Изобретение относится к области звукодальнометрии и акустического управления и может быть использовано для измерения расстояний до объектов, перемещающихся во внутритрубных пространствах.
Известен способ измерения расстояния между двумя точками по методу однонаправленного измерения (А.А.Горбатов, Г.Е.Рудашевский «Акустические методы измерения расстояний и управления», М.: Энергоиздат, 1981 г., с.7-9), включающий подачу ультразвукового сигнала от излучателя ультразвукового сигнала, установленного в одной точке, прием ультразвукового сигнала приемником, установленным в другой точке, и измерение расстояния между двумя точками по времени прохождения ультразвукового сигнала от одной точки до другой.
Известен способ акустической дальнометрии (патент РФ №2315335 МПК (2006.01) G01S 15/08, опубл. 20.01.2008), выбранный в качестве прототипа, включающий подачу зондирующего сигнала первым приемоизлучающим датчиком, прием этого сигнала вторым приемоизлучающим датчиком, расположенным на перемещаемом внутритрубном устройстве, подачу от него ответного сигнала, прием ответного сигнала первым приемоизлучающим датчиком, причем подачу зондирующего и прием ответного сигналов осуществляют с внешней стороны трубы и определение расстояния между двумя приемоизлучающими датчиками путем измерения времени двунаправленного прохождения зондирующего сигнала и ответного сигнала.
Недостатком известных способов является высокая погрешность определения расстояния до внутритрубного объекта, обусловленная зависимостью скорости распространения ультразвукового сигнала от температуры, давления и состава среды, заполняющей трубопровод.
Задачей изобретения является создание способа акустической дальнометрии, позволяющего уменьшить погрешность измерения расстояний до объектов, перемещающихся во внутритрубных пространствах.
Поставленная задача решена за счет того, что в способе акустической дальнометрии, включающем подачу зондирующего сигнала с внешней стороны трубы на объект, перемещаемый внутри трубы, прием зондирующего сигнала и подачу ответного сигнала устройством генерирования активного ответа, расположенным на внутритрубном объекте, прием ответного сигнала, определение расстояния до объекта путем измерения времени двунаправленного прохождения зондирующего и ответного сигналов.
Согласно изобретению подачу зондирующего и прием ответного сигналов последовательно осуществляют из двух отстоящих друг от друга точек с внешней стороны трубы, измеряют расстояние между этими точками, затем определяют скорость распространения ультразвука в среде, заполняющей трубу, путем деления удвоенного расстояния между первой и второй точками на разность двунаправленного времени распространения сигналов между внутритрубным объектом и первой, и второй точками, используя полученное значение скорости, определяют расстояния до внутритрубного объекта.
За счет последовательной подачи зондирующих и приема ответных сигналов из двух отстоящих друг от друга точек с внешней стороны трубы, измерения расстояния между этими точками, определения скорости распространения ультразвука в среде, заполняющей трубу, путем деления удвоенного расстояния между первой и второй точками на разность двунаправленного времени распространения сигналов между внутритрубным объектом и первой, и второй точками, и использования полученного значения скорости для определения расстояния до внутритрубного объекта, обеспечивается возможность увеличить точность измерения расстояний до объектов, перемещающихся во внутритрубных пространствах.
На чертеже представлена структурная схема устройства, реализующего предлагаемый способ.
В таблице показаны результаты измерения удаления внутритрубного объекта от первого акустического дальномера.
Устройство акустической дальнометрии, реализующее предлагаемый способ (см. чертеж), содержит блок управления 1, первый дальномер 2, установленный в первой точке на внешней стороне трубы 3, второй дальномер 4, установленный в другой точке на внешней стороне трубы 3 и устройство генерирования активного ответа 5, установленное на внутритрубном объекте 6, перемещаемом во внутритрубном пространстве.
Блок управления 1 связан с первым дальномером 2, установленным на внешней стороне трубы 3, и вторым дальномером 4, установленным на внешней стороне трубы 3 на фиксированном расстоянии от первого дальномера 2.
Блок управления 1 может быть выполнен на любом микропроцессоре, например, ATMEGA 8, дальномеры 2 и 4 должны быть акустическими, например, по патенту РФ №2315335 МПК (2006.01) G01S 15/08, устройство генерирования активного ответа 5 может быть выбрано из патента РФ №2315335 МПК (2006.01) G01S 15/08. В качестве внутритрубного объекта может быть выбран внутритрубный скребок или герметизатор.
