Изобретение относится к измерительной технике и может быть применено в системах измерения линейного перемещения.
Известен способ измерения линейного перемещения (патент RU №2125235, МКИ G01B 17/00, 1999 г.), заключающийся в том, что при измерении линейных перемещений измеряют время распространения ультразвуковой волны от неподвижного элемента возбуждения ультразвуковой волны до подвижного элемента приема ультразвуковой волны, соединенного с контролируемым объектом, и по значению этого времени судят о величине линейного перемещения объекта, перед измерением времени распространения ультразвуковой волны устанавливают подвижный элемент приема на самое близкое расстояние к неподвижному элементу возбуждения и измеряют длительность образцового импульса ультразвуковой волны, а после перемещения подвижного элемента приема вместе с контролируемым объектом на измеряемое расстояние перед каждым измерением времени распространения ультразвуковой волны измеряют длительность рабочего импульса ультразвуковой волны, вычитают ее из длительности образцового импульса и по значению полученной разности определяют величину тока подвижного элемента возбуждения. Кроме того, перед каждым циклом измерения в приемной части устанавливают пороговое напряжение, в k раз большее напряжения шума, где k - коэффициент, определяемый требованиями к помехоустойчивости, а время распространения ультразвуковой волны от зоны возбуждения до зоны приема tx, пропорциональное измеряемому перемещению, определяют из выражения
где t′i и t″i - моменты срабатывания порогового устройства приемной части при приеме импульсов ультразвуковой волны соответственно передним и задним фронтам этих импульсов;
n - число импульсов ультразвуковой волны, определяемое требованиями к точности и быстродействию.
Недостатком данного способа является невысокая точность из-за наличия в результате преобразования погрешности, обусловленной временной аппаратной задержкой, вызванной, например, изменением от температуры параметров элемента приема ультразвуковой волны. Например, если элементом приема ультразвуковой волны является индуктивная катушка, то изменяются индуктивность и сопротивление.
Также известен способ, реализуемый в устройстве магнитострикционного преобразователя линейных перемещений (авт.св. СССР №634494, МКИ4 H04R 17/00, 1978 г.), в котором информацией о перемещении служит отношение частоты циркуляции упругих колебаний в опорном канале к частоте циркуляции упругих колебаний в рабочем канале, и, таким образом, выходная величина не зависит от скорости распространения упругих колебаний в звукопроводе.
Недостатком данного способа является технически сложное выставление контрольного расстояния а, а также необходимость подведения электропитания к подвижному элементу.
Также наиболее близким по технической сущности и достигаемому результату к заявленному является способ измерения линейного перемещения (РФ №2391626, G01B 17/00, 2010 г.)
При достижении выходным электроакустическим преобразователем (ЭАП) первого известного расстояния с контроллера во входной ЭАП поступает импульс напряжения, что вызывает появление ультразвуковой волны. Через интервал времени t1 ультразвуковая волна достигает выходного ЭАП 4. Интервал времени t1 определяют измерителем временных интервалов, реализованным на основе контроллера, преобразуют в код, который заносится в память контроллера.
Затем аналогичным образом выходной ЭАП перемещают на второе известное расстояние l2. Интервал времени t2, за который ультразвуковая волна достигает выходного ЭАП, также преобразуют в код, который заносится в память контроллера.
Затем, контроллер составляет систему из двух уравнений

где l1 и l2 - расстояния, на которые выходной ЭАП перемещают в режиме калибровки,
V - скорость ультразвуковой волны,
t4 - аппаратная временная задержка, обусловленная, например, изменением индуктивности и сопротивления.
Вычислительные операции по формулам (2) осуществляют с помощью контроллера.


В режиме измерения выходной ЭАП вместе с объектом контроля перемещается на измеряемое расстояние. Во входной ЭАП с контроллера поступает импульс напряжения, приводящий к появлению ультразвуковой волны. Через интервал времени t3 ультразвуковая волна, пройдя измеряемое расстояние, достигает выходного ЭАП. Этот интервал времени преобразуется в код. Контроллер, основываясь на занесенных ранее в память кодах, пропорциональных скорости распространения ультразвуковой волны V и аппаратной задержки t4, производит расчет измеряемого расстояния по формуле (4).

