Изобретение относится к области швартовки судов с использованием спутниковой навигационной системы.
Известна система автоматического управления движением судна (патент RU №2245914, март 2005 г. [1]), в которой реализован способ швартовки судна, основанный на использовании сигналов от приемника спутниковой навигационной системы, датчиков кормовых, носовых рулей и датчика оборотов гребного винта. Формирование законов управления рулевыми приводами кормовых и носовых рулей осуществляют с использованием сигнала текущего и заданного курса (для кормовых рулей) и сигналов расстояния до пирса и угла дрейфа (для формирования управления носовыми рулями или подруливающими механизмами. При достижении судном заданного заранее расстояния до пирса изменяют закон управления рулевым приводом, обеспечивая поддержание заданного (ограниченного) значения угла дрейфа. Недостатками известной системы автоматического управления движением судна [1] при швартовке являются:
- использование только части исполнительных средств для управления движением судна, судоводитель перестраивает скорость хода судна, вплоть до знака, что требует, в свою очередь, перехода на чисто ручное управление,
- невозможность обеспечения автоматического управления движением судна в режиме швартовки (известные способы автоматического управления движением судна являются в действительности полуавтоматическими, т.к. требуют непрерывного участия судоводителя в управлении),
- второй этап швартовки не обеспечивает выход судна в заданную центральную точку швартовки на пирсе.
Известен также способ швартовки судна с использованием спутниковой навигационной системы (патент RU №2330789 С1, 10.08.2008 [2]).
В известном способе для швартовки судна [2] с использованием приемника спутниковой навигационной системы (СНС), рулевого привода, носового подруливающего устройства, датчика руля, датчика тяги, блока программного управления, датчика угловой скорости и вычислителя, в который вводят из приемника СНС сигналы координат судна, скорости хода судна, производной скорости хода судна и путевого угла, из датчика руля - сигнал угла руля, из датчика угловой скорости - сигнал угловой скорости и из датчика тяги-сигнал тяги, дополнительно используют радары и регулятор оборотов гребного винта, вводят в блок программного управления сигналы координат центральной точки швартовки судна и длину вектора путевого угла в точке начала второго этапа швартовки, по сигналам координат судна и сигналам координат центральной точки швартовки судна в вычислителе формируют сигналы заданного путевого угла и длины вектора путевого угла, сигнал длины вектора путевого угла вводят в блок программного управления, где формируют в зависимости от длины вектора путевого угла сигналы программной скорости хода судна, программного курса и разности сигналов длины вектора путевого угла и длины вектора путевого угла точки начала второго этапа швартовки, сравнивают эти сигналы, и если разность сигналов положительна, в вычислителе формируют три сигнала управления первого этапа швартовки. В известном способе [2] отмеченные выше недостатки системы [1] устраняются благодаря:
- отключению штатного управления движением судна при выходе судна в заданную точку А0 (в момент времени начала режима швартовки - t0);
- формированию двух этапов режима швартовки судна от точки А0 до точки Б и от точки Б (начало второго этапа режима швартовки) до центральной точки швартовки судна - Аконеч., находящейся на пирсе.
С использованием:
- вычислителя,
- блока программного управления,
- носовых подруливающих устройств,
- регулятора оборотов гребного винта,
- носовых и кормовых радаров, размещенных в носу судна и на корме,
- информации о фазовом состоянии судна от приемника спутниковой навигационной системы и задания координат точки швартовки судна Аконеч. и точки Б (формируемой по достижению длины вектора заданного путевого угла фиксированному значению), -приближения величины текущего путевого угла к заданному программному значению путевого угла с помощью носового подруливающего устройства на первом этапе швартовки до т. Б и с использованием подсистемы управления оборотами гребного винта на втором этапе швартовки от т.Б до т. Аконеч. (вблизи т. Аконеч.),
- управления носовым подруливающим устройством на втором этапе швартовки от т. Б до т. Аконеч. с использованием сигналов расстояний от судна до пирса, получаемых от носового и кормового радаров,
- управления углом курса по программе в функции от длины вектора заданного путевого угла с помощью рулевого привода на первом этапе швартовки, а на втором этапе с помощью того же рулевого привода, но с корректировкой знака угла отклонения руля в зависимости от знака сигнала скорости хода судна,
- управления скоростью хода судна по программе, вырабатываемой в блоке программного управления в функции от длины вектора путевого угла.
Однако анализ статистических эксплуатационных данных аппаратуры спутниковой навигации при реальной эксплуатации, показал, что ее точностные характеристики носят случайный колебательный характер в зависимости от срока эксплуатации, времени года, условий плавания, географического местоположения и ряда других факторов. Следовательно, можно сделать вывод, что при реальной эксплуатации спутниковая аппаратура нуждается в повышении точностных характеристик и их периодическом контроле. Поэтому задача контроля точностных характеристик в процессе реальной эксплуатации является одной из важнейших задач для всех специалистов, занимающихся как вопросами проектирования и создания, так и применения спутниковой аппаратуры в процессе судовождения на морских судоходных путях. Анализ современной спутниковой навигационной аппаратуры ГЛОНАСС/GPS показывает, что ее можно разделить на две основные группы (Справочник капитана / Под. ред. Дмитриева В.И. СПб.: Элмор, 2009. 816 с. [3]): спутниковую геодезическую аппаратуру (СГА), работающую в дифференциальном и относительном режимах с использованием как кодовых, так и фазовых измерений, обеспечивающую высокоточные определения приращений координат между точками установки антенн приемников; спутниковую навигационную аппаратуру (СНА), предназначенную для определения местоположения, вектора скорости и направления движения потребителя (судна) в глобальной системе координат и работающую в кодовом режиме. Согласно ст.13 Закона РФ "Об обеспечении единства измерений" СГА и СНА являются средствами измерений, а их создание и применение -объект государственного регулирования. Эти средства измерений должны подвергаться государственному метрологическому контролю и надзору, который включает (Адерихин И.В., Кищенко С.С., Сальников А.И. Способ контроля точностных характеристик судовых приемоиндикаторов спутниковой навигации при эксплуатации // Транспортная безопасность и технологии. 2006. №2. С. 61-62 [4]): проведение испытаний с целью утверждения типа аппаратуры как средства измерений (СИ) в соответствии с ГОСТ РВ 8.560-95 (Государственная система обеспечения единства измерений. Средства измерений военного назначения. Испытания и утверждение типа. М.: Госстандарт России, 1994. 28 с. [5]); периодическую поверку как СИ в процессе его использования; лицензирование деятельности юридических и физических лиц по изготовлению и ремонту СИ; контроль над выпуском, состоянием и применением этих СИ. В настоящее время создан и эксплуатируется комплекс сертифицированных средств измерений, который обеспечивает достоверную проверку точностных характеристик СНА и СГА при проведении испытаний и сертификации (Кривов А.С., Донченко СИ., Денисенко О.В. Комплекс эталонов и средств измерений для испытаний аппаратуры потребителей космических навигационных систем ГЛОНАСС/GPS // Информост.2004. №1 (31). С.46-47 [6]). В частности, комплекс используется при проведении Государственных приемочных испытаний различных образцов СНА и СГА. Следует отметить, что комплекс, безусловно, не может претендовать на "универсальность" применения при проведении испытаний различных образцов СНА и СГА и контроля их точности при эксплуатации, так как его использование ограничено следующими факторами: возможность проверки только на стенде, а не в процессе эксплуатации; наличие в одной организации в единственном экземпляре [6]. В связи с существующими ограничениями в применении данного комплекса возникает проблема контроля точностных характеристик спутниковой аппаратуры в процессе реальной эксплуатации. В качестве возможных путей решения этой задачи предлагаются несколько различных способов контроля точности спутниковой аппаратуры при реальной эксплуатации, рассмотренных далее. Как известно из метрологии (Технико - эксплуатационные требования на лазерную систему швартовки крупнотоннажных судов. - МФ - 02 - 22/848 - 64, 2002 [7]), чтобы провести оценку точности какого-либо измерительного прибора необходимо его точностные характеристики сравнить с эталоном, у которого, как правило, точностные характеристики значительно выше, чем у оцениваемого прибора. Чтобы контролировать точностные характеристики спутниковой аппаратуры при реальной эксплуатации следует иметь такой эталон определения положения судна, который был бы заведомо точнее оцениваемого. Таким эталоном может быть система на основе лазерного локатора (ЛЛ) (Аснис Л.Н., Васильев В.П., Волконский В.Б. Лазерная дальнометрия. М.: Радио и связь, 1995. 256 с. [8], [7]) и оптических уголковых отражателей (ОУО), которая позволит решить задачу контроля точностных характеристик спутниковых приемоиндикаторов при реальной эксплуатации(Адерихин И.В., Сальников А.И. Использование спутниковой связи и навигации в системах дальней идентификации и контроля местоположения судов. Тезисы доклада. Материалы XXIX НПК ППС МГАВТ. Μ.: МГАВТ, 2007. С. 4-5 [9], Адерихин И.В., Сальников А.И. Методика контроля точностных характеристик судовых приемоиндикаторов спутниковой навигации при эксплуатации. Тезисы доклада. Материалы XXVIII НПК ППС МГАВТ. М.: МГАВТ, 2006. С. 5-6 [10], Адерихин И.В., Сальников А.И. Способ контроля точности судовых приемоиндикаторов спутниковой навигации при реальной эксплуатации. Сборник научных трудов "Повышение эффективности судопропуска, судовых технических и радионавигационных систем и безопасности плавания". М.: Альтаир-МГАВТ, 2008. С. 3-5 [11], Адерихин И.В., Сальников А.И. Способ контроля точностных характеристик судовых спутниковых компасов и пути его реализации при эксплуатации. Тезисы доклада. Материалы XXXI НПК ППС МГАВТ. М.: МГАВТ, 2009. С.23-24 [12], Отчет о НИР "Способы повышения и контроля точностных характеристик судовой аппаратуры радионавигационной системы при эксплуатации". Рук. темы д.т.н., проф. Адерихин И.В., ответств. исполн. Сальников А.И. Госрегистрация №01201061485. М.: МГАВТ, 2010. 118 с. [13]). Задачей предлагаемого технического решения является повышении точности швартовки с использованием спутниковой навигационной системы.
Поставленная задача решается за счет того, что в способе швартовки судна с использованием приемника спутниковой навигационной системы (СНС), рулевого привода, носового подруливающего устройства, датчика руля, датчика тяги, блока программного управления, датчика угловой скорости и вычислителя, в который вводят из приемника СНС сигналы координат судна, скорости хода судна, производной скорости хода судна и путевого угла, из датчика руля - сигнал угла руля, из датчика угловой скорости - сигнал угловой скорости и из датчика тяги-сигнал тяги, дополнительно используют радары и регулятор оборотов гребного винта, вводят в блок программного управления сигналы координат центральной точки швартовки судна и длину вектора путевого угла в точке начала второго этапа швартовки, по сигналам координат судна и сигналам координат центральной точки швартовки судна в вычислителе формируют сигналы заданного путевого угла и длины вектора путевого угла, сигнал длины вектора путевого угла вводят в блок программного управления, где формируют в зависимости от длины вектора путевого угла сигналы программной скорости хода судна, программного курса и разности сигналов длины вектора путевого угла и длины вектора путевого угла точки начала второго этапа швартовки, сравнивают эти сигналы, и если разность сигналов положительна, в вычислителе формируют три сигнала управления первого этапа швартовки, при равенстве нулю или отрицательном значении разности этих сигналов в вычислителе формируют три сигнала управления второго этапа швартовки, формирование в вычислителе трех сигналов управления первого этапа швартовки осуществляют следующим образом: первый сигнал управления рулевым приводом в виде алгебраической суммы сигналов угла курса, угловой скорости, угла руля и программного курса, выработанного в блоке программного управления, подают на вход рулевого привода, второй сигнал управления носовым подруливающим устройством в виде алгебраической суммы сигналов путевого угла, заданного путевого угла, производной путевого угла и тяги подают на вход носового подруливающего устройства, третий сигнал управления регулятором оборотов гребного винта в виде алгебраической суммы сигналов скорости хода судна, ее производной и программной скорости хода судна, выработанной в блоке программного управления, подают на вход регулятора оборотов гребного винта, формирование в вычислителе трех сигналов управления второго этапа швартовки осуществляют следующим образом: сигнал управления рулевым приводом в виде алгебраической суммы сигналов угла курса и программного курса, сформированного в блоке программного управления, подают на вход рулевого привода, причем знак сигнала, подаваемого на вход рулевого привода, изменяют на обратный при заднем ходе судна, сигнал управления носовым подруливающим устройством в виде алгебраической суммы сигналов расстояний до пирса от носового и кормового радара и производной от разности этих сигналов подают на вход носового подруливающего устройства, сигнал управления регулятором оборотов гребного винта формируют либо в виде алгебраической суммы сигналов скорости хода судна и ее производной и программной скорости хода судна, выработанной в блоке программного управления, который затем подают на вход регулятора оборотов гребного винта, если сигнал длины вектора путевого угла больше заданной уставки, либо, если сигнал заданной длины вектора путевого угла меньше уставки, то сигнал управления регулятором оборотов гребного винта формируют в виде алгебраической суммы путевого угла и заданного путевого угла, который затем подают на вход регулятора оборотов гребного винта, в отличие от прототипа, посредством радаров измеряют расстояние и/или пеленг и/или курс, по крайней мере, до трех оптических угловых отражателей, установленных на причальном основании с известными координатами, рассчитывают координаты точки установки радара на судне с последующим их преобразованием в географическую систему координат, вычисляют координаты точки установки антенны приемника СНС, вычисляют эталонные координаты точки установки антенны приемника СНС, вычисляют погрешности расстояний, пеленга и курса, вычисляют поправки, которые вводят в вычислитель, при этом также вводят в вычислитель данные о расположении ОУО и антенны СПИ (a1, b1, h1, a2, b2, h2, a3, b3, h3), координаты и курс судна (Хс, Yc, Zc, K), углов крена и дифферента (θ, ψ), а также расстояний (D1, D2, D3), измеренных радаром до ОУО, и его координат (Хл, Υл, Ζл), и последующим расчетом эталонных координат антенны СПИ (ϕэ,λэ, hэ), которые сравниваются с вычисленными координатами СПИ (ϕс, λс, hс) с использованием информационных сигналов от НКА. Полученные поправки (Δϕ=ϕc-ϕэ; Δλ=λс-λэ; λ=hc-hэ) также позволят контролировать точностные характеристики СПИ СН при реальной эксплуатации При этом устройство для реализации способа по п. 1, включающее приемник спутниковой навигационной системы (СНС), рулевой привод, носовое подруливающее устройство, датчик руля, датчик тяги, блок программного управления, датчик угловой скорости и вычислитель, в который вводят из приемника СНС сигналы координат судна, скорости хода судна, производной скорости хода судна и путевого угла, дополнительно содержит блок синхронизации, выход которого соединен с синхронизирующим входом процессора и радара, судовую и береговую АИС, береговые оптические угловые отражатели аппаратура, состоит из т ОУО (не менее трех), установленных на берегу вблизи судоходного пути на расстоянии R в точках с известными координатами.
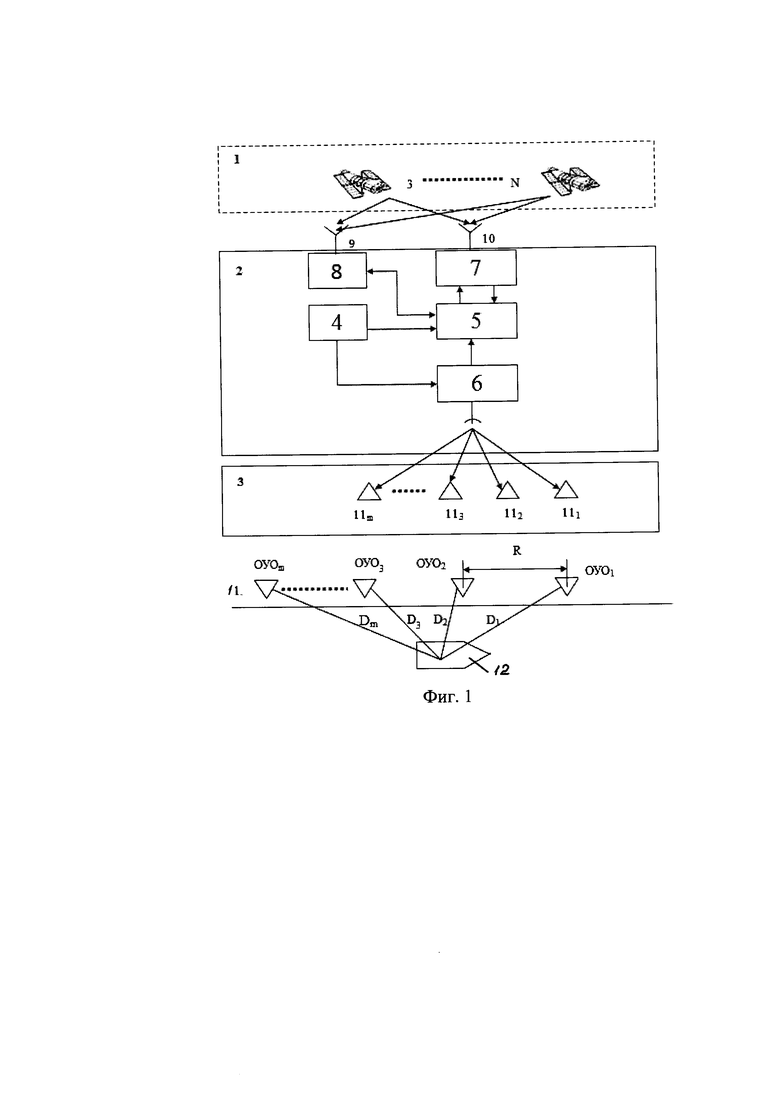
Сущность предлагаемого технического решения поясняется чертежами. Фиг. 1. Блок - схема устройства включает НКА ГЛОНАСС/GPS 1, и состоит из аппаратуры потребителя (АП) 2 и береговой аппаратуры 3. АП содержит блок синхронизации 4, выход которого соединен с синхронизирующим входом процессора 5 и радар 6. В состав АП входят ССК 8 с антенной 9, а также СПИ СН 7 с антенной 10, точностные характеристики которого оцениваются. Его информационный вход и информационный выход соединены соответственно с информационным выходом и информационным входом процессора 5. Береговая аппаратура 3, состоит из т ОУО 11 (не менее трех), установленных на берегу вблизи судоходного пути на расстоянии R в точках с известными координатами. Для расширения рабочей зоны системы можно увеличить число ОУО 11 (m>3). Позиция 12 - судно
Фиг. 2. Взаимное расположение антенны СПИ и радара (лазерного локатора (ЛЛ)).
Фиг. 3. Перемещение антенны спутникового приемоиндикатора (СПИ) при крене.
Фиг. 4. Перемещение антенны СПИ при дифференте.
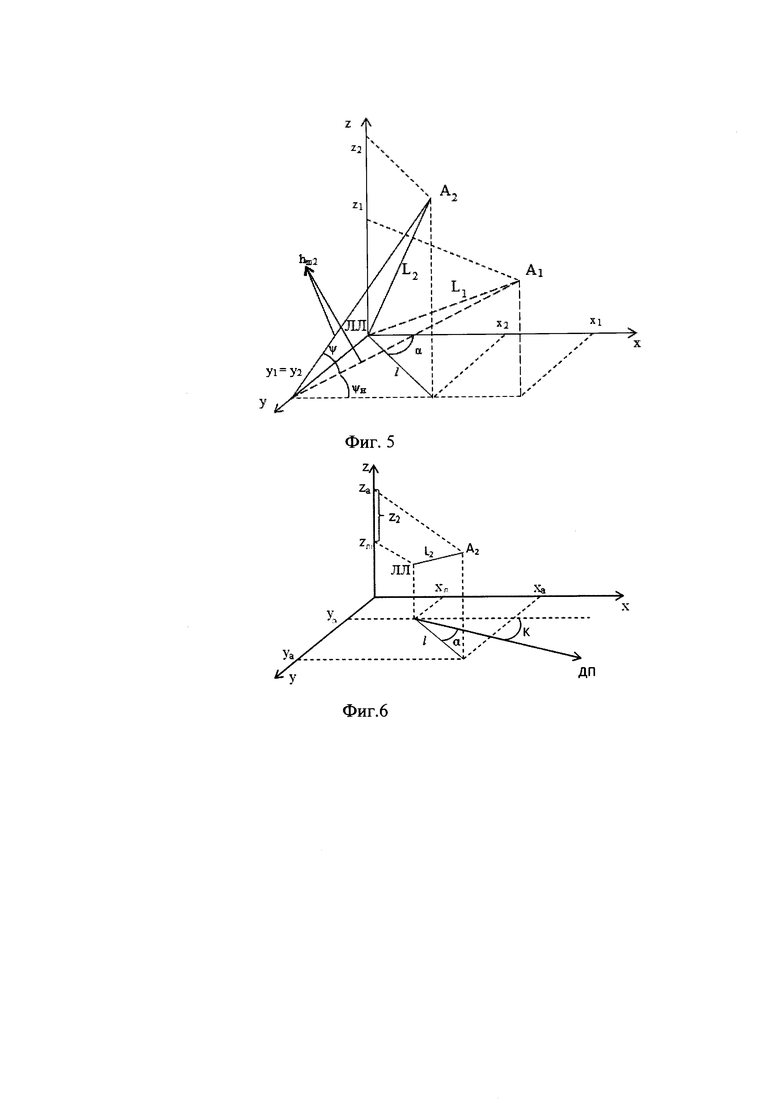
Фиг. 5. Перемещение антенны СПИ при появлении дифферента при наличии крена.
Фиг. 6. Взаимное расположение лазерного локатора и антенны СПИ.
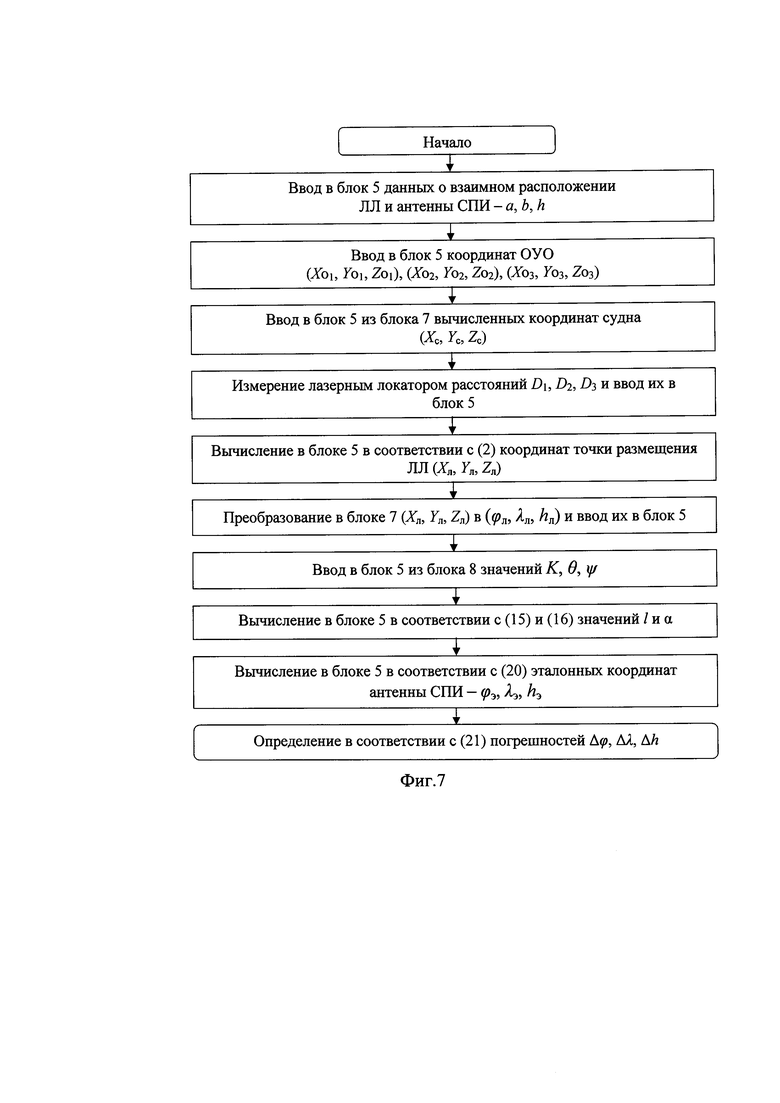
Фиг. 7. Алгоритм функционирования вычислительного блока 5.
Фиг. 8. Структурная схема системы контроля точности судовой аппаратуры спутниковой навигации при размещении лазерного локатора на берегу. Структурная схема включает НКА ГЛОНАСС/GPS 1, и состоит из аппаратуры потребителя (АП) 2 и береговой аппаратуры 3. АП содержит процессор 5 и радар 6. В состав АП входят ССК 8 с антенной 9, а также СПИ СН 7 с антенной 10, точностные характеристики которого оцениваются. Его информационный вход и информационный выход соединены соответственно с информационным выходом и информационным входом процессора 5. Схема также содержит волоконно-оптическую решетку 13, преобразователь 14, береговую АИС 15 с антенной 16, ОУО 11, процессор 17, судовую АИС 18 с антенной 19.
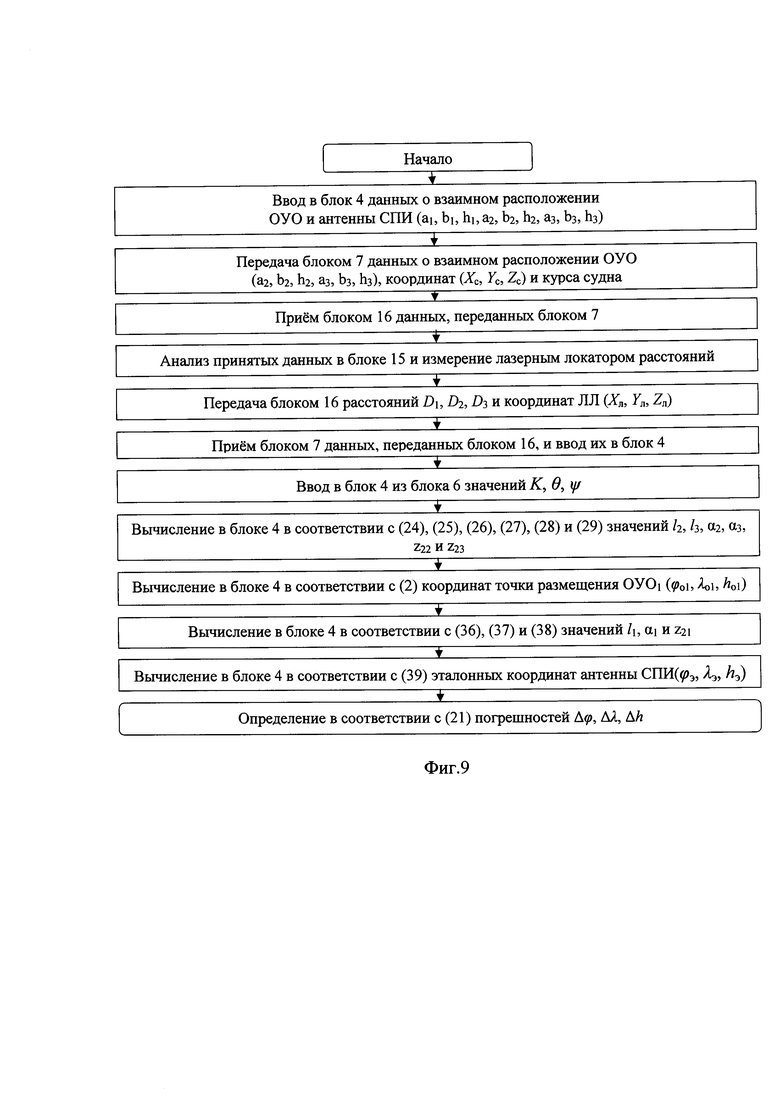
Фиг. 9. Алгоритм функционирования системы контроля точности судовой аппаратуры спутниковой навигации при размещении лазерного локатора на берегу.
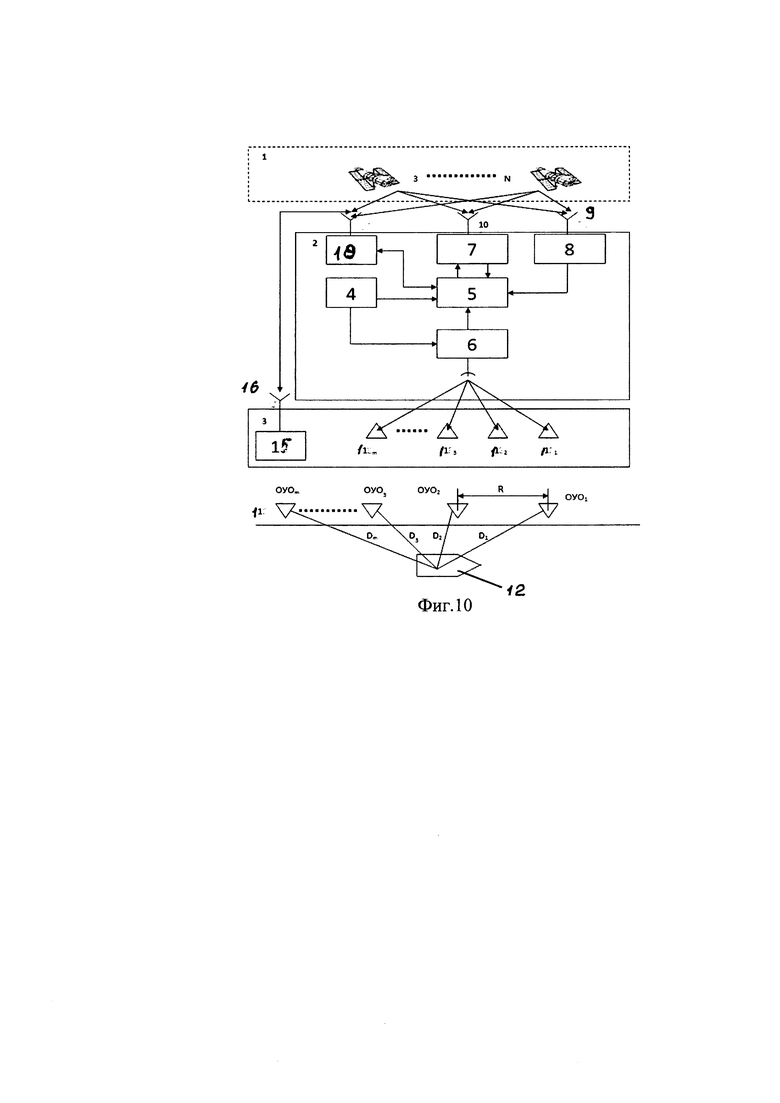
Фиг. 10. Структурная схема системы контроля точности судовых спутниковых комплексов при размещении лазерного локатора на судне. Структурная схема включает НКА ГЛОНАСС/GPS 1, и состоит из аппаратуры потребителя (АП) 2 и береговой аппаратуры 3. АП содержит блок синхронизации 4, выход которого соединен с синхронизирующим входом процессора 5 и радар 6. В состав АП входят ССК 8 с антенной 9, а также СПИ СН 7 с антенной 10, судовая АИС 18 с антенной 19, ОУО 11, береговая АИС 15 с антенной 16.
Судовые электромеханические средства швартовки, как и в прототипе, включают рулевой привод, носовое подруливающее устройство, датчик руля, блок программного управления, соединенный с процессором 5, датчик угловой скорости, датчик оборотов, датчик тяги, регулятор оборотов гребного винта. А также может включать кормовые подруливающие устройства.
Предлагаемый способ может быть реализован системой, которая использует информацию от НКА ГЛОНАСС/GPS 1, и состоит из аппаратуры потребителя (АП) 2 и береговой аппаратуры 3 (фиг.1) [6]. АП содержит блок синхронизации 4, выход которого соединен с синхронизирующим входом процессора 5 и радара 6. В состав АП входят ССК 8 с антенной 9, а также СПИ СН 7 с антенной 10, точностные характеристики которого оцениваются. Его информационный вход и информационный выход соединены соответственно с информационным выходом и информационным входом процессора 5. Береговая аппаратура 3, состоит из т ОУО 11 (не менее трех), установленных на берегу вблизи судоходного пути на расстоянии R в точках с известными координатами [6,15]. Для расширения рабочей зоны системы можно увеличить число ОУО 11 (m>3). Расстояние между ОУО (Ri) должно быть как можно больше, так как с точки зрения навигации([7], Куршин В. В. Математическое и программное обеспечение навигации с использованием систем ГЛОНАСС/GPS/WAAS. Диссертация на соискание ученой степени д.т.н. М., 2003. 339 с. [16]), чем больше угол между ориентирами, тем точнее будет измерение. Блок синхронизации 4, процессор 5, ССК 8, СПИ СН 7 и их антенны 9 и 10 используются из состава выпускаемых серийной СА СН ГЛОНАСС и GPS (Gyrocompass Yokogawa CMZ700S (проспект). Yokogawa, 2007 [17], Magellan GPS Satellite Navigation NAV-1200 (проспект). MSC, 1995 [18], The Mariner's Handbook. NP100. Ninth Edition. UKHO, 2009 [19]). Система, реализующая оценивание точностных характеристик С А СН, работает следующим образом. АП 2 антенной 10 принимает радиосигналы СН, излученные НКА, определяет навигационные параметры (ПД до НКА) и по известному алгоритму (Глобальная навигационная спутниковая радионавигационная система ГЛОНАСС / под ред. Харисова В.Н., Перова А.И., Болдина В.А. - Изд. 4-е, исправ. М.: Радиотехника, 2010. 800 с. [20], Сикарев И.А. Функционально устойчивые автоматизированные идентификационные системы для мониторинга и управления движением судов на речном транспорте (Диссертации на соискание ученой степени д.т.н. СПб., 2010. 234 с. [21], Фарватер РК -2306 (проспект). Радио Комплекс, 2009. 4 с. [22]) вычисляет координаты судна (Хс, Yc, Zc), в основе которого лежит система уравнений:

