Настоящая заявка испрашивает приоритет предварительной заявки США № 60/737087, озаглавленной "IMPROVED TIME TRACKING ALGORITHM VIA GUARD INTERVAL CORRELATION FOR OFDM SIGNALS", поданной 15 ноября 2005 года, переуступленной правопреемнику этой заявки и включенной в настоящий документ по ссылке.
Область техники
Настоящая заявка относится, в общем, к связи, более конкретно к методам выполнения временного отслеживания в приемнике системы связи.
Уровень техники
Мультиплексирование с ортогональным частотным разделением каналов (OFDM) - это метод модуляции с множеством несущих, который может обеспечивать хорошие рабочие характеристики для некоторых беспроводных сред. OFDM разбивает всю ширину полосы системы на множество (K) ортогональных частотных подполос, которые также упоминаются как поднесущие, тоны, элементы разрешения и т.п. В OFDM каждая подполоса ассоциирована с соответствующей поднесущей, которая может быть модулирована данными. До K символов модуляции можно передавать по K подполосам в каждом периоде OFDM-символа.
В OFDM-системе передатчик в типичном варианте преобразует символы модуляции для каждого периода OFDM-символа во временную область с помощью K-точечного обратного быстрого преобразования Фурье (IFFT) или обратного дискретного преобразования Фурье (IDFT), чтобы получить K элементарных сигналов временной области. Чтобы преодолевать разброс задержек в канале связи, передатчик повторяет некоторые из K элементарных сигналов, чтобы сформировать OFDM-символ. Повторяемая часть, в общем, называется защитным интервалом или циклическим префиксом. Защитный интервал используется для противодействия межсимвольным помехам (ISI) и помехам между несущими (ICI), вызываемым разбросом задержек, который является разностью времени между путями самого первого и самого последнего поступающего сигнала в приемнике.
Приемник выполняет комплементарную обработку и удаляет защитный интервал в каждом принимаемом OFDM-символе. Затем приемник преобразует K выборок временной области для каждого принимаемого OFDM-символа в частотную область с помощью K-точечного быстрого преобразования Фурье (FFT) или дискретного преобразования Фурье (DFT), чтобы получить K принимаемых символов для K подполос. После этого приемник выполняет обнаружение принимаемых символов, чтобы восстановить передаваемые символы модуляции. Приемник в типичном варианте поддерживает контур временного отслеживания, который определяет надлежащее размещение FFT-окна для каждого принимаемого OFDM-символа. FFT-окно указывает то, какие выборки должны быть сохранены, а какие выборки должны быть отброшены. На эффективность обнаружения данных сильно влияет размещение FFT-окна.
Следовательно, существует потребность в данной области техники в методах для выполнения временного отслеживания в приемнике, чтобы достигать точного размещения FFT-окна.
Сущность изобретения
В данном документе описываются методы для выполнения временного отслеживания в приемнике. Оценка импульсной характеристики канала связи может быть выведена, к примеру, на основе принимаемого пилот-сигнала. Первый путь прихода (FAP) и последний путь прихода (LAP) могут быть обнаружены на основе оценки импульсной характеристики канала. FAP и LAP могут быть корректно обнаружены, и обнаруженные FAP и LAP могут быть истинными FAP и LAP соответственно. Однако если разброс задержек канала связи чрезмерный, то FAP и LAP могут быть некорректно обнаружены, и обнаруженные FAP и LAP могут быть подменены и могут соответствовать истинным LAP и FAP соответственно.
Чтобы разрешить неоднозначность в обнаруженных FAP и LAP, могут быть оценены две гипотезы. Первая гипотеза может соответствовать корректному обнаружению FAP и LAP, а вторая гипотеза может соответствовать некорректному обнаружению FAP и LAP. Для каждой гипотезы гипотетические FAP и LAP определяются на основе обнаруженных FAP и LAP, и окно корреляции определяется на основе гипотетических FAP и LAP. Окно корреляции для каждой гипотезы может охватывать весь или часть защитного интервала для гипотетического FAP и/или весь или часть защитного интервала для гипотетического LAP. Для каждой гипотезы корреляция может быть осуществлена между первым сегментом принимаемых данных в рамках окна корреляции и вторым сегментом принимаемых данных, который может отстоять на K выборок, где K - это продолжительность полезной части OFDM-символа. Корректная гипотеза может быть определена на основе результатов корреляции для двух гипотез. Синхронизация в приемнике может обновляться на основе гипотетических FAP и LAP для корректной гипотезы. OFDM-демодуляция может выполняться на основе обновленной синхронизации приемника, к примеру, FFT-окно может точно размещаться на основе синхронизации приемника.
Далее подробно описаны различные аспекты и варианты осуществления изобретения.
Краткое описание чертежей
Признаки и характер настоящего изобретения должны стать более очевидными из изложенного ниже подробного описания, рассматриваемого вместе с чертежами, на которых одинаковые символы ссылок определяются соответствующим образом по всему документу.
Фиг.1 иллюстрирует блок-схему передатчика и приемника.
Фиг.2 иллюстрирует блок-схему OFDM-модулятора в передатчике.
Фиг.3 иллюстрирует блок-схему OFDM-демодулятора в приемнике.
Фиг.4 иллюстрирует блок-схему контура временного отслеживания в приемнике.
Фиг.5A-5F иллюстрируют обнаружение FAP и LAP для двух примерных оценок импульсных характеристик канала.
Фиг.6A-6D иллюстрируют топологии каналов и импульсных характеристик канала для двух примерных рабочих сценариев.
Фиг.7A-7C иллюстрируют возможные решения посредством детектора FAP и LAP.
Фиг.8A-8D иллюстрируют вариант осуществления разрешения неоднозначности при обнаружении FAP и LAP посредством корреляции данных OFDM-символа.
Фиг.9 иллюстрирует окна корреляции, используемые для того, чтобы разрешать неоднозначность FAP и LAP.
Фиг.10 иллюстрирует процесс разрешения неоднозначности в обнаруженных FAP и LAP.
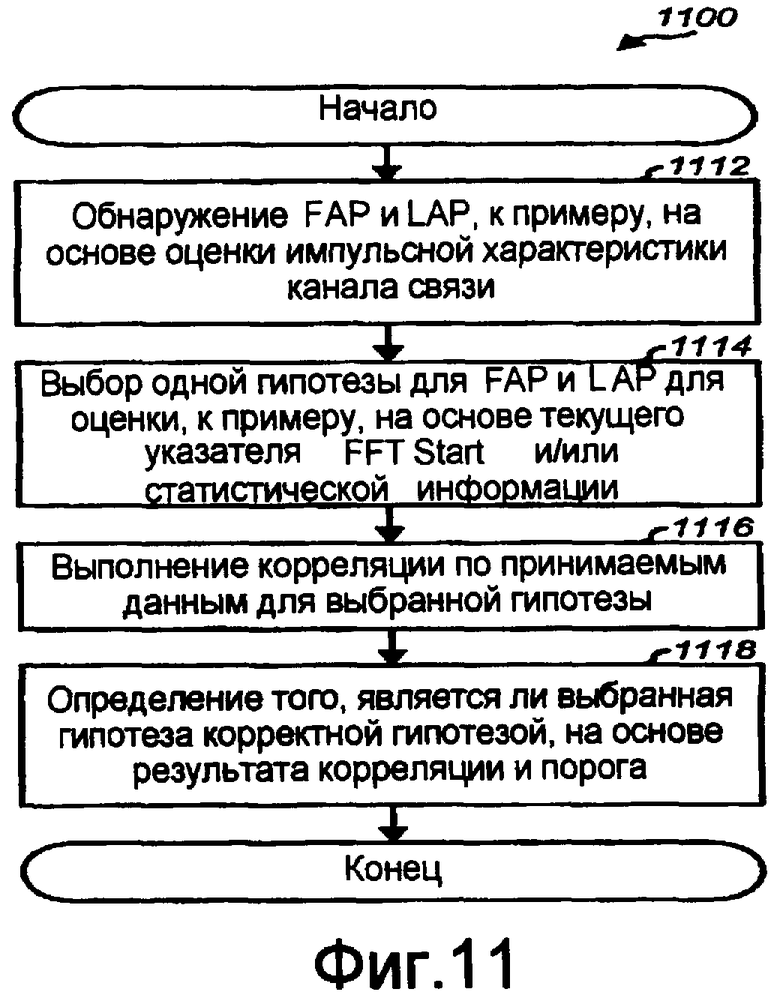
Фиг.11 иллюстрирует еще один процесс разрешения неоднозначности в обнаруженных FAP и LAP.
