Предлагаемое изобретение относится к области неразрушающего контроля качества продукции металлургической промышленности с применением электромагнитно-акустических преобразователей и может быть использовано для обнаружения дефектов труб и сортового проката.
Известна установка для бесконтактного ультразвукового контроля сортового проката и труб, в которой с целью защиты электромагнитно-акустических преобразователей (ЭМАП) от повреждений при проходе под ними объекта контроля (ОК) последние снабжены механизмами подъема и опускания на поверхность объекта контроля [1].
Однако полностью исключить повреждения ЭМАП в известном изобретении нельзя, так как на поверхности ОК всегда имеются наружные дефекты, выступающие за пределы поверхности ОК, например отслоения или вкатанная окалина, которые могут в любой момент контроля повредить защитную керамическую пластину, отделяющую катушку индуктивности ЭМАП от ОК.
Известен следящий привод, содержащий измерительный модуль, который установлен на вал, соединенный с механизмом перемещения и являющийся центром и осью качания измерительного модуля [2].
К недостатку известного модуля относится жесткий контакт рабочей поверхности ЭМАП с ОК, большой вес и сложность конструкции.
Известен ЭМАП, в котором корпус концентраторов укреплен на полом цилиндре при помощи двух шарниров и рамки, один шарнир соединяет корпус концентраторов с рамкой, а другой шарнир соединяет рамку с полым цилиндром, корпус в центральной части выполнен в виде цилиндра и снабжен пластиной, к которой прикреплена подложка [3].
Недостатком известного ЭМАП является жесткое соединение корпуса ЭМАП с подложкой, на которую приходятся все ударные нагрузки со стороны ОК при его прохождении под ЭМАП и, как следствие, незащищенность ЭМАП от повреждений.
Задачей заявляемого изобретения является увеличение долговечности ЭМАП.
Это достигается тем, что измерительный модуль, содержащий электромагнитно-акустический преобразователь, подложку, систему рычагов и приводов, дополнительно содержит механизм перемещения электромагнитно-акустического преобразователя, обеспечивающий его постоянное поджатие с выставленным зазором к объекту контроля только за счет магнитного притяжения и не зависящий от механизма перемещения подложки, жестко связанной с модулем, выполненный в виде рамки, прикрепленной к основному приводу модуля системой параллельных, горизонтально расположенных рычагов, к рамке на осях подвешена подложка, к подложке на осях подвешены рычаг отжимной с приводом, соединенные между собой общей осью, на рычаге отжимном закреплен ролик, входящий в контакт с объектом контроля, а на подложке установлена гильза с регулировочным винтом, в которую вставлен электромагнитно-акустический преобразователь.
Описание чертежей
Фиг.1 - измерительный модуль, вид сбоку.
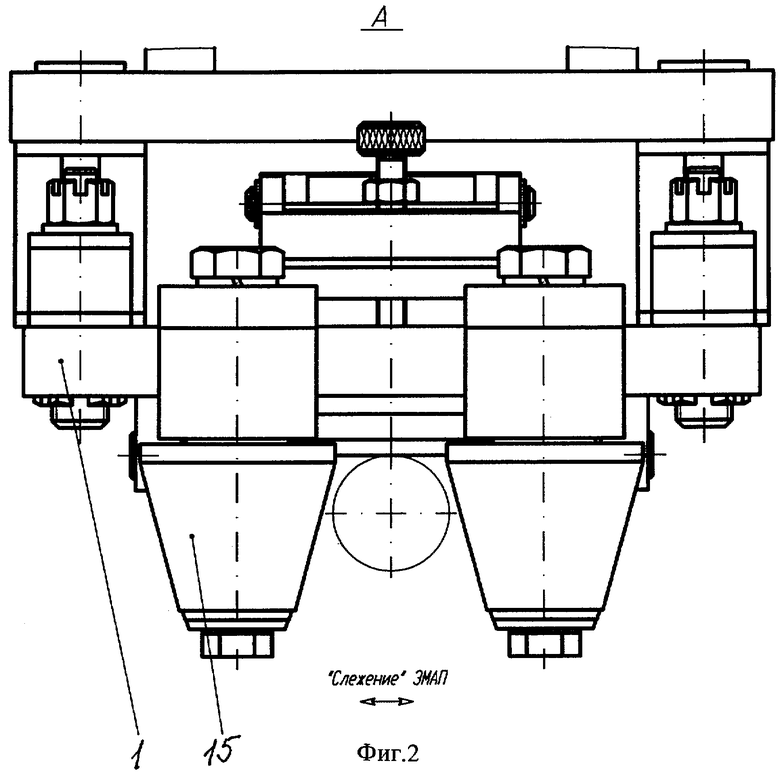
Фиг.2 - вид А, вид спереди.
