается непосредственно. Как третье, так и четвертое направления Р3, Р4, ориентированные по направлению к вертикальным поверхностям 1с и 1d объекта 10 (т.е. по направлению к его боковым поверхностям, наблюдаемым от блока, формирующего изображение), образуются с участием одной из граней (3а или 3b) уголкового зеркала 13, как это можно видеть на фиг.1-9.
Далее, согласно изобретению направление формирования изображения, параллельное оптической оси 9 телецентрического блока 11, 12, сориентировано соответствующим образом относительно комбинации объекта 10 и уголкового зеркала 13, причем внутри изображаемой зоны К, отображаемой телецентрическим блоком, устройство содержит вспомогательные зеркала 8, находящиеся между данным блоком и объектом. На чертежах они отмечены общим цифровым обозначением 8, относящимся к вспомогательному зеркалу любого типа. Конкретные цифровые обозначения 8a-8i применяются только в тех случаях, когда желательно подчеркнуть различие между вспомогательными зеркалами, расположенными у различных участков и/или в различных позициях. Указанные вспомогательные зеркала ориентированы таким образом и размещены на таких расстояниях от телецентрических блоков 11 и/или 12, чтобы при прохождении лучей с отражением от зеркал компенсировались разности длин пути (расстояний) до изображения по направлениям Р1, и/или Р2, и/или Р3, и/или Р4 по траектории с отражением от двух граней 3а и 3b, или с отражением от одной из указанных граней, или по траектории, не пересекающейся с уголковым зеркалом.
Термины "расстояния до изображения" и "длины пути по направлениям наблюдения" означают расстояние, которое проходит пучок излучения (или луч), участвующий в формировании изображения, от поверхности объекта 1) с отражением от вспомогательных зеркал к расположению телецентрического блока, формирующего изображение, или 2) с отражением от одной из граней уголкового зеркала и от вспомогательных зеркал к расположению указанного блока, или 3) с отражением от поверхностей двух граней уголкового зеркала и, в некоторых вариантах, от вспомогательных зеркал к расположению указанного блока. Термин "разность расстояний до изображения" ("разность длин пути") означает разность длин путей лучей (пучков), измеренных по траекториям этих путей до изображения. Так, например, на фиг.7 показано, что длина m1 пути от нижней поверхности 1b объекта с отражением от двух граней уголкового зеркала имеет максимальное значение, длина m3 пути от первой боковой поверхности 1d объекта с отражением от одной грани уголкового зеркала несколько меньше, длина m4 пути от другой боковой поверхности 1 с объекта с отражением от второй грани уголкового зеркала еще короче, а длина m2 пути от верхней поверхности 1а объекта и без участия уголкового зеркала самая маленькая из всех перечисленных. Все указанные измерения проведены до одной и той же плоскости, поперечной относительно оптической оси (в данном случае это плоскость J, соединяющая верхние кромки 26 уголкового зеркала).
Разности m1 - m2, m1 - m3 и m1 - m4 между длинами путей (расстояниями) до изображения компенсируются вспомогательными зеркалами и промежутками между ними. В зависимости от взаимного положения съемочного аппарата и зеркала 24 в форме параболического цилиндра телецентрического блока, а также от общей ориентации указанного блока по отношению к комбинации уголкового зеркала и объекта вспомогательные зеркала можно расположить или индивидуально, или попарно вдоль путей до изображения, соответствующих конкретным предварительно выбранным направлениям Р1, и/или Р2, и/или Р3, и/или Р4 наблюдения, чтобы пучки излучения, участвующие в формировании изображения, отражались от указанных зеркал. Точные положения вспомогательных зеркал зависят от каждого конкретного приложения устройства, при этом специалист в данной области сможет установить эти зеркала на основе общих принципов оптики, исходя из данных, приведенных в настоящем описании и на прилагаемых чертежах. Поэтому данный вопрос более подробно рассматриваться не будет. Таким образом, наиболее существенная особенность предлагаемого устройства заключается в применении уголкового зеркала 13, отображающего тыльную и боковые стороны объекта 10, и вспомогательных зеркал 8, которые компенсируют разности указанных выше расстояний до изображения. Вогнутое параболическое зеркало или вогнутое зеркало 24 в форме параболического цилиндра, а также вспомогательные зеркала 8a-8i, 18 имеют форму полоски, а их отражающие поверхности ориентированы поперечно относительно оптической оси.