Недостатком способа является невысокая точность измерения, ограниченная разрешающей способностью датчиков малых перемещений, и трудоемкость выставления контрольных расстояний.
Известно также устройство магнитострикционного преобразователя линейных перемещений (авт.св. СССР №1742618, МКИ5 G01B 17/00, 1992 г.), содержащее линейный магнитострикционный волновод, первый и второй акустический демпферы, генератор тока возбуждения, входной электроакустический преобразователь, выходной электроакустический преобразователь и одновибратор.
Недостатком аналога является невысокая точность из-за наличия составляющей погрешности, вызываемой временной аппаратной задержкой в приемном устройстве.
Также наиболее близким по технической сущности и достигаемому результату к заявленному является устройство измерения линейного перемещения (РФ №2391626, G01B 17/00, 2010 г.), содержащее линейный магнитострикционный волновод, первый и второй акустические демпферы, входной электроакустический преобразователь, выходной электроакустический преобразователь, отличающееся тем, что введены упругий элемент, который может быть реализован, например, на основе пружины, подвижный конец которого соединен с выходным электроакустическим преобразователем и имеет механический контакт с объектом контроля, соединенный с концами двух коаксиальных трубок различного диаметра, причем внутренний диаметр наружной трубки больше внешнего диаметра внутренней трубки, с обеспечением гарантированного воздушного зазора, при этом один конец внутренней трубки соединен с одним концом упругого элемента, а другой конец трубки неподвижно закреплен относительно звукопровода, а второй конец упругого элемента соединен с концом наружной трубки, обращенным к объекту контроля и контактирующего с ним, при этом коаксиальные трубки расположены параллельно звукопроводу, и перед началом режима калибровки или измерения упругий элемент расположен так, что его подвижный конец контактирует с объектом контроля, на подвижном конце упругого элемента расположен Г-образный выступ, который позволяет датчикам малых линейных перемещений регистрировать достижение подвижным концом упругого элемента и приемным электроакустическим преобразователем первого и второго известного расстояний, и выходной электроакустический преобразователь, два датчика малых линейных перемещений, закрепленных на первом и втором известных расстояниях, электродвигатель, перемещающий подвижный конец упругого элемента, контроллер, связанный с электродвигателем, входным электроакустическим преобразователем, выходным электроакустическим преобразователем, с датчиками малых линейных перемещений.
Недостатком устройства является трудоемкость выставления контрольных расстояний, сложность конструкции, требуется непосредственно жесткий контакт объекта измерения и устройства измерения линейного перемещения, точность измерения ограничена чувствительностью датчиков малых перемещений.
Задачей, на решение которой направлено заявляемое изобретение, является повышение точности калибровки магнитострикционного преобразователя линейных перемещений и упрощения устройства калибровки.
Технический результат - повышение точности измерения перемещений за счет использования цифрового микроскопа при регистрации перемещения.