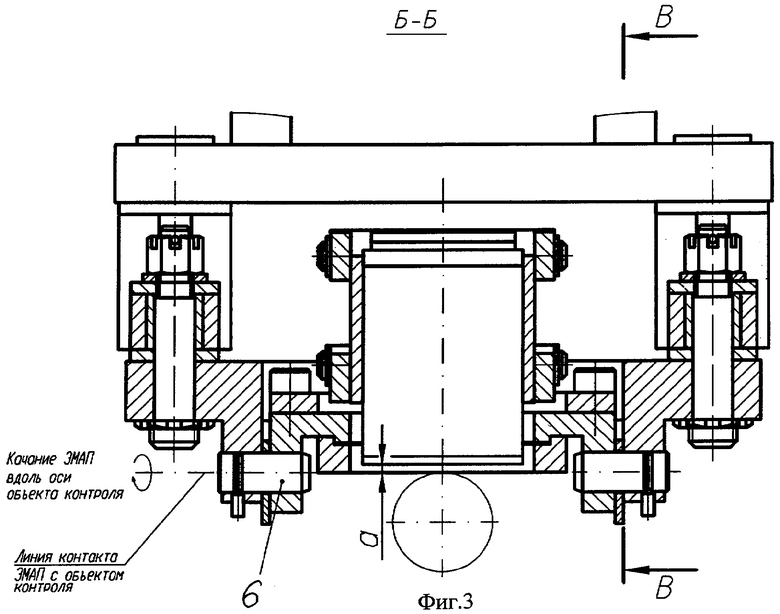
Фиг.3 - разрез Б-Б.
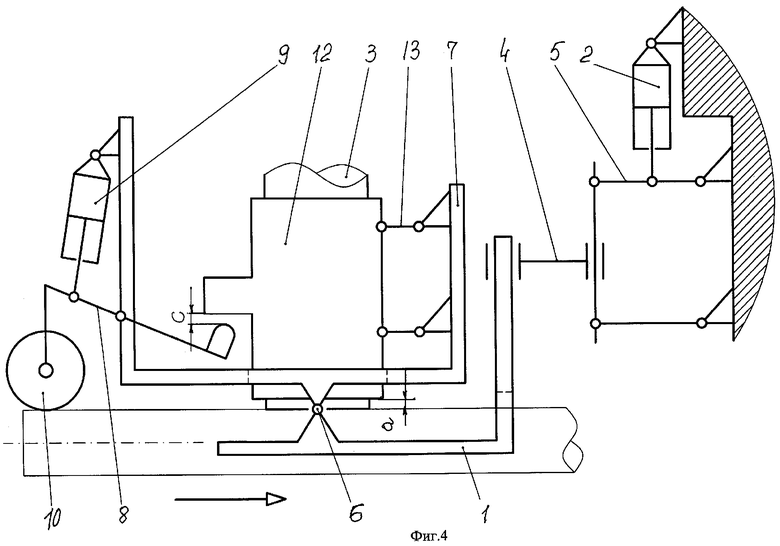
Фиг.4 - кинематическая схема модуля.
Фиг.5 - механизм отжима ЭМАП в момент схода подложки с ОК.
Описание конструкции
Рамка 1 крепится к приводу 2 (например, в виде пневмоцилиндра) ЭМАП 3 параллельными, горизонтально расположенными рычагами 4 и параллельными, вертикально расположенными рычагами 5.
К рамке 1 на осях 6 подвешена положка 7.
К подложке 7 на осях подвешены рычаг отжимной 8 и пневмоцилиндр 9, соединенные между собой общей осью.
На рычаге отжимном 8 закреплен ролик 10.
Подложка 7 имеет вставки 11 из износостойкого материала.
Гильза 12 посредством параллельных вертикальных рычагов 13 закреплена на подложке 7.
В гильзу 12 вкручен винт 14, опирающийся на подложку 7.
ЭМАП 3 вставлен в гильзу 12 и зафиксирован.
К рамке 1 крепятся направляющие конические ролики 15.
Таким образом, в целом конструкция крепления ЭМАП 3 состоит из трех частей:
- параллельных горизонтально расположенных рычагов 4 и параллельных вертикально расположенных рычагов 5;
- условно неподвижной части, состоящей из рамки 1, подложки 7, рычага отжимного 8, роликов 15;
- условно подвижной части, состоящей из ЭМАП 3, гильзы 12, винта 14.
