Предлагаемое изобретение относится к области неразрушающего контроля качества продукции металлургической промышленности с применением ультразвуковых преобразователей (электромагнитно-акустических, пьезоэлектрических и др.) и может быть использовано для обнаружения дефектов на круглом сортовом прокате.
Известна установка для бесконтактного ультразвукового контроля сортового проката и труб, в которой с целью защиты электромагнитно-акустических преобразователей (ЭМАП) от повреждений при проходе под ними объекта контроля (ОК), последние снабжены механизмами подъема и опускания на поверхность объекта контроля [1].
Однако полностью исключить повреждения ЭМАП в известном изобретении нельзя, так как на поверхности ОК всегда имеются наружные дефекты, выступающие за пределы поверхности ОК, например отслоения или вкатанная окалина, которые могут в любой момент контроля повредить защитную керамическую пластину, отделяющую катушку индуктивности ЭМАП от ОК.
Известен следящий привод, содержащий измерительный модуль, который установлен на вал, соединенный с механизмом перемещения и являющийся центром и осью качания измерительного модуля [2]. К недостатку известного модуля относится жесткий контакт рабочей поверхности ЭМАП с ОК, большой вес и сложность конструкции.
Известен ЭМАП, в котором корпус концентраторов укреплен на полом цилиндре при помощи двух шарниров и рамки, один шарнир соединяет корпус концентраторов с рамкой, а другой шарнир соединяет рамку с полым цилиндром, корпус в центральной части выполнен в виде цилиндра и снабжен пластиной, к которой прикреплена подложка [3]. Недостатком известного ЭМАП является жесткое соединение корпуса ЭМАП с подложкой, на которую приходятся все ударные нагрузки со стороны ОК при его прохождении под ЭМАП и, как следствие, незащищенность ЭМАП от повреждений.
Задачей изобретения является более качественный УЗК круглого проката и увеличение долговечности ЭМАП.
Указанная цель достигается тем, что в устройстве для ультразвукового контроля круглого проката, содержащем ультразвуковой преобразователь, опоры, подложку и систему регулирования положения ультразвукового преобразователя относительно поверхности объекта контроля, система регулирования состоит из механизма подвода и прижима подложки к объекту контроля и механизма центрирования и независимого прижима ультразвукового преобразователя к объекту контроля, механизм подвода и прижима подложки к объекту контроля содержит корпус, на котором смонтированы направляющие, соединенные траверсой с пневмоцилиндром и снабженные цапфами для соединения с механизмом центрирования и независимого прижима ультразвукового преобразователя к объекту контроля, механизм центрирования и независимого прижима ультразвукового преобразователя к объекту контроля содержит подложку, которая жестко связана с механизмом подвода и прижима подложки к объекту контроля при помощи рамки, соединенной с направляющими механизма подвода и прижима подложки при помощи осей, обеспечивающих качание подложки в плоскостях поперечного и продольного сечений объекта контроля, например прутка, при его отклонении от оси симметрии устройства, на подложке установлена планка с ультразвуковым преобразователем, на которой смонтированы опоры скольжения, например, линейные подшипники для обеспечения ее вертикального перемещения относительно подложки при проходе дефектов, выступающих над поверхностью объекта контроля, корпуса линейных подшипников жестко закреплены на подложке, а штоки линейных подшипников жестко соединены с планкой, ультразвуковой преобразователь установлен по центру планки, которая прижата к подложке, например, только силой пружин, в случае использования пьезоэлектрического преобразователя, или силой магнитного поля, в случае использования электромагнитно-акустического преобразователя, планка снабжена накладкой из твердого сплава, предназначенной для защиты ультразвукового преобразователя от износа при трении о поверхность объекта контроля и имеет скосы в поперечном сечении для надежной «посадки» ультразвукового преобразователя на поверхность объекта контроля.
Кроме того, при использовании пьезоэлектрического преобразователя, на подложке установлен коллектор для подачи в зону контроля воды по трубкам и специальным каналам, выполненным в подложке.