Поставленная задача решается, а технический результат достигается тем, что в способе калибровки магнитострикционного преобразователя линейных перемещений рассчитывают расстояние от начала координат эталонной шкалы до центра лазерной метки, для этого делают не менее пяти снимков: всей шкалы измерения, всей шкалы измерения с меткой в первом положении, участка в районе метки в первом положении, всей шкалы измерения в районе метки во втором положении и участка в районе метки во втором положении, и полученные снимки загружают в персональный компьютер и обрабатывают с помощью системы обработки видеоизображения, затем на первом снимке устанавливают границы эталонной шкалы и присваивают значения длины эталонной шкалы, что устанавливает масштабный коэффициент (КM):
где ХРеал - значение длины эталонной шкалы,
 - расчетная длина изображения (количество пикселей),
- расчетная длина изображения (количество пикселей),
NB - количество пикселей по вертикали изображения,
NГ - количество пикселей по горизонтали изображения,
на первый и второй снимки накладывают основную шкалу с шагом а, таким образом, чтобы деления шкалы совпадали с делениями шкалы на снимке:

где L - длина всей шкалы,
n - количество делений на основной шкале,
после чего производят определение метки на основной шкале, если метка находится на границе деления шкалы, то считают, что она не охватывает следующее деление шкалы, и определяют расстояние, соответствующее сумме целых шагов а на основной шкале по формуле:
где nх - это количество делений шкалы на участке, на который не попадает метка и длина участка, на который необходимо нанести дополнительную шкалу:
где nу=у+2 - количество делений дополнительной шкалы, которые пересекает метка с учетом двух крайних делений, которые метка не пересекает,
у - количество делений основной шкалы, которые пересекает метка, на снимке участка в первом положении дополнительно накладывает шкала с меньшим шагом деления b:

где m - это количество делений дополнительной шкалы внутри диапазона а, при этом значение m выбирается таким образом, чтобы центр метки попадал на деление дополнительной шкалы b, далее производят определение положения лазерной метки на дополнительной шкале путем вычисления координаты центра яркости метки:
где
где M - суммарная яркость пятна,
Мх - суммарная яркость по оси х,
Мy - суммарная яркость по оси у,
ω(х, у) - матричная функция значения яркости в точке,
М(х; у) - значение яркости метки в отдельном пикселе,
С(хс; ус) - центр яркости метки,
после этого определяется расстояние, соответствующее сумме целых делений b на дополнительной шкале:
где mх - это количество делений шкалы на отрезке lу,
аналогичные действия выполняют для снимка во втором положении, координата положения метки в первом положении вычисляется как:
далее последовательность операций повторяют для определения координаты метки во втором положении:
далее вычисляют перемещение метки из первого положения во второе положение:
Поставленная задача также решается тем, что в устройстве калибровки магнитострикционных преобразователей перемещений, содержащем эталонную шкалу, расположенную параллельно магнитострикционному преобразователю линейного перемещения, цифровой микроскоп, персональный компьютер, лазерный излучатель, жестко соединенный с подвижной частью магнитострикционного преобразователя линейных перемещений.
