Изобретение относится к электротехнике, в частности к способам управления асинхронными электроприводами с измерителями углового положения вала двигателя и векторным управлением по потокосцеплению ротора, применяемыми в высокоточных следящих системах роботов и металлорежущих станках.
Известен способ векторного управления асинхронным электродвигателем (патент US 2003015989 A1 METHOD AND SYSTEM FOR CONTROLLING AN INDUCTION MACHINE, 2003, H02P 7/36), основанный на вычислении углового положения вектора потокосцепления ротора посредством интегрирования по времени значений задания на компоненты тока, создающие магнитный поток и электромагнитный момент двигателя, сложения в определенной пропорции результата интегрирования с углом поворота вала. Результирующее значение угла используется для координатных преобразований значений токов фаз статора в вектор, компоненты которого в неподвижной относительно статора системе координат принимаются за фактические значения компонент, создающих магнитный поток и электромагнитный момент. Разности между заданными и фактическими значениями компонент поступают на пропорционально-интегральные или иные регуляторы, формирующие компоненты вектора ошибки регулирования. Последний после дополнительного преобразования во вращающуюся систему координат используется для управления силовыми ключами посредством широтно-импульсного модулятора. Значение модуля вектора потокосцепления устанавливается в процессе работы регуляторов автоматически, при условии правильной настройки.
Недостатком известного способа является невысокая точность оценивания углового положения вектора потокосцепления, обусловленная статической и динамической погрешностью регулирования. Указанный недостаток усугубляется тем, что координатные преобразования приводят к необходимости регулирования величин, изменяющихся по законам, близким к синусоидальным. В случае появления неточности измерений, действия помех или перегрузок по моменту нарушается заданное соотношение между моментообразующей и потокообразующей компонентами вектора тока, что приводит к срыву регулирования и остановке работы двигателя. Следует отметить, что, например, вентильный двигатель в этих же условиях продолжит работу, так как модуль и угловое положение вектора потокосцепления жестко связаны с положением ротора.
Известен способ управления асинхронным двигателем в полярной системе координат (Панкратов В.В. Способ управления асинхронным электродвигателем в полярной системе координат. \\ Изв. Вузов. Электромеханика. №3. 1991 г., с.67-71). В данном способе вместо использования ПИ-регулирования организуется регулирование в скользящем режиме проекций вектора потокосцепления на оси координатной системы, неподвижной относительно статора.
Недостатками способа являются косвенное определение самого вектора потокосцепления и возможность срыва скользящего режима при перегрузке двигателя.
Использование во всех описанных способах оценки только углового положения вектора потокосцепления, построенной в предположении, что динамическая ошибка в переходных процессах достаточно мала, приводит к снижению динамической точности.
Наиболее близким по технической сущности к заявленному техническому решению является способ управления асинхронным электродвигателем и устройство для его осуществления, использующее полярную систему координат для управления силовыми ключами (патент RU №2193814 «Устройство и способ управления асинхронным электродвигателем», H02P 21/00, 2002 г.), в котором асинхронный двигатель управляется путем регулирования выходного напряжения инвертора, преобразующего постоянный ток в переменный с регулированием частоты при регулируемом напряжении и регулированием частоты при постоянном напряжении, за счет изменения глубины модуляции, которое выполняется по команде на изменение намагничивающей составляющей тока в первичной обмотке асинхронного двигателя, на который подается напряжение от инвертора, и по команде на изменение компоненты напряжения, которые формируются в соответствии с упомянутыми соответствующими компонентами и выполняются в соответствии с командой на изменение моментообразующей составляющей тока статора.
Недостатком способа и выполненных по нему устройств является отсутствие оценки модуля потокосцепления, наличие которого позволило бы обойтись без координатных преобразований к неподвижным относительно статора осям и без обратного действия. В этом случае было бы возможно использование отдельных регуляторов модуля и углового положения вектора потокосцепления, работающих в системе координат, вращающейся совместно с полем статора. Кроме того, недостатком указанного способа является возможность срыва регулирования при перегрузке. Другим недостатком способа является то, что он не учитывает распределенный характер токов ротора, индуцированных токами статора, что приводит к невысокой точности регулирования асинхронного двигателя в динамических режимах разгона и ускорения.
Техническим результатом предлагаемого технического решения является повышение точности управления моментом асинхронного двигателя.