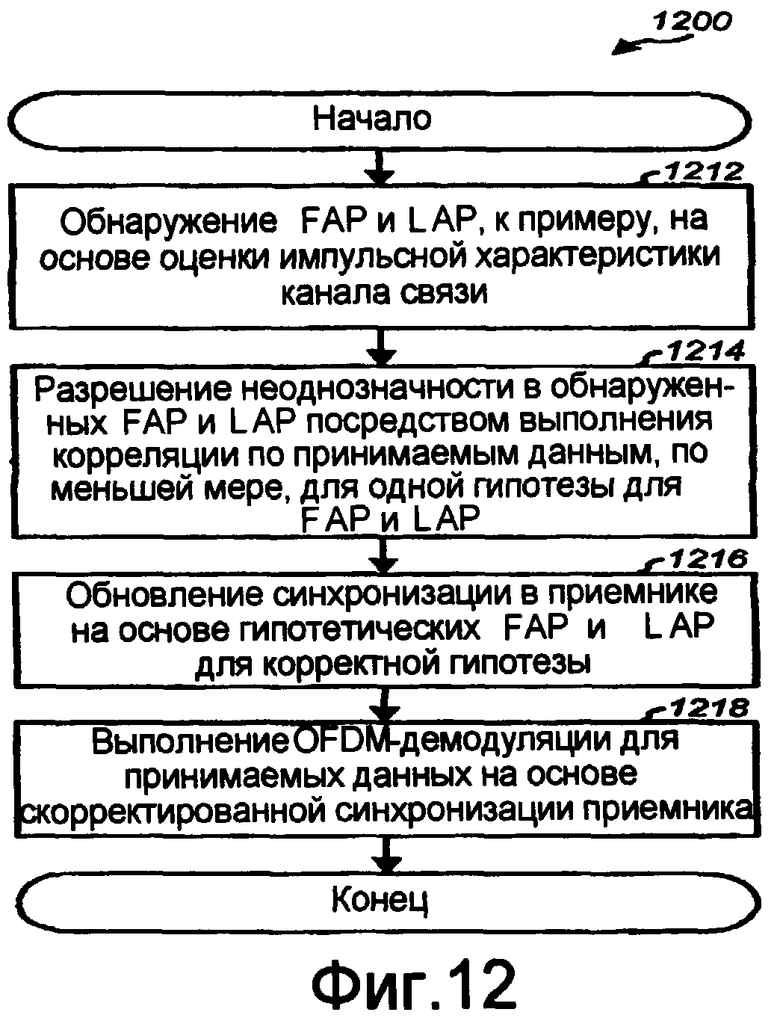
Фиг.12 иллюстрирует процесс выполнения временного отслеживания в приемнике.
Подробное описание изобретения
Слово "примерный" используется в данном документе, чтобы обозначать "служащий в качестве примера, отдельного случая или иллюстрации". Любой вариант осуществления или структура, описанные в данном документе как "примерные", не обязательно должны быть истолкованы как предпочтительные или выгодные по сравнению с другими вариантами осуществления или структурами.
Методы временного отслеживания, описываемые в данном документе, могут быть использованы для различных систем связи, таких как OFDM-система, система множественного доступа с ортогональным частотным разделением каналов (OFDMA), система множественного доступа с частотным разделением каналов с одной несущей (SC-FDMA) и т.д. OFDMA-система использует OFDM. SC-FDMA-система может использовать перемеженный FDMA (IFDMA), чтобы передавать подполосы, которые распределены по ширине полосы системы, локализованный FDMA (LFDMA), чтобы передавать в блоке соседних подполос, или улучшенный FDMA (EFDMA), чтобы передавать в множестве блоков соседних подполос. В общем, символы модуляции передаются в частотной области при OFDM и во временной области при SC-FDMA. SC-FDMA-символ включает в себя защитный интервал, который формируется таким же образом, что и защитный интервал для OFDM-символа. Для простоты методы временного отслеживания описываются ниже для OFDMA-системы.
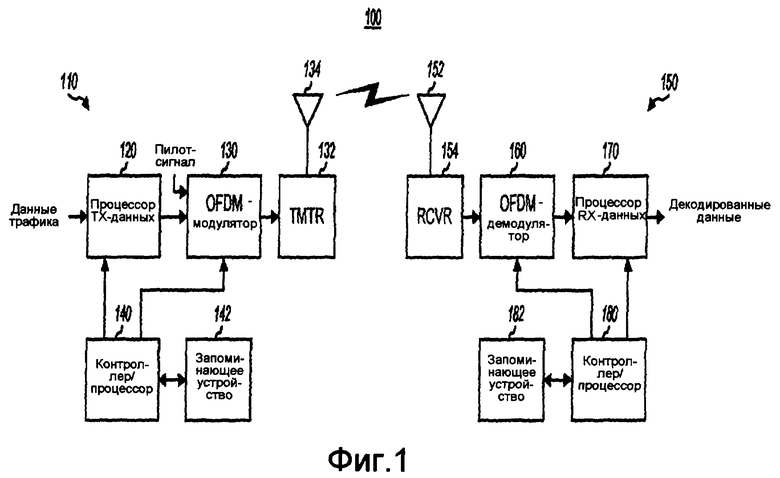
Фиг.1 иллюстрирует блок-схему передатчика 110 и приемника 150 в OFDM-системе 100. В передатчике 110 процессор 120 данных передачи (TX) обрабатывает (к примеру, форматирует, кодирует, перемежает и отображает на символы) данные трафика и формирует символы данных. При использовании в данном документе символ данных - это символ модуляции для данных трафика, пилотный символ - это символ модуляции для пилот-сигнала, которым являются данные, которые априорно известны передатчику и приемнику, а нулевой символ - это значение сигнала, равное нулю.
OFDM-модулятор 130 принимает и мультиплексирует символы данных и пилотные символы в подполосы данных и пилот-сигналов, выполняет OFDM-модуляцию, как описано выше, и предоставляет OFDM-символ для каждого периода OFDM-символа. Период OFDM-символа - это продолжительность одного OFDM-символа, также упоминаемая как период символа. Передающее устройство (TMTR) 132 принимает и обрабатывает (к примеру, преобразует в аналоговую форму, усиливает, фильтрует и преобразует с повышением частоты) OFDM-символы и формирует модулированный сигнал, который передается посредством антенны 134 в приемник 150.
В приемнике 150 антенна 152 принимает модулированный сигнал из передатчика 110 и предоставляет принятый сигнал в приемное устройство (RCVR) 154. Приемное устройство 154 преобразует (к примеру, фильтрует, усиливает, преобразует с понижением частоты и оцифровывает) принимаемый сигнал и предоставляет принятые выборки. OFDM-демодулятор (Demod) 160 обрабатывает принятые выборки так, как описано выше, и получает K принятых символов для K подполос в каждом периоде OFDM-символа. Принятые символы включают в себя принятые символы данных для подполос данных и принятые пилотные символы для подполос пилот-сигнала. OFDM-демодулятор 160 выполняет временное отслеживание, чтобы надлежащим образом разместить FFT-окно для каждого периода OFDM-символа. OFDM-демодулятор 160 также выполняет демодуляцию/обнаружение данных по принятым символам данных с помощью оценки канала, чтобы получить оценки символов данных, которые являются оценками символов данных, переданных передатчиком 110. Процессор 170 данных приема (RX) далее обрабатывает (к примеру, выполняет обратное отображение символов, обратное перемежение и декодирование) оценки символов данных, чтобы получить декодированные данные. В общем, обработка посредством OFDM-демодулятора 160 и процессора 170 RX-данных комплементарна обработке посредством OFDM-модулятора 130 и процессора 120 TX-данных соответственно в передатчике 110.
Контроллеры/процессоры 140 и 180 также управляют работой различных устройств обработки в передатчике 110 и приемнике 150 соответственно. Запоминающие устройства 142 и 182 сохраняют данные и программные коды для передатчика 110 и приемника 150 соответственно.
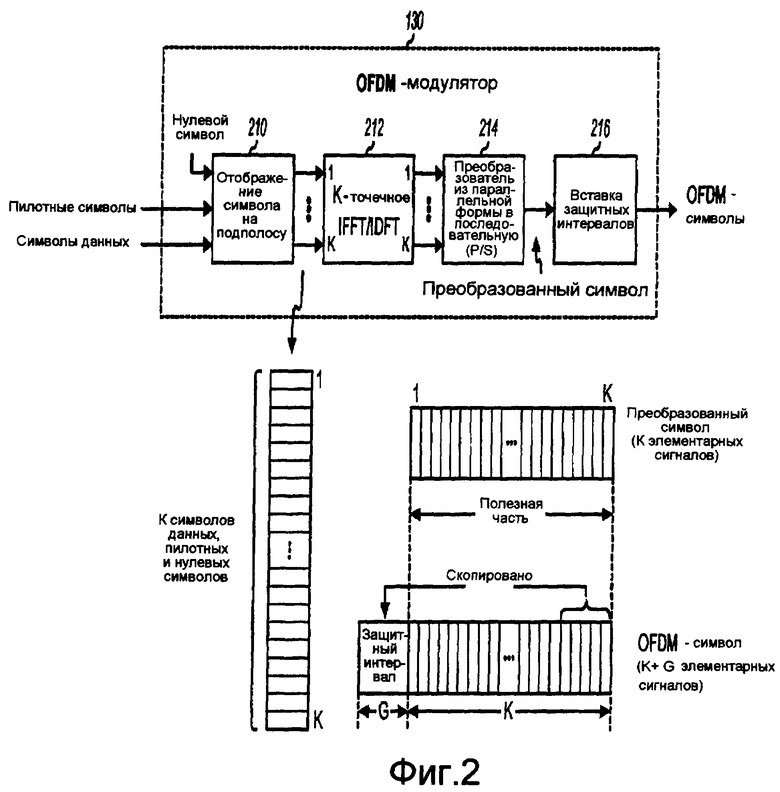
Фиг.2 иллюстрирует блок-схему OFDM-модулятора 130 в передатчике 110 на фиг.1. В OFDM-модуляторе 130 блок 210 отображения символа на подполосу принимает и отображает данные и пилотные символы на подполосы, используемые для данных и пилот-сигналов соответственно, отображает нулевые символы на неиспользуемые подполосы и предоставляет K символов передачи всего для K подполос. Каждый символ передачи может быть символом данных, пилотным символом или нулевым символом в каждом периоде OFDM-символа. Для каждого периода OFDM-символа блок 212 преобразует K символов передачи во временную область в помощью K-точечного IFFT/IDFT и предоставляет преобразованный символ, который содержит K элементарных сигналов временной области. Каждый элементарный сигнал является комплексным значением, которое должно передаваться в одном периоде элементарного сигнала. Преобразователь 214 из параллельной формы в последовательную (P/S) преобразует в последовательную форму K элементарных сигналов для каждого преобразованного символа. Блок 216 вставки защитных интервалов далее повторяет часть (или G элементарных сигналов) каждого преобразованного символа, чтобы сформировать OFDM-символ, который содержит K+G элементарных сигналов. Каждый OFDM-символ содержит K элементарных сигналов для полезной части и G элементарных сигналов для защитного интервала. Защитный интервал используется для противодействия помехам ISI и ICI, вызываемым разбросом задержек в канале связи. Длина защитного интервала, G, определяет наибольший разброс задержек, который может допускать приемник, не подвергаясь помехам ISI и ICI при умеренной скорости движения.
