Изобретение относится к измерительной технике и может быть применено в системах измерения линейного перемещения.
Известен способ измерения линейного перемещения (патент RU №2125235, МКИ G01B 17/00, 1999 г.), заключающийся в том, что при измерении линейных перемещений измеряют время распространения ультразвуковой волны от неподвижного элемента возбуждения ультразвуковой волны до подвижного элемента приема ультразвуковой волны, соединенного с контролируемым объектом, и по значению этого времени судят о величине линейного перемещения объекта, перед измерением времени распространения ультразвуковой волны устанавливают подвижный элемент приема на самое близкое расстояние к неподвижному элементу возбуждения и измеряют длительность образцового импульса ультразвуковой волны, а после перемещения подвижного элемента приема вместе с контролируемым объектом на измеряемое расстояние перед каждым измерением времени распространения ультразвуковой волны измеряют длительность рабочего импульса ультразвуковой волны, вычитают ее из длительности образцового импульса и по значению полученной разности определяют величину тока подвижного элемента возбуждения. Кроме того, перед каждым циклом измерения в приемной части устанавливают пороговое напряжение, в k раз большее напряжения шума, где k - коэффициент, определяемый требованиями к помехоустойчивости, а время распространения ультразвуковой волны от зоны возбуждения до зоны приема tx, пропорциональное измеряемому перемещению, определяют из выражения
 ,
,
где t'i и t''i - моменты срабатывания порогового устройства приемной части при приеме импульсов ультразвуковой волны соответственно передним и задним фронтам этих импульсов;
n - число импульсов ультразвуковой волны, определяемое требованиями к точности и быстродействию.
Недостатком данного способа является невысокая точность из-за наличия в результате преобразования погрешности, обусловленной временной аппаратной задержкой, вызванной, например, изменением от температуры параметров элемента приема ультразвуковой волны. Например, если элементом приема ультразвуковой волны является индуктивная катушка, то изменяются индуктивность и сопротивление.
Наиболее близким по технической сущности и достигаемому результату к заявляемому является способ, реализуемый в устройстве магнитострикционного преобразователя линейных перемещений (авт.св. СССР №634494, МКИ4 H04R 17/00, 1978 г.), в котором информацией о перемещении служит отношение частоты циркуляции упругих колебаний в опорном канале к частоте циркуляции упругих колебаний в рабочем канале, и, таким образом, выходная величина не зависит от скорости распространения упругих колебаний в звукопроводе.
Наиболее близким по технической сущности и достигаемому результату к заявленному является ультразвуковой преобразователь перемещений (авт. св. СССР №1742618, МКИ5 G01B 17/00, 1992 г.), содержащий линейный магнитострикционный волновод, первый и второй акустический демпферы, генератор тока возбуждения, входной электроакустический преобразователь, выходной электроакустический преобразователь и одновибратор.
Недостатком прототипа является невысокая точность из-за наличия составляющей погрешности, вызываемой временной аппаратной задержкой в приемном устройстве.
Задачей, на решение которой направлено заявляемое изобретение, является повышение точности измерения линейного перемещения за счет коррекции составляющей погрешности, вызванной аппаратной задержкой.
Решение поставленной задачи достигается тем, что в способе измерения линейного перемещения возбуждают ультразвуковые колебания в звукопроводе магнитострикционного преобразователя в отличие от прототипа проводят калибровку, включающую перемещение подвижного приемного электроакустического преобразователя, соединенного с подвижным концом упругого элемента, на первое известное расстояние l1 между подвижным приемным и неподвижным возбуждающим электроакустическими преобразователями, возбуждение первой ультразвуковой волны, которую принимают приемным электроакустическим преобразователем, определение первого интервала времени t1, за которое ультразвуковая волна проходит первое известное расстояние, и занесение первого кода, пропорционального первому интервалу времени, в память контроллера, перемещение приемного электроакустического преобразователя, соединенного с подвижным концом упругого элемента, на второе известное расстояние l2 между подвижным приемным и неподвижным возбуждающим электроакустическими преобразователями, возбуждение второй ультразвуковой волны, которую принимают приемным электроакустическим преобразователем, определение второго интервала времени t2, за которое волна проходит второе известное расстояние, и занесение второго кода, пропорционального второму интервалу времени, в память контроллера, далее проводят измерение, в котором приемный электроакустический преобразователь, соединенный с подвижным концом упругого элемента, входит в механический контакт с контролируемым объектом и занимает определенное положение по отношению к неподвижному возбуждающему электроакустическому преобразователю, электроакустическим преобразователем возбуждают третью ультразвуковую волну, которую принимают приемным электроакустическим преобразователем, определяют третий интервал времени t3, за которое волна достигает приемного электроакустического преобразователя, заносят третий код, пропорциональный третьему интервалу времени, в память контроллера, затем рассчитывают скорость звуковой волны и аппаратную задержку по формулам:
 ;
;
 ,
,
где V - скорость ультразвуковой волны,
l1 и l2 - расстояния, на которые выходной приемный электроакустический преобразователь перемещается в режиме калибровки,
t1 и t2 - интервалы времени, за которые ультразвуковая волна проходит расстояния l1 и l2,
t4 - аппаратная временная задержка,
и занесенных в память кодах, пропорциональных значениям l1, l2, t1, t2, а также расстояние x, на которое переместился контролируемый объект, по формуле
 .