Фиг.7 иллюстрирует один из наиболее наглядных вариантов осуществления изобретения. В указанном варианте вогнутое зеркало 24 в форме параболического цилиндра обращено к объективу 22. С другой его стороны находится комбинация объекта и уголкового зеркала. Количество вспомогательных зеркал 8 устройства, по меньшей мере, равно числу желаемых направлений Р1-Р4 наблюдения объекта, т.е. для каждого такого направления предусмотрено наличие, по меньшей мере, одного вспомогательного зеркала 8d, 8с, 8а или 8е, отражающего лучи, которые переносят информацию от объекта 10 к телецентрическому блоку 11, формирующему изображение.
В более детальном изложении пучки излучения, создающие изображение (т.е. информация) от объекта, испытывая отражения, проходят следующие расстояния до изображения. Направление Р1 наблюдения нижней поверхности объекта: от нижней поверхности 1b с отражением от двух граней 3b и 3а уголкового зеркала 13 к вспомогательному зеркалу 8d, расположенному на маленьком расстоянии h1 от зеркала 24 в форме параболического цилиндра (т.е. от телецентрического блока 11, формирующего изображение), и далее к указанному блоку. Направление Р3 наблюдения боковой поверхности объекта: от боковой поверхности 1d с отражением от грани 3а уголкового зеркала 13 к вспомогательному зеркалу 8а, расположенному на увеличенном расстоянии h3 от указанного зеркала 24 (т.е. от телецентрического блока 11, формирующего изображение), и далее к указанному блоку. Направление Р4 наблюдения второй боковой поверхности объекта: от боковой поверхности 1с с отражением от другой грани 3b уголкового зеркала 13 к вспомогательному зеркалу 8е, расположенному на еще более удаленном расстоянии h4 от зеркала 24 в форме параболического цилиндра (т.е. от телецентрического блока 11, формирующего изображение), и далее к указанному блоку. Направление Р2 наблюдения верхней поверхности объекта: от верхней поверхности 1а к вспомогательному зеркалу 8с, расположенному на максимальном расстоянии h2 от указанного зеркала 24 (т.е. от телецентрического блока 11, формирующего изображение), и далее к указанному блоку. Расстояния h1, h2, h3 и h4 выбраны таким образом, чтобы соблюдались соотношения 2×h1+m1=2×h2+m2=2×h3+m3=2×h4+m4, при которых все стороны объекта наблюдаются телецентрическим блоком так, как если бы они находились на одинаковом расстоянии.
Фиг.8 иллюстрирует другой вариант осуществления изобретения, в котором вогнутое зеркало 24 в форме параболического цилиндра обращено и к объективу 22, и к комбинации объекта и уголкового зеркала. Указанное устройство содержит, по меньшей мере, одну из пар вспомогательных зеркал 8a/8b, 8c/8d, 8e/8f, расположенную на каждом из тех желаемых направлений Р2, и/или Р3, и/или Р4, для которых длина пути короче длины пути для направления Р1, и/или Р3, и/или Р4, имеющего максимальное расстояние до изображения. При этом каждая пара вспомогательных зеркал расположена таким образом, чтобы лучи, переносящие информацию, отражались от объекта 10 к телецентрическому блоку, формирующему изображение.