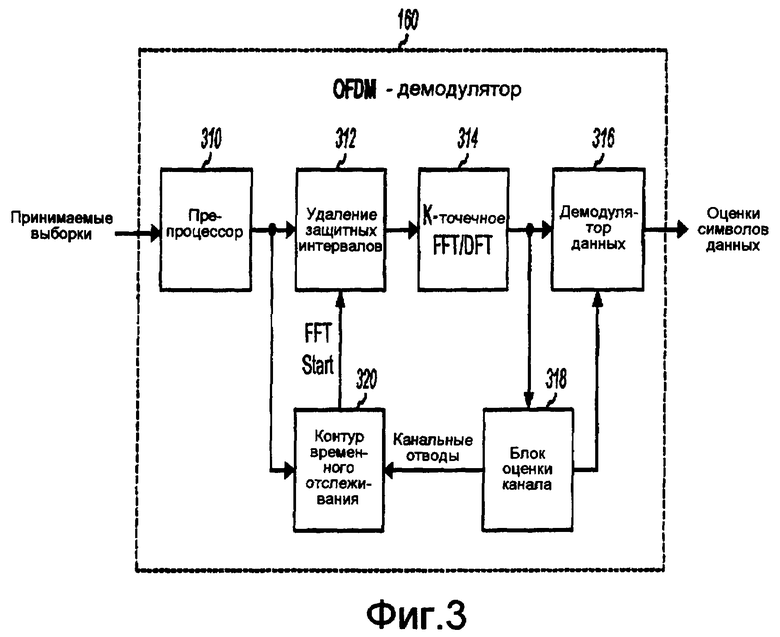
Фиг.3 иллюстрирует блок-схему варианта осуществления OFDM-демодулятора 160 в приемнике 150 на фиг.1. В OFDM-демодуляторе 160 препроцессор 310 обрабатывает принимаемые выборки из приемного устройства 154 и предоставляет входные выборки. Препроцессор 310 может выполнять автоматическую регулировку усиления (AGC), вхождение в синхронизм по времени, фильтрацию, преобразование частоты выборки, удаление сдвига постоянного тока (DC), оценку и удаление частотных ошибок и/или другие функции. Блок 312 удаляет защитный интервал в каждом принимаемом OFDM-символе на основе указателя FFT Start и предоставляет K входных выборок для этого OFDM-символа. Указатель FFT Start управляет размещением FFT-окна для каждого принимаемого OFDM-символа.
Для каждого принимаемого OFDM-символа блок 314 выполняет K-точечное FFT/DFT для K входных выборок и предоставляет K принятых символов частотной области всего для K подполос. Блок 318 оценки канала извлекает оценку канала на основе принимаемых пилотных символов. Оценкой канала может быть оценка импульсной характеристики канала временной области и/или оценка импульсной характеристики канала частотной области. Демодулятор 316 данных выполняет демодуляцию/обнаружение данных для принимаемых символов данных с помощью оценки канала и предоставляет оценки символов данных.
Контур 320 временного отслеживания выполняет временное отслеживание так, как описано ниже, определяет синхронизацию для каждого принимаемого OFDM-символа и предоставляет указатель FFT Start. Хотя не показано на фиг.3 для простоты, OFDM-демодулятор 160 может включать в себя блоки обработки для обнаружения кадров, синхронизации кадров, частотного отслеживания и/или других функций.
Блок 318 оценки канала, контур 320 временного отслеживания и другие блоки в OFDM-демодуляторе 160 могут выполнять обработку на частоте дискретизации. Эти блоки также могут прореживать выборки и выполнять обработку при меньшей частоте, чтобы снизить вычислительную сложность. Эти блоки также могут выполнять избыточную дискретизацию принимаемого сигнала и выполнять обработку при большей частоте дискретизации, чтобы добиться лучшего разрешения. Для простоты в нижеприведенном описании предполагается обработка при частоте дискретизации, и различные количества, константы и пороги предоставлены для обработки при частоте дискретизации.
Приемник может выполнять временное отслеживание различными способами и на основе различных типов информации, передаваемой передатчиком. Например, передатчик может передавать пилот-сигнал по N подполосам, которые равномерно распределены по всем K подполосам, где 1<N<K. Приемник может принимать OFDM-символ, содержащий пилот-сигнал, удалять защитный интервал и выполнять K-точечное FFT/DFT для полезной части принимаемого OFDM-символа, чтобы получить N принимаемых пилотных символов для N подполос пилот-сигналов. Приемник после этого может удалять модуляцию для N принимаемых пилотных символов и может выполнять N-точечное IFFT/IDFT для N усилений канала, чтобы получить оценку импульсной характеристики канала, содержащую N канальных отводов, которые могут быть обозначены как h n для n=0, …, N-1. Приемник также может извлекать оценку импульсной характеристики канала другими способами, известными в данной области техники. В варианте осуществления, который описывается ниже, приемник выполняет временное отслеживание на основе оценки импульсной характеристики канала.
Фиг.4 иллюстрирует блок-схему варианта осуществления контура 320 временного отслеживания на фиг.3. В контуре 320 временного отслеживания блок 410 принимает N канальных отводов для оценки импульсной характеристики канала из блока 318 оценки канала и вычисляет квадрат величины каждого канального отвода. Блок 410 также может фильтровать квадратичные величины канальных отводов по множеству периодов символа. Блок 410 предоставляет профиль мощности канала, содержащий N значений (фильтрованных или нефильтрованных) квадратичных величин для N канальных отводов. Детектор 412 обнаруживает первый путь прихода (FAP) и последний путь прихода (LAP) на основе профиля мощности канала и предоставляет обнаруженные FAP и LAP, как описано ниже. Блок 414 разрешает неоднозначность в обнаруженных FAP и LAP и предоставляет выходные FAP и LAP. Детектор 416 центра масс (CM) определяет центр масс профиля мощности канала на основе выходных FAP и LAP. Сумматор 418 вычитает цель синхронизации из обнаруженного центра масс и предоставляет ошибку синхронизации. Цель синхронизации - это целевая позиция FFT-окна, и она может быть программируемым значением. Ошибка синхронизации указывает ошибку между обнаруженным центром масс и целевой позицией FFT-окна.
Контурный фильтр 420 фильтрует ошибку синхронизации и предоставляет корректировку синхронизации. Для варианта осуществления, показанного на фиг.4, контурный фильтр 420 реализует фильтр нижних частот первого порядка. Умножитель 422 умножает ошибку синхронизации на усиление. Сумматор 424 суммирует выходной сигнал умножителя 422 с выходным сигналом блока 426 задержки и предоставляет корректировку синхронизации. Блок 426 задержки сохраняет выходной сигнал сумматора 424 для следующего обновления контура. Другие структуры и/или другие передаточные функции также могут быть использованы для контурного фильтра 420. Ограничитель 430 ограничивает корректировку синхронизации рамками заранее определенного диапазона значений и предоставляет выходной сигнал опережения/замедления (Adv/Ret), который указывает, насколько должно быть смещено FFT-окно. Сумматор 434 суммирует выходной сигнал опережения/замедления с текущим указателем FFT Start из блока 436 задержки и предоставляет обновленный указатель FFT Start. Блок 436 задержки сохраняет обновленный указатель FFT Start для следующего обновления контура.
Детектор 412 может обнаруживать FAP и LAP различными способами. Для простоты ниже описана конкретная схема обнаружения FAP и LAP на основе профиля мощности канала. В этой схеме энергия всех канальных отводов в рамках скользящего окна сначала вычисляется для различных позиций отводов следующим образом:

где E k - это энергия канальных отводов в скользящем окне в позиции отвода k, W - это ширина скользящего окна, а mod N означает операцию взятия N по модулю.
Ширина скользящего окна может выбираться так, чтобы быть меньше или равной половине длины оценки импульсной характеристики канала, или W≤N/2. Оценка импульсной характеристики канала в типичном варианте меньше или равна защитному интервалу, или N≤G. Это обусловлено тем, что защитный интервал в типичном варианте выбирается так, чтобы быть больше разброса задержек в канале, чтобы не допускать ISI и ICI. Уравнение (1) по сути перемещает скользящее окно круговым способом по профилю мощности канала, и для каждой позиции отвода k вычисляет энергию W канальных отводов в рамках скользящего окна. Скользящее окно циклически "заворачивается" к началу профиля мощности канала по достижении конца профиля мощности канала.