Система горизонтальных рычагов 4 и вертикальных рычагов 5 позволяет совершать рамке 10 в пространстве плоско-параллельное перемещение в вертикальной и горизонтальной плоскостях.
ЭМАП 3 имеет возможность свободного перемещения относительно подложки 7 по нормали к поверхности прутка.
Для изменения зазора «а» ослабляется контргайка 16 и винтом 14 выставляется необходимый зазор.
Величина свободного хода определяется конструкцией гильзы 12. Величина свободного хода должна быть больше максимальной высоты «шишек».
При подводе ЭМАП 3 к прутку (ОК) снизу величина зазора должна обеспечить возможность ЭМАП 3 «подтянуться» силой магнитного притяжения.
Описание работы механизма перемещения ЭМАП
ЭМАП 3 подводится к объекту контроля, например к прутку, и поджимается при помощи пневмоцилиндра 2 (фиг.1-3).
Сила прижима должна обеспечить постоянное поджатие ЭМАП 3 к прутку с выставленным зазором «а» во время статических настроек и при контроле в динамике.
Так как в динамике на ЭМАП 3 действует большая отталкивающая сила Fок, возникающая из-за кривизны прутка, то для компенсации силы Fок необходима сила прижима ЭМАП 3 Fпр=Fок, складывающаяся из двух составляющих:
Fпр=Fц+Fм,
где Fц - сила действия пневмоцилиндра 2 (регулируется давлением воздуха);
Fм - сила магнитного притяжения (зависит от конкретного магнита и незначительно изменяется в зависимости от величины зазора «а», т.к. допустимые изменения зазора «а» крайне малы).
Масса подвижных частей привода ЭМАП 3 достаточно велика и, соответственно, инерционна. Для постоянного поджатая ЭМАП 3 в динамике требуется увеличивать силу действия пневмоцилиндра Fц. На прутке могут появляться местные мелкие неровности («шишки», отслои и т.п.), величиной превышающие зазор «а». При проходе под ЭМАП 3 эти «шишки» создают высокое удельное давление на керамическую пластину ЭМАП 3, разрушая ее и выводя ЭМАП 3 из строя. Это давление зависит от площади контакта «шишки» и ЭМАП 3 и силы прижима ЭМАП 3 Fпр.
При выходе из-под ЭМАП 3 прутка с высокой скоростью, ЭМАП 3 может качнуться на осях 6 и повредить керамическую пластину об «хвост» прутка.
Для уменьшения силы Fпр (соответственно, увеличения долговечности ЭМАП 3 и исключения повреждения) ЭМАП 3 при сходе с прутка ЭМАП 3 выполнен независимым от привода 2 во время контроля. Это обеспечивает поджатие ЭМАП 3 с выставленным зазором к подложке 7 и, соответственно, к прутку только за счет силы магнитного притяжения.
Так как масса и, соответственно, инерционность ЭМАП 3 незначительна по сравнению с силой магнитного притяжения Fм, эта сила гарантированно обеспечит поджатие ЭМАП 3 к подложке 7. При этом удельное давление, оказываемое «шишкой» на керамическую пластину ЭМАП 3 (условно не показана), будет зависеть только от силы Fм, которая значительно меньше силы Fпр.
Ось 6 продольного качания подложки 7 вынесена на линию контакта ЭМАП 3 и прутка для уменьшения опрокидывающей силы и, соответственно, необходимой силы прижима лыжи защитной (фиг.4, 5).
Во время работы пневмоцилиндр 2 привода ЭМАП 3 прижимает посредством рычагов 4 и 5 и рамки 1 подложку 7 к прутку с силой Fпр. ЭМАП 3 отодвинут от прутка на величину зазора «а» и прижимается к подложке 7 силой Fм.
При прохождении под модулем ЭМАП 3 «шишка», воздействуя с силой Fок, отодвигает от прутка подложку 7 вместе с ЭМАП 3. Затем «шишка» выходит из зоны действия подложки 7 и попадает в зону действия ЭМАП 3. Подложка 7 опять прижимается к прутку приводом ЭМАП 3, а сам ЭМАП 3 прижимается к «шишке» с незначительной силой Fм. Далее «шишка» выходит из зоны действия ЭМАП 3 и снова отодвигает от прутка подложку 7 вместе с ЭМАП 3.