где Хi, Υi и Zi - координаты i-го НКА. Определение координат судна (Хc, Yc,Zc) осуществляется по рабочим алгоритмам С А СН в стандартном режиме [21]. При подходе судна к зоне действия береговой аппаратуры 3 в процессор 5 вводят высокоточные координаты ОУО, 11  С выхода приемника 7 координаты судна (Хс, Yc,Zc) поступают на информационный вход процессора 5. Сигналы блока синхронизации 4 запускают ЛЛ 6, который измеряет расстояния D1, D2,D3. По измеренным с помощью ЛЛ 6 расстояниям D1, D2 и D3 и координатам ОУО, в процессоре 5 вычисляются координаты точки размещения ЛЛ (Χл,Υл,Ζл) по следующему алгоритму. Составляется система уравнений в геоцентрической системе координат (Кожухов В.П., Жухлин A.M., Кондрашихин В.Т. и др. Математические основы судовождения. М.: Транспорт, 1993. 200 с. [23]):
С выхода приемника 7 координаты судна (Хс, Yc,Zc) поступают на информационный вход процессора 5. Сигналы блока синхронизации 4 запускают ЛЛ 6, который измеряет расстояния D1, D2,D3. По измеренным с помощью ЛЛ 6 расстояниям D1, D2 и D3 и координатам ОУО, в процессоре 5 вычисляются координаты точки размещения ЛЛ (Χл,Υл,Ζл) по следующему алгоритму. Составляется система уравнений в геоцентрической системе координат (Кожухов В.П., Жухлин A.M., Кондрашихин В.Т. и др. Математические основы судовождения. М.: Транспорт, 1993. 200 с. [23]):