Описание чертежей
На фиг.1 показан продольный разрез устройства для УЗК круглого проката, например прутка;
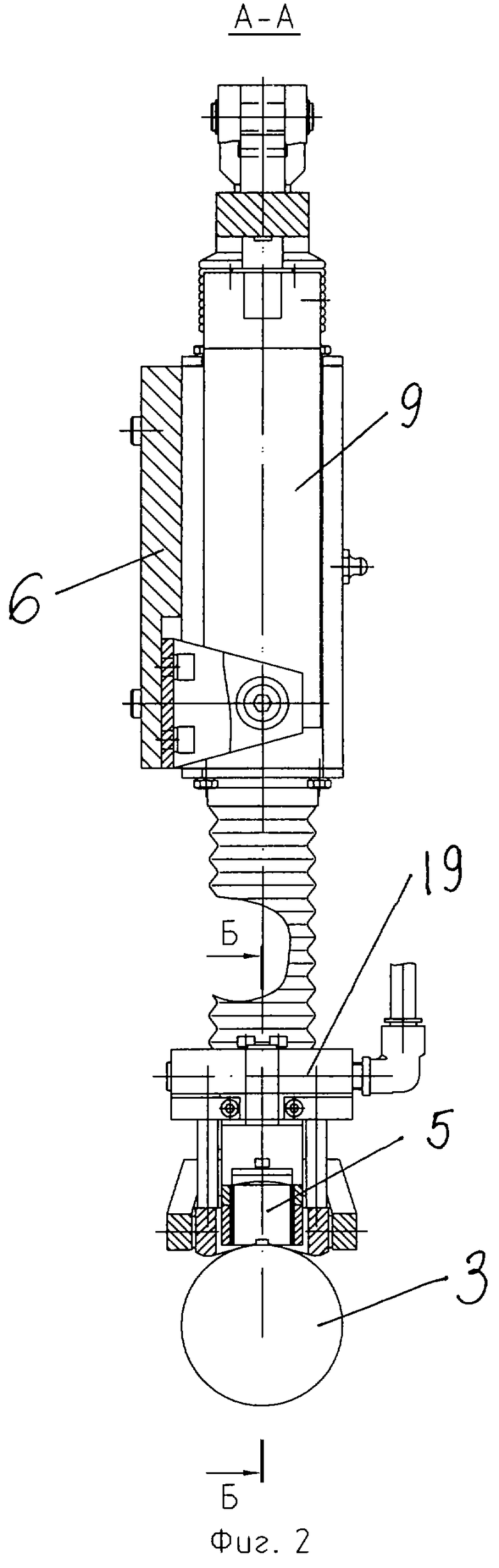
на фиг.2 показан разрез А-А, вид сбоку;
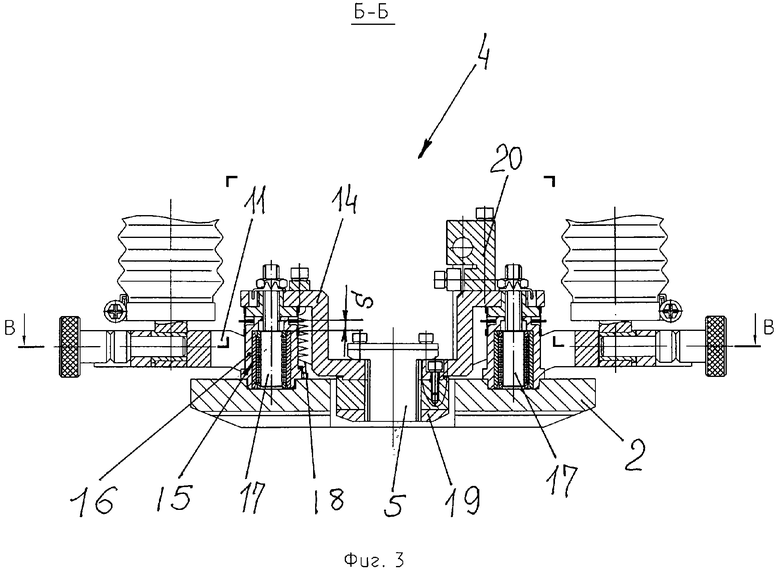
на физ.3 показан продольный разрез Б-Б (фиг.2) механизма центрирования и независимого прижима ультразвукового преобразователя к объекту контроля;