.
Решение поставленной задачи достигается также тем, что в устройство для измрения линейного перемещения, состоящее из линейного магнитострикционного волновода, первого и второго акустического демпферов, входного электроакустического преобразователя, выходного электроакустического преобразователя в отличие от прототипа введены упругий элемент, который может быть реализован, например, на основе пружины, подвижный конец которого соединен с выходным электроакустическим преобразователем и имеет механический контакт с объектом контроля, соединенный с концами двух коаксиальных трубок различного диаметра, причем внутренний диаметр наружной трубки больше внешнего диаметра внутренней трубки, с обеспечением гарантированного воздушного зазора, при этом один конец внутренней трубки соединен с одним концом упругого элемента, а другой конец трубки неподвижно закреплен относительно звукопровода, а второй конец упругого элемента соединен с концом наружной трубки, обращенным к объекту контроля и контактирующего с ним, при этом коаксиальные трубки расположены параллельно звукопроводу, и перед началом режима калибровки или измерения упругий элемент расположен так, что его подвижный конец контактирует с объектом контроля, на подвижном конце упругого элемента расположен Г-образный выступ, который позволяет датчикам малых линейных перемещений регистрировать достижение подвижным концом упругого элемента и приемным электроакустическим преобразователем первого и второго известного расстояний, и выходной электроакустический преобразователь, два датчика малых линейных перемещений, закрепленных на первом и втором известных расстояниях, электродвигатель, перемещающий подвижный конец упругого элемента, контроллер, связанный с электродвигателем, входным электроакустическим преобразователем, выходным электроакустическим преобразователем, с датчиками малых линейных перемещений.
Сущность изобретения поясняется чертежом. На чертеже изображена схема устройства. (Подвод питания элементов на чертеже условно не показан.)
Устройство для реализации способа содержит магнитострикционный преобразователь 1, звукопровод 2 (волновод) [Ультразвук. Маленькая энциклопедия. Глав. редактор И.П.Голямина. - М.: «Советская энциклопедия», 1979 г. - 400 с., с 44] из магнитострикционного материала, входной (возбуждающий) электроакустический преобразователь (ЭАП) 3, неподвижно расположенный относительно звукопровода, выходной (приемный) ЭАП 4, жестко соединенный с подвижным концом упругого элемента 5, акустические демпферы 6 и 7, расположенные на концах звукопровода, упругий элемент 5, имеющий контакт с объектом контроля, электродвигатель 8, датчики малых линейных перемещений 9 и 10, а также контроллер 11.
Устройство работает следующим образом. Перед циклом измерений производят калибровку. Для этого подвижный конец упругого элемента и закрепленный на нем выходной ЭАП 4 перемещаются с электродвигателем 8 на первое известное расстояние.
Один подвижный конец упругого элемента с выходной ЭАП 4 перемещается параллельно звукопроводу 2. Достижение подвижным концом упругого элемента первого известного расстояния регистрирует первый датчик малых линейных перемещений 9, закрепленный на уровне первого известного расстояния l1. При достижении подвижным концом упругого элемента первого известного расстояния l1 срабатывает датчик малых линейных перемещений 9, контроллер 11, получив сигнал с датчика малых линейных перемещений 9, подает сигнал на останов электродвигателя 8, что приводит к останову и подвижного конца упругого элемента 5. Таким образом, выходной ЭАП 4 перемещается на первое известное расстояние l1. Затем с контроллера 11 во входной ЭАП 3 поступает импульс напряжения, что вызывает появление ультразвуковой волны. Через интервал времени t1 ультразвуковая волна достигает выходного ЭАП 4. Интервал времени t1 определяется измерителем временных интервалов, реализованным на основе контроллера 11, преобразуется в код, который заносится в память контроллера 11.
