Предлагаемое изобретение относится к радиолокации, в частности к имитаторам сигнала цели, и может быть использовано как для имитации сигналов целей, находящихся на фиксированном направлении, так и в составе комплекса, имитирующего многоцелевую по дальности, доплеровской частоте и углу сцену для исследования процессов поиска, обнаружения и сопровождения цели (целей).
Известен имитатор радиолокационного портрета реальной цели [1], в котором сигнал радиолокационной станции (РЛС), принятый приемной антенной имитатора, усиливается, задерживается в многоотводной сверхвысокочастотной (СВЧ) линии задержки в расчетном диапазоне дальностей. Задержанные сигналы модулируются по амплитуде, сдвигаются на имитируемые доплеровские частоты, складываются, излучаются передающей антенной имитатора в качестве имитируемого сигнала (сигналов) цели.
Недостатком устройства является относительно низкая достоверность имитации сигнала цели за счет отсутствия согласования уровня сигнала, поступающего с приемной антенны имитатора, с динамическим диапазоном последовательно соединенных усилителя и устройства задержки, при этом при сканировании сцены антенной РЛС в имитаторе возможны искажения имитируемого сигнала. Кроме того, весьма сложна и трудоемка подготовка и проведение испытаний каждой РЛС, связанные с необходимостью высокоточной аттестации диаграммы направленности антенны (ДНА) проверяемой РЛС, углового положения имитируемой цели относительно осей РЛС, вычисления текущих углов между направлением ДНА и направлением на имитируемую цель, по которым с учетом аттестации ДНА вычисляется уровень сигнала РЛС на входе приемной антенны имитатора, необходимое затухание сигнала в имитаторе на расчетной задержке сигнала цели для каждого положения ДНА проверяемой РЛС, после чего определяется и устанавливается затухание сигнала на входе передающей антенны имитатора.
Наиболее близким по технической сущности к заявляемому имитатору цели является имитатор [2], принятый в качестве прототипа. В этом имитаторе сигнал РЛС принимается приемной антенной имитатора, смещается на промежуточную частоту, задерживается по времени на расчетную величину, сдвигается по частоте на расчетный доплеровский сдвиг, регулируется по амплитуде в соответствии с дальностью от РЛС до имитируемой цели и имитатора, эффективной площадью рассеяния цели и угла между направлением на имитируемую цель и направлением визирования РЛС, переносится на несущую и излучается передающей антенной имитатора. Задержка сигнала на промежуточной частоте производится цифровым способом с помощью устройства цифровой радиочастотной памяти.
Недостатком устройства [2], как и устройства [1], является относительно низкая достоверность имитации сигнала цели за счет отсутствия согласования уровня сигнала, поступающего на смеситель от приемной антенны, с динамическим диапазоном последовательно соединенных смесителя и схемы цифровой радиочастотной памяти, при этом при сканировании цены антенной РЛС в имитаторе возможны искажения имитируемого сигнала, связанные с перегрузкой приемника. Так же весьма сложна и трудоемка по аналогичным причинам подготовка и проведение испытаний каждой РЛС.
Целью предлагаемого изобретения является повышение достоверности имитации сигнала цели при сканировании сцены проверяемой РЛС при одновременном снижении сложности подготовки и проведения испытаний за счет автоматического согласования уровня сигнала, смещаемого на промежуточную частоту, с динамическим диапазоном схемы цифровой радиочастотной памяти, в дальнейшем называемой схемой цифровой задержки сигнала, ввода фиксированного затухания задержанного на промежуточной частоте сигнала в соответствии с разницей расчетного затухания сигнала в имитаторе и уровня затухания, вводимого между приемной антенной имитатора и смесителем для согласования сигнала с динамическим диапазоном схемы цифровой задержки сигнала.