Пневмоцилиндр 9 поджимает ролик 10 к прутку. Сила воздействия пневмоцилиндра 9 недостаточна для отжима подложки 7 от прутка, поэтому между рычагом отжимным 8 и рычагом 13 (поддерживающим гильзу 12), остается зазор «с». При сходе ролика 10 с прутка рычаг 8 начинает воздействовать на рычаг 13 и отжимает ЭМАП 3 от подложки 7 и, соответственно, от прутка.
Изобретение позволяет значительно снизить случаи выхода из строя ЭМАП в результате повреждения защитных керамических пластин при сходе ОК из-под ЭМАП, а следовательно, повысить производительность УЗК контроля проката, например, прутков.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ КРУГЛОГО ПРОКАТА | 2006 |
|
RU2325636C1 |
| ПОДВЕСКА ЭЛЕКТРОМАГНИТНО-АКУСТИЧЕСКОГО ПРЕОБРАЗОВАТЕЛЯ | 2008 |
|
RU2390013C1 |
| УСТРОЙСТВО ДЛЯ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ КРУГЛОГО ПРОКАТА | 2006 |
|
RU2313785C1 |
| ЭЛЕКТРОМАГНИТНО-АКУСТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2006 |
|
RU2300763C1 |
| ЭЛЕКТРОМАГНИТНО-АКУСТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2009 |
|
RU2408882C1 |
| УСТРОЙСТВО ДЛЯ СЛЕЖЕНИЯ ЗА СВАРНЫМ ШВОМ | 2007 |
|
RU2343469C2 |
| СПОСОБ ОБНАРУЖЕНИЯ СВАРНОГО ШВА НА ТРУБЕ ПРИ УЛЬТРАЗВУКОВОМ КОНТРОЛЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2343468C2 |
| ЭЛЕКТРОМАГНИТНЫЙ АКУСТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ И СИСТЕМА УЛЬТРАЗВУКОВОГО КОНТРОЛЯ С ТАКИМ ПРЕОБРАЗОВАТЕЛЕМ | 2009 |
|
RU2489713C2 |
| СПОСОБ ДЕФЕКТОМЕТРИИ ПРОКАТНЫХ ЛИСТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2123401C1 |
| ЭЛЕКТРОМАГНИТНО-АКУСТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2005 |
|
RU2295125C1 |

Использование: для неразрушающего контроля качества продукции металлургической промышленности. Сущность: заключается в том, что измерительный модуль, содержащий электромагнитно-акустический преобразователь, подложку, систему рычагов и приводов, дополнительно содержит механизм перемещения электромагнитно-акустического преобразователя, обеспечивающий его постоянное поджатие с выставленным зазором к объекту контроля только за счет магнитного притяжения и не зависящий от механизма перемещения подложки, жестко связанной с модулем, выполненный в виде рамки, прикрепленной к основному приводу модуля системой параллельных, горизонтально расположенных рычагов, к рамке на осях подвешена подложка, к подложке на осях подвешены рычаг отжимной с приводом, соединенные между собой общей осью, на рычаге отжимном закреплен ролик, входящий в контакт с объектом контроля, а на подложке установлена гильза с регулировочным винтом, в которую вставлен электромагнитно-акустический преобразователь. Технический результат: увеличение долговечности электромагнитно-акустического преобразователя. 5 ил.
Измерительный модуль, содержащий электромагнитно-акустический преобразователь, подложку, систему рычагов и приводов, отличающийся тем, что дополнительно содержит механизм перемещения электромагнитно-акустического преобразователя, обеспечивающий его постоянное поджатие с выставленным зазором к объекту контроля только за счет магнитного притяжения и независящий от механизма перемещения подложки, жестко связанной с модулем, выполненный в виде рамки, прикрепленной к основному приводу модуля системой параллельных, горизонтально расположенных рычагов, к рамке на осях подвешена подложка, к подложке на осях подвешены рычаг отжимной с приводом, соединенные между собой общей осью, на рычаге отжимном закреплен ролик, входящий в контакт с объектом контроля, а на подложке установлена гильза с регулировочным винтом, в которую вставлен электромагнитно-акустический преобразователь.
| ЭЛЕКТРОМАГНИТНО-АКУСТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2002 |
|
RU2223487C1 |
| Электромагнитно-акустический преобразователь для контроля тонколистовых материалов | 1976 |
|
SU581427A1 |
| СЛЕДЯЩИЙ ПРИВОД | 2004 |
|
RU2259502C1 |
| US 5741973 A, 21.04.1998 | |||
| US 5689070 A, 18.11.1997 | |||
| US 6109108 A, 29.08.2000 | |||
| ЕР 0451375 А2, 16.10.1991. | |||