Технический результат достигается тем, что асинхронный двигатель управляется путем регулирования выходного напряжения инвертора, преобразующего постоянный ток в переменный с регулированием частоты при регулируемом напряжении за счет изменения глубины модуляции, которое выполняется по команде на изменение намагничивающей составляющей тока в обмотке статора асинхронного двигателя, на который подается напряжение от инвертора, и по команде на изменение моментообразующей составляющей, включающей измерение фазных токов и углового положения вала ротора на отрезке времени, равном длительности импульсной переходной функции затухания тока ротора, значения компонент вектора тока ротора относительно вектора тока статора вычисляют по формулам:


где h(t) - импульсная переходная функция затухания индукционных токов, f(t) - значение модуля вектора тока статора, φ(t) - угол поворота вала двигателя в электрических градусах, θ(t) - угол поворота вектора тока в электрических градусах.
Для достижения технического результата необходимо разработать наблюдающее устройство, способное формировать 2-мерный вектор оценки распределения магнитного потока ротора относительно текущего значения вектора тока статора.
Расчет пространственного распределения магнитного потока ротора в динамике может быть осуществлен любым из известных способов, например использованием метода конечных элементов и др. Суммарное значение магнитных потоков токов ротора может быть получено интегрированием по пространственной - угловому положению относительно текущего значения тока статора, и временной переменным, что образует 2-х компонентный вектор в декартовых или полярных координатах.
Построение наблюдающего устройства с учетом распределенных токов ротора асинхронного двигателя возможно с помощью пространственно-временной композиции (Бутковский А.Г. Структурная теория распределенных систем. М.: Наука. 1977) информационных сигналов датчиков фазных токов и измерителя положения вала.
Моментообразующая компонента вектора тока ротора формируется в результате взаимодействия двух одновременно протекающих процессов - затухания системы токов, индуцированных статором в роторе, и процесса транспортирования этих токов относительно волны тока статора, в общем случае с переменной скоростью. Процесс транспортирования с переменной скоростью может быть описан дифференциальным уравнением в частных производных первого порядка (Бутковский А.Г. Структурная теория распределенных систем. М.: Наука. 1977).
Вращающийся ротор асинхронного двигателя, пронизываемый магнитным полем статора, можно представить как линейный распределенный блок с входным сигналом f(x, t) и выходным Q(x, t), где f(x, t) - величина МДС статора, Q(x, t) -распределение токов по поверхности ротора, x - точки пространства, принадлежащие множеству значений дуги полюсного деления D статора, t - время. Выходная величина блока может быть вычислена следующим образом:

Функцию G(x, t, ξ, τ) принято называть импульсной переходной функцией (ИПФ) или функцией Грина, представляющей выходной сигнал распределенного блока на единичное импульсное возмущение в виде дельта-функции. Для систем с сосредоточенными параметрами ИПФ имеет тот же физический смысл, но без пространственных переменных x, ξ. Вычисление выходного сигнала в этом случае принято называть интегралом Дюамеля.
Прямые вычисления по указанным формулам сложнее, чем использование дифференциальных или операторных уравнений, однако могут применяться и в случаях, когда дифференциальные уравнения системы имеют переменные коэффициенты. Можно показать, в частности, что при неустановившихся режимах движения - ускорение и замедление ротора - именно такая ситуация имеет место.
Значения ИПФ могут быть получены путем анализа систем дифференциальных уравнений в частных производных, по таблицам решений, при численном моделировании, путем прямых измерений и другими способами. В большинстве случаев для описания динамики электромагнитных процессов ротора применяется дифференциальное уравнение первого порядка, ИПФ которого имеет вид затухающей экспоненты. Для учета распределенного характера процесса в данном случае может использоваться линейное дифференциальное уравнение 1-го порядка с постоянными коэффициентами a, b, c:

Q(x,0)=Q0(x), Q(0,t)=g(t), x≥0, t≥0.
описывающее процесс переноса вещества, энергии или поля вдоль оси x с постоянной скоростью при одновременном изменении состояния под воздействием распределенного возмущения f(x,t). Согласно (Бутковский А.Г. Структурная теория распределенных систем. М.: Наука. 1977) функция Грина для этой системы имеет вид:

Для уравнения с постоянными коэффициентами существует двухмерная передаточная функция с оператором Лапласа:

Сравнение функции (3) с ИПФ апериодического звена показывает, что в данном случае затухающая экспонента развернута в плоскости x, t вдоль направления bt-a, что соответствует транспортированию вдоль оси x с постоянной скоростью.
В динамических режимах разгона и торможения коэффициенты уравнения (2) становятся переменными. Для процесса простого транспортирования с учетом переменного запаздывания уравнение имеет вид:

с краевым условием
Q(0, t)=0, t≥t0
и начальным условием

где v(t) представляет собой скорость переноса вещества, энергии или информации.
