Система относится к области железнодорожной автоматики и телемеханики и может быть использована в устройствах автоматического управления движением поездов на станциях.
Известны системы управления подвижными железнодорожными объектами, содержащие на пути и на подвижной единице рельсового транспорта лазерные датчики для определения ее местоположения (DE 102006007788 B61L 27/00, B60W 30/10, опубл. 30.08.07). Данные системы не используются для маневровой работы, в частности, по формированию пассажирских составов.
Известна система автоматического управления торможением - САУТ (Никифоров Б.Д., Головин В.И., Кутыев Ю.Г. "Автоматизация управления тормозами поездов". М., Транспорт, 1985, с.263), которая обеспечивает прицельную остановку перед препятствием, но не позволяет совершать маневровую работу на станции.
Известна система маневровой автоматической локомотивной сигнализации (Кочнев А.В. "Маневровая автоматическая локомотивная сигнализация", журнал "Автоматика, связь и информатика", №4, 2000, с.43-47), в которой для повышения информационной обеспеченности на путях станций предусмотрен цифровой радиоканал связи между машинистом поезда и диспетчером. Недостатком известной системы является сложность аппаратуры, что приводит к ее удорожанию и затрудняет форсированное оснащение этой аппаратурой железнодорожного транспорта.
Наиболее близкой по своей технической сущности к заявляемому изобретению является система автоматического управления движением поездов на перегонах и станциях (Леонов А.А. "Техническое обслуживание автоматической локомотивной сигнализации". М., Транспорт, 1982, с.256), содержащая на локомотиве блок автоматической локомотивной сигнализации, выход которого соединен с первым входом управления блоком торможения, и бортовой блок приемопередатчика типовой поездной радиосвязи, связанный по аналоговому каналу радиосвязи с блоком приемопередатчика типовой поездной радиосвязи руководителя маневров. Управление маневровыми передвижениями осуществляется посредством передачи приказов от руководителя маневров машинисту и подтверждения машинистом руководителю маневров о выполнении приказов через типовые устройства поездной радиосвязи. При этом машинист периодически подтверждает бдительность для предотвращения срабатывания автостопа при каждой смене сигнального показания на локомотивном светофоре. Недостатком известной системы с точки зрения применения при маневровой работе является то, что интервал проверки бдительности 20-30 секунд слишком велик для маневровой работы, а автостоп системы экстренно срабатывает только при превышении скорости 20 км/час, в то время как при маневрах по формированию состава допускается соударение вагонов на скорости не более 3 км/час (см. пункты 15.16, 15.23 и 15.24 Правил технической эксплуатации железных дорог Российской Федерации, утвержденных МПС России 26 мая 2000 г. ЦРБ-756 и пункт 11.20 Инструкции по движению поездов и маневровой работе на железнодорожном транспорте Российской Федерации, утвержденной МПС России 16 октября 2000 г. ЦЦ-790).
Из-за запоздалого восприятия машинистами информации от руководителей маневров, особенно в зонах неуверенного приема средств радиосвязи (прежде всего вблизи виадуков, путепроводов, высоковольтных линий электропередач и других сооружений, влияющих на работу радиосвязи), имеются аварийные случаи. Например, имелись случаи повреждения вагонов из-за наезда на тупиковую призму перронного пути при осаживании вагонами вперед пассажирского состава под посадку и превышении допустимой скорости движения.
Технический результат изобретения заключается в расширении функциональных возможностей и повышении точности управления.
Технический результат достигается тем, что в системе управления маневровыми передвижениями, содержащей на локомотиве блок автоматической локомотивной сигнализации, выход которого соединен с первым входом управления блоком автостопного торможения, и бортовой блок приемопередатчика поездной радиосвязи, связанный по аналоговому каналу радиосвязи с блоком приемопередатчика поездной радиосвязи руководителя маневров, согласно изобретению на локомотиве введен блок бортового приемопередатчика цифрового канала радиосвязи, который своим портом через блок сопряжения соединен со вторым входом управления блоком автостопного торможения, а на оси пути приема состава позади тупиковой призмы размещен блок лазерного измерителя скорости и дальности, своим портом последовательного интерфейса соединенный с первым портом последовательного интерфейса микропроцессора, второй порт которого соединен с блоком стационарного приемопередатчика цифрового канала радиосвязи.
На чертеже приведена блок-схема системы управления маневровыми передвижениями.