В более детальном изложении пучки излучения, создающие изображение, т.е. переносящие информацию от объекта, испытывая отражения, проходят следующие расстояния до изображения. Направление Р1 наблюдения нижней поверхности объекта: от нижней поверхности 1b с отражением от двух граней 3b и 3а уголкового зеркала 13 непосредственно к телецентрическому блоку 11, формирующему изображение. Направление Р3 наблюдения боковой поверхности объекта: от боковой поверхности 1d с отражением от грани 3а уголкового зеркала 13 к паре вспомогательных зеркал 8b и 8а (в таком порядке), расположенных на расстоянии h5 друг от друга, и далее к указанному блоку 11. Направление Р4 наблюдения другой боковой поверхности объекта: от боковой поверхности 1с с отражением от второй грани 3b уголкового зеркала 13 к паре вспомогательных зеркал 8f и 8е (в таком порядке), расположенных на увеличенном расстоянии h6 друг от друга, и далее к указанному блоку 11. Направление Р2 наблюдения верхней поверхности объекта: от верхней поверхности 1а к паре вспомогательных зеркал 8d и 8с (в таком порядке), расположенных на максимальном расстоянии h7 друг от друга, и далее к указанному блоку 11. Расстояния h5, h6 и h7 между зеркалами в указанных парах выбраны таким образом, чтобы соблюдались соотношения m1=2×h5+m2=2×h6+m3=2×h7+m4, при которых все стороны объекта наблюдаются телецентрическим блоком так, как если бы они находились на одинаковом расстоянии.
На фиг.1 и 2 в общем виде представлен предпочтительный вариант осуществления изобретения. В указанном варианте вогнутое зеркало 24 в форме параболического цилиндра и объектив 22 обращены к комбинации объекта и уголкового зеркала. Для наглядности на фиг.3-6 пути лучей, несущих информацию, и положения зеркал, соответствующие четырем направлениям Р1, Р2, Р3 и Р4 наблюдения в данном варианте осуществления, показаны раздельно друг от друга. При этом устройство содержит вспомогательное зеркало 18, общее для всех направлений наблюдения. Оно расположено по ходу лучей между зеркалом в форме параболического цилиндра и объектом и отражает к съемочному аппарату 21 лучи, несущие информацию и идущие от параболического зеркала. Кроме того, в устройстве находится, по меньшей мере, одна из пар вспомогательных зеркал 8a/8b, 8e/8b, 8d/8c, расположенная на каждом из тех желаемых направлений Р2, и/или Р3, и/или Р4, которые короче направления Р1, и/или Р3, и/или Р4, имеющего максимальное расстояние до изображения. При этом каждая пара вспомогательных зеркал расположена таким образом, чтобы лучи, переносящие информацию от объекта 10, отражались к телецентрическому блоку. Кроме того, указанный вариант осуществления может содержать, по меньшей мере, одну дополнительную пару вспомогательных зеркал 8h/8i, которая за счет отражений между указанными зеркалами удлиняет расстояние до изображения, соответствующее одному направлению Р1, и/или Р2, и/или Р3, и/или Р4 наблюдения или нескольким таким направлениям. В варианте осуществления, представленном на чертежах, зеркала 8h и 8i расположены на пути до изображения, соответствующем второму направлению Р2 наблюдения, как это видно на фиг.4А и 4В. Вообще говоря, возможны следующие варианты расположения дополнительных пар вспомогательных зеркал:
между основными вспомогательными зеркалами и лучами, идущими от объекта и несущими информацию, или
между основными вспомогательными зеркалами и телецентрическим блоком, формирующим изображение, или
между зеркалами основных вспомогательных пар, или
между парами основных вспомогательных зеркал и лучами, идущими от объекта и несущими информацию, или
между парами основных вспомогательных зеркал и телецентрическим блоком, формирующим изображение.