Затем аналогичным образом выходной ЭАП 4 перемещается на второе известное расстояние l2. Интервал времени t2, за который ультразвуковая волна достигает выходного ЭАП 4, также преобразуется в код, который заносится в память контроллера 11.
Затем контроллер производит вычисления и определяет величины скорости распространения ультразвуковой волны и аппаратной временной задержки из системы уравнений
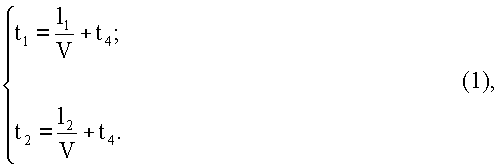
где l1 и l2 - расстояния, на которые выходной ЭАП перемещается в режиме калибровки,
V - скорость ультразвуковой волны,
t4 - аппаратная временная задержка, обусловленная, например, изменением индуктивности и сопротивления.
И соответственно величине скорость распространения ультразвуковой волны V и аппаратная временная задержка t4 определяются из системы уравнений (1)


Контроллер осуществляет вычислительные операции по формулам (2) и (3) и заносит в свою память коды, пропорциональные скорости распространения ультразвуковой волны V и аппаратной задержки t4.
В режиме измерения под воздействием упругого элемента 5 происходит механический контакт выходного ЭАП 4 с объектом контроля, и выходной ЭАП 4 перемещается на измеряемое расстояние. Во входной ЭАП 3 с контроллера 11 поступает импульс напряжения, приводящий к появлению ультразвуковой волны. Через интервал времени t3 ультразвуковая волна, пройдя измеряемое расстояние, достигает выходного ЭАП 4. Этот интервал времени преобразуется в код. Контроллер 11, основываясь на занесенных ранее в память кодах, пропорциональных скорости распространения ультразвуковой волны V и аппаратной задержки t4, производит расчет измеряемого расстояния по формуле:

Пример конкретной реализации способа
На основе данного способа были произведены измерения на модели, диапазон измерения которой равен 500 мм.
Перед циклом измерений производится калибровка. Для этого подвижный конец упругого элемента и закрепленный на нем выходной ЭАП перемещается управляемым электродвигателем [Хрущев В.В. Электрические машины систем автоматики: Учебник для ВУЗов. - Л.: Энергоатомиздат., Ленингр. отделение, 1985-368 с., с 282] на первое известное расстояние l1, равное, например, 100 мм.
Один подвижный конец упругого элемента с приемным ЭАП 4 перемещается параллельно звукопроводу 2. Достижение подвижным концом упругого элемента 5 первого известного расстояния регистрирует первый датчик малых линейных перемещений 9, например с цифровым выходом, закрепленный на уровне первого известного расстояния l1. При достижении первого известного расстояния l1 подвижным концом упругого элемента 5 срабатывает датчик малых линейных перемещений 9. Контроллер 11 [Гребнев В.В. Микроконтроллеры семейства AVR фирмы Atmel. - M.: ИП Радиософт, 2002, 176 с.], получив сигнал с датчика малых линейных перемещений 9, подает сигнал на останов электродвигателя 8, что приводит к останову и подвижного конца упругого элемента 5. Таким образом, выходной ЭАП 4 перемещается на первое известное расстояние l1, равное, например, 100 мм. Затем с контроллера 11 во входной ЭАП 3 поступает импульс напряжения, что вызывает появление ультразвуковой волны. Через интервал времени t1 ультразвуковая волна достигает выходного ЭАП 4. Интервал времени t1 определяется измерителем временных интервалов, реализованным на основе контроллера 11, преобразуется в код, который заносится в память контроллера. В результате интервал времени t1 оказался равен 21 мкс.
Затем аналогичным образом выходной ЭАП 4 перемещается на второе известное расстояние l2, равное, например, 50 мм. Интервал времени t2, за который ультразвуковая волна достигает выходного ЭАП 4, также преобразуется в код, который заносится в память контроллера 11. Интервал времени t2 оказался равным 11 мкс.
Затем, контроллер производит вычисления и определяет величины скорости распространения ультразвуковой волны и аппаратной временной задержки из системы уравнений
где l1 и l2 - расстояния, на которые выходной ЭАП перемещается в режиме калибровки,
V - скорость ультразвуковой волны,
t4 - аппаратная временная задержка, обусловленная, например, изменением индуктивности и сопротивления.
И соответственно величине скорость распространения ультразвуковой волны V и аппаратная временная задержка t4 определяются из системы уравнений (1)
Контроллер осуществляет вычислительные операции по формулам (2) и (3) и заносит в свою память коды, пропорциональные скорости распространения ультразвуковой волны V и аппаратной задержки t4, которые оказались равными V=5·103 м/с, t4=1 мкс.