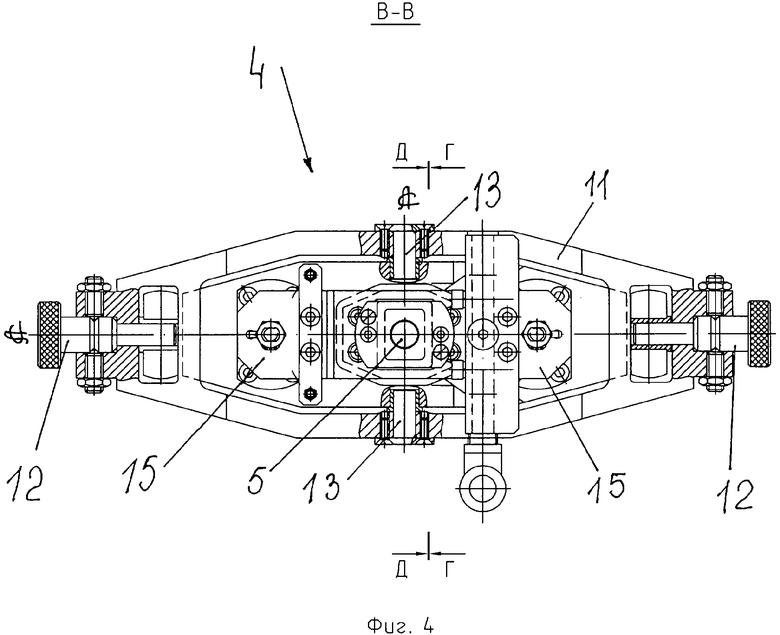
на фиг.4 показан разрез В-В (фиг.3), вид сверху на механизм центрирования и независимого прижима ультразвукового преобразователя к объекту контроля;
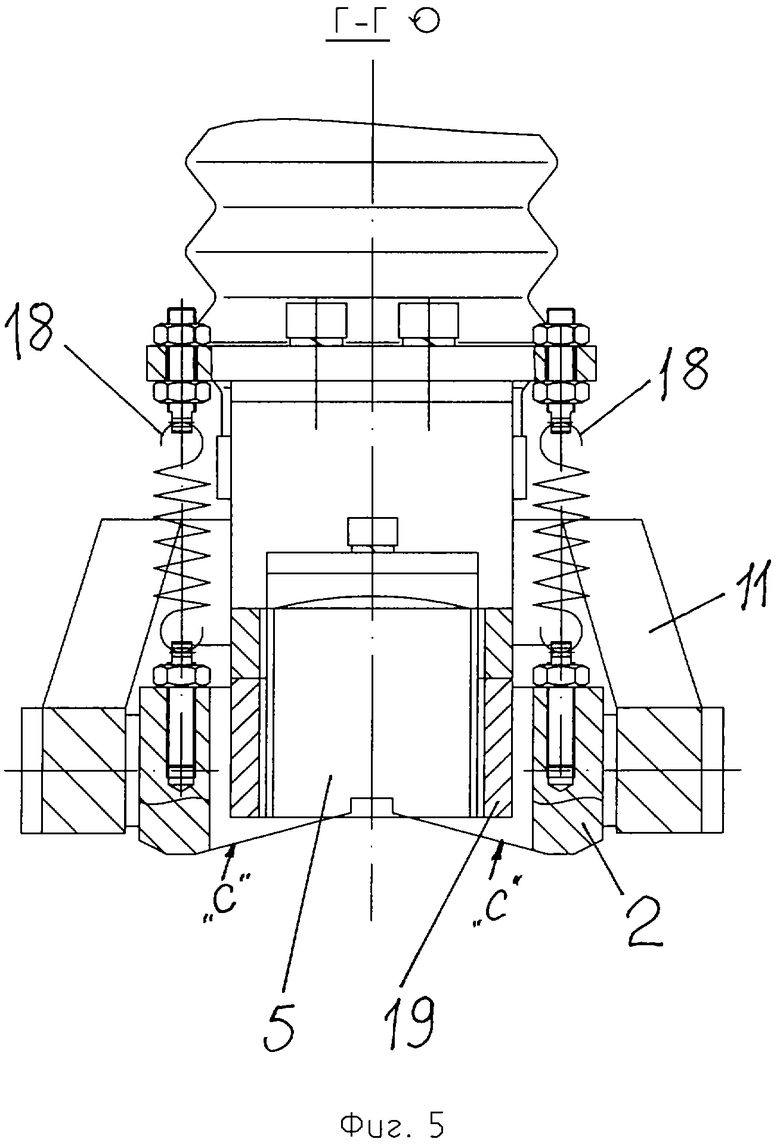
на фиг.5 показан поперечный разрез Г-Г (фиг.4) механизма центрирования и независимого прижима ультразвукового преобразователя к объекту