Импульсная переходная функция (функция Грина) данного объекта имеет вид:

Рассматривая (6), можно сделать вывод, что выражение аналогично (3), с тем исключением, что при транспортировании не происходит изменения значений по экспоненте. Выражение под знаком интеграла просто означает путь, пройденный за время транспортирования с переменной скоростью.
Рассмотрим систему уравнений для асинхронного двигателя с одной парой полюсов. Правая часть (2) имеет вид произведения двух функций - пространственного распределения МДС синусоидальной формы и суммарной амплитуды токов фаз статора, зависящей от времени (Шрейнер Р.Т. Математическое моделирование электроприводов переменного тока с полупроводниковыми преобразователями частоты. Екатеринбург. УРО РАН, 2000.) Будем считать, что дуга полюсного деления двигателя развернута вдоль оси x, однако заметим, что левое граничное условие Q(0,t) равно правому граничному значению Q(l,t), что соответствует замыканию распределенного блока единичной обратной связью. В результате выходной сигнал данного блока кроме свойства транспортирования приобретает и свойство круговой перестановки значений Q(x,t) по пространственной координате x. Для окружности поперечного сечения двигателя это равносильно вращению пространственного распределения наведенных токов в соответствии с текущим временем и относительной скоростью поля.
Сложное для практического использования выражение (1) может быть упрощено, учитывая, что при интегрировании систем типа (2) в случае, когда подинтегральные функции представляют собой произведения функций, каждая из которых зависит лишь от одной переменной, возможно раздельное интегрирование по временной и пространственной переменным. Кроме того, так как распределение магнитодвижущих сил в поперечном сечении двигателя близко к синусоидальному, можно считать, что в любой момент времени пространственное распределение токов представляет собой суперпозицию синусоидальных компонент, т.е. само является синусоидальным.
Интеграл по пространственной переменной системы индукционных токов с синусоидальным распределением, возникающей в роторе при воздействии единичного импульса, может быть описан вектором, амплитуда которого пропорциональна величине магнитного потока, создаваемого всей системой токов от данного импульса, а фазовый угол изменяется в течение времени в соответствии с положением ротора, амплитудой и фазой вектора тока статора. Суммирование таких векторов, возникающих от единичных импульсов на интервале времени затухания тока, дает суммарное значение вектора магнитного потока, создаваемого токами ротора.
Для полного определения выходного сигнала распределенного блока по (1) необходимо запоминать все значения модулей векторов наведенных токов с учетом величины их затухания вместе с их углами поворота относительно текущего положения волны тока статора и провести векторное суммирование их на интервале времени длительности ИПФ ротора. Первая часть может быть выполнена обычным способом, с использованием динамического звена, ИПФ которого соответствует скорости затухания наведенных токов в роторе, но в этом случае не учитывается пространственная компонента блока. Однако, учитывая, что между временной и пространственной переменными имеется связь, выраженная интегралом в выражении (6), можно выполнить замену переменных с помощью двух преобразований вращения векторов. С этой целью вводятся два одинаковых динамических звена, по одному для каждой из компонент вектора, и два блока вращения векторов. Вначале модуль вектора тока статора поступает на первый блок вращения векторов, причем угол вращения равен разности углов поворота вектора тока статора и угла поворота ротора. Система уравнений для данного случая имеет вид:
где h(t) - ИПФ затухания индукционных токов, f(t) - значение модуля вектора тока статора, ζ(t) - разность углов поворота вектора тока статора φ(t) и угла поворота ротора θ(t).
Из (7) видно, что в интегралах прошлые значения f(t) уменьшаются с течением времени по величине соответственно величине ИПФ для данного τ и, кроме того, повернуты относительно текущего значения на угол ζ(t-τ). Однако вектор X1(t), Y1(t) имеет вращение относительно вектора тока статора с частотой скольжения. Для приведения вектора X1(t), Y1(t) в состояние, удобное для управления потоком, используется второй блок вращения, в котором компоненты вектора поворачиваются на угол, обратный углу вращения первого блока. Таким образом, система (7) принимает вид:


где h(t) - ИПФ затухания индукционных токов, f(t) - значение модуля вектора тока статора, ζ(t)=φ(t)-θ(t).
Таким образом, путем комбинации векторного представления с интегралом Дюамеля становится возможным переход от распределенной системы к 2-мерной системе с сосредоточенными параметрами, что повышает точность определения магнитного потока ротора.