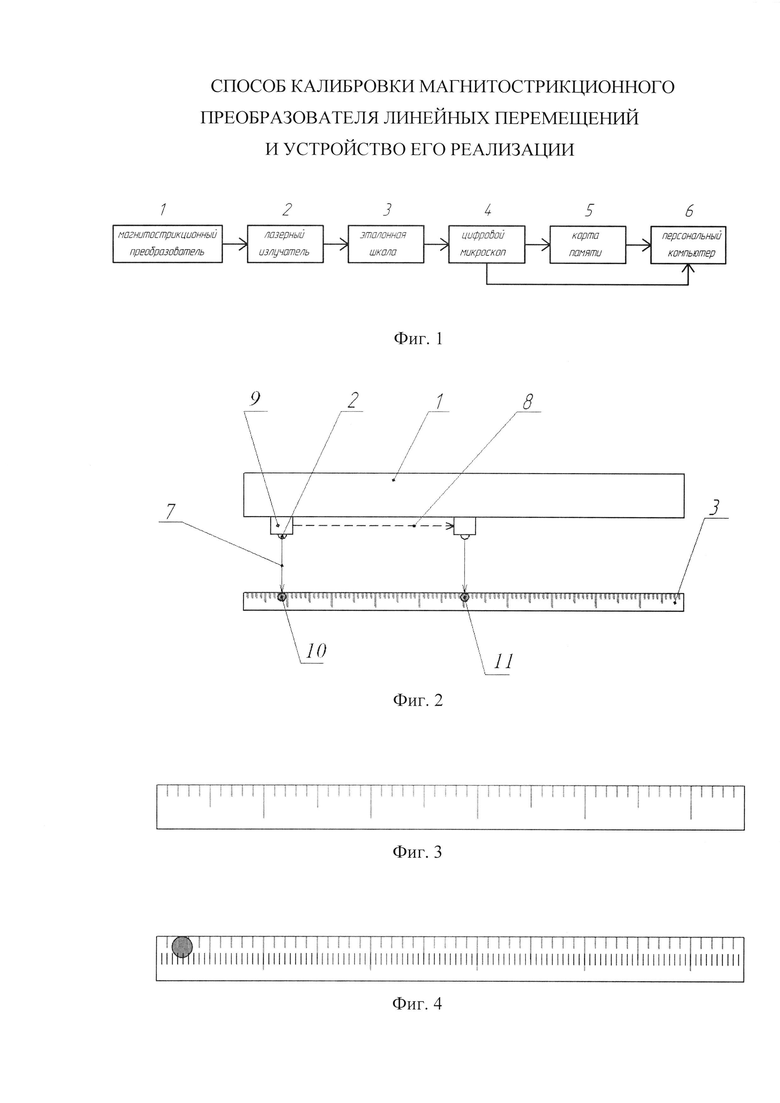
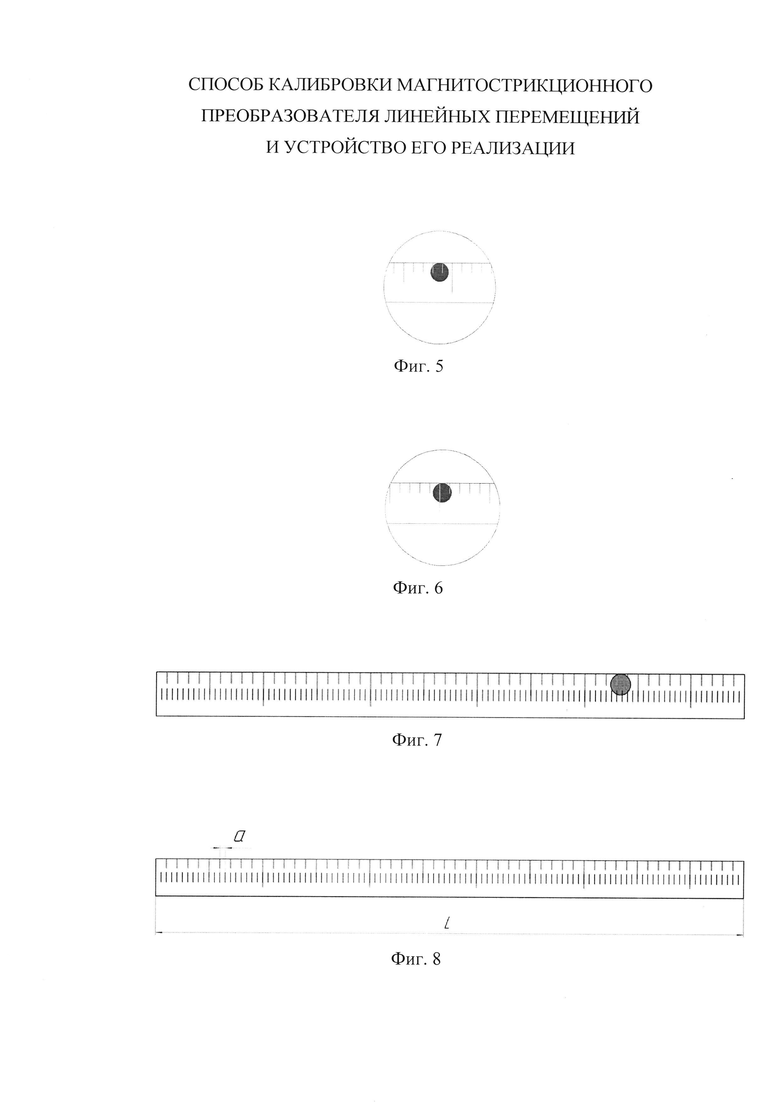
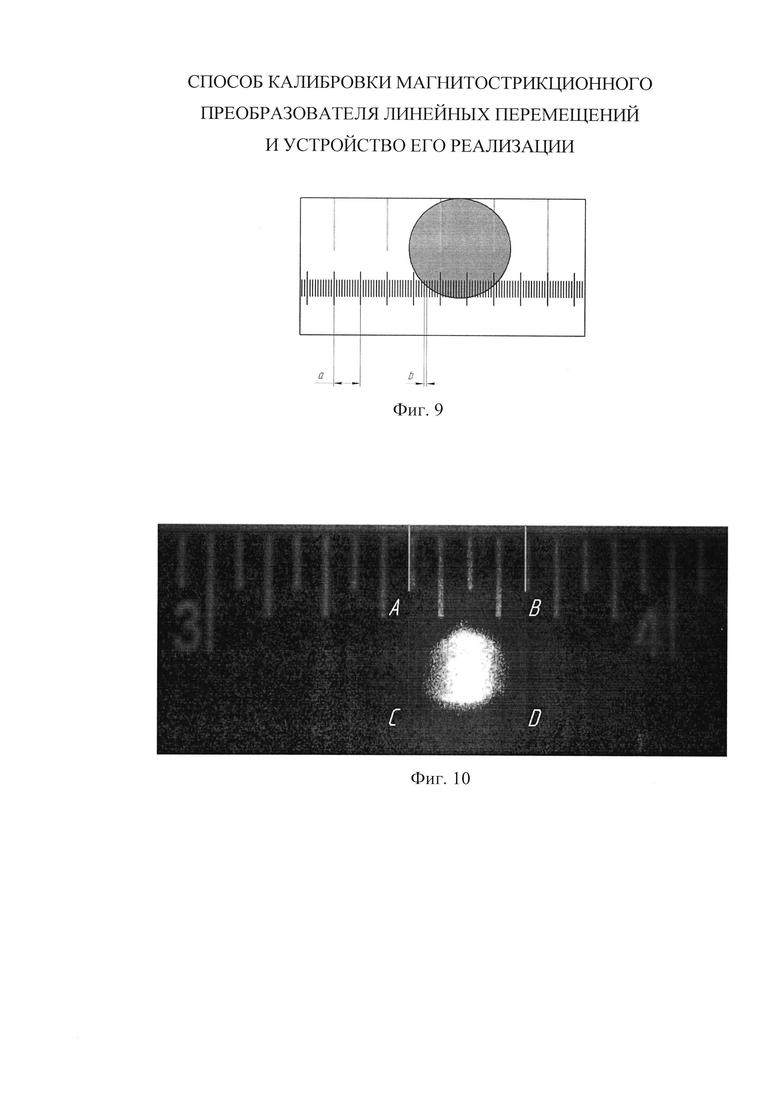
Сущность изобретения поясняется чертежами. На фиг. 1 представлена структурная схема способа калибровки магнитострикционного преобразователя перемещений. На фиг. 2 изображена схема устройства. На фиг. 3 представлена эталонная шкала. На фиг. 4 представлена эталонная шкала с лазерной меткой в первом положении. На фиг. 5 представлен участок в районе лазерной метки в первом положении. На фиг. 6 представлен участок в районе лазерной метки во втором положении. На фиг. 7 представлена эталонная шкала с лазерной меткой во втором положении. На фиг. 8 представлена эталонная шкала с нанесенным на нее цифровой шкалой с шагом а. На фиг. 9 представлен участок в районе лазерной метки с дополнительной нанесенной цифровой шкалой b. На фиг. 10 представлен снимок лазерной метки, сделанный цифровым микроскопом.
Структурная часть содержит: магнитострикционный преобразователь 1 (фиг. 1), лазерный излучатель 2, эталонную шкалу 3, цифровой микроскоп 4, карту памяти 5, персональный компьютер 6.
Устройство для реализации способа содержит: магнитострикционный преобразователь линейных перемещений 1 (фиг. 2), лазерный луч 7, постоянный магнит, лазерный излучатель 2, траектория перемещения постоянного магнита с жестко закрепленным на нем лазерным излучателем 8, жестко прикрепленный к объекту измерения 9, эталонную шкалу 3, лазерные метки на эталонной шкале в первом и втором положениях 10 и 11 соответственно и цифровой микроскоп (схематично не представлен).