В более детальном изложении пучки излучения, создающие изображение, т.е. переносящие информацию от объекта, испытывая отражения, проходят следующие расстояния до изображения. Направление Р1 наблюдения нижней поверхности объекта: от нижней поверхности 1b с отражением от двух граней 3b и 3а уголкового зеркала 13 непосредственно к телецентрическому блоку 11, формирующему изображение, который в данном варианте содержит общее вспомогательное зеркало 18. Направление Р3 наблюдения боковой поверхности объекта: от боковой поверхности 1d с отражением от грани 3а уголкового зеркала 13 к паре вспомогательных зеркал 8b и 8а (в таком порядке), расположенных одно от другого на некотором расстоянии, и далее к указанному блоку 11. Направление Р4 наблюдения второй боковой поверхности объекта: от боковой поверхности 1с с отражением от другой грани 3b уголкового зеркала 13 к паре вспомогательных зеркал 8b и 8е (в таком порядке), расположенных на увеличенном расстоянии одно от другого, и далее к указанному блоку 11. Направление Р2 наблюдения верхней поверхности объекта: от верхней поверхности 1а сначала к паре вспомогательных зеркал 8d и 8с (в таком порядке) и от них к паре вспомогательных зеркал 8h и 8i (в таком порядке), причем этим парам зеркал соответствует максимальная суммарная длина пути луча, и далее к указанному блоку 11. Расстояния между парами вспомогательных зеркал и их позиции выбраны таким образом, чтобы показанные на чертежах расстояния отвечали следующим условиям: (I1.1+I1.2)+I1.3+I1.4+I1.5+I1.6=(I2.1+I2.2)+I2.3+2×I2.4+I2.5+I2.6=I3.1+I3.2+I3.3+I3.4+I3.5+I3.6=I4.1+I4.2+I4.3+I4.4+I4.5+I4.6. При соблюдении указанных соотношений все стороны объекта наблюдаются телецентрическим блоком так, как если бы они находились на одинаковом расстоянии.
Приведенные выше положения позволяют заключить, что для телецентрических блоков 11 и 12 важное для формирования изображений условие эквивалентности расстояний от нижней поверхности 1b, верхней поверхности 1а и боковых поверхностей 1с, 1d объекта до блока 11 достигнуто следующим образом. Для первого направления Р1, отсчитываемого от нижней поверхности 1b объекта, вспомогательные зеркала не применялись вообще, или расстояние между ними или между парами таких зеркал было небольшим. Для второго направления Р2, отсчитываемого от верхней поверхности 1а объекта, выбирались большие расстояния между вспомогательными зеркалами или между парами вспомогательных зеркал. Для третьего и четвертого направлений Р3, Р4, отсчитываемых от боковых поверхностей 1с, 1d объекта, выбирались средние расстояния между вспомогательными зеркалами или между парами вспомогательных зеркал.
В этом контексте следует указать, что изобретение может иметь приложение к обследованию объекта 10 как со всех четырех направлений Р1-Р4 наблюдения, так и с трех или только с двух различных направлений, причем указанные три или два направления наблюдения могут быть любыми из указанных выше четырех направлений. Так, при желании можно обследовать только верхнюю поверхность 1а и нижнюю поверхность 1b объекта. Выбор поверхности, предназначенной для обследования, конечно, зависит от типа объекта и цели его применения. Естественно, этот вопрос решает пользователь на основании имеющейся у него информации, причем заранее. Устройство по изобретению можно спроектировать и сконструировать так, чтобы оно было способно обследовать все четыре доступных направления наблюдения, даже если некоторые из них обследоваться не будут. В других случаях устройство по изобретению можно спроектировать и сконструировать так, чтобы оно содержало средства для использования только двух или трех направлений (Р1, и/или Р2, и/или Р3, и/или Р4) наблюдения. Тогда конструкция устройства упростится за счет удаления вспомогательных зеркал или пар таких зеркал, используемых на исключенном направлении или исключенных направлениях.
Приемная плоскость 23, сформированная светочувствительными пикселями съемочного аппарата 21, имеет размеры, достаточные для приема, по меньшей мере, двух отдельных изображений I1, и/или I2, и/или I3, и/или I4. Каждое указанное изображение соответствует одному из направлений Р1, Р2, Р3, Р4 наблюдения, выбранных для обследования объекта. Другими словами, согласно изобретению изображение объекта создается на приемной плоскости 23, т.е. в плоскости изображения съемочного аппарата или нескольких таких аппаратов одновременно по всем указанным использованным направлениям. Для этого приемная плоскость 23 изображения имеет размеры, достаточные для приема четырех отдельных изображений, каждое из которых соответствует одному из направлений Р1, Р2, Р3, Р4 наблюдения. Указанная плоскость может быть вытянута по одной координате (длине); такой съемочный аппарат называется линейным. В этой схеме отдельные изображения I1, и/или I2, и/или I3, и/или I4 с помощью вспомогательных зеркал и/или пар таких зеркал размещаются в пространстве по одной линии, как это показано на фиг.10. Возможен вариант, в котором приемная плоскость 23 имеет две координаты, ориентированные в двух взаимно перпендикулярных направлениях (т.е. длину и ширину); посредством такого съемочного аппарата получают двумерное изображение поверхности. В этой схеме отдельные изображения I1, и/или I2, и/или I3, и/или I4 с помощью вспомогательных зеркал и/или пар таких зеркал размещаются в пространстве, или строго стыкуясь друг с другом, или с некоторым перекрыванием, как это показано на фиг.11.