Конечная разность после этого вычисляется для каждой позиции отвода на основе энергий отвода следующим образом:

где Q - это порядок конечной разности, и D n - это значение конечной разности для позиции отвода n.
Скользящее окно длины 2Q используется для того, чтобы вычислять конечную разность. Скользящее окно перемещается круговым способом по профилю мощности канала. Для каждой позиции n отвода конечная разность D n вычисляется как разность между комбинированными энергиями в первой половине скользящего окна минус комбинированные энергии во второй половине скользящего окна.
Два показателя, используемые для того, чтобы обнаруживать FAP и LAP, могут быть определены на основе энергий отводов и значений конечной разности следующим образом:


где α1 и α2 - это коэффициенты, используемые для обнаружения FAP и LAP соответственно, S FAP (k) - это показатель для обнаружения FAP в позиции k отвода, а S LAP (k) - это показатель для обнаружения LAP в позиции k отвода.
Коэффициент α1 определяет чувствительность обнаружения FAP и может быть выбран таким образом, что FAP обнаруживается, если это последнее большое значение перед падением в зоне накопленной энергии вблизи максимума. Аналогично коэффициент α2 определяет чувствительность обнаружения LAP и может быть выбран таким образом, что LAP обнаруживается, если это первое большое значение перед подъемом в зоне накопленной энергии вблизи максимума. Коэффициенты α1 и α2 могут выбираться так, чтобы предоставлять хорошую характеристику обнаружения FAP и LAP соответственно, и могут быть определены на основе компьютерного моделирования, эмпирических измерений и т.д.
Местоположение FAP может быть определено на основе S FAP (k) следующим образом:

где FAPd - это индекс для обнаруженного FAP достаточной длины. В уравнении (5) наибольше значение S FAP (k) сначала идентифицируется, и FAPd устанавливается на индекс, который дает наибольшее значение для S FAP (k).
Местоположение LAP может быть определено на основе S LAP (k) следующим образом:


где LAPd - это индекс для обнаруженного LAP достаточной длины. В уравнениях (6) и (7) сначала идентифицируется наименьшее значение S LAP (k), индекс, который дает наименьшее значение S FAP (k), обозначается k min , и LAPd устанавливается на W-1 позиций отводов вправо от k min. Операция mod N в уравнении (7) ограничивает LAPd так, чтобы быть в диапазоне от 0 до N-1. В последующем описании FAP и LAP обозначают фактический FAP и LAP соответственно, а FAPd и LAPd обозначают обнаруженный FAP и LAP соответственно.
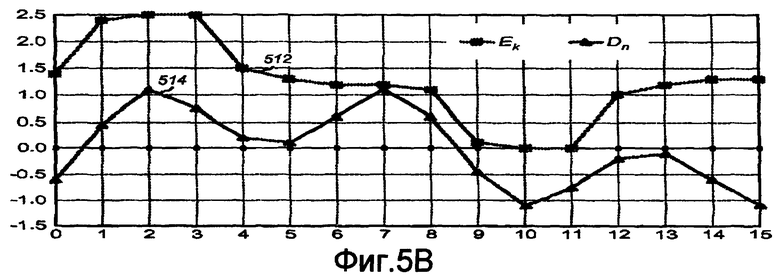
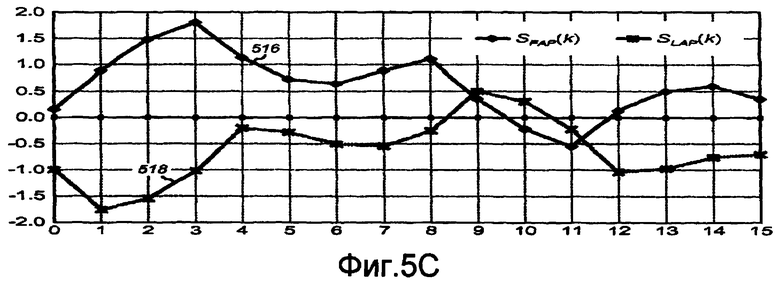
Фиг.5A-5C иллюстрируют обнаружение FAP и LAP для примерной оценки импульсной характеристики канала. В этом примере N=16, и оценка импульсной характеристики канала содержит два больших канальных отвода в позициях 3 и 8 отвода, как показано на фиг.5A. Фиг.5B иллюстрирует график 512 энергии E k и график 514 конечной разности D n (при W=8 и Q=2) для оценки импульсной характеристики канала, показанной на фиг.5A. Фиг.5C иллюстрирует график 516 показателя S FAP(k) и график 518 показателя S LAP(k) при α1=α2 = 0,5.
Как показано на фиг.5B, FAP может быть установлен посредством обнаружения для спадающего фронта на графике 512 для энергии E k, которая в свою очередь может быть установлена посредством обнаружения для пика на графике 514 для конечной разности D n. Операция конечной разности для D n может повысить шум. Следовательно, взвешенная сумма конечной разности D n и энергии E k может быть использована в качестве показателя S FAP(k). Аналогично LAP может быть установлен посредством обнаружения для нарастающего фронта на графике 512 для энергии E k, которая в свою очередь может быть установлена посредством обнаружения минимума на графике 514 для конечной разности D n. Взвешенная сумма конечной разности D n и энергии E k может быть использована в качестве показателя S LAP(k), чтобы смягчить эффекты повышения шума. В примере, показанном на фиг.5A-5C, наибольшее значение S FAP(k) достигается при индексе k=3, и FAP обнаруживается как FAPd=3. Наименьшее значение S LAP(k) достигается при индексе k=1, и LAP обнаруживается как LAPd=1+8-1=8.
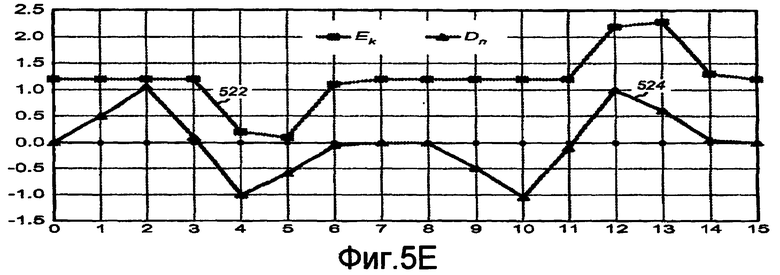
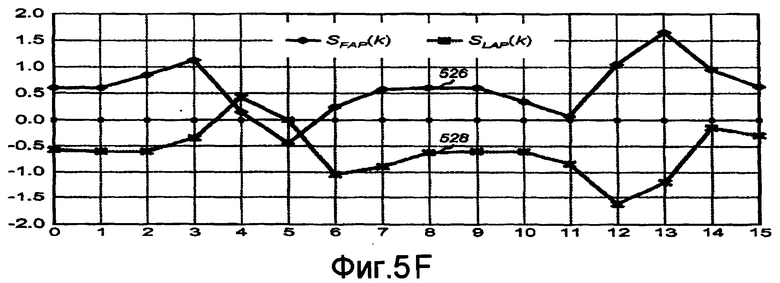
Фиг.5D-5F иллюстрируют обнаружение FAP и LAP для другой примерной оценки импульсной характеристики канала, содержащей два больших канальных отвода в позициях 3 и 13 отвода. Фиг.5E иллюстрирует график 522 энергии E k и график 524 конечной разности D n . Фиг.5F иллюстрирует график 526 показателя S FAP(k) и график 528 показателя S LAP(k). В примере, показанном на фиг.5D-5F, наибольшее значение S FAP(k) достигается при индексе k=13, и FAP обнаруживается как FAPd=13. Наименьшее значение S LAP(k) достигается при индексе k=12, и LAP обнаруживается как LAPd=(12+8-1)mod16=3.
Для простоты выше описана конкретная схема обнаружения FAP и LAP. Эта схема может предоставлять ошибочные FAP и/или LAP при определенных условиях. Например, если длина скользящего окна меньше разброса задержек в канале, то может быть возможным выбрать средний путь канала в качестве вероятного варианта для FAP или LAP. Более того, в зависимости от относительных позиций путей канала и/или их относительных мощностей эта схема обнаружения при W=N/2 может обнаруживать различных кандидатов для FAP и LAP. Ошибочного обнаружения FAP и LAP можно избежать, к примеру, в предположении, что предыдущий центр масс был корректно размещен относительно заранее определенной точки Dmid. Тогда для текущей оценки канала начальное решение может быть принято в отношении того, какой путь сигнала появляется позже Dmid, и какой путь сигнала поступает до Dmid, но смешан в оценку канала ранее. При условии, что содержимое канала с равной степенью вероятности появляется как рано, так и поздно, точка отсечки между прошлым и будущим может быть установлена на Dmid +N/2, и любой канальный отвод после этой точки отвода предполагается поступившим ранее, но смешивается. Отметим, что содержимое канала могло ранее иметься только до Dmid+max{Δh}/2, где Δh - это разброс задержек в канале. Зона между Dmid+max{Δh}/2 и Dmid+N/2 представляет зону поиска для позднего содержимого канала. В общем, обнаружение FAP и LAP может выполняться различными способами и учитывать различные состояния канала.