Источником информации являются снимки эталонной шкалы и расположенной на ней лазерной метки (фиг. 3, 4, 5, 6, 7, 8, 9, 10).
Данная система калибровки работает следующим образом. На подвижный элемент магнитострикционного преобразователя линейных перемещений 1 устанавливают указатель, например лазерный излучатель 2. Указатель крепят на подвижный элемент магнитострикционного преобразователя линейных перемещений 1, а напротив указателя устанавливают эталонную шкалу 3. Для регистрации перемещений используют цифровой микроскоп 4. Снимки перемещения передают на персональный компьютер 6, на котором установлена система определения линейного перемещения. В системе снимки подвергают обработке.
Пример конкретной реализации способа.
Обработка осуществляют по следующей последовательности операций:
1. Делают 5 снимков: всей шкалы измерения (фиг. 3), всей шкалы измерения с меткой в положении 1 (фиг. 4), участка в районе метки в положении 1 (фиг. 5), всей шкалы измерения в районе метки в положении 2 (фиг. 7), участка в районе метки в положении 2 (фиг. 6).
2. Полученные снимки загружают в ПК и обрабатывают с помощью системы обработки видеоизображения.
3. На первом снимке (фиг. 3) устанавливают границы эталонной шкалы и присваивают значения длины эталонной шкалы, что позволит установить масштабный коэффициент (КM):
где ХРеал - значение длины эталонной шкалы,
 - расчетная длина изображения (количество пикселей),
- расчетная длина изображения (количество пикселей),
NB - количество пикселей по вертикали изображения,
NГ - количество пикселей по горизонтали изображения.
4. На первый и второй снимок (фиг. 3 и 7 соответственно) накладывают основную шкалу с шагом а, таким образом, чтобы заданная шкала совпадала со шкалой на снимке:

где L - длина всей шкалы,
n - количество делений на основной шкале (фиг. 8).
5. Производят определение метки на основной шкале (если метка находится на границе деления шкалы, то считают, что она не охватывает следующее деление шкалы).
6. Определяют расстояние, соответствующее сумме целых шагов а на основной шкале:
где nх - это количество делений шкалы на участке, на который не попадает метка (фиг. 4),
и участок, на который необходимо нанести дополнительную шкалу:
где nу=у+2 - количество делений дополнительной шкалы, которые пересекает метка с учетом двух крайних делений, которые метка не пересекает,
у - количество делений основной шкалы, которые пересекает метка.
7. На снимке участка в первом положении дополнительно накладывают шкалу с меньшим шагом деления b (фиг. 9):

где m - это количество делений дополнительной шкалы внутри диапазона а. Значение m выбирают таким образом, чтобы центр метки попадал на деление дополнительной шкалы b (фиг. 9).
8. Производят определение положения лазерной метки на дополнительной шкале. Для этого вычисляют координаты центра яркости метки. Границей участка являются ближайшие деления шкалы слева и справа от метки (АС и BD, соответственно) по оси X, а ось Y находится равноудалено от делений (АВ и CD) (фиг. 10). Производят построение матрицы яркости метки (с 256 градациями яркости), в соответствии с рисунком, по которой определяют центр яркости метки.
Координаты центра яркости метки определяют по формулам -
где
где M - суммарная яркость пятна,
Mx - суммарная яркость по оси х,
My - суммарная яркость по оси y,
ω(х, у) - матричная функция значения яркости в точке
М(х; у) - значение яркости метки в отдельном пикселе,
С(хс; ус) - центр яркости метки.
9. Определяют расстояние, соответствующее сумме целых делений b на дополнительной шкале:
где mх - это количество делений шкалы на отрезке ly. Это позволит точнее определить координаты в первом положении. Аналогичные действия выполняют для снимка во втором положении (фиг. 7).
10. Определяют координату положения метки в положении 1:
11. По аналогичной последовательности операций (п. 6-10) определяют координату метки в положении 2.