Вначале блок управления 1 выдает разрешающий сигнал на первый дальномер 2, который осуществляет подачу зондирующего сигнала на внутритрубный объект 6, перемещаемый внутри трубы 3, и прием ответного сигнала от устройства генерирования активного ответа 5, располагаемого на внутритрубном объекте 6. После приема ответного сигнала первый дальномер 2 определяет время двунаправленного распространения ультразвука до внутритрубного объекта 6 и передает его в блок управления 1. Затем блок управления 1 выдает разрешающий сигнал на второй дальномер 4, который осуществляет подачу зондирующего сигнала на внутритрубный объект 6, перемещаемый внутри трубы 3, и прием ответного сигнала от устройства генерирования активного ответа 5, расположенного на внутритрубном объекте 6. После приема ответного сигнала второй дальномер 4 определяет время двунаправленного распространения ультразвука до внутритрубного объекта 6 и передает его в блок управления 1. Блок управления 1 производит вычисление скорости распространения ультразвука в среде, заполняющей трубопровод по формуле:
где t1 - время двунаправленного распространения ультразвука от первого дальномера 2 до внутритрубного объекта 6,
t2 - время двунаправленного распространения ультразвука от второго дальномера 4 до внутритрубного объекта 6,
L - расстояние между первым 2 и вторым 4 дальномерами.
После этого блок управления 1 использует вычисленную скорость для расчета расстояния до внутритрубного объекта.
Испытания способа акустической дальнометрии проводились на лабораторном стенде. Длина трубы составляла 4,2 метра, диаметр трубы 0,3 метра. Труба была установлена вертикально и была заполнена водой. Устройство генерирования активного ответа 5 располагалось на имитаторе внутритрубного объекта. Имитатор был выполнен в виде цилиндра диаметром 0,28 метра и длиной 0,3 метра. Перемещение имитатора внутри трубы осуществляли с помощью веревки, на которой были нанесены деления с шагом 0,05 метра. На верхнем конце трубы был установлен механизм, позволяющий с помощью веревки поднимать и опускать имитатор внутритрубного объекта. Первый 2 и второй 4 дальномеры были установлены на расстоянии 1 м друг от друга, причем второй дальномер 4 был установлен ближе к имитатору внутритрубного объекта 6. Блок управления 1 определял расстояние между вторым дальномером 4 и имитатором внутритрубного объекта 6 вначале в воде, а затем в солевом растворе.
Результаты стендовых испытаний способа акустической дальнометрии, приведенные в таблице, показывают возможность измерения расстояния этим способом в различных средах с высокой точностью измерения. Погрешность измерения расстояния не превышает 0,02 метра в диапазоне от 0,5 до 3,0 метров. Погрешность измерения расстояния у прототипа составляет 0,04 метра, что в два раза больше, чем у предлагаемого способа.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АКУСТИЧЕСКОЙ ДАЛЬНОМЕТРИИ | 2006 |
|
RU2315335C1 |
| Импульсно-акустический способ определения местоположения внутритрубного очистного снаряда в магистральном трубопроводе | 2018 |
|
RU2691779C1 |
| Акустический способ и устройство измерения параметров морского волнения | 2019 |
|
RU2721307C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОТНОСИТЕЛЬНОГО ПОЛОЖЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ ПРИ МЕЖСАМОЛЕТНОЙ НАВИГАЦИИ | 2015 |
|
RU2606241C1 |
| ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2011 |
|
RU2463624C1 |
| Акустический способ измерения параметров движения слоистой морской среды | 2022 |
|
RU2801053C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ И РАДИАЛЬНОЙ СКОРОСТИ | 2024 |
|
RU2840790C1 |
| СПОСОБ УЛЬТРАЗВУКОВОЙ ДЕФЕКТОСКОПИИ ЦИЛИНДРИЧЕСКИХ ИЗДЕЛИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2146363C1 |
| МНОГОЧАСТОТНОЕ ПРИЕМОИЗЛУЧАЮЩЕЕ АНТЕННОЕ УСТРОЙСТВО | 2018 |
|
RU2700031C1 |
| ГИДРОАКУСТИЧЕСКАЯ СИНХРОННАЯ ДАЛЬНОМЕРНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ПОЗИЦИОНИРОВАНИЯ ПОДВОДНЫХ ОБЪЕКТОВ В НАВИГАЦИОННОМ ПОЛЕ ПРОИЗВОЛЬНО РАССТАВЛЕННЫХ ГИДРОАКУСТИЧЕСКИХ МАЯКОВ-ОТВЕТЧИКОВ | 2011 |
|
RU2483326C2 |
Изобретение относится к области звукодальнометрии и акустического управления и может быть использовано для измерения расстояний до объектов, перемещающихся во внутритрубных пространствах. Техническим результатом изобретения является уменьшение погрешности измерения. Способ акустической дальнометрии заключается в подаче зондирующего сигнала с внешней стороны трубы на объект, перемещаемый внутри трубы, прием зондирующего сигнала и подачу ответного сигнала устройством генерирования активного ответа, расположенным на внутритрубном объекте, прием ответного сигнала. Подачу зондирующего и прием ответного сигналов последовательно осуществляют из двух отстоящих друг от друга точек с внешней стороны трубы, измеряют расстояние между этими точками, затем определяют скорость распространения ультразвука в среде, заполняющей трубу, путем деления удвоенного расстояния между первой, и второй точками на разность двунаправленного времени распространения сигналов между внутритрубным объектом и первой, и второй точками, используя полученное значение скорости, определяют расстояния до внутритрубного объекта. 1 ил., 1 табл.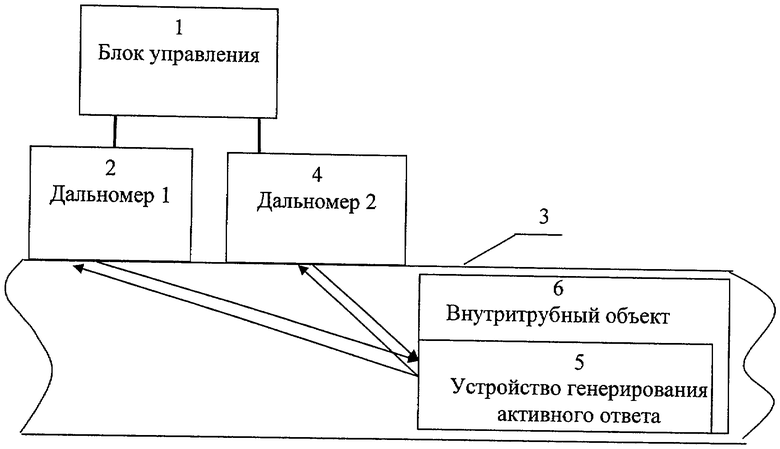
Способ акустической дальнометрии, включающий подачу зондирующего сигнала с внешней стороны трубы на объект, перемещаемый внутри трубы, прием зондирующего сигнала и подачу ответного сигнала устройством генерирования активного ответа, расположенным на внутритрубном объекте, прием ответного сигнала, определение расстояния до объекта путем измерения времени двунаправленного прохождения зондирующего и ответного сигналов, отличающийся тем, что подачу зондирующего и прием ответного сигналов последовательно осуществляют из двух отстоящих друг от друга точек с внешней стороны трубы, измеряют расстояние между этими точками, затем определяют скорость распространения ультразвука в среде, заполняющей трубу, путем деления удвоенного расстояния между первой и второй точками на разность двунаправленного времени распространения сигналов между внутритрубным объектом и первой и второй точками, используя полученное значение скорости, определяют расстояния до внутритрубного объекта.
| СПОСОБ АКУСТИЧЕСКОЙ ДАЛЬНОМЕТРИИ | 2006 |
|
RU2315335C1 |
| Пресс для изготовления деревянных криволинейных деталей путем склейки досок | 1946 |
|
SU71450A1 |
| ИМПУЛЬСНО-АКУСТИЧЕСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ВНУТРИТРУБНОГО СНАРЯДА В МАГИСТРАЛЬНОМ ТРУБОПРОВОДЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2307978C2 |
| Устройство для изготовления войлокообразных пластин из минерального волокна | 1943 |
|
SU67286A1 |
| JP 63243750 A, 06.05.1988. | |||