Схема обнаружения FAP и LAP, описанная выше в уравнениях (1)-(7), предоставляет относительно точно обнаруженные FAP и LAP, когда разброс задержек в канале Δh меньше или равен половине защитного интервала, или Δh≤G/2. Тем не менее, когда разброс задержек больше половины защитного интервала, решения могут быть переставлены, так что LAPd=FAP, а FAPd=LAP. Следовательно, обнаруженный FAP может быть или не быть истинным FAP, а обнаруженный LAP может быть или не быть истинным LAP. Точность решений FAPd и LAPd зависит от фактических канальных отводов, разброса задержек в канале и, возможно, других факторов. Поэтому желательно достигать точного обнаружения FAP и LAP.
FAP и LAP также могут быть обнаружены другими способами. Независимо от схемы, используемой для обнаружения FAP и LAP, может иметься неоднозначность в отношении того, являются обнаруженные FAP и LAP корректными или переставленными.
Неоднозначность в обнаружении FAP и LAP может быть разрешена посредством использования взаимосвязи между началом FFT-окна (которое указывается посредством указателя FFT Start) и результирующим профилем канальной задержки. В частности, местоположения FAP и LAP в оценке импульсной характеристики канала зависят от (1) задержек распространения для FAP и LAP и (2) размещения FFT-окна. Эта взаимосвязь проиллюстрирована посредством двух примеров ниже.
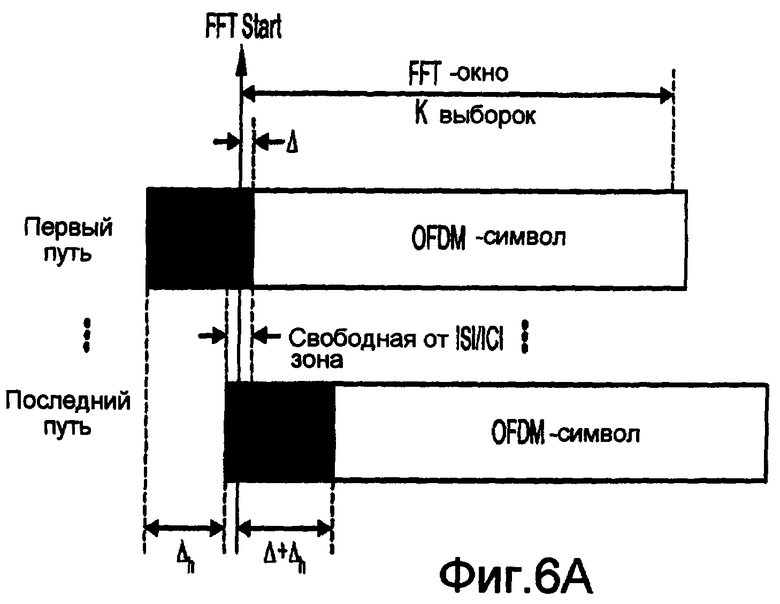
Фиг.6A иллюстрирует примерную передачу OFDM-символа через канал связи с несколькими путями сигнала. В общем, каждый путь сигнала может иметь любое комплексное усиление и задержку распространения, которые определяются канальной средой. Для простоты усиления для FAP и LAP считаются равными в этом примере. Разброс задержек канала связи равен Δh, т.е. разности между задержками распространения для FAP и LAP.
OFDM-символ включает в себя полезную часть и защитный интервал. Приемник получает копию OFDM-символа через каждый путь сигнала. Каждая копия OFDM-символа масштабируется посредством комплексного усиления для ассоциированного пути сигнала и дополнительно задерживается на задержку распространения в этом пути сигнала. Для простоты фиг.6A иллюстрирует только копию первого OFDM-символа, принятую посредством FAP, и копию последнего OFDM-символа, принятую посредством LAP. Начало копии последнего OFDM-символа задерживается на Δh выборок от начала копии первого OFDM-символа. Принимаемый OFDM-символ - это наложение копий всех OFDM-символов в приемнике.
Фиг.6A также иллюстрирует размещение FFT-окна для OFDM-символа. Начало FFT-окна указывается посредством указателя FFT Start. FFT-окно имеет ширину в K выборок и определяет то, какие выборки выбраны для последующей обработки. В примере, показанном на фиг.6A, начало FFT-окна отстоит на Δ выборок от первой выборки в полезной части копии OFDM-символа для FAP и на Δ+Δh выборок от первой выборки в полезной части копии OFDM-символа для LAP.
Фиг.6A также иллюстрирует свободную от ISI/ICI зону, которая является перекрывающейся зоной для защитных интервалов по всем копиям OFDM-символов в приемнике. Если указатель FFT Start находится в свободной от ISI/ICI зоне, то соответствующие K выборок выбираются для обработки, и ISI и ICI не принимаются в расчет, что является желательным. Цель контура 320 временного отслеживания заключается в том, чтобы удерживать указатель FFT Start в свободной от ISI/ICI зоне.
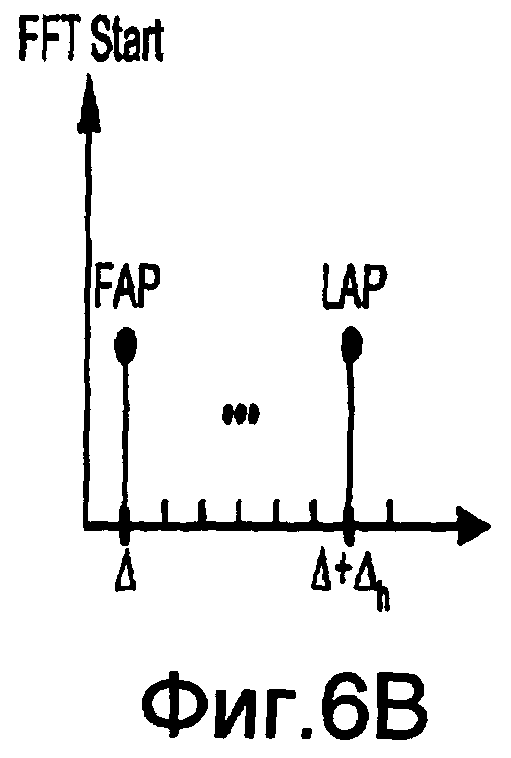
Фиг.6B иллюстрирует оценку импульсной характеристики канала для примерной передачи, показанной на фиг.6A. Импульсная характеристика канала связи включает в себя канальный отвод для каждого пути сигнала. Для простоты фиг.6B показывает только два канальных отвода с индексами Δ и Δ+Δh для FAP и LAP соответственно. Величина каждого канального отвода определяется посредством комплексного усиления для ассоциированного пути сигнала. Местоположение или индекс каждого канального отвода определяется задержкой распространения для ассоциированного пути сигнала и указателя FFT Start.
Фиг.6B фактически иллюстрирует профиль задержки в канале связи. Для этого профиля задержки в канале указатель FFT Start отображается в начало отсчета. Усиление канала для каждого пути сигнала отображается на индекс, определяемый посредством расстояния между указателем FFT Start и первой выборкой в полезной части копии OFDM-символа для этого пути сигнала. Профиль задержки в канале включает в себя информацию, которая указывает начало оценки импульсной характеристики канала.
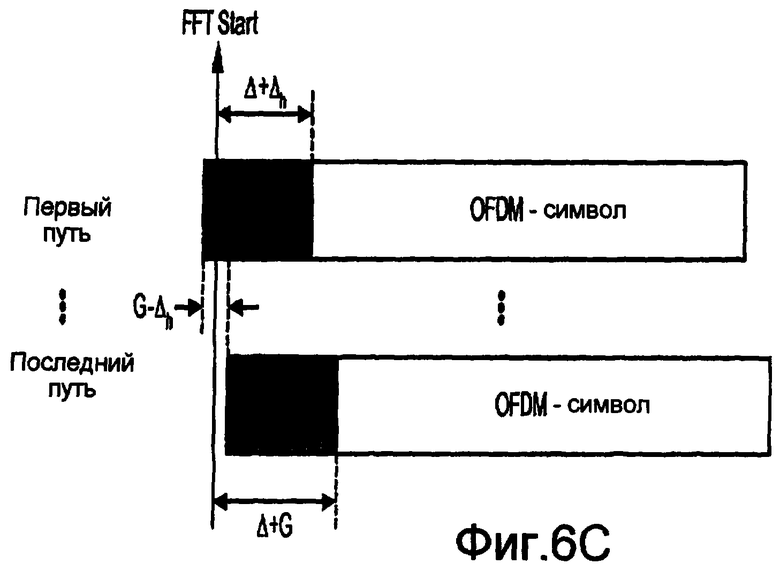
Фиг.6C иллюстрирует еще одну примерную передачу OFDM-символа посредством канала связи с несколькими путями сигнала, имеющего разброс задержек в G-Δh. В примере, показанном на фиг.6C, начало FFT-окна отстоит на Δ+Δh выборок от первой выборки в полезной части копии OFDM-символа для FAP и на Δ+G выборок от первой выборки в полезной части копии OFDM-символа для LAP.