контроля с видом на ЭМАП, накладку и линейный подшипник;
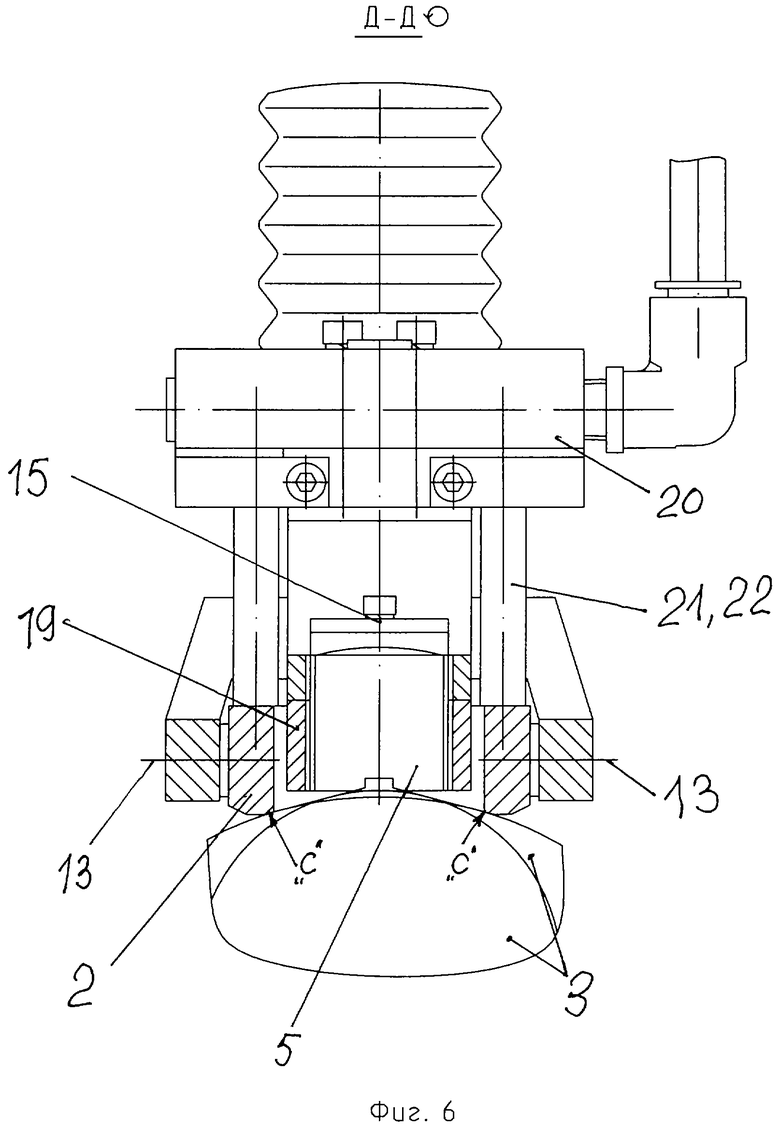
на фиг.6 показан поперечный разрез Д-Д (фиг.4) механизма центрирования и независимого прижима ультразвукового преобразователя к объекту контроля с видом на коллектор для подачи воды в зону работы пьезоэлектрического преобразователя (ПЭП), накладку и линейный подшипник.