Для реализации способа в устройстве векторного управления моментом асинхронного электродвигателя, содержащем задатчик активного тока, задатчик магнитного тока, блок векторного сравнения, первый выход которого через регулятор модуля поля и второй выход последовательно через регулятор фазового угла и сумматор углов соединены с входами схемы управления инвертором, выходы которой через инвертор и измерители тока соединены с асинхронным двигателем, на валу ротора которого установлен измеритель углового положения, дополнительно введены блок векторизации, измеритель модуля и угла тока статора, первый и второй блоки вращения векторов, векторное динамическое звено, блок вычитания углов и блок обращения углов, причем измеритель углового положения соединен с блоком вычитания углов, измерители тока подключены к измерителю модуля и угла тока статора, который выходом модуля соединен со входом модуля первого блока вращения векторов, а выходом угла соединен со вторым входом сумматора углов и со вторым входом блока вычитания углов, выход блока вычитания углов соединен со вторым входом первого блока вращения векторов и со входом блока обращения угла, выходы модуля и угла первого блока вращения векторов соединены соответственно с входами модуля и угла векторного динамического звена, выходы модуля и угла векторного динамического звена соединены соответственно с входами модуля и угла второго блока вращения векторов, выход блока обращения угла соединен с третьим входом второго блока вращения векторов, выходы модуля и угла которого соединены с входами модуля и угла блока векторного сравнения, к которому через блок векторизации подключены задатчик активного и задатчик магнитного тока.
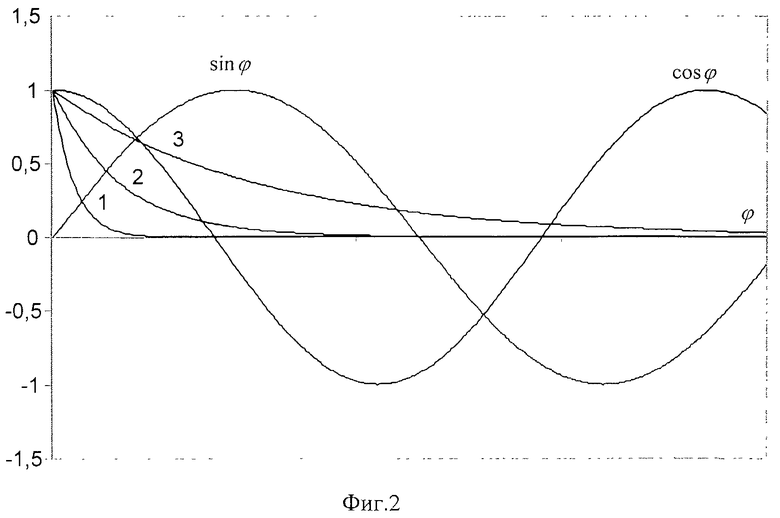
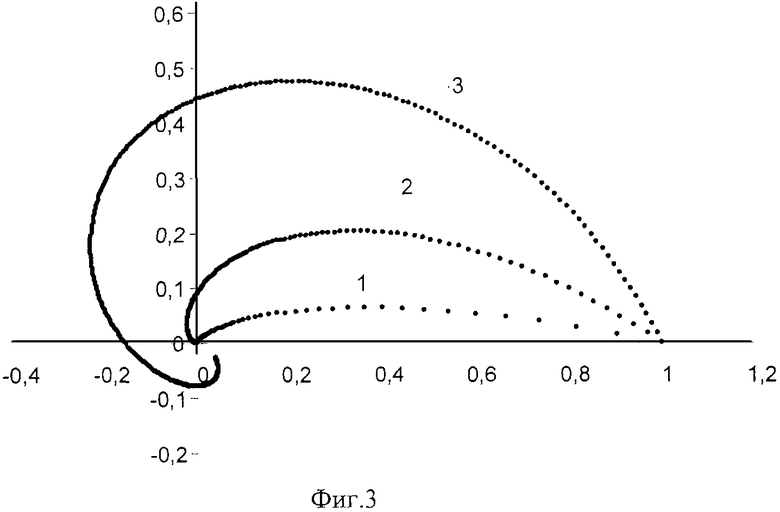
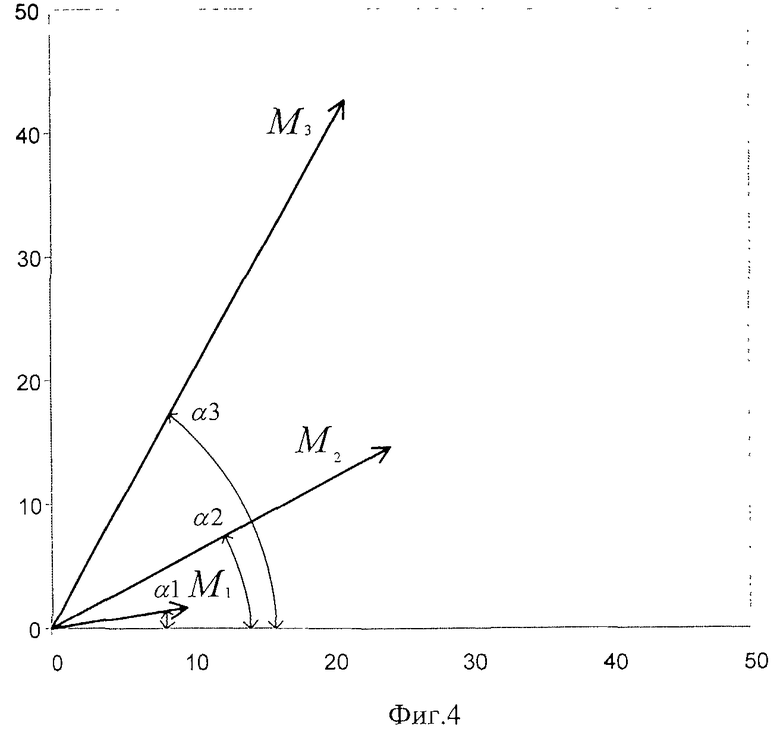
На фиг.1 представлена функциональная схема асинхронного электропривода, реализующая предложенный способ, а на фиг.2 - диаграммы изменения основных координат предлагаемого решения при различных значениях частоты скольжения ротора. Векторные импульсные переходные функции (ИПФ) от тока статора к потоку ротора приведены на фиг.3, а установившиеся значения векторных переходных функций для трех различных значений скачков скольжения приведены на фиг.4.