Поставленная цель реализуется тем, что в имитатор, содержащий антенну, последовательно соединенные первый аттенюатор, первый смеситель, схему цифровой задержки сигнала, второй аттенюатор, второй смеситель, третий вентиль, последовательно соединенные синтезатор частоты, делитель мощности, первый и второй выходы которых через первый и второй вентили соединены с вторыми (гетеродинными) входами первого и второго смесителей соответственно, вычислитель, первый, второй и третий выходы которого соединены с вторыми (управляющими) входами первого и второго аттенюатора и схемы цифровой задержки сигнала, генератор такта, соединенный с третьим входом схемы цифровой задержки, второй вход-выход вычислителя является интерфейсным входом-выходом имитатора, по которому в него вводятся расчетные данные параметров имитируемого сигнала цели о задержке, доплеровском сдвиге и затухании сигнала в имитаторе, отличающийся тем, что в него введены антенный переключатель, третий вход-выход которого соединен с входом-выходом антенны, последовательно соединенные детектор, аналого-цифровой преобразователь, выход которого соединен с первым входом вычислителя, выход третьего вентиля соединен с вторым входом антенного переключателя, первый выход которого соединен с первым входом первого аттенюатора, выход первого аттенюатора соединен с входом детектора, четвертый выход вычислителя соединен с входом синтезатора частоты.
Сущность изобретения поясняется дальнейшим описанием и чертежами имитатора сигнала цели:
На фиг.1 изображена структура предлагаемого имитатора,
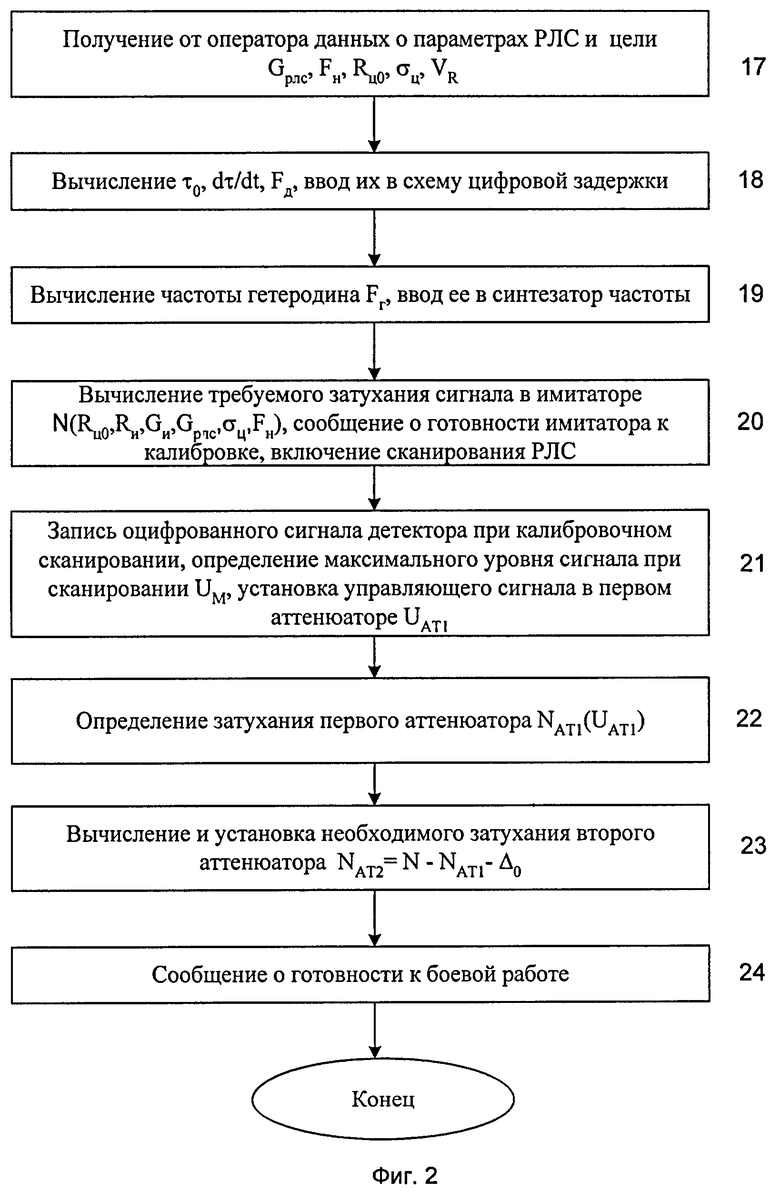
На фиг.2 изображен алгоритм настройки имитатора перед испытаниями РЛС.