Описание конструкции устройства для ультразвукового контроля круглого проката с системой регулирования, состоящей из механизма подвода и прижима подложки к объекту контроля и механизма центрирования и независимого прижима ультразвукового преобразователя к объекту контроля.
Устройство для ультразвукового контроля круглого проката состоит из механизма 1 подвода и прижима подложки 2 к объекту контроля 3 и механизма 4 центрирования и независимого прижима ультразвукового преобразователя 5 к объекту контроля 3.
Механизм 1 подвода и прижима подложки 2 к объекту контроля 3 содержит корпус 6, на котором смонтированы направляющие 7, соединенные траверсой 8 с пневмоцилиндром 9 и снабженные цапфами 10 для соединения с механизмом 4 центрирования и независимого прижима ультразвукового преобразователя 5 к объекту контроля 3.
Механизм 4 центрирования и независимого прижима ультразвукового преобразователя к объекту контроля 3 содержит подложку 2, которая жестко связана с механизмом 1 подвода и прижима подложки 2 к объекту контроля 3 при помощи рамки 11, соединенной с направляющими 7 механизма 1 подвода и прижима подложки при помощи осей 12 и 13, обеспечивающих качание подложки 2 в плоскостях поперечного и продольного сечений объекта контроля 3, например прутка, при его отклонении от оси симметрии устройства.
На подложке 2 установлена планка 14 с ультразвуковым преобразователем 5, на которой смонтированы опоры скольжения, например, линейные подшипники 15 для обеспечения ее вертикального перемещения относительно подложки 2 при проходе дефектов, выступающих над поверхностью объекта контроля 3.
Корпуса 16 линейных подшипников 15 жестко закреплены на подложке 2, а штоки 17 линейных подшипников 15 жестко соединены с планкой 14.
Ультразвуковой преобразователь 5 установлен по центру планки 14, которая дополнительно прижата к подложке 2 при помощи пружин 18, снабжена накладкой 19 из твердого сплава, предназначенной для защиты ультразвукового преобразователя 5 от износа при трении о поверхность объекта контроля 3 и имеет скосы «С» в поперечном сечении для надежной «посадки» ультразвукового преобразователя 5 на поверхность объекта контроля 3.
Кроме того, при использовании пьезоэлектрического преобразователя 5 на подложке 2 установлен коллектор 20 для подачи в зону контроля воды по трубкам 21 и специальным каналам 22, выполненным в подложке 2.
Принцип работы устройства
На фиг.1-6 показано предлагаемое устройство.
Устройство жестко крепится через корпус 6 к металлоконструкции установки УЗК проката (условно не показана).
Подвод и прижим подложки 2 с ЭМАП 5 на поверхность ОК, например круглого прутка, осуществляется при помощи механизма 1 подвода и прижима подложки 2 к объекту контроля 3.
При движении прутка перемещение ЭМАП происходит независимо от перемещения подложки 2 при помощи механизма 4 центрирования и автономного прижима ультразвукового преобразователя 5 к объекту контроля 3 за счет того, что механизм 4 установлен на подложке 2 на линейных подшипниках 15, а прижим ЭМАП к подложке 2 осуществляется или только магнитным полем в случае использования электромагнитно-акустического пробразователя 5 или пружинами 18 в случае использования пьезоэлектрического преобразователя 5.