12. Высчитывают перемещение метки из положения 1 в положение 2:
В программу калибровки магнитострикционного преобразователя перемещений (МПП) вводят показания объекта калибровки, и программа вычисляет величину отклонения показаний (%).
Необходимо произвести минимум 2 измерения, так как есть вероятность несовпадения начала отсчета шкалы объекта калибровки с началом отсчета эталонной шкалы.
Следует отметить, что точность измерения калибровочной системы зависит от разрешающей способности микроскопа.
Расчет требуемых параметров системы калибровки осуществляют по следующим формулам:

где Rpaзp - разрешающая способность системы калибровки МПП;
КT - количество точек измерения,
Rшк - разрешение матрицы цифрового микроскопа в линейной плоскости,
Rx - количество пикселей по оси х,
Ry - количество пикселей по оси у,
 - количество пикселей по диагонали матрицы цифрового микроскопа (для увеличения диапазона измерения без изменения положения цифрового микроскопа),
- количество пикселей по диагонали матрицы цифрового микроскопа (для увеличения диапазона измерения без изменения положения цифрового микроскопа),
Lизм - фактическая длина объекта, захваченного объективом цифрового микроскопа.
Разрешение цифрового микроскопа: Rразр.циф=Rх×Rу,
где Rx - количество пикселей по оси х;
Ry - количество пикселей по оси у;
 - количество пикселей по диагонали матрицы цифрового микроскопа (для увеличения диапазона измерения без изменения положения цифрового микроскопа).
- количество пикселей по диагонали матрицы цифрового микроскопа (для увеличения диапазона измерения без изменения положения цифрового микроскопа).
Из формулы (5) следует:
Итак, заявляемое изобретение позволяет повысить точность калибровки магнитострикционных преобразователей линейных перемещений и упросить конструкцию калибровочного устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ЛИНЕЙНОГО ПЕРЕМЕЩЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2391626C1 |
| УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЯ И СКОРОСТИ ДВИЖЕНИЯ | 2004 |
|
RU2271515C1 |
| СПОСОБ ИЗМЕРЕНИЯ ЛИНЕЙНОГО ПЕРЕМЕЩЕНИЯ | 2008 |
|
RU2374608C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДЕЙСТВИТЕЛЬНОГО ЗНАЧЕНИЯ ДЛИНЫ ВОЛНЫ ЛАЗЕРНОГО ИЗЛУЧЕНИЯ | 1994 |
|
RU2083962C1 |
| Стенд для компарирования нивелирных реек | 2021 |
|
RU2805599C2 |
| УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 2005 |
|
RU2318186C2 |
| УЛЬТРАЗВУКОВОЙ УРОВНЕМЕР | 2006 |
|
RU2310174C1 |
| МАГНИТОСТРИКЦИОННЫЙ ДВУХКООРДИНАТНЫЙ НАКЛОНОМЕР | 2008 |
|
RU2389975C2 |
| УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 2005 |
|
RU2299401C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПЛОЩАДИ ПАТОЛОГИЧЕСКИХ АНАТОМИЧЕСКИХ ОБРАЗОВАНИЙ КОСТНЫХ ТКАНЕЙ ПО РЕНТГЕНОВСКИМ СНИМКАМ | 2011 |
|
RU2488350C2 |
Изобретение относится к измерительной технике и может быть применено в системах измерения линейного перемещения в заявленном устройстве и способе, реализующем указанное устройство. Сущность изобретения заключается в том, что проводят калибровку, при которой перемещают лазерный излучатель, жестко соединенный с подвижным элементом магнитострикционного преобразователя линейных перемещений. При этом лазерный излучатель проецирует метку на эталонную шкалу, расположенную параллельно магнитострикционному преобразователю линейного перемещения. Положение метки на эталонной шкале регистрируют цифровым микроскопом. После этого рассчитывают расстояние от начала координат эталонной шкалы до центра лазерной метки. Для этого цифровым микроскопом делают не менее 5 снимков (всей шкалы измерения, всей шкалы измерения с меткой в первом положении, участка в районе метки в первом положении, всей шкалы измерения в районе метки во втором положении и участка в районе метки во втором положении). Полученные снимки загружают в персональный компьютер. Далее на эти снимки накладывают цифровые шкалы, после чего производят расчет параметров линейных перемещений. Технический результат - повышение точности измерения линейного перемещения за счет коррекции составляющей погрешности, вызванной аппаратной задержкой. 2 н.п. ф-лы, 10 ил.