Система управления маневровыми передвижениями содержит на локомотиве блок 1 автоматической локомотивной сигнализации, выход которого соединен с первым входом 2 управления блока 3 торможения, и блок 4 приемопередатчика типовой поездной радиосвязи, связанный по аналоговому каналу радиосвязи с входом блока 5 приемопередатчика типовой поездной радиосвязи руководителя маневров. На локомотиве введен блок 6 бортового приемопередатчика цифрового канала радиосвязи, который своим портом через блок 7 сопряжения соединен со вторым входом 8 управления блока 3 торможения, а на оси пути приема состава позади тупиковой призмы размещен блок 9 лазерного измерителя скорости и дальности, своим портом последовательного интерфейса соединенный с первым портом 10 последовательного интерфейса микропроцессора 11, второй порт 12 которого соединен с блоком 13 стационарного приемопередатчика цифрового канала радиосвязи.
Система работает следующим образом.
При движении поезда по кодируемым путям машинист руководствуется показаниями локомотивного светофора блока 1 автоматической локомотивной сигнализации и периодически подтверждает бдительность для предотвращения вырабатывания блоком 3 сигнала экстренного торможения. При проведении маневров при осаживании вагонами вперед пассажирского состава под посадку, блок 1 автоматической локомотивной сигнализации не принимает кодовых сигналов АЛСН и машинист ведет поезд, руководствуясь показаниями светофоров и указаниями руководителя маневров по поездной радиосвязи или громкоговорящей связи. Для предотвращения превышения поездом допустимой по условиям безопасности движения скорости блок 9 лазерного измерителя скорости и дальности непрерывно контролирует скорость и расстояние до приближающегося поезда. В памяти микропроцессора 11 находится подпрограмма вычисления допустимой скорости движения поезда при маневрах. Микропроцессор 11 с достаточно малой периодичностью сравнивает фактическую скорость поезда с расчетной допустимой скоростью и при превышении фактической скорости над расчетной допустимой скоростью через блок 13 стационарного приемопередатчика цифрового канала радиосвязи передает на локомотив сигналы служебного или экстренного торможения. Этот сигнал воспринимается блоком 6 бортового приемопередатчика цифрового канала радиосвязи и далее через блок 7 сопряжения воздействует на второй вход 8 управления блоком 3 торможения. Блок 3 реализует по полученному сигналу соответствующий режим торможения аналогично тому, как это делается в типовых системах (АЛСН, АЛС-ЕН, АЛСЕ-САУТ).
Блок 9 лазерного измерителя скорости и дальности измеряет время, затраченное инфракрасным лучом на прохождение пути до объекта и обратно в исходную точку. Он посылает 50-100 инфракрасных лучей за 1 секунду, что позволяет сделать большее количество замеров и, сравнив их, вычислить скорость и расстояние до приближающегося состава. Лазерные измерители скорости и дальности лазерного типа способны сделать несколько сотен замеров дистанции менее чем за 1/2 долю секунды. Кроме того, малая ширина инфракрасного луча позволяет однозначно зафиксировать цель на расстоянии до 400 метров с точностью измерения дальности 0,3 метра и скорости порядка 0,1 м/сек, сохраняя работоспособность как в обычных, так и в сложных погодных условиях (слабый снег, дождь или туман) (см., например, лазерный измеритель скорости и дальности ЛИСД-2М). Канал цифровой радиосвязи необходим для передачи кодированной информации только между соответствующими друг другу бортовым и стационарным приемопередатчиками. Это достигается построением протокола связи. Инициирует установление связи блок 13 стационарного приемопередатчика. Это происходит после того, как блок 9 лазерного измерителя скорости и дальности сообщает блоку 11 микропроцессора о нахождении по данному пути ближе, чем на предопределенном в программе расстоянии, движущегося объекта. Блок 13 стационарного приемопередатчика посылает пакет запроса на приближающийся локомотив. Пакет запроса содержит уникальный адрес блока 6 бортового приемопередатчика цифрового канала радиосвязи. Этот уникальный адрес формируется блоком 11 микропроцессора на основе информации о номере ожидаемого локомотива и вводится в блок 13 стационарного приемопередатчика руководителем маневров или его уполномоченным. В пакете запроса содержится уникальный адрес блока 13 стационарного приемопередатчика и расчетная допустимая скорость. Блок 6 бортового приемопередатчика ожидаемого локомотива на принятый запрос возвращает соответствующему блоку 13 стационарного приемопередатчика пакет подтверждения установления связи, а машинисту через блок 7 сопряжения дает индикацию о допустимой скорости, рассчитанной блоком 11 микропроцессора. Построение приемопередатчиков цифрового канала радиосвязи возможно как для имеющегося в настоящее время на железнодорожном транспорте канала диапазона 160 MHz, так и на основе общепромышленного диапазона частот 330-340 MHz, 430-434 MHz (ISM band). Выпускаемые промышленностью программируемые модули приемопередатчиков маломощной радиосвязи (например, модули Texas Instruments на основе микросхем CC1110) для общепромышленного диапазона частот обеспечивают устойчивую связь на расстоянии до 0.5 и более километра. Такие модули потребляют ток 30-40 мА от источника постоянного тока напряжением 3 В, дешевы, малогабаритны, имеют собственный микропроцессор и последовательный интерфейс связи.