На фиг.1 приняты следующие обозначения:
1 - Антенна (АУ);
2 - Антенный переключатель (АП);
3 - Первый аттенюатор (Ат1);
4 - Первый смеситель (СМ!);
5 - Схема цифровой задержки сигнала (ЦЗС);
6 - Детектор (Д);
7 - Первый вентиль (В1);
8 - Генератор тактовых импульсов (ГТ);
9 - Аналого-цифровой преобразователь (АЦП);
10 - Второй вентиль (В2);
11 - Делитель мощности (ДМ);
12 - Синтезатор частоты (СЧ);
13 - Третий вентиль (В3);
14 - Второй смеситель(СМ2);
15 - Второй аттенюатор (Ат2);
16 - Вычислитель (ВУ).
На фиг.1 антенна 1 через последовательно соединенные антенный переключатель 2, первый аттенюатор 3, первый смеситель 4, схему цифровой задержки сигнала 5, второй аттенюатор 15, второй смеситель 14, третий вентиль 13, соединенный с вторым входом антенного переключателя 2, синтезатор частоты 12 через последовательно соединенные делитель мощности 11 и второй вентиль 10 соединен с вторым (гетеродинным) входом второго смесителя 14, выход первого аттенюатора 3 через последовательно соединенные детектор 6 и АЦП 9 соединен с первым входом вычислителя 16, первый, второй, третий и четвертый выходы которого соединены с вторыми (управляющими) входами первого 3 и второго 15 аттенюаторов, схемы цифровой задержки сигнала 5 и входом синтезатора частоты 12 соответственно, первый выход делителя мощности 11 через первый вентиль 7 соединен с вторым входом первого смесителя 4, генератор такта 8 соединен с третьим входом схемы цифровой задержки 5, второй вход-выход вычислителя 16 является интерфейсным входом-выходом имитатора, по которому в него вводятся расчетные данные параметров имитируемого сигнала цели о задержке, доплеровском сдвиге и затухании сигнала в имитаторе.
В качестве схемы цифровой задержки 5 может быть использован модуль 1879ВМ3 разработки ОАО «Модуль», либо построен по схеме [1, с 171 рис 6.21]. В качестве управляемых аттенюаторов 3 и 15 может быть использован аттенюатор AD 6630 фирмы Analog Device. В качестве вычислителя 16 может быть использована персональная ЭВМ типа Pentium, дополненная элементами сопряжения с управляемыми элементами. Остальные элементы, в том числе синтезатор частот 12, широко используются в радиолокации и не требуют пояснений по реализации.
Имитатор цели, изображенный на фиг.1, работает в трех последовательных режимах: 1) прием исходной информации о параметрах РЛС и цели, предварительная настройка имитатора, 2) калибровка уровня имитируемого сигнала, 3) боевая работа.