1. Способ калибровки магнитострикционного преобразователя линейных перемещений, по которому рассчитывают расстояние от начала координат эталонной шкалы до центра лазерной метки, для этого делают не менее пяти снимков: всей шкалы измерения, всей шкалы измерения с меткой в первом положении, участка в районе метки в первом положении, всей шкалы измерения в районе метки во втором положении и участка в районе метки во втором положении, и полученные снимки загружают в персональный компьютер и обрабатывают с помощью системы обработки видеоизображения, затем на первом снимке устанавливают границы эталонной шкалы и присваивают значения длины эталонной шкалы, по которым определяют масштабный коэффициент (КМ):
где ХРеал - значение длины эталонной шкалы,
NВ - количество пикселей по вертикали изображения,
NГ - количество пикселей по горизонтали изображения,
на первый и второй снимки накладывают основную шкалу с шагом а таким образом, чтобы деления шкалы совпадали с делениями шкалы на снимке:
 ,
,
где L - длина всей шкалы,
n - количество делений на основной шкале,
после чего производят определение метки на основной шкале, если метка находится на границе деления шкалы, то считают, что она не охватывает следующее деление шкалы, и определяют расстояние, соответствующее сумме целых шагов а на основной шкале по формуле:
lх1=a×(nх-1),
где nХ - количество делении шкалы на участке, на который не попадает метка,
длину участка, на который необходимо нанести дополнительную шкалу:
ly=a×(nу-1),
где nу=у+2 - количество делений дополнительной шкалы, которые пересекает метка с учетом двух крайних делений, которые метка не пересекает,
у - количество делений основной шкалы, которые пересекает метка,
на снимке участка в первом положении дополнительно накладывают шкалу с меньшим шагом деления b:
 ,
,
где m - это количество делений дополнительной шкалы внутри диапазона a, при этом значение m выбирают таким образом, чтобы центр метки попадал на деление дополнительной шкалы b, далее производят определение положения лазерной метки на дополнительной шкале путем вычисления координаты центра яркости метки:
 ,
,
 ,
,
где
 ,
,
 ,
,
 ,
,
где M - суммарная яркость пятна,
Mx - суммарная яркость по оси х,
My - суммарная яркость по оси у,
ω(x, y) - матричная функция значения яркости в точке,
M(x; y) - значение яркости метки в отдельном пикселе,
C(xc; yc) - центр яркости метки,
после этого определяют расстояние, соответствующее сумме целых делений b на дополнительной шкале:
lx2=b×mx,
где mx - это количество делений шкалы на отрезке ly,
аналогичные действия выполняют для снимка во втором положении, координата положения метки в первом положении вычисляется как:
x1=lx1+lx2,
далее последовательность операций повторяют для определения координаты метки во втором положении:
x2=lx3+lx4,
далее вычисляют перемещение метки из первого положения во второе положение:
Δx=x2-x1.
2. Устройство для калибровки магнитострикционных преобразователей линейного перемещения, содержащее эталонную шкалу, расположенную параллельно магнитострикционному преобразователю линейного перемещения, цифровой микроскоп, персональный компьютер, лазерный излучатель, жестко соединенный с подвижной частью магнитострикционного преобразователя линейных перемещений.
| МАГНИТОСТРИКЦИОННЫЙ ДАТЧИК ПЕРЕМЕЩЕНИЙ | 2007 |
|
RU2343645C2 |
| МАГНИТОСТРИКЦИОННЫЙ ДАТЧИК ПЕРЕМЕЩЕНИЙ | 2010 |
|
RU2452918C2 |
| Преобразователь линейных перемещений | 1985 |
|
SU1394033A1 |
| US 20090021244 A1, 21.01.2009. | |||