На фиг.1 цифрами обозначены: задатчик магнитного тока 1, задатчик активного тока 2, блок векторизации 3, блок векторного сравнения 4, регулятор модуля поля 5, регулятор фазового угла поля 6, сумматор углов 7, схема управления инвертором 8, инвертор 9, первый измеритель тока 10, второй измеритель тока 11, асинхронный двигатель 12, измеритель углового положения ротора 13, измеритель модуля и угла тока статора 14, первый блок вращения векторов 15, векторное динамическое звено 16, второй блок вращения векторов 17, блок вычитания углов 18, блок обращения углов 19.
На фиг.1 приняты следующие обозначения: Im - задание для магнитной составляющей потока; Iа - задание для моментной составляющей потока; |ψRZ| - модуль заданного вектора потока; αRZ - фазовый угол заданного вектора потока; ΔI - разность модулей между заданным и действительным векторами потока; Δα - разность фазовых углов между заданным и действительным векторами потока; V - значение выхода регулятора модуля потока; δ - значение выхода регулятора фазового угла потока; δ* - значение суммы фазового угла регулятора с фазовым углом тока статора; Sa - сигнал управления инвертором фазы A; Sb - сигнал управления инвертором фазы B; Sc - сигнал управления инвертором фазы C; θ - угол поворота вала ротора; φ - фазовый угол вектора тока статора; M1 - модуль вектора выхода первого блока вращения векторов; α1 - фазовый угол вектора выхода первого блока вращения векторов; M2 - модуль вектора выхода векторного динамического звена; α2 - фазовый угол вектора выхода векторного динамического звена; |ψr| - модуль вектора потока ротора; αr - фазовый угол вектора потока ротора.
Устройство по предложенному способу состоит из задатчика магнитного тока 1 и задатчика активного тока 2, выходы которых соединены с блоком векторизации 3, выходы которого соединены с первыми и вторым входами блока векторного сравнения 4, первый выход которого соединен с регулятором модуля поля 5, а второй - с регулятором угла фазового угла поля 6, выход которого соединен с сумматором углов 7, выход которого соединен с вторым входом схемы управления инвертором 8, первый вход которой соединен с выходом регулятора модуля поля 5, а три выхода схемы управления инвертором 8 соединены с входами инвертора 9, выходы токов фаз которого через первый измеритель тока 10 и второй измеритель тока 11 соединены с асинхронным электродвигателем 12 с входами измерителя модуля и фазы тока статора 14, на валу электродвигателя 12 установлен измеритель углового положения 13, выход которого соединен с первым входом блока вычитания углов 18.