Во всех режимах инициация работы производится оператором с помощью команд и исходных данных, приходящих на второй вход-выход вычислителя 16. Работа имитатора в первых двух режимах происходит в соответствии с алгоритмом, приведенным на фиг.2. На имитатор вводятся следующие входные данные: коэффициент усиления антенны РЛС Gрлс, дальность до имитируемой цели Rц0, ее радиальная скорость Vr, несущая частота РЛС Fн и эффективная площадь рассеяния имитируемой цели σц (поз.17 фиг.2). Известными паспортизованными данными являются: дальность от проверяемой РЛС до имитатора Rи, затухание сигнала в схеме цифровой задержки Δ0, усиление приемо-передающей антенны имитатора Gи. Вычислитель 16 в первом режиме по полученным и известный данным вычисляет: 1) начальную задержку сигнала схемы цифровой задержки τ0, скорость ее изменения dτ/dt, доплеровский сдвиг сигнала fд и вводит результаты расчета в схему цифровой задержки 5 через ее второй вход (поз.18 фиг.2), 2) частоту гетеродинного сигнала Fг и ввод ее в синтезатор частоты 12 (поз.19 фиг.2), что обеспечивает перенос сигнала РЛС, принимаемого имитатором, на рабочую частоту схемы цифровой задержки 5, 3) требуемое затухание сигнала N(Rц, Rи, Gи, Gрлс, σц, Fн) в имитаторе и через второй вход-выход передает сообщение оператору о готовности к второму режиму (калибровке уровня имитируемого сигнала), при этом включается сканирование антенны проверяемой РЛС (поз.20 фиг.2). Принимаемый антенной 1 сигнал РЛС через последовательно соединенный антенный переключатель 2 и первый аттенюатор 3 поступает на детектор 6, где детектируется, далее оцифровывается аналого-цифровым преобразователем 9 и поступает в вычислитель 16, где записывается и на каждом интервале сканирования, находится его максимальное значение UМ. По результатам каждого сканирования вычислитель 16 определяет ΔU=UМ-Uo - отклонение максимального значения UМ от верхнего допустимого значения сигнала Uo на входе схемы цифровой задержки 5. Значение ΔU используется для пошагового уточнения сигнала управления первым аттенюатором 3, при котором  становится меньше порога (поз.21 фиг.2). На этом заканчивается регулировка затухания первого аттенюатора 3, запоминается сигнал управления UAT1 и находится по таблице соответствующее ему затухание NAT1 (поз.22 фиг.2). Далее вычислителем 16 рассчитывается необходимое затухание сигнала на входе второго смесителя
становится меньше порога (поз.21 фиг.2). На этом заканчивается регулировка затухания первого аттенюатора 3, запоминается сигнал управления UAT1 и находится по таблице соответствующее ему затухание NAT1 (поз.22 фиг.2). Далее вычислителем 16 рассчитывается необходимое затухание сигнала на входе второго смесителя
NAT2=N(Rц, Rи, Gи, Gрлс, σц, Fн)-Δ0-NAT1, дБ.
Значение NAT2 вводится вычислителем 16 на второй (управляющий) вход второго аттенюатора 15 и запоминается (поз.23 фиг.2). Вычислитель 16 сообщает оператору об окончании калибровки и готовности к боевой работе (поз.24 фиг.2). С приходом на второй вход-выход вычислителя 16 команды о начале боевой работы вычислитель 16 по третьему выходу разрешает работу схемы цифровой задержки 5 с установленными ранее исходными данными по задержке сигнала τ0, скорости движения dτ/dt и доплеровском сдвиге fд. Дискрет задержки выходного сигнала схемы цифровой задержки определяется периодом сигнала, приходящего на ее третий вход от генератора такта 8.
Боевая работа имитатора происходит следующим образом. Сигнал проверяемой РЛС принимается антенной 1, поступает через антенный переключатель 2 на первый аттенюатор 3, где ослабляется на выставленную при калибровке величину NAT1, дБ. Далее принятый сигнал с помощью первого смесителя 4 и гетеродинного сигнала, приходящего с синтезатора частоты 12 через делитель мощности 11 и первый вентиль 7 на второй вход первого смесителя 4, переносится на рабочую частоту схемы цифровой задержки 5. Сигнал с выхода первого смесителя 4 задерживается схемой цифровой задержки 5 и через второй аттенюатор 15 поступает на первый вход второго смесителя 14. Ранее во время калибровки в аттенюаторе 15 выставлено затухание сигнала NAT2. Второй смеситель 14 переносит задержанный сигнал на несущую частоту с помощью гетеродинного сигнала, поступающего на второй вход второго смесителя 14 с делителя мощности 11 через второй вентиль 10. Выходной сигнал второго смесителя 14 через последовательно соединенные третий вентиль 13 и антенный переключатель 2 поступает на антенну 1, излучается и является выходным сигналом имитатора радиолокационной цели.