Кроме того, устройство по изобретению может содержать второй телецентрический блок 12, также формирующий изображение. Указанный блок имеет нетелецентрический съемочный аппарат 21, состоящий из объектива 22 и приемной плоскости 23, которая сформирована светочувствительными пикселями, а также вогнутое зеркало 24 в форме параболического цилиндра, имеющее в своей фокальной плоскости апертурную диафрагму 25 объектива. Таким образом, второй блок 12, формирующий изображение, относится к тому же типу, что и первый блок 11. Каждый из указанных блоков принимает лучи, образующие изображение, по меньшей мере, с двух направлений Р1, и/или Р2, и/или Р3, и/или Р4 наблюдения в соответствии с принципами, разъясненными выше.
Фиг.9 иллюстрирует такой вариант, использующий два указанных телецентрических блока 11, 12. В отношении системы вспомогательных зеркал 8 варианты осуществления, представленные на фиг.8 и 9, по своему типу одинаковы, за исключением того, что во втором случае лучи, формирующие изображения нижней поверхности и одной боковой поверхностей объекта, отражаются к первому блоку 11, в то время как лучи, формирующие изображения верхней поверхности и второй боковой поверхностей объекта, отражаются ко второму блоку 12. Однако в этом варианте разности расстояний до изображения, вызванные наличием уголкового зеркала, как это было разъяснено выше, нужно компенсировать только в пределах одного телецентрического блока. Другими словами, в указанной компенсации нуждаются только два расстояния до изображения, а именно m1 и m3, тогда как другие (m2 и m4) требуют компенсации только относительно друг друга.
Относительно данного варианта осуществления изобретения следует также иметь в виду, что в этом случае телецентрические блоки 11 и 12, формирующие изображение, ориентированы по направлению к комбинации объекта и уголкового зеркала не непосредственно, а за счет отражения от вспомогательных зеркал 8а, 8d, 8с и 8е, находящихся в наклонном положении. Положения биссектрисы 14 уголкового зеркала 13 и оптических осей 9 телецентрических блоков 11 и 12 (точнее - их продолжений, с учетом отражений света от соответствующих зеркал) взаимно согласованы. Действительно, указанные блоки развернуты на некоторый угол, но вспомогательные зеркала поворачивают все элементы изображения точно на такой же угол.









Изобретение относится к устройству, предназначенному для оптического обследования открытых поверхностей объектов, по меньшей мере, с двух различных направлений (P1, P2) наблюдения. Устройство содержит телецентрический блок, формирующий изображение, уголковое зеркало и вспомогательные зеркала в зоне (К) указанного блока между ним и объектом. Объект помещают между гранями уголкового зеркала, а телецентрический блок ориентирован по направлению к комбинации объекта и уголкового зеркала. Вспомогательные зеркала ориентированы таким образом и размещены на таких расстояниях от телецентрического блока, чтобы разности расстояний до изображения для направлений (Р1, и/или P2, и/или Р3, и/или Р4) при прохождении с отражением от двух граней или одной грани уголкового зеркала, или минуя указанные грани, компенсировались отражением от вспомогательных зеркал. Технический результат - возможность обследования поверхности во всех его поперечных направлениях посредством оптических средств, а также с использованием изображения в анализе всех видов дефектов и свойств объекта. 13 з.п. ф-лы, 11 ил.