В режиме измерения из-за упругого элемента 5 происходит контакт выходного ЭАП 4 с объектом контроля, и выходной ЭАП 4 перемещается на измеряемое расстояние. В входной ЭАП 3 с контроллера 11 поступает импульс напряжения, приводящий к появлению ультразвуковой волны. Через интервал времени t3 ультразвуковая волна, пройдя измеряемое расстояние, достигает выходного ЭАП 4. Этот интервал времени преобразуется в код. Длительность интервала времени t3=55 мкс. Контроллер 11, основываясь на занесенных ранее в память кодах, пропорциональных скорости распространения ультразвуковой волны V и аппаратной задержки t4, производит расчет измеряемого расстояния по формуле (4).
В результате, значение измеряемого расстояния х оказалось равным 270 мм.
Применение данного способа измерения линейного перемещения позволяет исключить составляющую погрешности, вызванную аппаратной задержкой, а также вызванной изменением скорости распространения ультразвуковой волны по звукопроводу из-за нестабильности параметров окружающей среды.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КАЛИБРОВКИ МАГНИТОСТРИКЦИОННЫХ ПРЕОБРАЗОВАТЕЛЕЙ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ И УСТРОЙСТВО ЕГО РЕАЛИЗАЦИИ | 2015 |
|
RU2584577C1 |
| УЛЬТРАЗВУКОВОЙ УРОВНЕМЕР | 2002 |
|
RU2213940C1 |
| МАГНИТОСТРИКЦИОННЫЙ ДВУХКООРДИНАТНЫЙ НАКЛОНОМЕР | 2008 |
|
RU2389975C2 |
| УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 2005 |
|
RU2299401C2 |
| УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 2005 |
|
RU2318186C2 |
| МАГНИТОСТРИКЦИОННЫЙ УРОВНЕМЕР-ИНДИКАТОР | 2005 |
|
RU2298155C1 |
| СПОСОБ ИЗМЕРЕНИЯ ЛИНЕЙНОГО ПЕРЕМЕЩЕНИЯ | 2008 |
|
RU2374608C1 |
| УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ СКОРОСТИ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 1992 |
|
RU2032179C1 |
| УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЯ И СКОРОСТИ ДВИЖЕНИЯ | 2004 |
|
RU2271515C1 |
| УРОВНЕМЕР-ИНДИКАТОР | 2005 |
|
RU2298156C1 |
Изобретение относится к измерительной технике и может быть применено в системах измерения линейного перемещения. Техническим результатом является повышение точности измерения линейного перемещения за счет коррекции составляющей погрешности, вызванной аппаратной задержкой. Предложены способ и устройство для его реализации. Устройство содержит магнитострикционный преобразователь 1, звукопровод из магнитострикционного материала 2, возбуждающий электроакустический преобразователь (ЭАП) 3, неподвижно расположенный относительно звукопровода приемный ЭАП 4, жестко соединенный с подвижным концом упругого элемента 5, имеющего контакт с объектом контроля, акустические демпферы 6 и 7, расположенные на концах звукопровода, электродвигатель 8, датчики малых линейных перемещений 9 и 10, а так же контроллер 11. 2 н.п. ф-лы, 1 ил.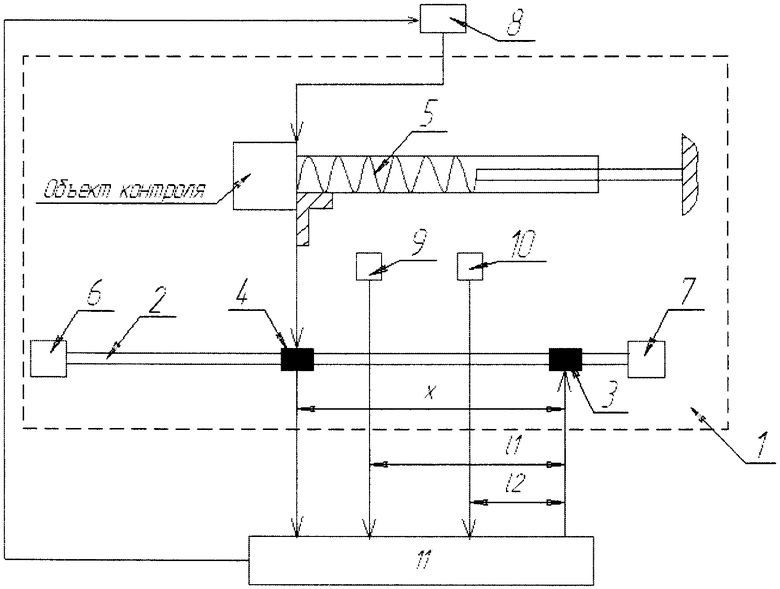
1. Способ измерения линейного перемещения, заключающийся в том, что возбуждают ультразвуковые колебания в звукопроводе магнитострикционного преобразователя, отличающийся тем, что проводят калибровку, включающую перемещение подвижного приемного электроакустического преобразователя, соединенного с подвижным концом упругого элемента, на первое известное расстояние l1 между подвижным приемным и неподвижным возбуждающим электроакустическими преобразователями, возбуждение первой ультразвуковой волны, которую принимают приемным электроакустическим преобразователем, определение первого интервала времени t1, за которое ультразвуковая волна проходит первое известное расстояние, и занесение первого кода, пропорционального первому интервалу времени, в память контроллера, перемещение приемного электроакустического преобразователя, соединенного с подвижным концом упругого элемента, на второе известное расстояние