Если на пути ЭМАП 5 встретится препятствие, например наружный дефект в виде нароста окалины или отслоения, то подложка 2 и ЭМАП 5 пройдут над препятствием независимо друг от друга.
То есть на ЭМАП 5 (или ПЭП) будет действовать только сила притяжения ЭМАП 5 к прутку (плюс вес ЭМАП 5) или только сила сжатия пружин 18, а не вес всего устройства, так как за счет линейных подшипников 15 под действием удара ЭМАП 5 (за счет хода штоков 17 или деформации S пружин 18) поднимется вверх.
После прохода над дефектом ЭМАП 5 (или ПЭП) снова прижмется к поверхности ОК силой магнитного поля или силой сжатия пружин 18.
При этом на ЭМАП (или ПЭП) будет действовать значительно меньшая сила, которая не приведет к его разрушению.
Предлагаемая конструкция позволяет проводить более качественный УЗ-контроль прутков и увеличить срок службы ЭМАП (или ПЭП).
Источники информации
1. Патент РФ №2238553.
2. Патент РФ №2259502.
3. Патент РФ №2247979.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ КРУГЛОГО ПРОКАТА | 2006 |
|
RU2325636C1 |
| ПОДВЕСКА ЭЛЕКТРОМАГНИТНО-АКУСТИЧЕСКОГО ПРЕОБРАЗОВАТЕЛЯ | 2008 |
|
RU2390013C1 |
| Устройство для неразрушающего контроля металлопроката | 2021 |
|
RU2762521C1 |
| ИЗМЕРИТЕЛЬНЫЙ МОДУЛЬ | 2006 |
|
RU2315294C1 |
| СПОСОБ ДИАГНОСТИКИ НЕСПЛОШНОСТЕЙ ПОВЕРХНОСТИ СЛОЯ МЕТАЛЛОПРОКАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2262689C1 |
| ЭЛЕКТРОМАГНИТНО-АКУСТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2006 |
|
RU2300763C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ДЕФЕКТОВ НА ПОВЕРХНОСТИ ФЕРРОМАГНИТНЫХ МАТЕРИАЛОВ И ИЗДЕЛИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2561250C2 |
| ЭЛЕКТРОМАГНИТНО-АКУСТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2004 |
|
RU2271876C1 |
| СПОСОБ ОБНАРУЖЕНИЯ СВАРНОГО ШВА НА ТРУБЕ ПРИ УЛЬТРАЗВУКОВОМ КОНТРОЛЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2343468C2 |
| УСТРОЙСТВО ДЛЯ СЛЕЖЕНИЯ ЗА СВАРНЫМ ШВОМ | 2007 |
|
RU2343469C2 |