Выход модуля измерителя модуля и угла тока статора 14 соединен со входом модуля первого блока вращения векторов 15, выход фазового угла тока измерителя модуля и угла тока статора 14 соединен с входом угла сумматора углов 7 и с вторым входом блока вычитания углов 18, причем выход блока вычитания углов 18 соединен с входом управления поворотом угла первого блока вращения векторов 15 и с входом блока обращения угла 19, выход модуля первого блока вращения векторов 15 соединен со входом модуля векторного динамического звена 16, выход угла поворота первого блока вращения векторов 15 соединен со входом угла векторного динамического звена 16, а выход модуля векторного динамического звена 16 соединен со входом модуля второго блока вращения векторов 17 и выход угла векторного динамического звена 16 соединен со входом угла второго блока вращения векторов 17. Выход блока обращения угла 19 соединен с входом управления поворотом второго блока вращения векторов 17, выходы оценки модуля и угла потока блока вращения векторов 17 соединены с входами модуля и угла блока векторного сравнения 4.
Блоки 15, 16, 17, 18, 19 играют роль наблюдателя потока ротора и формируют значения оценок модуля и фазового угла вектора потока ротора двигателя на основе интеграла свертки вектора тока статора по пространственной и временной координатам. В качестве пространственной координаты выступает угол поворота вала ротора относительно текущего значения вектора тока статора, а в качестве временной - интервал времени, равный длительности ИПФ, предшествующий моменту текущего измерения вектора тока статора.
Блок 3 формирует вектор задания модуля и угла поворота вектора потока ротора относительно текущего вектора тока статора на основе задания на моментообразующую и потокообразующую компоненты.
Блок векторного сравнения 4 вычисляет ошибки по модулю и углу между заданным и фактическим положением вектора потока ротора. Значение ошибки по модулю поступает на регулятор модуля поля 5, а значение ошибки по углу поступает на регулятор фазового угла поля 6, после чего складывается с текущим значением угла тока статора на сумматоре углов 7. Сигналы ошибки по модулю и углу через схему управления инвертором 8 формируют последовательность широтно-модулированных импульсов напряжения, создающих трехфазную последовательность токов статора.
Наблюдатель потока ротора представляет собой совокупность первого блока вращения векторов 15 на значение угла скольжения, векторного динамического звена 16, второго блока вращения векторов 17 на значение, обратное величине угла скольжения. Характеристики векторного динамического звена выбираются таким образом, чтобы импульсная переходная функция (ИПФ) соответствовала ИПФ затухания индуцированных токов ротора. Векторное динамическое звено 16 в простейшем случае - в декартовой системе координат - представляет собой два апериодических звена 1-го порядка, коэффициенты передачи которых одинаковы и равны коэффициенту передачи в канале ток статора - поток, а постоянные времени равны постоянной времени затухания тока в роторе. В полярной системе координат это звено имеет дополнительные координатные преобразования из полярной системы координат и обратно.
Результатом вычислений на выходе блока вращения векторов 17 является вектор, значение модуля которого пропорционально модулю вектора потока, а угловое положение близко к разности углов между векторами потока ротора и тока статора.
Принцип действия наблюдателя основан на моделировании процесса транспортирования затухающих токов, индуцированных в беличьей клетке ротора на интервале времени (-∞-t). Модули этих векторов затухают по экспоненциальному закону, а угловые положения определяются суммой приращений углов на этом же интервале. Наблюдатель осуществляет суммирование этих векторов на бесконечном интервале времени, однако существенны лишь значения на интервале времени, предшествующем 3-4 постоянным времени ротора. На фиг.3 приводятся модули векторов ИПФ тока ротора 1, 2, 3 для трех различных скоростей скольжения в функции электрических градусов. Из графиков видно, что при более высоких скоростях скольжения процесс затухания модуля тока распространяется на большие значения углов поворота (кривые 1, 2). Однако, учитывая, что в создании электромагнитного момента наибольший вес имеют вектора, сдвинутые на 90 эл. градусов, а в создании магнитного потока - сдвинутые на 0 градусов, значения модулей токов следует умножить на значения синуса 4 и косинуса 3 углового аргумента в эл. градусах. Векторные ИПФ 1, 2, 3, представляющие собой множество векторов токов, индуцированных в роторе после единичного импульса с синусоидальным распределением магнитодвижущих со стороны статора для трех различных значений скольжения, представлены на фиг.4.
Из графиков 1-3 видно, что с увеличением частоты скольжения возрастают модули и угловое отклонение элементарных векторов. Однако на кривой 3 видно, что с увеличением скольжения часть транспортируемых векторов ориентируется уже в отрицательном направлении, что приводит к размагничиванию двигателя. Дальнейшее увеличение скольжения приводит к появлению большей колебательности векторной ИПФ и снижению магнитного потока.