В процессе работы вследствие имитации движения цели меняется ее дальность относительно РЛС, соответственно, требуемое затухание сигнала во втором аттенюаторе 15 NAT2(N, NAT1, Δ0). Необходимые расчеты и уточнение настройки второго аттенюатора 15 производятся вычислителем 16 в течение всей боевой работы до получения внешней команды об окончании боевой работы на втором входе-выходе вычислителя 16.
Техническим преимуществом предлагаемого имитатора радиолокационной цели перед прототипом является повышение достоверности имитации сигнала цели при сканировании сцены проверяемой РЛС при одновременном снижении сложности подготовки и проведения испытаний за счет автоматического согласования уровня принятого от РЛС сигнала, смещаемого на промежуточную частоту, с динамическим диапазоном схемы цифровой задержки и отсутствие необходимости перестраивать затухание сигнала в имитаторе при изменениях положения ДНА РЛС во всем рабочем диапазоне сканирования, снижении временных затрат на подготовку рабочего места при сменах проверяемой РЛС.
Пользуясь сведениями, представленными в материалах заявки, имитатор радиолокационной цели может быть изготовлен по существующей, известной в радиопромышленности технологии, на базе известных комплектующих изделий и использован при проверках РЛС при стендовых испытаниях.
Источники информации
1. Ю.М.Перунов и др. Радиоэлектронное подавление информационных каналов систем управления оружием. М.: Радиотехника, 2003 г. (с.135 рис.5.2, с.171 рис.6.21).
2. Патент США 5892479 от 6.4.1999 г. Electromagnetic target generator.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ИМИТАЦИИ РАДИОЛОКАЦИОННОГО СИГНАЛА МОНОИМПУЛЬСНОЙ РЛС | 2008 |
|
RU2391682C1 |
| Имитатор радиолокационных целей | 2021 |
|
RU2787576C1 |
| СИСТЕМА ВСТРОЕННОГО КОНТРОЛЯ И КАЛИБРОВКИ МОНОИМПУЛЬСНОЙ РЛС | 2011 |
|
RU2459219C1 |
| ИМИТАТОР СИГНАЛА РАДИОЛОКАТОРА С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ | 2012 |
|
RU2522502C1 |
| ИМИТАТОР ЛОЖНОЙ РАДИОЛОКАЦИОННОЙ ЦЕЛИ ПРИ ЗОНДИРОВАНИИ СИГНАЛАМИ С ЛИНЕЙНОЙ ЧАСТОТНОЙ МОДУЛЯЦИЕЙ | 2011 |
|
RU2486540C1 |
| УСТРОЙСТВО ДЛЯ ИМИТАЦИИ ЛОЖНОЙ РАДИОЛОКАЦИОННОЙ ЦЕЛИ ПРИ ЗОНДИРОВАНИИ СИГНАЛАМИ С ЛИНЕЙНОЙ ЧАСТОТНОЙ МОДУЛЯЦИЕЙ | 2016 |
|
RU2625567C1 |
| ИМИТАТОР РАДИОЛОКАЦИОННОЙ ЦЕЛИ | 2018 |
|
RU2676469C1 |
| ИМИТАТОР РАДИОЛОКАЦИОННОЙ ЦЕЛИ ПРИ ЗОНДИРОВАНИИ ПРЕИМУЩЕСТВЕННО ДЛИТЕЛЬНЫМИ СИГНАЛАМИ | 2011 |
|
RU2504799C2 |
| ИМИТАТОР РАДИОЛОКАЦИОННОЙ ЦЕЛИ ПРИ ЗОНДИРОВАНИИ ПРЕИМУЩЕСТВЕННО ДЛИТЕЛЬНЫМИ СИГНАЛАМИ | 2014 |
|
RU2568899C2 |
| РАДИОЛОКАЦИОННЫЙ ИМИТАТОР ЦЕЛИ | 2007 |
|
RU2358279C1 |
Изобретение относится к радиолокации, в частности к имитаторам радиолокационного сигнала цели, и может быть использовано в составе комплекса, имитирующего многоцелевую сцену по дальности, доплеровской частоте и углу для исследования процессов поиска, обнаружения и сопровождения цели (целей). Достигаемый технический результат - повышение достоверности имитации сигнала цели при сканировании сцены проверяемой РЛС при одновременном снижении сложности подготовки и проведения испытаний. Указанный результат достигается за счет того, что перед боевой работой проводится калибровка имитатора, при которой принятый от сканирующей РЛС сигнал, перед преобразованием на промежуточную частоту и задержкой на промежуточной частоте, ослабляется первым аттенюатором на соответствующую величину, обеспечивающую установку максимума сигнала на входе схемы цифровой задержки равным максимально допустимому значению, а перед обратным преобразованием задержанного сигнала на несущую ослабляется вторым аттенюатором на величину, равную разнице между затуханием сигнала в радиолинии РЛС-цель, и суммой затухания сигнала в первом аттенюаторе и постоянных потерь в имитаторе. Для установки затухания первого аттенюатора при калибровке проводится детектирование выходного сигнала первого аттенюатора, его оцифровка, определение рассогласования максимума оцифрованного сигнала на каждом цикле сканирования от допустимого, по которому вычислитель регулирует затухание сигнала в первом аттенюаторе в сторону уменьшения рассогласования, пока рассогласование не станет меньше допуска. 2 ил.