Использование: для ультразвукового контроля круглого проката. Сущность: заключается в том, что система регулирования состоит из механизма подвода и прижима подложки к объекту контроля и механизма центрирования и независимого прижима ультразвукового преобразователя к объекту контроля, механизм подвода и прижима подложки к объекту контроля содержит корпус, на котором смонтированы направляющие, соединенные траверсой с пневмоцилиндром и снабженные цапфами для соединения с механизмом центрирования и независимого прижима ультразвукового преобразователя к объекту контроля, механизм центрирования и независимого прижима ультразвукового преобразователя к объекту контроля содержит подложку, которая жестко связана с механизмом подвода и прижима подложки к объекту контроля при помощи рамки, соединенной с направляющими механизма подвода и прижима подложки при помощи осей, обеспечивающих качание подложки в плоскостях поперечного и продольного сечений объекта контроля, на подложке установлена планка с ультразвуковым преобразователем, на которой смонтированы опоры скольжения, например, линейные подшипники для обеспечения ее вертикального перемещения относительно подложки при проходе дефектов, выступающих над поверхностью объекта контроля, корпуса линейных подшипников жестко закреплены на подложке, а штоки линейных подшипников жестко соединены с планкой, ультразвуковой преобразователь установлен по центру планки, которая прижата к подложке. Технический результат: повышение качества контроля круглого проката и увеличение долговечности. 1 з.п. ф-лы, 6 ил.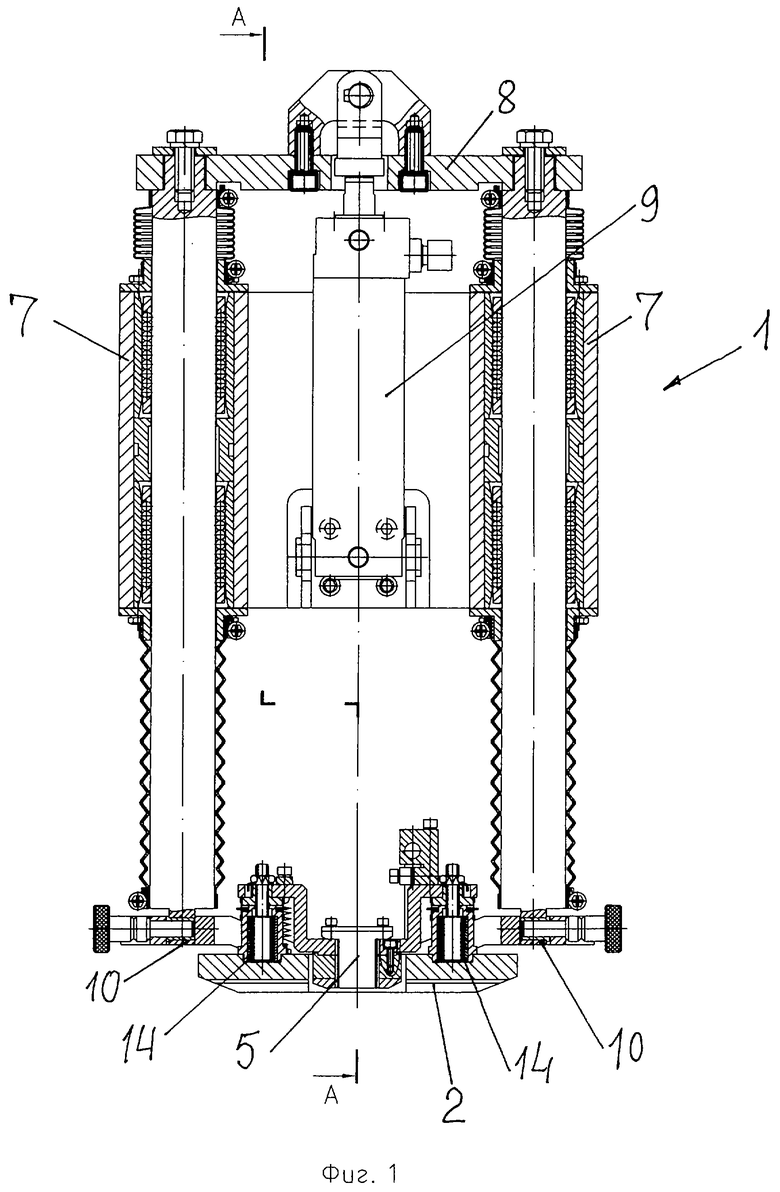
| ЭЛЕКТРОМАГНИТНО-АКУСТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2002 |
|
RU2223487C1 |
| Электромагнитно-акустический преобразователь для контроля тонколистовых материалов | 1976 |
|
SU581427A1 |
| СЛЕДЯЩИЙ ПРИВОД | 2004 |
|
RU2259502C1 |
| ЭЛЕКТРОМАГНИТНО-АКУСТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2003 |
|
RU2247978C1 |
| US 5741973 A, 21.04.1998 | |||
| US 5689070 A, 18.11.1997 | |||
| US 6109108 A, 29.08.2000. | |||