l2 между подвижным приемным и неподвижным возбуждающим электроакустическими преобразователями, возбуждение второй ультразвуковой волны, которую принимают приемным электроакустическим преобразователем, определение второго интервала времени t2, за которое волна проходит второе известное расстояние, и занесение второго кода, пропорционального второму интервалу времени, в память контроллера, далее проводят измерение, в котором приемный электроакустический преобразователь, соединенный с подвижным концом упругого элемента, входит в механический контакт с контролируемым объектом, и занимает определенное положение по отношению к неподвижному возбуждающему электроакустическому преобразователю, электроакустическим преобразователем возбуждают третью ультразвуковую волну, которую принимают приемным электроакустическим преобразователем, определяют третий интервал времени t3, за которое волна достигает приемного электроакустического преобразователя, заносят третий код, пропорциональный третьему интервалу времени, в память контроллера, затем рассчитывают скорость звуковой волны и аппаратную задержку по формулам:
где V - скорость ультразвуковой волны;
l1 и l2 - расстояния, на которые выходной приемный электроакустический преобразователь перемещается в режиме калибровки;
t1 и t2 - интервалы времени, за которые ультразвуковая волна проходит расстояния l1 и l2;
t4 - аппаратная временная задержка,
и занесенных в память кодах, пропорциональных значениям l1, l2, t1, t2, a также расстояние х, на которое переместился контролируемый объект, по формуле

2. Устройство для измерения линейного перемещения, содержащее линейный магнитострикционный волновод, первый и второй акустические демпферы, входной электроакустический преобразователь, выходной электроакустический преобразователь, отличающееся тем, что введены упругий элемент, который может быть реализован, например, на основе пружины, подвижный конец которого соединен с выходным электроакустическим преобразователем и имеет механический контакт с объектом контроля, соединенный с концами двух коаксиальных трубок различного диаметра, причем внутренний диаметр наружной трубки больше внешнего диаметра внутренней трубки, с обеспечением гарантированного воздушного зазора, при этом один конец внутренней трубки соединен с одним концом упругого элемента, а другой конец трубки неподвижно закреплен относительно звукопровода, а второй конец упругого элемента соединен с концом наружной трубки, обращенным к объекту контроля и контактирующего с ним, при этом коаксиальные трубки расположены параллельно звукопроводу, и перед началом режима калибровки или измерения упругий элемент расположен так, что его подвижный конец контактирует с объектом контроля, на подвижном конце упругого элемента расположен Г-образный выступ, который позволяет датчикам малых линейных перемещений регистрировать достижение подвижным концом упругого элемента и приемным электроакустическим преобразователем первого и второго известного расстояний, и выходной электроакустический преобразователь, два датчика малых линейных перемещений, закрепленных на первом и втором известных расстояниях, электродвигатель, перемещающий подвижный конец упругого элемента, контроллер, связанный с электродвигателем, входным электроакустическим преобразователем, выходным электроакустическим преобразователем, с датчиками малых линейных перемещений.
| RU 2007119340 А, 27.11.2008 | |||
| УСТРОЙСТВО ИЗМЕРЕНИЯ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ (ВАРИАНТЫ) | 2006 |
|
RU2332639C2 |
| СПОСОБ ИЗМЕРЕНИЯ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 1996 |
|
RU2117914C1 |
| JP 2004205321 A, 22.07.2004 | |||
| JP 2000009456 A, 14.01.2000 | |||
| RO 112788 B1, 30.12.1997. | |||