Имитатор радиолокационной цели, содержащий антенну, последовательно соединенные первый аттенюатор, первый смеситель, схему цифровой задержки сигнала, второй аттенюатор, второй смеситель, третий вентиль, последовательно соединенные синтезатор частоты, делитель мощности, первый и второй выходы которых через первый и второй вентили соединены с вторыми входами первого и второго смесителей соответственно и являющимися гетеродинными, вычислитель, первый и второй выходы которого соединены с вторыми входами первого и второго аттенюаторов, являющимися управляющими, третий выход вычислителя соединен с вторым входом схемы цифровой задержки сигнала, являющимся управляющим, по которому вводятся данные о задержке сигнала, его скорости и доплеровском сдвиге, генератор такта, соединенный с третьим входом схемы цифровой задержки, отличающийся тем, что в него введены антенный переключатель, третий вход-выход которого соединен с входом-выходом антенны, последовательно соединенные детектор, аналого-цифровой преобразователь (АЦП), выход которого соединен с первым входом вычислителя, выход третьего вентиля соединен с вторым входом антенного переключателя, первый выход которого соединен с первым входом первого аттенюатора, выход первого аттенюатора соединен с входом детектора, четвертый выход вычислителя соединен с входом синтезатора частоты, который является управляющим, второй вход-выход вычислителя является интерфейсным входом-выходом имитатора, по которому производится управление имитатором и вводятся данные о параметрах проверяемой РЛС и имитируемой цели, используемые вычислителем для вычисления и ввода в схему цифровой задержки требуемой задержки сигнала, скорости ее изменения и доплеровского сдвига, вычисления и ввода в синтезатор требуемой настройки частоты гетеродинного сигнала для обеспечения переноса сигнала радиолокационной станции, принимаемого имитатором, на рабочую частоту схемы цифровой задержки, в режиме калибровки вычислитель на каждом цикле сканирования определяет отклонение максимума сигнала, оцифрованного АЦП, от верхнего допустимого значения, по которому формирует и запоминает на время боевой работы сигнал управления первым аттенюатором, уменьшающим отклонение до величины, меньшей порога.
| US 5892479 А, 06.04.1999 | |||
| ИМИТАТОР ПОДВИЖНОЙ РАДИОЛОКАЦИОННОЙ ЦЕЛИ | 2007 |
|
RU2337376C1 |
| ИМИТАТОР РАДИОЛОКАЦИОННОЙ ЦЕЛИ | 2006 |
|
RU2317563C1 |
| СПОСОБ ИМИТАЦИИ ЦЕЛИ И ЕЕ ИМИТАТОР В ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ (ВАРИАНТЫ) | 2002 |
|
RU2234107C1 |
| EP 1960807 A1, 14.10.2003 | |||
| US 6633251 B1, 14.10.2003 | |||
| KR 20070116984 A, 11.12.2007. | |||