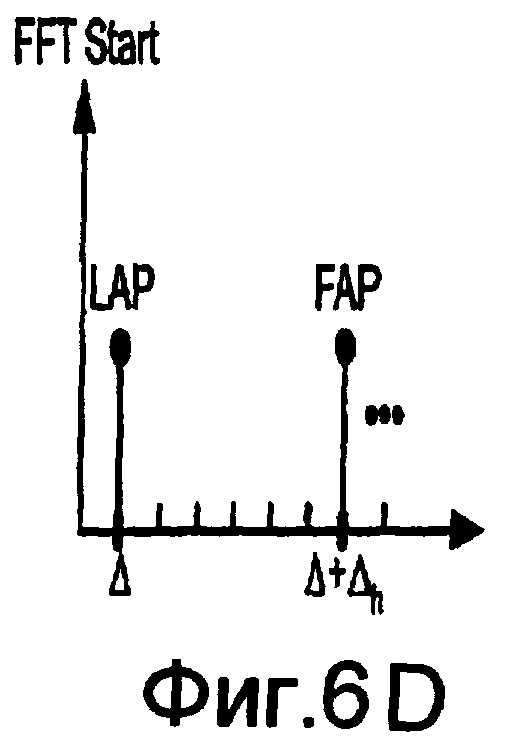
Фиг.6D иллюстрирует оценку импульсной характеристики канала для примерной передачи, показанной на фиг.6C. Оценка импульсной характеристики канала включает в себя два канальных отвода с индексами Δ и Δ+Δh, соответствующими LAP и FAP соответственно. В этом примере первая выборка в полезной части копии OFDM-символа для LAP больше, чем G от начала FFT-окна. Это приводит к циклическому "заворачиванию" канального отвода для LAP и появлению отвода с индексом Δ, который находится слева от канального отвода для FAP.
Как показано на фиг.6A-6D, профиль задержки в канале (к примеру, на фиг.6B или 6D) может быть определен на основе топологии канала (к примеру, на фиг.6A или 6C) и указателя FFT Start. Наоборот, топология канала может быть определена на основе профиля задержки в канале и указателя FFT Start.
На Фиг.6A-6D предполагается, что указатель FFT Start не находится в полезной части OFDM-символа. Данная топология канала также может быть ассоциирована несколькими возможными местоположениями указателя FFT Start. Например, топология канала на фиг.6D также может быть получена с началом FFT-окна на Δ выборок вправо от начала полезной части копии OFDM-символа для FAP, т.е. на G выборок вправо от местоположения указателя FFT Start на фиг.6D. Неопределенность в указателе FFT Start также может тестироваться, чтобы определить корректные FAP и LAP.
Контур 320 временного отслеживания пытается удерживать указатель FFT Start в свободной от ISI/ICI зоне. Контур 320 временного отслеживания пытается достичь этой цели при наличии дрейфа синхронизации, обусловленного разностью между тактовыми частотами в передатчике и приемнике, варьированием тактовых частот во времени, изменениями в канале связи и т.д. Точное обновление указателя FFT Start важно для того, чтобы добиться хорошей характеристики обнаружения данных.
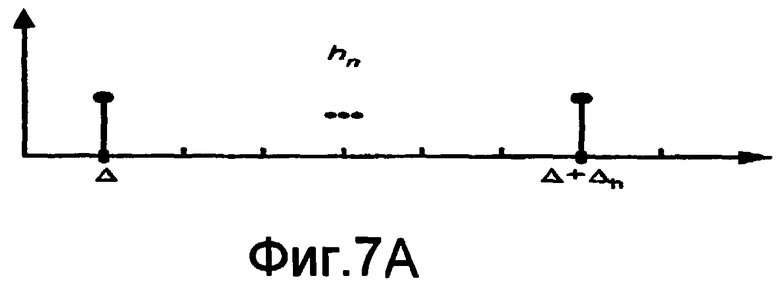
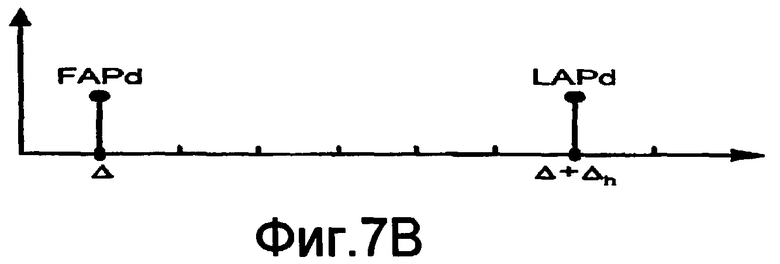
Фиг.7A иллюстрирует примерную оценку импульсной характеристики канала в приемнике. Приемник знает канальный отвод в каждой позиции отвода, но перед временным отслеживанием не знает, где фактически начинается импульсная характеристика канала. Детектор 412 FAP и LAP в контуре 320 временного отслеживания обнаруживает FAP и LAP.
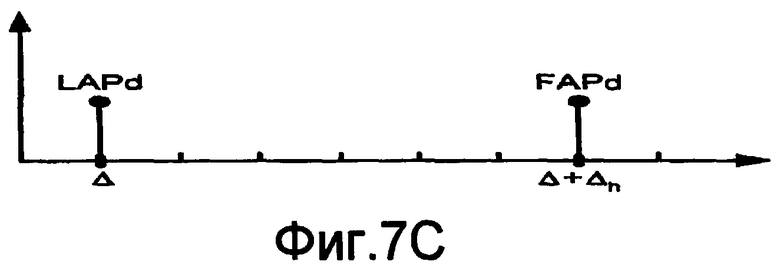
Фиг.7B и 7C иллюстрируют два возможных результата обнаружения FAP и LAP для оценки импульсной характеристики канала, показанной на фиг.7A. Профиль задержки в канале для результата на фиг.7B указывает то, что обнаруженный FAP находится при индексе Δ, а обнаруженный LAP - при индексе Δ+Δh. Профиль задержки в канале для результата на фиг.7C указывает то, что обнаруженный LAP находится при индексе Δ, а обнаруженный FAP - при индексе Δ+Δh.
На основе оценки импульсной характеристики канала, показанной на фиг.7A, детектор 412 FAP и LAP предоставляет обнаруженные FAP и LAP, которые могут быть такими, как показано на фиг.7B или 7C, в зависимости от того, превышает ли разброс задержек Δh предел алгоритма временного отслеживания, модуля и местоположения канальных отводов и, возможно, других факторов. Если фактический профиль задержки в канале такой, как показано на фиг.7B, и решения FAPd и LAPd являются корректными, то топология канала, показанная на фиг.6A, может быть восстановлена на основе взаимосвязи между топологией канала, указателем FFT Start и профилем задержки в канале. Однако если фактический профиль задержки в канале такой, как показано на фиг.7B, и решения FAPd и LAPd являются некорректными, то некорректная топология канала, показанная на фиг.6C, может быть восстановлена.
Указатель FFT Start обновляется различными способами для топологий канала, показанных на фиг.6A и 6C. Следовательно, некорректное обнаружение FAP и LAP приводит к ошибочной интерпретации топологии канала, что приводит к обновлению указателя FFT Start субоптимальным или некорректным образом, что в свою очередь может ухудшить эффективность временного отслеживания и обнаружения данных.
Чтобы разрешить неоднозначность в обнаружении FAP и LAP, приемник может оценить две гипотезы для решений FAPd и LAPd, чтобы определить то, являются эти решения корректными или некорректными. Гипотеза 0 может означать гипотезу, что решения FAPd и LAPd являются корректными, а гипотеза 1 может означать гипотезу, что решения FAPd и LAPd являются некорректными. Для каждой гипотезы приемник может восстановить топологию канала по этой гипотезе посредством применения структуры OFDM-символа и использования взаимосвязи между указателем FFT Start и профилем задержки в канале, как описано выше для фиг.6A-6D. Из восстановленной топологии канала приемник может устанавливать, где находятся защитный интервал и защитная копия, на основе структуры OFDM-символа. Затем приемник может оценить каждую гипотезу и выполнить корреляцию между защитным интервалом и защитной копией. Корректные гипотезы должны давать большую корреляцию и могут быть использованы для того, чтобы корректировать ошибочные решения FAPd и LAPd.