Решая систему уравнений (2), находим неизвестные координаты ЛЛ в геоцентрической системе координат (Хл, Yл, Zл). Далее происходит сравнение вычисленных координат ЛЛ (Хл, Yл, Zл) с координатами СПИ (Хс, Yc, Zc), рассчитанными с использованием сигналов НКА по соответствующим алгоритмам [20, 21, 22]. Однако при этом следует учесть геометрические расхождения точек расположения антенн ЛЛ и СПИ с тем, чтобы получить достоверную разницу координат. Для подобного учета можно использовать геометрические соотношения, представленные ниже.
Учитывая, что СПИ выдает информацию о широте ϕ и долготе λ на свой или удаленный дисплеи для удобства пользователя (судоводителя), следует также проверить точностные характеристики СПИ и в этой системе координат.Для этого вычисленные координаты ЛЛ (Хл, Υл, Ζл) поступают на вход приемника сигналов СН, где по заложенному в него алгоритму преобразуются в географическую систему координат - ϕл, λл, hл [20]. Для решения поставленной задачи контроля точностных характеристик СПИ СН необходимо по найденным координатам ЛЛ вычислить эталонные координаты точки размещения антенны СПИ 10. Зная взаимное расположение ЛЛ и антенны 10 (a, b, h) в системе координат, связанной с судном, как показано на фиг.2, требуется найти координаты антенны 10 (точка А) в географической системе координат, которые будут зависеть от курса судна, его крена и дифферента. Для этого воспользуемся следующим алгоритмом.
Введем вспомогательную прямоугольную систему координат, показанную на фиг.3, плоскость XY которой параллельна плоскости истинного горизонта, ось X параллельна ДП судна и начало координат находится в точке расположения ЛЛ. Положение точки А в данной системе координат будет характеризоваться положением вектора L, проекции которого на оси координат оХ, oY и oZ в начальный момент равны соответственно a, b и k. При появлении крена θ антенна СПИ в данной системе координат переместится из точки А в точку А1. Введем следующие обозначения:

Примем угол θ положительным при крене на правый борт, величину а положительной при расположении антенны СПИ в нос судна от ЛЛ, величину b положительной при расположении антенны СПИ в сторону правого борта от ЛЛ и величину h положительной при расположении антенны СПИ выше ЛЛ.
Проекции вектора L1 на оси оХ, oY и oZ с учетом формул привидения (Выгодский М. Я. Справочник по элементарной математике. М.: Астрель, 2006. 509 с. [24]) будут соответственно равны:

После подстановки выражений (3) в (4) они будут иметь следующий вид:

При появлении дифферента ψ антенна СПИ в данной системе координат переместится из точки А в точку (фиг.4). Введем следующие обозначения:
(фиг.4). Введем следующие обозначения:

Примем угол ψ положительным при дифференте на корму, величины a,b и h положительными при расположении антенны СПИ относительно ЛЛ так, как было указано выше.
Проекции вектора L1' на оси оХ, о Υ и oZ с учетом формул привидения [24] будут соответственно равны:

После подстановки выражений (6) в выражения (7) они примут вид:

Для совместного учета крена и дифферента рассмотрим ситуацию появления дифферента при условии, что судно уже имеет крен. При появлении дифферента ψ антенна СПИ в данной системе координат переместится из точки Α1 в точку А2 (фиг.5). Введем обозначения по аналогии с выражением (6):

Проекции вектора L2 на оси оХ, oY и oZ с учетом формул привидения [24] будут соответственно равны:

После подстановки выражений (9) в (10) они будут иметь вид:

После подстановки выражений (5) в выражения (11) они примут вид:

Проекция вектора L2 на плоскость ΧΥ, т.е. на плоскость истинного горизонта будет равна:
где α - угол между осью оХ, т.е. между ДП и проекцией  который равен:
который равен:

После подстановки выражений (12) в выражения (13) и (14) они будут иметь вид:


Перейдем от предложенной системы координат к прямоугольной системе координат, представленной на фиг.6, плоскость XY в которой также параллельна плоскости истинного горизонта, ось X направлена на географический север, а начало координат не находится в точке расположения ЛЛ.
Обозначим координаты ЛЛ в данной системе как Хл, Yл, Zn, тогда координаты антенны приемоиндикатора (Ха, Ya, Za) будут определяться выражением:

где K - курс судна.
Далее необходимо перейти от прямоугольной системы координат к географической. Как известно из навигации [25], длина одной минуты дуги меридиана земного эллипсоида:

где α - большая полуось эллипсоида, е - его эксцентриситет, ϕ - географическая широта данной точки. Длина одной минуты параллели земного эллипсоида:

Зная координаты размещения ЛЛ (ϕл, λл, hл) в географической системе координат, найдем эталонные координаты точки размещения антенны СПИ - ϕэ, λэ, hэ:

Значения эксцентриситета и полуосей эллипсоида выбираются в зависимости от используемой в приемнике геодезической системы (П3-90.02 для ГЛОНАСС или WGS-84 для GPS) [26,27].
Таким образом, после преобразования в СПИ геоцентрических координат точки размещения ЛЛ в географические по формуле (2), они поступают в процессор 5 (фиг.1) вместе с данными об ориентации судна от ССК (K, θ, ψ). Также в процессоре имеются данные о взаимном расположении ЛЛ и антенны 10 (а, b, h). По изложенному выше алгоритму, представленному на фиг.7, в процессоре вычисляются эталонные координаты точки размещения антенны СПИ (ϕэ, λэ, hэ). Эти координаты сравниваются с координатами судна ϕc, λс, hc, полученными по радиосигналам НКА, и определяются погрешности:

Для оценки точности нахождения координат СПИ воспользуемся формулой (Лесков М.М., Баранов Ю.К., Гаврюк М.И. Навигация. Изд. 2-е., перераб. и доп.М.: Транспорт, 1986. 360 с. [25]):

где М- среднеквадратическая погрешность, D - дисперсия, хi - результаты отдельных наблюдений, m(х) - математическое ожидание, n - число наблюдений. Найденные в соответствии с алгоритмом (фиг.8) эталонные координаты СПИ (ϕэ, λэ, hэ) есть не что иное, как математическое ожидание величин ϕc, λс, hс. Поэтому формулы для расчета среднеквадратических погрешностей обсервованных координат, характеризующих случайные погрешности определения местоположения судна по СПИ СН, запишутся в следующем виде (Лентарев А.А. Морские районы систем обеспечения безопасности мореплавания. Владивосток: Мор. гос. ун-т, 2004. 114 с. [28]):

СКП обсервации будет находиться по формуле (7). Для оценивания точности СА СН, работающей в дифференциальном режиме, этот способ также легко реализуем. Для этого необходимо, чтобы СА СН получала поправки от дифференциальной подсистемы. Способ, структура и алгоритм функционирования контроля точностных характеристик судовой аппаратуры спутниковой навигации может быть использован, посредством установленного на берегу лазерного локатора.
Данный способ может быть реализован системой, использующей информацию от НКА. Система состоит, как показано на рисунке (фиг.8), из АП 2 и береговой аппаратуры 3. АП содержит процессор 5, СПИ 7, информационный вход и информационный выход которого соединены соответственно с информационным выходом и информационным входом процессора 5. В составе АП имеются ССК 8 и судовая станция АИС 7, соединенные с информационным входом процессора 5. В АП также входят апертурная волоконно-оптическая решетка 13, преобразователь 14, антенна СПИ 10, антенна ССК 9 и антенна АИС 16. Кроме того в АП входят т ОУО 11 (числом не менее трех). Береговая аппаратура 3 состоит из ЛЛ 6, установленного на берегу вблизи судоходного пути в точке с известными координатами, процессора 17, береговой станции АИС 15 и ее антенны 16. Процессор 5, приемник радиосигналов 7, ССК 8, АИС 18 и антенны 9,10,19, используются из состава выпускаемых серийной СА СН ГЛОНАСС и GPS [17, 18,19]. ОУО целесообразно устанавливать таким образом, чтобы они были разнесены по всей длине судна. Это необходимо сделать с таким расчетом, чтобы расстояние между ОУО было максимально возможным, что позволит повысить точность измерений (Дмитриев В.И., Григорян В.Л., Катенин В.А. Навигация и лоция. М.: Моркнига, 2009. 472 с. [29], [25]).
Данная система позволяет оценивать точностные характеристики СА СН при реальной эксплуатации. Она работает следующим образом. АП 2 антенной 10 принимает радиосигналы СН, излученные НКА, определяет навигационные параметры (ПД до НКА) и по рабочим алгоритмам определения местоположения СА СН в стандартном режиме [29] вычисляет координаты судна (Хс, Yc, Zc). В основе алгоритмов лежит система уравнений (1).
В судовую станцию АИС 18 вводится информация о взаимном расположении ОУОг, ОУО3 (а2, b2, h2, a3, b3, h3) и антенны СПИ СН 10 (a1, b1, h1) относительно ОУО1. Также в нее поступает информация о местоположении судна (Хс, Yc, Zc) от приемника СН 7 и данные о его курсе (К) от ССК 8. Данная информация транслируется судовой станцией АИС 18 и принимается береговой АИС 15.
Полученная информация анализируется в процессоре 17, где определяется взаимная ориентация ЛЛ и ОУО, и при нахождении судна в радиусе действия ЛЛ 6 он запускается и измеряет расстояние до ОУОi 13 (D1, D2 и D3).
Измеренные расстояния и координаты ЛЛ (Хл, Υл, Ζл) передаются береговой станцией АИС 18. Они принимаются судовой АИС 18 и поступают на вход процессора 5. Зная взаимное расположение ОУО 11 (а2, b2, h2, а3, b3, h3) на судне, выразим координаты ОУO2 и ОУО3 через координаты ОУО1. Для этого воспользуемся алгоритмом, предложенным в предыдущем пункте. По формуле (15), находим величины 
Далее по формуле (16) находим значения а2 и а3:
По формуле (12) находим значения Z22 и Z23:
Обозначив координаты ОУО[за φ0ΐ, λ0ΐ, h0l по формуле (20), находим координаты ОУO2 (ϕo2, λo2, ho2).

и координаты ОУO3 (ϕo3, λo3, ho3):

Далее полученные географические координаты подлежат преобразованию в геоцентрические с использованием соотношений [231:

где  - эксцентриситет эллипсоида, а - большая полуось эллипсоида, b - малая полуось эллипсоида.
- эксцентриситет эллипсоида, а - большая полуось эллипсоида, b - малая полуось эллипсоида.
Значения эксцентриситета и полуосей эллипсоида выбираются в зависимости от используемой в приемнике геодезической системы (П3-90.02 для ГЛОНАСС или WGS-84 для GPS) (Сборник характерных аварийных случаев на морском транспорте в период 2004-2006 годов. СПб.: ЗАО ЦНИИМФ, 2007. 124 с. [27], Шебшаевич B.C., Григорьев М.Н., Кокина Э.Г. и др. Дифференциальный режим сетевой спутниковой радионавигационной системы // Зарубежная радиоэлектроника. 1989. №1. С.5-33 [28]). Координаты ОУО1 в геоцентрической системе координат:

Координаты ОУO2 в геоцентрической системе координат:


Координаты ОУО3 в геоцентрической системе координат:



По полученным от судовой станции АИС 7 расстояниям (D1, D2, D3) и координатам ЛЛ (Хл, Yл, Zл), а также по полученным от ССК 6 данными об ориентации судна (K, θ, ψ) с учетом координат ОУО 11, рассчитанных по выражениям (33), (34), (35), в процессоре 5 по формуле (2) вычисляются координаты точки размещения ОУО1 - ϕo1, λo1, ho1. По имеющимся данным об ориентации судна (K, θ, ψ) и о взаимном расположении ОУО1 и антенны СПИ 10 (a1, b1, h1) в процессоре 5 по формуле (15) вычисляется величина l1:
Далее по формуле (16) в процессоре 4 вычисляется значение α1:
По формуле (12) в процессоре 5 вычисляется величина z21:
По координатам точки размещения ОУO1, величинам l1,α1, z21 и имеющимся данным об ориентации судна (К, θ, ψ) в процессоре 5 вычисляются эталонные координаты точки размещения антенны СПИ - ϕэ, λэ, hэ:

Эти координаты сравниваются с координатами судна (ϕс, λс, hс), полученными по радиосигналам НКА, и, в соответствии с выражением (21), определяются погрешности, которые используются в процессоре 5 для вычисления координат судна и оценки точности СПИ при реальной эксплуатации.
Найденные в соответствии с алгоритмом (фиг.9) эталонные координаты СПИ (ϕэ, λэ, hэ) есть не что иное, как математическое ожидание (Выгодский М.Я. Справочник по высшей математике. М.: Астрель, 2006. 991 с. [23], [24]) величин (ϕс, λс, hc. Поэтому расчет среднеквадратических погрешностей обсервованных координат, характеризующих случайные погрешности определения местоположения судна по СПИ СН, будет производиться по формулам (23). СКП обсервации будет находиться по формуле (7). Во время измерения расстояния ЛЛ 6 до ОУО 11, оптический луч попадает на апертурную волоконно-оптическую решетку 13. В процессоре 5 вычисляются угол β - угол прихода оптического луча на решетку 13. Наличие зависимости распределения интенсивностей облучения от угла β на выходе фотодетекторов создает токи разной величины. Их величины формируются по закону этого распределения. Аналоговые величины этих токов одновременно преобразуются в блоке 14 в совокупность n величин, которые вводятся в процессор 5, где вычисляется угол β принятого оптического сигнала. Значения этих углов могут быть использованы при определении положения ДП судна. Этот способ также легко реализуем для оценивания точности СА СН, работающей в дифференциальном режиме. Для этого необходимо, чтобы СА СН получала поправки от ДПС. Также возможен другой вариант функционирования данной системы, при котором судовая АИС 18 передает данные о взаимном расположении ОУО 11 и антенны СПИ 10 (a1, b1, h1, а2, b2, h2, а3, b3, h3), координаты (Хс, Yc, Zc) судна и значения К, θ, ψ от ССК 8. При этом все вычисления в соответствии с алгоритмом, изложенным выше, производятся в процессоре 17 на берегу, а затем передаются в сообщении БАИС 15 на судно. Предлагаемый способ может быть также использован для контроля точностных характеристик судовых спутниковых компасов.
При этом предлагаемый способ может быть реализован системой, представленной на фиг.10, которая использует информацию от НКА, и состоит из АП 2 и береговой аппаратуры 3. АП включает в себя блок синхронизации 4, выход которого соединен с синхронизирующим входом процессора 5 и ЛЛ 6. В АП также входят СПИ СН 7, информационный вход и информационный выход которого соединены соответственно с информационным выходом и информационным входом процессора 5, ССК 8 и судовая станция АИС 18, соединенные с информационным входом процессора 5, а также антенна 10 СПИ, антенна 9 ССК и антенна АИС 19. Береговая аппаратура 3 состоит из т ОУО 11 (не менее трех), установленных на берегу вблизи судоходного пути на расстоянии R друг от друга в точках с известными координатами, БАИС 15 и ее антенны 16. Система, реализующая предложенный способ, позволяет оценивать точностные характеристики СК в процессе реальной эксплуатации и работает следующим образом. АП 2 (судна) антенной 10 принимает радиосигналы СН, излученные НКА, определяет навигационные параметры и по известному алгоритму вычисляет курс судна, в основе которого лежит система уравнений (1.3). С выхода ССК 8 курс судна (Кс) поступает на информационный вход процессора 5. Сигналы блока синхронизации 4 запускают ЛЛ 6, который измеряет расстояния D1, D2, D3 и курсовые углы β1, β2 и β3 - углы прихода отраженного от ОУО оптического луча по отношению к ДП судна. По найденным координатам ЛЛ (ϕ л, λ л) и известным координатам i-го ОУО 11 (ϕoi, λoi) находится пеленг с ЛЛ на ОУО [29]:

По измеренному с помощью ЛЛ 6 курсовому углу на i-й ОУО 11 и найденному значению пеленга вычисляется эталонное значение курса судна:

Полученное значение курса (Кэ) сравнивается с курсом судна (Кс), полученным по радиосигналам НКА, и определяется погрешность ССК:

Эта погрешность используется в процессоре 5 для оценки точностных характеристик ССК при реальной эксплуатации.
Другой способ может быть реализован системой, представленной на фиг.10, которая использует информацию от НКА и состоит из АП 2 и береговой аппаратуры 3. АП содержит процессор 5, ПИ СН 7, информационный вход и информационный выход которого соединены соответственно с информационным выходом и информационным входом процессора 5, ССК 8 и судовую станцию АИС 18, соединенные с информационным входом процессора 5. В систему также входят апертурная волоконно-оптическая решетка 13, преобразователь 14, антенна 10 ПИ, антенна 9 ССК и антенна АИС 19. Кроме того, в состав системы входят т ОУО 11 (не менее трех). Береговая аппаратура 3 состоит из установленного на берегу вблизи судоходного пути ЛЛ 6 в точке с известными координатами, процессора 17, БАИС 15 и ее антенны 16. Апертурная волоконно-оптическая решетка 13 устанавливается в плоскости, параллельной ДП судна. Каждое оптическое волокно соединено с одним фотодетектором, выход каждого из которых соединен со входом одного из преобразователей 14, соединенного с параллельными входами процессора 5. Данная система позволяет оценивать точностные характеристики ССК при реальной эксплуатации и работает следующим образом. Во время измерения расстояния ЛЛ 6 до ОУО 11, оптический луч попадает на апертурную волоконно-оптическую решетку 13. В процессоре 5 вычисляются угол β - угол прихода оптического луча на решетку 13. Наличие зависимости распределения интенсивностей облучения от угла β на выходе фотодетекторов создает токи разной величины. Их величины формируются по закону этого распределения. Аналоговые величины этих токов одновременно преобразуются в блоке 14 в совокупность n величин, которые вводятся в процессор 5, где вычисляется угол β принятого оптического сигнала.
По принятым судовой станцией АИС 18 расстояниям (D1, D2 и D3) и координатам ЛЛ 6 (Хл Υл, Ζл), в процессоре 5 по изложенному в предыдущем пункте алгоритму вычисляются координаты ΟΥΟ1 и далее, зная взаимное расположение ОУО1 и волоконно-оптической решетки 8 (а, b, h), по формуле (3.20) вычисляются ее координаты. По координатам ЛЛ 6 (ϕ л, λ л), найденному углу β и координатам решетки 13 (ϕoi, λoi) в процессоре 5 вычисляется пеленг по формуле (3.40), а затем эталонное значение курса (Кэ) судна по формуле (41), которое сравнивается с курсом судна (Кс), полученным по радиосигналам НКА, и определяется погрешность ΔК по формуле (12), которая используется в процессоре 5 для оценки точности ССК в процессе реальной эксплуатации. Работа электромеханических судовых устройств в период выполнения операции швартовки аналогична работе устройств прототипа, т.е. в способе используют рулевой привод, носовое подруливающее устройство и регулятор оборотов гребного винта судна. Режим швартовки выполняется в два этапа с использованием заданной точки Б окончания первого этапа и начала второго. Сигнал момента вхождения судна в точку Б формируют по равенству длины текущего вектора путевого угла заданному значению. Управление курсом осуществляют по программе с использованием рулевого привода. Управление по путевому углу - с использованием носового подруливающего устройства на первом этапе швартовки в соответствии с заданным сигналом путевого угла, который формируют в зависимости от длины вектора заданного путевого угла, а на втором этапе швартовки используют регулятор оборотов гребного винта судна. На первом этапе используют регулятор оборотов гребного винта для управления скоростью хода судна по программе в функции от длины заданного вектора путевого угла. Достигается формирование автоматического управления движением судна в режиме швартовки.
Система швартовки подключается в момент времени to, когда судно достигнет заданную штурманом на карте точку А0 - (начало режима швартовки), при этом штатная система автоматического управления движением судна отключается.
1. Выработка сигнала заданного путевого угла COGзд.i. вектора движения судна из точки Δ0 в точку - Аконеч. с использованием сигналов широт и долгот текущего состояния судна Φi,λi, (в момент времени t0 точка А0).
Сигнал COGзд формируют в вычислителе (процессор 5) с использованием в сигналов текущих значений Φi, λi (место нахождения судна, сигналы поступают из приемника
7 СНС), сигнал центральной точки швартовки судна у пирса - точка Аконеч. (Фконеч., λконеч.) поступает также из вычислителя.
2. Формирование длины вектора Li.
B вычислитель вводят сигналы: Φi=Φ0, λi=λ0 из приемника 7 СНС. Сигнал длины Li вырабатывается постоянно с момента времени t0 в вычислителе через интервалы времени Δt и подают в блок программного управления.
3. В функциональных преобразователях блока программного управления формируются программные сигналы курса - фпрог.и скорости хода судна Vпрог.с использованием сигнала Li. (фпрог.=f1(Li), Vпрог.=f2 (Li). Сигнал условия нахождение судна в области первого или второго этапа швартовки формируют сравнением сигнала Li с введенным заранее в блок программного управления постоянным сигналом Lm длины вектора заданного путевого угла в точке Б.
4. Введение в вычислитель исходных сигналов:
1) из блока программного управления вводят программные сигналы
а) курса судна фпрог=f1 (Li),
б) скорости хода судна Vпрог.=f2 (Li),
в) Аконеч.
г) сигнал условия нахождения судна в области первого или второго этапа швартовки,
2) из приемника 7 СНС поступают сигналы:
а) текущего путевого угла COG,
б) текущих координат судна Φi, λi,
в) текущей скорости хода судна V.
3) Из датчика руля поступает сигнал текущего значения руля.
4) Из датчика угловой скорости поступает сигнал текущей угловой скорости судна ω.
5) Из датчика оборотов поступает сигнал текущих оборотов гребного винта п.
6) Из датчика тяги поступает сигнал текущей тяги - Τ носовых подруливающих устройств.
7) Из радара 6 вводят сигналы Lнос., Lкор. - расстояние от носа и кормы судна до пирса.
Управление судном на первом этапе швартовки.
Формирование сигналов управления рулевым приводом, носовыми подруливающими устройствами и регулятором оборотов гребного винта. Законы управления, вырабатываемые в вычислителе 5:
1) рулевым приводом,
2) носовым подруливающим устройством,
3) регулятором оборотов гребного винта. Поступают соответственно на входы рулевого привода, носового подруливающего устройства, регулятора оборотов гребного винта.
Формирование сигналов управления в вычислителе 5 рулевым приводом, носовыми подруливающими устройствами и регулятором оборотов гребных винтов. На втором этапе режима швартовки при переходе судна из точки Б в точку Аконеч.:
1) управление углом курса φ, носовым подруливающим устройством.
2) управление скоростью хода судна.
3) управление путевым углом COG.
Сигналы d/dt δ, d/dt Τ и d/dt n из вычислителя 5 поступают с момента времени tm через интервалы времени Δt соответственно на входы рулевого привода, носового подруливающего устройства, регулятора оборотов гребного винта. В настоящее время создан и эксплуатируется комплекс средств измерений, который обеспечивает проверку точностных характеристик спутниковой навигационной и геодезической аппаратуры при проведении их испытаний и сертификации. Однако он не может быть применен для контроля точности СА СН при реальной эксплуатации, так как его использование ограничено следующими факторами: возможность проверки С А СН только на стенде, а не на судне в процессе эксплуатации; наличие комплекса только в одной организации в единственном экземпляре.
Поэтому для СА СН возникает задача по обеспечению и контролю ее точностных характеристик при реальной эксплуатации.
Разработанный способ может быть использован для контроля точностных характеристик СПИ СН на основе установленного на борту судна ЛЛ, его структурная реализация и алгоритм функционирования, сущность которого заключается в вычислении координат СПИ (Хс, Yc, Zc) по стандартному алгоритму, измерении ЛЛ расстояний (D1, D2, D3) до ОУО, установленных на берегу, расчете координат точки размещения ЛЛ (Хл, Υл, Ζл), с последующим их преобразованием в географическую систему координат (ϕ л, λ л, hл), нахождении эталонных координат точки размещения антенны СПИ (ϕэ, λэ, hэ) и их сравнении с вычисленными координатами СПИ (ϕс, λс, hc) с использованием информационных сигналов от НКА. Полученные поправки (Δϕ=ϕс - ϕэ; Δλ=λс - λэ; Δh=hc - hэ) позволяют осуществлять контроль точностных характеристик СПИ СН при реальной эксплуатации, что значительно повысит качество навигационного обеспечения безопасности мореплавания. При реализации способа контроля точностных характеристик СПИ СН на основе установленного на берегу ЛЛ, его структурная реализация и алгоритм функционирования, сущность которого заключается в вводе в вычислительный блок данных о расположении ОУО и антенны СПИ (а1, b1, h1, а2, b2, h2, а3, b3, h3), координат и курса судна (Хс, Yc, Zc, К), углов крена и дифферента (θ, ψ), а также расстояний (D1, D2, D3), измеренных ЛЛ до ОУО, и его координат (Хл, Yл, Zл), и последующим расчетом эталонных координат антенны СПИ (ϕэ, λэ, hэ), которые сравниваются с вычисленными координатами СПИ (ϕc, λс, hc) с использованием информационных сигналов от НКА. Полученные поправки (Δϕ=ϕс - ϕэ; *Αλ=λ с - λэ; Δh=hc - hэ) также позволят контролировать точностные характеристики СПИ СН при реальной эксплуатации, что значительно повысит качество навигационного обеспечения безопасности мореплавания. При реализации способа контроля точностных характеристик ССК при реальной эксплуатации на основе расположенного на судне ЛЛ, его структурная реализация и алгоритм функционирования. Сущность данного способа заключается в следующем. В вычислительный блок поступает информация о курсе судна, выдаваемом ССК, о расстояниях (D1, D2, D3) и курсовых углах (β1, β2,c β3), измеренных ЛЛ. Далее происходит расчет координат ЛЛ (ϕл, λл) и его пеленг на ОУО (Πi) с последующим вычислением эталонного значения курса судна (Кэ). Для определения погрешности ССК необходимо сравнить эталонное значение (Кэ) с измеренным (Кс). Таким образом, полученная погрешность позволяет осуществлять контроль точностных характеристик ССК при реальной эксплуатации, что значительно повысит качество навигационного обеспечения безопасности мореплавания.
При реализации способа контроля точностных характеристик ССК при реальной эксплуатации на основе установленного на берегу ЛЛ, его структурная реализация и алгоритм функционирования. Сущность способа заключается в измерении ЛЛ расстояний (D1, D2, D3) и курсовых углов (β1, β2, β3) до ОУО, размещенных на судне, расчете координат ЛЛ (ϕл, λл) и волоконно-оптической решетки (ϕoi, λoi), вычислении пеленгов с ЛЛ на ОУО (Пi) и эталонного значения курса судна (Кэ) с последующим его сравнением с курсом, выработанным ССК (Кc). Рассчитанная погрешность (ΔК=Кс-Кэ) используется в процессоре для оценки точности ССК при реальной эксплуатации, что значительно повысит качество навигационного обеспечения безопасности мореплавания. Предложенные способы контроля точностных характеристик СА СН на основе установленного на берегу (или на судне) ЛЛ, их структурные реализации и алгоритмы функционирования позволяют с высокой точностью определять погрешности СА СН в различных условиях реальной эксплуатации и информировать судоводителей о действительных, а не о потенциальных точностных характеристиках, что в определенной мере повышает уровень навигационного обеспечения безопасности мореплавания. Кроме того, эти способы контроля точностных характеристик СА СН имеют ряд преимуществ по сравнению с лабораторными, а именно:
1) простота в технической реализации и высокая надежность;
2) мобильность в использовании и относительная дешевизна;
3) возможность проверки точности СА СН в реальных условиях в процессе эксплуатации (без демонтажа аппаратуры с судна) и др.
Источники информации.
1. Патент RU №2082090 С1, 22.02.1994.
2. Интернет источник: e-mail:mailto:info@tlcnovo.ru?subject.
3. Патент RU №2330789 С1, 10.08.2008.
4. Патент RU №2245914 С1, март 2005.
5. Справочник капитана / Под. ред. Дмитриева В.И. СПб.: Элмор, 2009. 816 с.
6. Адерихин И.В., Кищенко С.С, Сальников А.И. Способ контроля точностных характеристик судовых приемоиндикаторов спутниковой навигации при эксплуатации // Транспортная безопасность и технологии. 2006. №2. С. 61-62.
7. ГОСТ РВ 8.560-95. Государственная система обеспечения единства измерений. Средства измерений военного назначения. Испытания и утверждение типа. М.: Госстандарт России, 1994. 28 с.
8. Кривов А.С., Донченко СИ., Денисенко О.В. Комплекс эталонов и средств измерений для испытаний аппаратуры потребителей космических навигационных систем ГЛОНАСС/GPS // Информост.2004. №1 (31). С. 46-47.
9. Технико - эксплуатационные требования на лазерную систему швартовки крупнотоннажных судов. - МФ - 02 - 22/848 - 64, 2002.
10. Аснис Л.Н., Васильев В.П., Волконский В.Б. Лазерная дальнометрия. М.: Радио и связь, 1995. 256 с.
11. Адерихин И.В., Сальников А.И. Использование спутниковой связи и навигации в системах дальней идентификации и контроля местоположения судов. Тезисы доклада. Материалы XXIX НПК ППС МГАВТ. М.: МГАВТ, 2007. С. 4-5.
12. Адерихин И.В., Сальников А.И. Методика контроля точностных характеристик судовых приемоиндикаторов спутниковой навигации при эксплуатации. Тезисы доклада. Материалы XXVIII НПК ППС МГАВТ. М.: МГАВТ, 2006. С. 5-6.
13. Адерихин И.В., Сальников А.И. Способ контроля точности судовых приемоиндикаторов спутниковой навигации при реальной эксплуатации. Сборник научных трудов "Повышение эффективности судопропуска, судовых технических и радионавигационных систем и безопасности плавания". М.: Альтаир-МГАВТ, 2008. С. 3-5.
14. Адерихин И.В., Сальников А.И. Способ контроля точностных характеристик судовых спутниковых компасов и пути его реализации при эксплуатации. Тезисы доклада. Материалы XXXI НПК ППС МГАВТ. М.: МГАВТ, 2009. С. 23-24.
15. Отчет о НИР "Способы повышения и контроля точностных характеристик судовой аппаратуры радионавигационной системы при эксплуатации". Рук. темы д.т.н., проф. Адерихин И.В., ответств. исполн. Сальников А.И. Госрегистрация №01201061485. М.: МГАВТ, 2010. 118 с.
16. Куршин В. В. Математическое и программное обеспечение навигации с использованием систем ГЛОНАСС/GPS/WAAS. Диссертация на соискание ученой степени д.т.н. М., 2003. 339 с.
17. Gyrocompass Yokogawa CMZ700S (проспект). Yokogawa, 2007.
18. Magellan GPS Satellite Navigation NAV-1200 (проспект). MSC, 1995. Precision Positioning and Tracking System "Fanbeam 4" (проспект). Kongsberg, 2009.
19. The Mariner's Handbook. NP100. Ninth Edition. UKHO, 2009.
20. Глобальная навигационная спутниковая радионавигационная система ГЛОНАСС / под ред. Харисова В.Н., Перова А.И., Болдина В.А. - Изд. 4-е. М.: Радиотехника, 2010. 800 с.
21. 62. Сикарев И.А. Функционально устойчивые автоматизированные идентификационные системы для мониторинга и управления движением судов на речном транспорте. Диссертации на соискание ученой степени д.т.н. СПб., 2010. 234 с.
22. Фарватер РК -2306 (проспект). Радио Комплекс, 2009. 4 с.
23. Кожухов В.П., Жухлин A.M., Кондрашихин В.Т. и др. Математические основы судовождения. М.: Транспорт, 1993. 200 с.
24. Выгодский М.Я. Справочник по элементарной математике. М.: Астрель, 2006. 509 с.
25. Выгодский М.Я. Справочник по высшей математике. М.: Астрель, 2006. 991 с.
26. Сборник характерных аварийных случаев на морском транспорте в период 2004-2006 годов. СПб.: ЗАО ЦНИИМФ, 2007. 124 с.
27. Шебшаевич B.C., Григорьев М.Н., Кокина Э.Г. и др. Дифференциальный режим сетевой спутниковой радионавигационной системы // Зарубежная радиоэлектроника. 1989. №1.С.5-33.
28. Лентарев А.А. Морские районы систем обеспечения безопасности мореплавания. Владивосток: Мор. гос. ун-т, 2004. 114 с.
29. Дмитриев В.И., Григорян В.Л., Катенин В.А. Навигация и лоция. М.: Моркнига, 2009. 472 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ШВАРТОВКИ СУДНА | 2006 |
|
RU2330789C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ПРОВОДКИ СУДНА | 2012 |
|
RU2501708C1 |
| СПОСОБ ШВАРТОВКИ СУДНА | 2007 |
|
RU2350506C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2012 |
|
RU2483280C1 |
| СПУТНИКОВЫЙ РЕЧНОЙ КОМПАС | 2009 |
|
RU2411451C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ПРОВОДКИ СУДОВ | 2005 |
|
RU2277495C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС ВЫСОКОСКОРОСТНЫХ СУДОВ | 2004 |
|
RU2260191C1 |
| Система прогнозирования безопасного расхождения судов | 2022 |
|
RU2780081C1 |
| Способ высокоточного определения навигационных элементов движения судна | 2016 |
|
RU2643072C2 |
| Способ текущего контроля остойчивости судна | 2024 |
|
RU2829030C1 |