1. Устройство для оптического обследования открытых поверхностей (1) объектов (10), по меньшей мере, с двух различных направлений (P1, P2) наблюдения, содержащее
осветительные блоки (20) для освещения открытых поверхностей объектов,
сенсорный блок (30) для детектирования интенсивности излучения, отраженного различными участками открытых поверхностей объектов, и преобразования его в электронную форму,
отличающееся тем, что
сенсорный блок (30) устройства содержит, по меньшей мере, первый телецентрический блок (11), формирующий изображение и имеющий оптическую ось (9),
устройство дополнительно содержит уголковое зеркало (13) и вспомогательные зеркала (8), расположенные в отображаемой зоне (К) телецентрического блока, формирующего изображение, между указанным блоком и объектом,
объект (10) расположен между гранями (3а, 3b) уголкового зеркала (13), а телецентрический блок, формирующий изображение, обращен в сторону комбинации объекта и уголкового зеркала, при этом вспомогательные зеркала (8) ориентированы таким образом и размещены на таких расстояниях от телецентрического блока, формирующего изображение, что разности расстояний до изображения для направлений (P1, и/или Р2, и/или Р3, и/или Р4) наблюдения при прохождении излучения с отражением от двух граней (3а и 3b) уголкового зеркала, с отражением от одной из указанных граней (3а или 3b) или минуя указанные грани, компенсируются за счет отражений от вспомогательных зеркал.
2. Устройство по п.1, отличающееся тем, что осветительные блоки представляют собой источники рассеянного излучения или источники направленного излучения, которые излучают некогерентное излучение.
3. Устройство по п.1, отличающееся тем, что положения биссектрисы (14) уголкового зеркала (13) и оптической оси (9) или их продолжений параллельны или биссектриса (14) уголкового зеркала (13) и оптическая ось (9) совпадают одна с другой.
4. Устройство по п.1, отличающееся тем, что первый телецентрический блок (11), формирующий изображение, содержит
нетелецентрический съемочный аппарат (21), имеющий объектив (22) и приемную плоскость (23), сформированную светочувствительными пикселями, и
вогнутое планарное параболическое зеркало (24) с расположенной в его фокальной плоскости (F) апертурной диафрагмой (25) объектива.
5. Устройство по п.4, отличающееся тем, что вогнутое планарное параболическое зеркало (24) обращено к объективу (22) и не обращено к комбинации объекта и уголкового зеркала, а устройство содержит вспомогательные зеркала (8), количество которых, по меньшей мере, равно количеству желаемых направлений (Р1, и/или Р2, и/или Р3, и/или Р4) наблюдения объекта, причем на каждом направлении наблюдения расположено, по меньшей мере, одно вспомогательное зеркало (8g, 8с, 8а, 8е), обеспечивающее отражение информации от объекта (10) к телецентрическому блоку, формирующему изображение.
6. Устройство по п.4, отличающееся тем, что вогнутое планарное параболическое зеркало (24) обращено к объективу (22) и к комбинации объекта и уголкового зеркала, при этом устройство содержит, по меньшей мере, одну из пар вспомогательных зеркал (8а и 8b, 8с и 8d, 8e и 8f), расположенную на каждом из тех желаемых направлений (Р2, и/или Р3, и/или Р4) наблюдения, которые короче, чем направление (Р1, и/или Р3, и/или Р4) наблюдения, имеющее максимальное расстояние до изображения, а каждая пара вспомогательных зеркал расположена таким образом, чтобы отражать информацию от объекта (10) к телецентрическому блоку, формирующему изображение.
7. Устройство по п.4, отличающееся тем, что вогнутое планарное параболическое зеркало (24) обращено в том же направлении, что и объектив (22), и в сторону комбинации объекта и уголкового зеркала, при этом устройство содержит общее для всех направлений наблюдения вспомогательное зеркало, расположенное между вогнутым планарным параболическим зеркалом и объективом и служащее для отражения информации от вогнутого планарного параболического зеркала к съемочному аппарату (21), и, по меньшей мере, одну из пар вспомогательных зеркал (8а и 8b, 8e и 8f, 8d и 8с), расположенную на каждом из тех желаемых направлений (Р2, и/или Р3, и/или Р4) наблюдения, которое короче, чем направление (Р1, и/или Р3, и/или Р4) наблюдения, имеющее максимальное расстояние до изображения, а каждая пара вспомогательных зеркал расположена с возможностью отражения информации от объекта (10) к телецентрическому блоку, формирующему изображение.