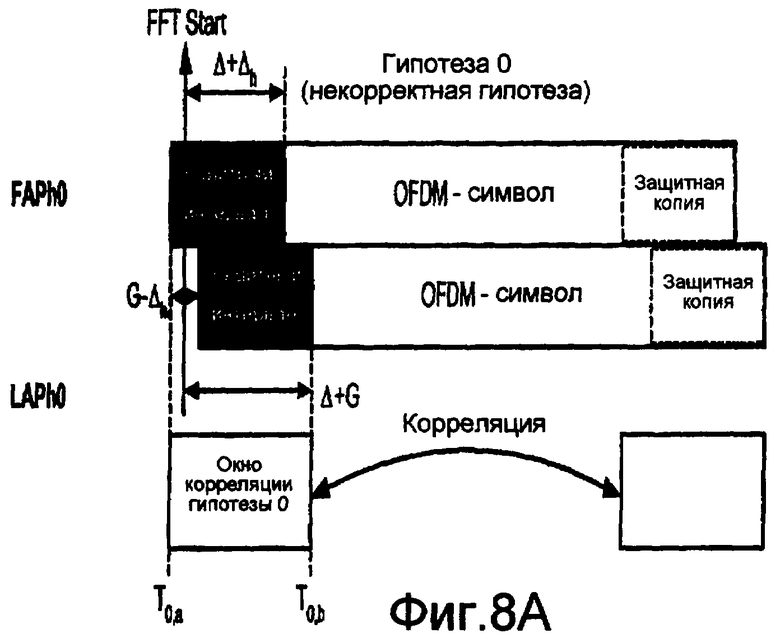
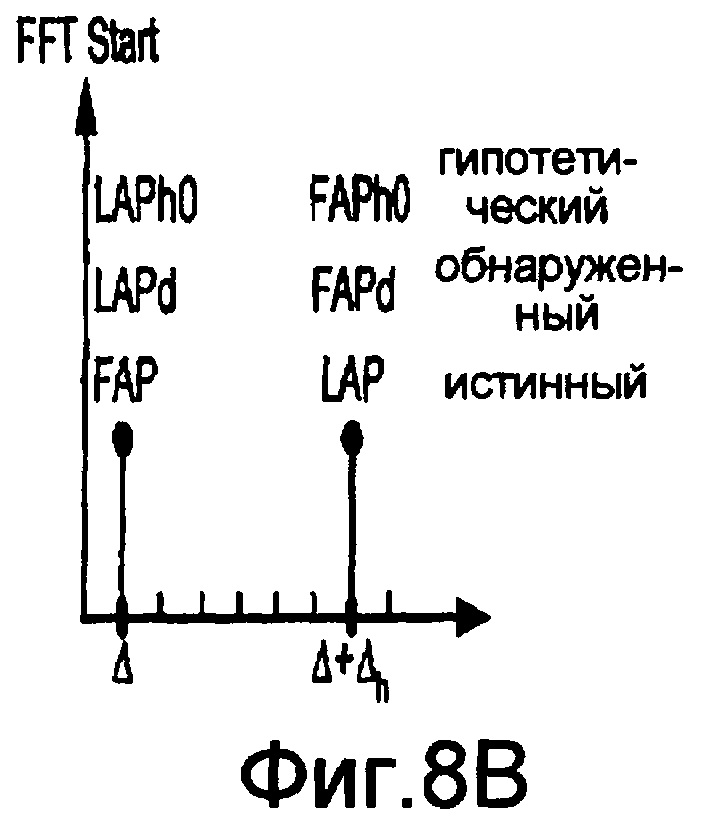
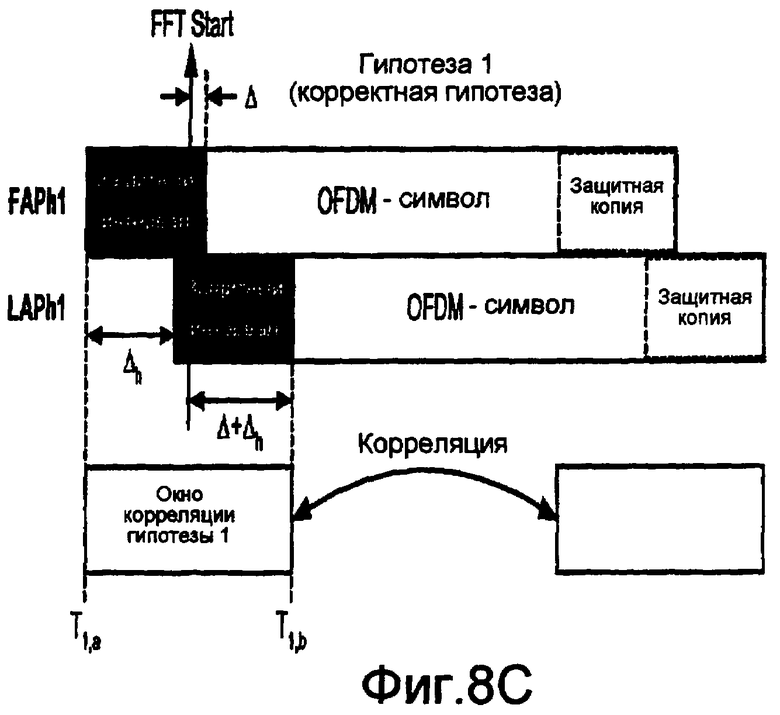
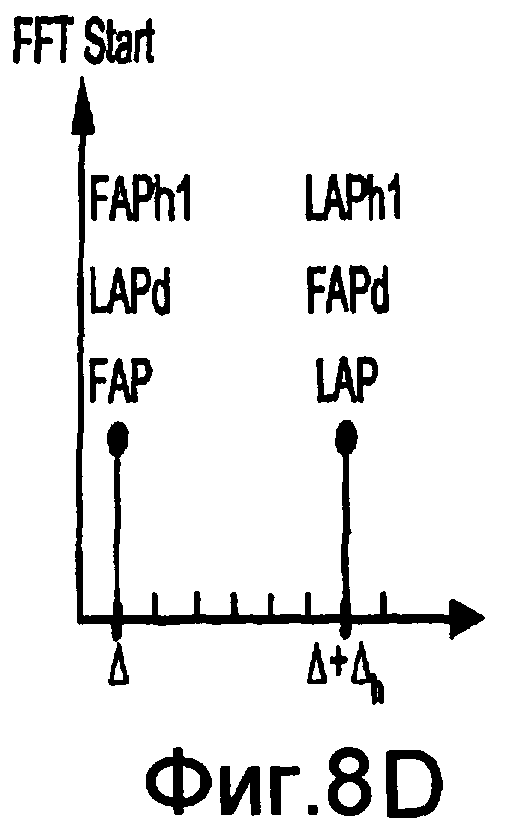
Фиг.8A-8D иллюстрируют вариант осуществления разрешения неоднозначности при обнаружении FAP и LAP посредством корреляции данных OFDM-символа. В этом примере истинные FAP и LAP и обнаруженные FAP и LAP считаются такими, как показано на фиг.8B, и обнаруженные FAP и LAP являются некорректными. В нижеприведенном описании FAPh и LAPh означают гипотетические FAP и LAP соответственно для конкретной гипотезы.
Для гипотезы 0 гипотетические FAP и LAP равны обнаруженным FAP и LAP соответственно, или FAPh0=FAPd и LAPh0=LAPd, как показано на фиг.8B. Топология канала, показанная на фиг.8A, восстанавливается на основе гипотетических FAP и LAP и указателя FFT Start. В варианте осуществления, показанном на фиг.8A-8D, окно корреляции охватывает от первой выборки в защитном интервале копии OFDM-символа для FAP до последней выборки в защитном интервале копии OFDM-символа для LAP. Для гипотезы 0 окно корреляции начинается при индексе выборки T0,a и завершается при индексе выборки T0,b.
Для гипотезы 1 гипотетические FAP и LAP равны обнаруженным FAP и LAP соответственно, или FAPh0=LAPd и LAPh0=FAPd, как показано на фиг.8D. Топология канала, показанная на фиг.8C, восстанавливается на основе гипотетических FAP и LAP, показанных на фиг.8D, и указателя FFT Start. Для гипотезы 1 окно корреляции начинается при индексе выборки T1,a и завершается при индексе выборки T1,b.
Для каждой гипотезы i, начало окна корреляции, Ti,a, может быть определено следующим образом:

где TFAP,i - это местоположение отвода для FAPhi. TFAP,0=Δ+Δh для гипотезы 0, показанной на фиг.8A и 8B, и TFAP,1=Δ для гипотезы 1, показанной на фиг.8C и 8D.
Для каждой гипотезы i конец окна корреляции, Ti,b, может быть определен следующим образом:

где TLAP,i - это местоположение отвода для LAPhi после учета какого-либо эффекта циклического "заворачивания". TLAP,0=Δ+G для гипотезы 0, показанной на фиг.8A и 8B, где G добавлено для того, чтобы учитывать появление LAPh0 слева от FAPh0 вследствие эффекта циклического "заворачивания". TLAP,1=Δ+Δh для гипотезы 1, показанной на фиг.8C и 8D, где G не добавлено, поскольку LAPh1 появляется справа от FAPh1 и нет эффекта циклического "заворачивания".
Размер окна корреляции для каждой гипотезы i может быть вычислен как Ti,b-Ti,a. Как показано на фиг.8A и 8C, окна корреляции для гипотез 0 и 1 в типичном варианте имеют различные размеры.
Корреляция выполняется между защитным интервалом и защитной копией для каждой гипотезы i следующим образом:

где r n - это входная выборка при индексе n выборки для принимаемого OFDM-символа, С i - это результат корреляции для гипотезы i, а "*" означает комплексно-сопряженное число.
Фиг.8A и 8C иллюстрируют защитный интервал, а также защитную копию для каждой копии OFDM-символа. Защитный интервал показан посредством затенения серым, а защитная копия показана с помощью пунктирного прямоугольника. Для каждой копии OFDM-символа защитный интервал является дубликатом защитной копии. Как показано в уравнении (10), каждая выборка в защитном интервале умножается на комплексно-сопряженное число соответствующей выборки в защитной копии, и результаты умножения накапливаются по длине окна корреляции. Деление на (Ti,b-Ti,a) в уравнении (10) учитывает различные размеры окон корреляции, используемые посредством гипотез 0 и 1, и приводит к нормализованному результату корреляции.
Если гипотетические FAP и LAP являются истинными FAP и LAP, как показано на фиг.8D, то окно корреляции охватывает защитный интервал и защитную копию передаваемого OFDM-символа, как показано на фиг.8C. Топология канала для фактической гипотезы в таком случае приводит к результату более высокой корреляции между защитным интервалом и защитной копией, поскольку эти секции переносят одинаковую форму сигнала из передатчика. Если гипотетические FAP и LAP не являются истинными FAP и LAP, как показано на фиг.8B, то окно корреляции покрывает часть фактического защитного интервала, а также часть полезной части передаваемого OFDM-символа. Топология канала для ложной гипотезы приводит к результату меньшей корреляции между защитным интервалом и защитной копией, которая содержит произвольные данные, которые зачастую статически независимы. Результаты корреляции для двух гипотез, таким образом, могут быть использованы для того, чтобы определять, какая гипотеза является корректной, и корректировать все ошибочные решения FAPd и LAPd, которые вытекают из использования только оценки импульсной характеристики канала.