Таким образом, использование предлагаемого изобретения обеспечивает повышенную точность управления и, как следствие, повышение безопасности при маневровой работе.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЕЗДОВ | 2012 |
|
RU2508218C1 |
| АВТОМАТИЧЕСКАЯ СИСТЕМА ПРИНУДИТЕЛЬНОЙ ОСТАНОВКИ МАНЕВРОВОГО ЛОКОМОТИВА ПРИ ПРОВЕДЕНИИ МАНЕВРОВ НА ТУПИКОВЫХ ПУТЯХ СТАНЦИЙ | 2010 |
|
RU2436698C2 |
| АВТОМАТИЧЕСКАЯ СИСТЕМА ПРИНУДИТЕЛЬНОЙ ОСТАНОВКИ ПОЕЗДОВ И МАНЕВРОВЫХ СОСТАВОВ У ПУТЕВЫХ УПОРОВ ПРИ ДВИЖЕНИИ НА ТУПИКОВЫХ ПУТЯХ СТАНЦИИ | 2013 |
|
RU2529561C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЕЗДОВ | 2012 |
|
RU2519317C1 |
| СПОСОБ И КОМПЛЕКСНАЯ СИСТЕМА БЕЗОПАСНОСТИ (КСБ) ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПРИЦЕЛЬНЫМ ТОРМОЖЕНИЕМ ПОДВИЖНОГО СОСТАВА | 2008 |
|
RU2392133C1 |
| ЦИФРОВАЯ СИСТЕМА РАДИОСВЯЗИ НА ЖЕЛЕЗНОДОРОЖНОМ ТРАНСПОРТЕ | 2014 |
|
RU2546143C1 |
| УНИФИЦИРОВАННЫЙ ВЫЧИСЛИТЕЛЬНЫЙ КОМПЛЕКС СИСТЕМЫ ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ | 2009 |
|
RU2405702C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЕЗДОВ | 2009 |
|
RU2381125C1 |
| Система интервального регулирования движения поездов | 2021 |
|
RU2763082C1 |
| СИСТЕМА АВТОМАТИЧЕСКОЙ ЛОКОМОТИВНОЙ СИГНАЛИЗАЦИИ | 2010 |
|
RU2429153C1 |
Система относится к области железнодорожной автоматики и телемеханики и может быть использована в системах автоматического управления движением поездов на станциях. Система содержит на локомотиве блок автоматической локомотивной сигнализации, выход которого соединен с первым входом управления блоком автостопного торможения, и бортовой блок типовой поездной радиосвязи, связанный по аналоговому каналу радиосвязи с блоком типовой поездной радиосвязи руководителя маневров. На локомотиве введен блок бортового приемопередатчика цифрового канала радиосвязи, который своим портом через блок сопряжения соединен со вторым входом управления блоком торможения. На оси пути приема состава позади тупиковой призмы размещен блок лазерного измерителя скорости и дальности, своим портом последовательного интерфейса соединенный с первым портом последовательного интерфейса микропроцессора. Второй порт микропроцессора соединен с блоком стационарного приемопередатчика цифрового канала радиосвязи. Технический результат заключается в расширении функциональных возможностей и повышении точности управления. 