Рассмотрим случай установившегося вращения ротора двигателя. В этих условиях постоянное воздействие МДС со стороны статора можно представить бесконечной последовательностью во времени синусоидальных импульсов одинаковой амплитуды по пространственной переменной, каждый из которых может быть представлен некоторым вектором, модули которых постоянны, а фазовые углы линейно зависят от времени. Общим результатом интегрирования этих импульсов по пространственной и временной переменным является сумма всех векторов (векторная сумма). Поскольку в установившемся режиме пространственное распределение не зависит от времени, в результате сложения всех векторов на выходе блока вращения векторов 17 получится суммарный вектор с некоторой амплитудой и фазой. Результаты суммирования для трех значений амплитуды скачков скольжения представлены на фиг.4.
В режимах ускоренного движения ИПФ данного наблюдателя меняется по тому же закону, что и ИПФ ротора, что и обеспечивает повышение точности оценки.
Полученные векторы могут использоваться в декартовой или полярной системе координат. Для управления широтно-импульсным преобразователем и учета насыщения магнитной системы удобнее использовать полярную систему координат, принимая во внимание существенное различие характеристик по каналам управления модулем и фазой.
Устройство работает следующим образом: в начальный момент времени устанавливается постоянное значение на входе задатчика магнитного тока 1 и нулевое значение на входе задатчика активного тока 2. Значение угла поворота принимается равным начальной фазе. Широтно-модулированные импульсы вызывают протекание тока в статоре, значение которого устанавливается на желаемом уровне через интервал времени, определяемый настройкой регулятора модуля поля 5. После установления магнитного потока система управления моментом готова к работе.
Для задания требуемого значения момента задатчик активного тока 2 увеличивает или уменьшает начальную фазу, что изменяет фазовый угол тока в статоре по отношению к потоку ротора. Взаимодействие между током, индуцированным в роторе, и током статора создает вращающий момент, приводящий ротор в движение, что приводит к смещению (отставанию) углового положения вала двигателя вместе с системой индуцированных токов.
Воздействие вектора переменной амплитуды, вращающегося с частотой скольжения, на векторное динамическое звено 16 приводит к тому, что текущие значения модуля вектора тока статора запоминаются на интервал времени, равный длительности ИПФ, причем их роль в выходном сигнале векторного динамического звена 16 будет постепенно снижаться, а фазовый сдвиг изменяться в соответствии с движением поля и ротора. Поскольку выходной вектор векторного динамического звена 16 имеет вращение с частотой скольжения, для приведения его в неподвижное состояние относительно задания, второй блок вращения векторов 17 выполняет операцию обратного вращения. В результате вычислений на выходе блока вращения векторов 17 формируется вектор оценки модуля и фазового угла магнитного потока, не совпадающий по направлению с вектором тока статора.
Значения оценок модуля и фазового угла потока ротора поступают на блок векторного сравнения 4, где сравниваются с заданными значениями от блока векторизации 3. Значения ошибки регулирования по модулю поступают на регулятор модуля поля 5 и далее на первый вход схемы управления инвертором 8, а значения ошибки по углу через регулятор фазового угла поля 6, складываясь с начальным значением фазы вектора тока на сумматоре углов 7, поступают на второй вход схемы управления инвертором 8.
На выходе схемы управления инвертором 8 формируются сигналы управления 3-фазным широтно-импульсным модулятором 9, формируются импульсы напряжения с амплитудой и фазой, обеспечивающими приведение модуля и фазы потока ротора к заданным значениям.