8. Устройство по п.5, отличающееся тем, что дополнительно содержит, по меньшей мере, одну дополнительную пару вспомогательных зеркал (8h, 8i), чтобы увеличить расстояние до изображения, соответствующее одному или нескольким направлениям (Р1, и/или Р2, и/или Р3, и/или Р4) наблюдения, посредством отражения излучения между указанными вспомогательными зеркалами, при этом дополнительная пара (дополнительные пары) вспомогательных зеркал помещена (помещены)
между указанными вспомогательными зеркалами и лучами, идущими от объекта и несущими информацию, или
между вспомогательными зеркалами и телецентрическим блоком, формирующим изображение, или
между вспомогательными зеркалами пар вспомогательных зеркал, или
между парами вспомогательных зеркал и лучами, идущими от объекта и несущими информацию, или
между парами вспомогательных зеркал и телецентрическим блоком, формирующим изображение.
9. Устройство по п.5, отличающееся тем, что вогнутое планарное параболическое зеркало (24) и вспомогательные зеркала (8a-8i) представляют собой зеркала в виде полоски с отражающей поверхностью, расположенной поперечно относительно оптической оси, при этом все вспомогательные зеркала смещены на различные расстояния в направлении, поперечном относительно оптической оси так, что все направления (Р1-Р4) наблюдения, ведущие к нижней поверхности, верхней поверхности и к боковым поверхностям объекта доступны одновременно без взаимного затенения между вспомогательными зеркалами.
10. Устройство по п.5, отличающееся тем, что расстояния до изображения от нижней поверхности (1b), от верхней поверхности (1а) и от боковых поверхностей (1с, 1d) до телецентрического блока (11), формирующего изображение, выбраны одинаковыми, причем они отсчитываются
для первого направления (P1) - от нижней поверхности объекта при отсутствии вспомогательных зеркал или при небольших расстояниях между вспомогательными зеркалами или парами вспомогательных зеркал,
для второго направления (Р2) - от верхней поверхности объекта при больших расстояниях между вспомогательными зеркалами или парами вспомогательных зеркал,
для третьего и четвертого направлений (Р3, Р4) - от боковых поверхностей объекта при средних расстояниях между вспомогательными зеркалами или парами вспомогательных зеркал.
11. Устройство по п.1, отличающееся тем, что объект (10) расположен в зоне, заданной биссектрисой (14) и одной гранью (3а или 3b) уголкового зеркала.
12. Устройство по любому из предыдущих пунктов, отличающееся тем, что угол между гранями уголкового зеркала составляет 90°.
13. Устройство по п.4, отличающееся тем, что приемная плоскость (23), сформированная светочувствительными пикселями съемочного аппарата (21), имеет длину и/или ширину, достаточные для приема, по меньшей мере, двух отдельных изображений (11, и/или 12, и/или 13, и/или 14), каждое из которых соответствует одному из направлений (P1, P2, Р3, Р4) наблюдения.
14. Устройство по п.1, отличающееся тем, что оно дополнительно содержит второй телецентрический блок (12), формирующий изображение и содержащий
нетелецентрический съемочный аппарат (21), имеющий объектив (22) и приемную плоскость (23), сформированную светочувствительными пикселями, и
вогнутое планарное параболическое зеркало (24) с расположенной в его фокальной плоскости (F) апертурной диафрагмой (25) объектива,
причем первый и второй телецентрические блоки, формирующие изображение, выполнены с возможностью приема изображения, по меньшей мере, с двух направлений (Р1, и/или P2, и/или Р3, и/или Р4) наблюдения.
| US 2003174318 A1, 18.09.2003 | |||
| Способ получения лакойля "Баку-1 | 1982 |
|
SU1089106A1 |
| УСТРОЙСТВО для РАЗБРАКОВКИ| | 0 |
|
SU189204A1 |
| JP 10221036 A, 21.08.1998 | |||
| СПОСОБ ПОЛУЧЕНИЯ ГИПОАЛЛЕРГЕННОГО ЛИШАЙНИКОВОГО МАСЛА | 1991 |
|
RU2092168C1 |
| US 6141040 A, 31.10.2000. | |||