Изобретение относится к области швартовки судов с использованием спутниковой навигационной системы. Система швартовки судна включает в себя приемник спутниковой навигационной системы (СНС), рулевой привод, носовое подруливающее устройство, датчик руля, датчик тяги, блок программного управления, датчик угловой скорости и вычислителя, в который вводят из приемника СНС сигналы координат судна, скорость хода судна, производную скорости хода судна и путевой угол, из датчика руля - сигнал угла руля, из датчика угловой скорости - сигнал угловой скорости и из датчика тяги - сигнал тяги, дополнительно используют радары и регулятор оборотов гребного винта. Вводят в блок программного управления сигналы координат центральной точки швартовки судна и длину вектора путевого угла в точке начала второго этапа швартовки, по сигналам координат судна и сигналам координат центральной точки швартовки судна в вычислителе формируют сигналы заданного путевого угла и длины вектора путевого угла. Сигнал длины вектора путевого угла вводят в блок программного управления, где формируют в зависимости от длины вектора путевого угла сигналы программной скорости хода судна, программного курса и разности сигналов длины вектора путевого угла и длины вектора путевого угла точки начала второго этапа швартовки, сравнивают эти сигналы, если разность сигналов положительна, в вычислителе формируют три сигнала управления первого этапа швартовки. При этом посредством радаров измеряют расстояние, и/или пеленг, и/или курс, по крайней мере, до трех оптических угловых отражателей, установленных на причальном основании с известными координатами, рассчитывают координаты точки установки радара на судне с последующим их преобразованием в географическую систему координат, вычисляют координаты точки установки антенны приемника СНС, вычисляют эталонные координаты точки установки антенны приемника СНС, вычисляют погрешности расстояний, пеленга и курса, вычисляют поправки, которые вводят в вычислитель. Достигается повышение точности швартовки. 2 н.п. ф-лы, 10 ил.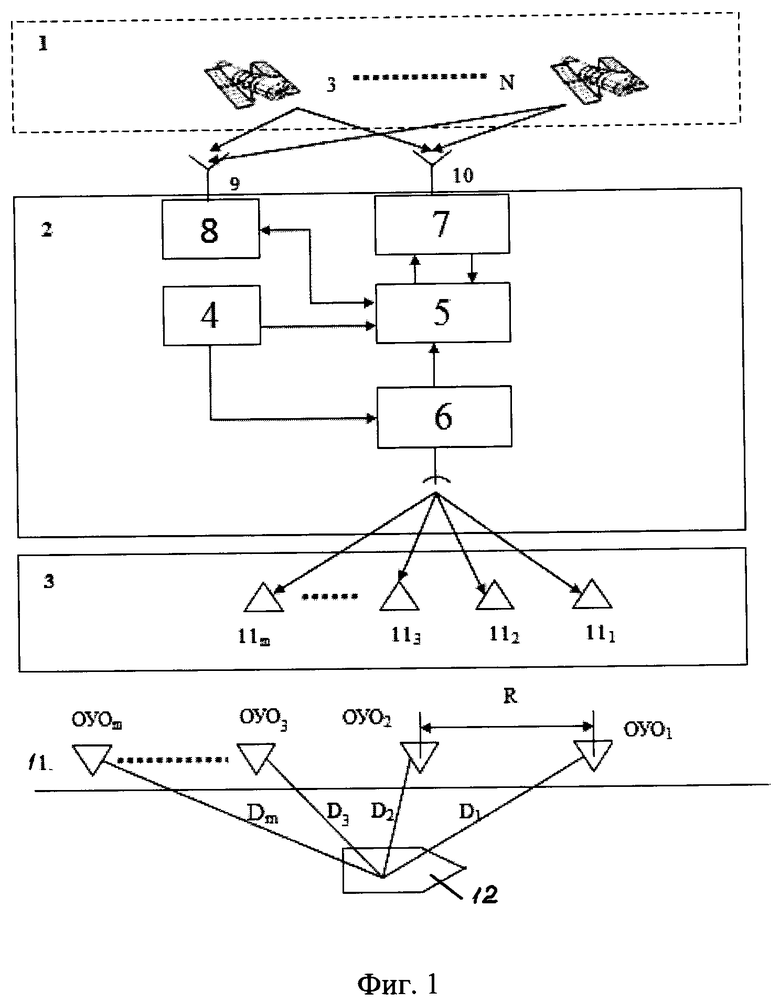
1. Способ швартовки судна с использованием приемника спутниковой навигационной системы (СНС), рулевого привода, носового подруливающего устройства, датчика руля, датчика тяги, блока программного управления, датчика угловой скорости и вычислителя, в который вводят из приемника СНС сигналы координат судна, скорости хода судна, производной скорости хода судна и путевого угла, из датчика руля - сигнал угла руля, из датчика угловой скорости - сигнал угловой скорости и из датчика тяги - сигнал тяги, дополнительно используют радары и регулятор оборотов гребного винта, вводят в блок программного управления сигналы координат центральной точки швартовки судна и длину вектора путевого угла в точке начала второго этапа швартовки, по сигналам координат судна и сигналам координат центральной точки швартовки судна в вычислителе формируют сигналы заданного путевого угла и длины вектора путевого угла, сигнал длины вектора путевого угла вводят в блок программного управления, где формируют в зависимости от длины вектора путевого угла сигналы программной скорости хода судна, программного курса и разности сигналов длины вектора путевого угла и длины вектора путевого угла точки начала второго этапа швартовки, сравнивают эти сигналы, и если разность сигналов положительна, в вычислителе формируют три сигнала управления первого этапа швартовки, при равенстве нулю или отрицательном значении разности этих сигналов в вычислителе формируют три сигнала управления второго этапа швартовки, формирование в вычислителе трех сигналов управления первого этапа швартовки осуществляют следующим образом: первый сигнал управления рулевым приводом в виде алгебраической суммы сигналов угла курса, угловой скорости, угла руля и программного курса, выработанного в блоке программного управления, подают на вход рулевого привода, второй сигнал управления носовым подруливающим устройством в виде алгебраической суммы сигналов путевого угла, заданного путевого угла, производной путевого угла и тяги подают на вход носового подруливающего устройства, третий сигнал управления регулятором оборотов гребного винта в виде алгебраической суммы сигналов скорости хода судна, ее производной и программной скорости хода судна, выработанной в блоке программного управления, подают на вход регулятора оборотов гребного винта, формирование в вычислителе трех сигналов управления второго этапа швартовки осуществляют следующим образом: сигнал управления рулевым приводом в виде алгебраической суммы сигналов угла курса и программного курса, сформированного в блоке программного управления, подают на вход рулевого привода, причем знак сигнала, подаваемого на вход рулевого привода, изменяют на обратный при заднем ходе судна, сигнал управления носовым подруливающим устройством в виде алгебраической суммы сигналов расстояний до пирса от носового и кормового радаров и производной от разности этих сигналов подают на вход носового подруливающего устройства, сигнал управления регулятором оборотов гребного винта формируют либо в виде алгебраической суммы сигналов скорости хода судна и ее производной и программной скорости хода судна, выработанной в блоке программного управления, который затем подают на вход регулятора оборотов гребного винта, если сигнал длины вектора путевого угла больше заданной уставки, либо, если сигнал заданной длины вектора путевого угла меньше уставки, сигнал управления регулятором оборотов гребного винта формируют в виде алгебраической суммы путевого угла и заданного путевого угла, который затем подают на вход регулятора оборотов гребного винта, отличающийся тем, что посредством радаров измеряют расстояние, и/или пеленг, и/или курс, по крайней мере, до трех оптических угловых отражателей, установленных на причальном основании с известными координатами, рассчитывают координаты точки установки радара на судне с последующим их преобразованием в географическую систему координат, вычисляют координаты точки установки антенны приемника СНС, вычисляют эталонные координаты точки установки антенны приемника СНС, вычисляют погрешности расстояний, пеленга и курса, вычисляют поправки, которые вводят в вычислитель, при этом также вводят в вычислитель данные о расположении оптических уголковых отражателей (ОУО) и антенны спутникового приемоиндикатора (СПИ) (a1, b1, h1, a2, b2, h2, а3, b3, h3), координаты и курс судна (Хс, Yc, Zc, K), углов крена и дифферента (θ, ψ), а также расстояний (D1, D2, D3), измеренных радаром до ОУО, и его координат (Хл, Yл, Ζл), и последующим расчетом эталонных координат антенны СПИ (φэ, λэ, hэ), которые сравниваются с вычисленными координатами СПИ (φc, λс, hc) с использованием информационных сигналов от НКА, полученные поправки (Δϕ=ϕc-ϕэ; Δλ==λс-λэ; Δh=hc-hэ) также позволят контролировать точностные характеристики СПИ СН при реальной эксплуатации.
2. Система для швартовки судна по п.1, включающая приемник спутниковой навигационной системы (СНС), рулевой привод, носовое подруливающее устройство, датчик руля, датчик тяги, блок программного управления, датчик угловой скорости и вычислитель, в который вводят из приемника СНС сигналы координат судна, скорости хода судна, производной скорости хода судна и путевого угла, отличающаяся тем, что устройство содержит блок синхронизации, выход которого соединен с синхронизирующим входом процессора и радара, судовую и береговую автоматическую систему идентификации (АИС), береговые оптические угловые отражатели, аппаратура состоит из m ОУО (не менее трех), установленных на берегу вблизи судоходного пути на расстоянии R в точках с известными координатами.
| Способ высокоточного определения навигационных элементов движения судна | 2016 |
|
RU2643072C2 |
| Сепаратор для отделения почвенных комков от корней сахарной свеклы | 1960 |
|
SU151140A1 |
| СПОСОБ КООРДИНИРОВАННОГО МАНЕВРИРОВАНИЯ СУДНА | 2010 |
|
RU2429161C1 |
| ВИХРЕВАЯ ПРЯМОТОЧНАЯ ГИДРОТУРБИНА ДЛЯ ИСПОЛЬЗОВАНИЯ ЭНЕРГИИ ТЕЧЕНИЙ РЕК И ПРИЛИВОВ | 2007 |
|
RU2359149C1 |