В результате устройство сохраняет высокое качество переходных процессов и обеспечивает высокую точность определения вектора потока ротора в динамических режимах, таким образом, повышая точность управления моментом асинхронного двигателя.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |
| Частотнорегулируемый электропривод | 1985 |
|
SU1292156A1 |
| ВЫСОКОДИНАМИЧНЫЙ БЕЗДАТЧИКОВЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД С НЕПОСРЕДСТВЕННЫМ УПРАВЛЕНИЕМ МОМЕНТОМ | 2012 |
|
RU2498497C1 |
| Электропривод переменного тока | 1981 |
|
SU1026272A1 |
| Частотно-регулируемый электропривод | 1986 |
|
SU1379932A2 |
| СПОСОБ ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ ВРАЩЕНИЯ ТРЕХФАЗНОЙ МАШИНЫ | 2013 |
|
RU2557071C2 |
| Электропривод | 1985 |
|
SU1309244A1 |
| Устройство для частотного управления асинхронным двигателем | 1978 |
|
SU744887A1 |
| ЭЛЕКТРОПРИВОД С АСИНХРОННЫМ ДВИГАТЕЛЕМ С СИСТЕМОЙ ПРЕДИКТИВНОГО УПРАВЛЕНИЯ МОМЕНТОМ | 2024 |
|
RU2829212C1 |
Изобретение относится к области электротехники и может быть использовано в высокоточных следящих системах роботов и металлорежущих станках. Технический результат: повышение точности управления моментом асинхронного двигателя. Асинхронный двигатель управляется путем регулирования выходного напряжения инвертора, преобразующего постоянный ток в переменный с регулированием частоты при регулируемом напряжении за счет изменения глубины модуляции, которое выполняется по команде на изменение намагничивающей составляющей тока в обмотке статора асинхронного двигателя, на который подается напряжение от инвертора, и по команде на изменение моментообразующей составляющей, включающей измерение фазных токов и углового положения вала ротора на отрезке времени, равном длительности импульсной переходной функции затухания тока ротора, значения компонент вектора тока ротора относительно вектора тока статора вычисляют по формулам, указанным в материалах заявки. Устройство содержит задатчик активного тока, задатчик магнитного тока, блок векторного сравнения, регулятор модуля поля, регулятор фазового угла и сумматор углов, схему управления инвертором, инвертор, измерители тока, асинхронный двигатель, измеритель углового положения, блок векторизации, измеритель модуля и угла тока статора, первый и второй блоки вращения векторов, векторное динамическое звено, блок вычитания углов и блок обращения углов. 4 ил.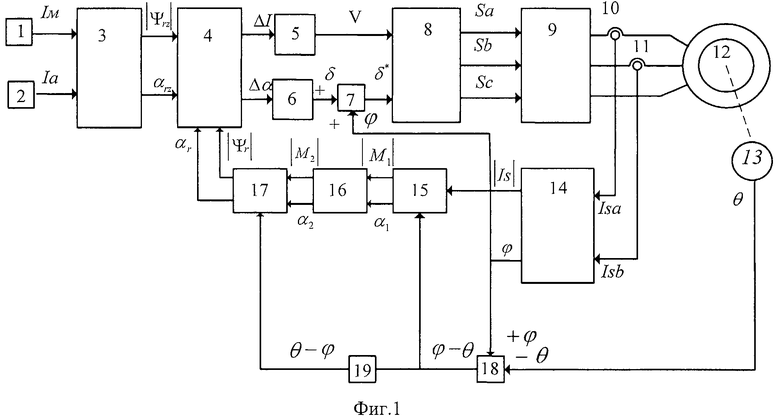
Устройство векторного управления моментом асинхронного электродвигателя, содержащее задатчик активного тока, задатчик магнитного тока, блок векторного сравнения, первый выход которого через регулятор модуля поля и второй выход последовательно через регулятор фазового угла и сумматор углов соединены с входами схемы управления инвертором, выходы которой через инвертор и измерители тока соединены с асинхронным двигателем, на валу ротора которого установлен измеритель углового положения, отличающееся тем, что дополнительно содержит блок векторизации, измеритель модуля и угла тока статора, первый и второй блоки вращения векторов, векторное динамическое звено, блок вычитания углов и блок обращения углов, причем измеритель углового положения соединен с блоком вычитания углов, измерители тока подключены к измерителю модуля и угла тока статора, который выходом модуля соединен со входом модуля первого блока вращения векторов, а выходом угла соединен со вторым входом сумматора углов и со вторым входом блока вычитания углов, выход блока вычитания углов соединен со вторым входом первого блока вращения векторов и со входом блока обращения угла, выходы модуля и угла первого блока вращения векторов соединены соответственно с входами модуля и угла векторного динамического звена, выходы модуля и угла векторного динамического звена соединены соответственно с входами модуля и угла второго блока вращения векторов, выход блока обращения угла соединен с третьим входом второго блока вращения векторов, выходы модуля и угла которого соединены с входами модуля и угла блока векторного сравнения, к которому через блок векторизации подключены задатчик активного и задатчик магнитного тока.
| УСТРОЙСТВО И СПОСОБ УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ | 1997 |
|
RU2193814C2 |
| СИСТЕМА УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ | 2008 |
|
RU2390091C1 |
| US 20030015989 A1, 23.01.2003 | |||
| DE 3744905 С2, 10.10.1995 | |||
| US 6590361 B2, 08.07.2003 | |||
| ГЕРБИЦИДНЫЙ СОСТАВ | 1993 |
|
RU2048772C1 |
| СПОСОБ СНИЖЕНИЯ ПОТЕРЬ ЭЛЕКТРОЭНЕРГИИ В СЕТЯХ НИЗКОГО НАПРЯЖЕНИЯ | 2000 |
|
RU2179776C2 |