1 ил.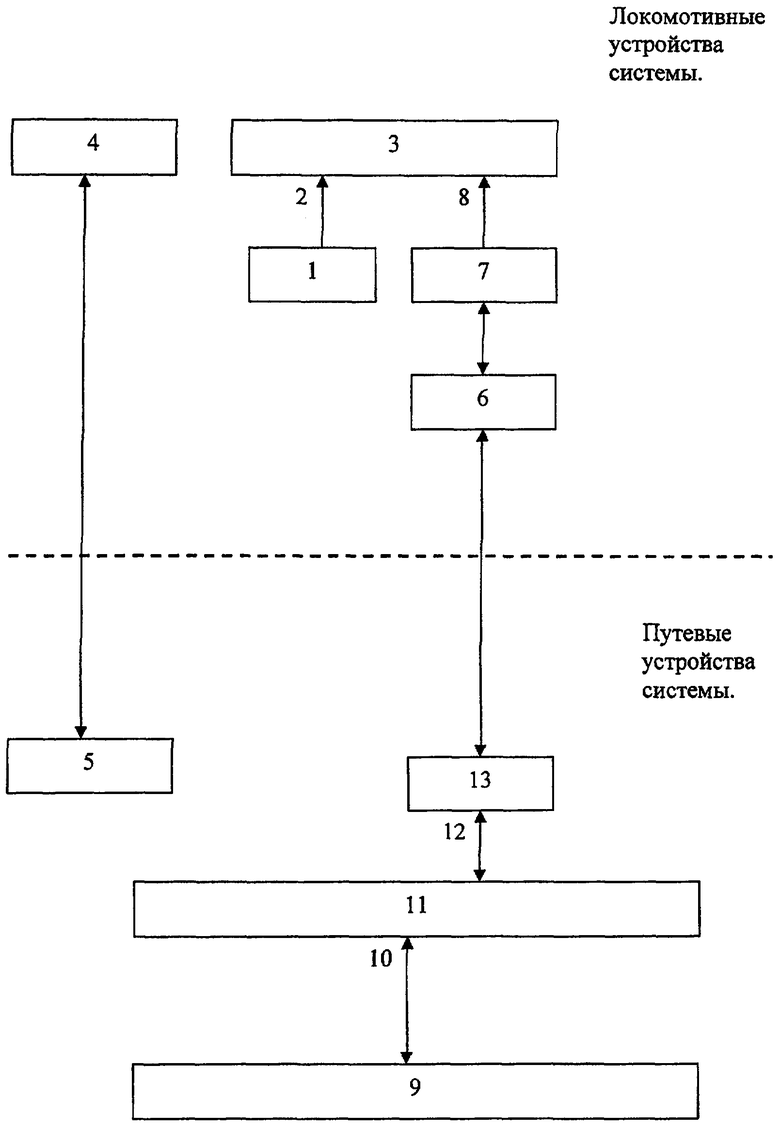
Система управления маневровыми передвижениями, содержащая на локомотиве блок автоматической локомотивной сигнализации, выход которого соединен с первым входом управления блоком автостопного торможения и бортовой блок приемопередатчика поездной радиосвязи, связанный по аналоговому каналу радиосвязи с блоком приемопередатчика поездной радиосвязи руководителя маневров, отличающаяся тем, что на локомотиве введен блок бортового приемопередатчика цифрового канала радиосвязи, который своим портом через блок сопряжения соединен со вторым входом управления блоком автостопного торможения, а на оси пути приема состава, позади тупиковой призмы, размещен блок лазерного измерителя скорости и дальности, своим портом последовательного интерфейса соединенный с первым портом последовательного интерфейса микропроцессора, второй порт которого соединен с блоком стационарного приемопередатчика цифрового канала радиосвязи.
| ЕР 0736441 А1, 09.10.1996 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОДВИЖНОГО ОБЪЕКТА, СПОСОБ ИДЕНТИФИКАЦИИ АБОНЕНТОВ И ОПРЕДЕЛЕНИЯ ИХ МЕСТОПОЛОЖЕНИЯ И СИСТЕМА РАДИОСВЯЗИ АБОНЕНТОВ С ЦЕНТРАЛЬНОЙ СТАНЦИЕЙ С ИДЕНТИФИКАЦИЕЙ АБОНЕНТОВ И ОПРЕДЕЛЕНИЕМ ИХ МЕСТОПОЛОЖЕНИЯ | 1997 |
|
RU2126174C1 |
| СПОСОБ ДИСТАНЦИОННОГО КОНТРОЛЯ ГАБАРИТОВ ГРУЗОВ, ПОГРУЖЕННЫХ НА ПОДВИЖНОЙ СОСТАВ, В ПРОЦЕССЕ ИХ ДВИЖЕНИЯ И СИСТЕМА ЭЛЕКТРОННЫХ ГАБАРИТНЫХ ВОРОТ ДЛЯ ДИСТАНЦИОННОГО КОНТРОЛЯ ГАБАРИТОВ ГРУЗОВ, ПОГРУЖЕННЫХ НА ПОДВИЖНОЙ СОСТАВ, В ПРОЦЕССЕ ИХ ДВИЖЕНИЯ | 2004 |
|
RU2249523C1 |
| ГОРОЧНОЕ ПРОГРАММНО-ЗАДАЮЩЕЕ УСТРОЙСТВО | 1998 |
|
RU2157773C2 |
| СПОСОБ И СИСТЕМА ДИСТАНЦИОННОГО КОНТРОЛЯ НЕГАБАРИТНОСТИ ГРУЗОВ НА ПОДВИЖНОМ СОСТАВЕ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА | 2006 |
|
RU2311311C2 |