Корректная гипотеза может быть определена следующим образом:

где FAPО и LAPО - это выходные FAP и LAP, предоставляемые посредством блока 414 на фиг.4. Уравнение (11a) предназначено для случая, когда гипотеза 0 является корректной, и обнаруженные FAP и LAP предоставляются непосредственно как выходные FAP и LAP соответственно. Уравнение (11b) предназначено для случая, когда гипотеза 1 является корректной, и обнаруженные FAP и LAP переставляются и предоставляются как выходные FAP и LAP.
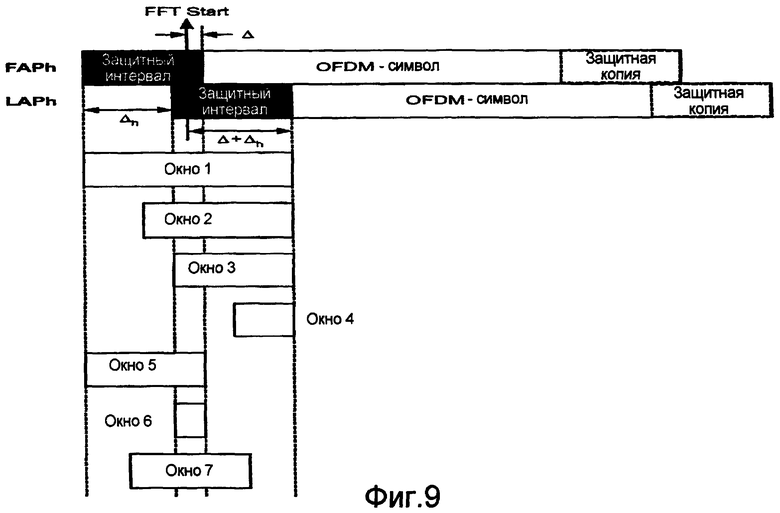
Фиг.9 иллюстрирует различные варианты осуществления окна корреляции. Для варианта осуществления, показанного на фиг.8A-8D, который помечен как окно 1 на фиг.9, окно корреляции начинается с первой выборки защитного интервала для гипотетического FAP и завершается на последней выборке защитного интервала для гипотетического LAP. Для варианта осуществления, помеченного как окно 2, окно корреляции начинается со средней выборки защитного интервала для гипотетического FAP и завершается на последней выборке защитного интервала для гипотетического LAP. Для варианта осуществления, помеченного как окно 3, окно корреляции охватывает весь защитный интервал для гипотетического LAP. Для варианта осуществления, помеченного как окно 4, окно корреляции охватывает часть (к примеру, вторую половину) защитного интервала для гипотетического LAP. Для варианта осуществления, помеченного как окно 5, окно корреляции охватывает весь защитный интервал для гипотетического FAP. Для варианта осуществления, помеченного как окно 6, окно корреляции охватывает зону ISI/ICI для гипотетических FAP и LAP. Для варианта осуществления, помеченного как окно 7, окно корреляции имеет фиксированный размер (к примеру, G выборок) и центрировано посередине области ISI/ICI для гипотетических FAP и LAP. Также могут быть использованы различные другие окна корреляции. В другом варианте осуществления, который не показан на фиг.9, размер окна корреляции может быть выбран как W≥max{Δh}. В этом варианте осуществления предыдущие местоположения FAP/LAP могут быть использованы для того, чтобы ограничивать размер окна корреляции.
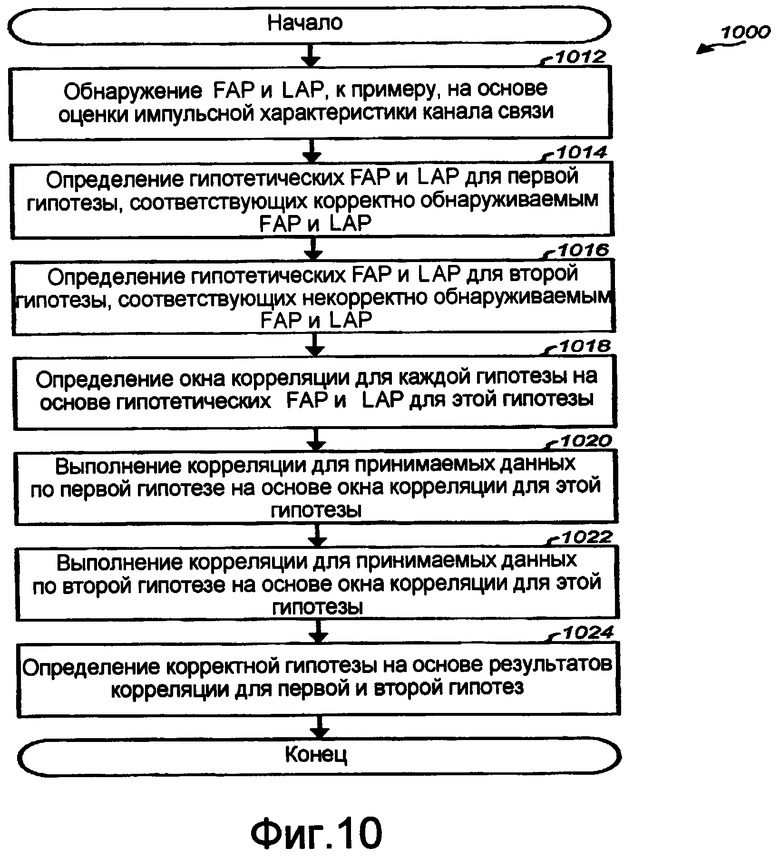
Фиг.10 иллюстрирует вариант осуществления процесса 1000 разрешения неоднозначности в обнаруженных FAP и LAP. FAP и LAP изначально обнаруживаются, к примеру, на основе оценки импульсной характеристики канала связи (этап 1012). FAP и LAP могут быть обнаружены, к примеру, посредством определения энергий канальных отводов в рамках скользящего окна для различных позиций отводов, определения значений конечной разности на основе энергий, обнаружения FAP на основе первой функции от энергий и значений конечной разности и обнаружения LAP на основе второй функции от энергий и значений конечной разности, как описано выше для уравнений (1)-(7).
Гипотетические FAP и LAP для первой гипотезы, соответствующие корректно обнаруживаемым FAP и LAP, определяются на основе обнаруженных FAP и LAP (этап 1014). Гипотетические FAP и LAP для второй гипотезы, соответствующие некорректно обнаруживаемым FAP и LAP, также определяются на основе обнаруженных FAP и LAP (этап 1016). Окно корреляции определяется для каждой гипотезы на основе гипотетических FAP и LAP для этой гипотезы (этап 1018). Окно корреляции для каждой гипотезы может охватывать весь или часть защитного интервала для гипотетического FAP и/или весь или часть защитного интервала для гипотетического LAP.
После этого выполняется корреляция для принимаемых данных по первой гипотезе на основе окна корреляции для первой гипотезы (этап 1020). Также выполняется корреляция для принимаемых данных по второй гипотезе на основе окна корреляции для второй гипотезы (этап 1022). Для каждой гипотезы корреляция может быть осуществлена между первым сегментом принимаемых данных в рамках окна корреляции для этой гипотезы и вторым сегментом принимаемых данных, который отстоит на K выборок, где K - это продолжительность полезной части OFDM-символа. Затем определяется корректная гипотеза на основе результатов корреляции для первой и второй гипотез (этап 1024).
В другом аспекте корректные FAP и LAP определяются посредством оценки одной гипотезы. FAP и LAP могут быть первоначально обнаружены так, как описано выше. Одна гипотеза для FAP и LAP может быть выбрана для оценки различными способами.
В одном варианте осуществления гипотеза, которая приводит к меньшей корректировке синхронизации относительно текущего указателя FFT Start, выбирается для оценки. В этом варианте осуществления величина корректировки синхронизации для текущего указателя FFT Start для гипотезы 0 определяется и обозначается как ΔT0. Величина корректировки синхронизации для текущего указателя FFT Start для гипотезы 1 определяется и обозначается как ΔT1. Гипотеза с меньшей корректировкой синхронизации выбирается для оценки и называется гипотезой s. Корреляция выполняется для выбранной гипотезы s так, как описано выше. Результат корреляции C s для гипотезы s может сравниваться с порогом C th . Если C s больше C th , то гипотеза s считается корректной гипотезой, и указатель FFT Start может быть обновлен на основе гипотетических FAP и LAP для гипотезы s. В противном случае, если C s равно или меньше C th , то другая гипотеза, которая не оценивалась (которая называется гипотезой u), считается корректной гипотезой, и указатель FFT Start может быть обновлен на основе гипотетических FAP и LAP для гипотезы u.
В другом варианте осуществления гипотеза выбирается для оценки на основе синхронизации (к примеру, корректировок синхронизации) для предыдущих решений гипотез. В этом варианте осуществления корректировки синхронизации могут вычисляться для гипотез 0 и 1 так, как описано выше. Корректировки синхронизации для двух гипотез могут сравниваться с корректировками синхронизации для корректной гипотезы по предыдущим интервалам обновления. Например, корректировки синхронизации для P последних корректных гипотез могут быть сохранены, и гипотеза 0 или 1, которая ближе к большему числу из P сохраненных гипотез, может быть выбрана для оценки. В качестве другого примера может быть выбрана гипотеза 0 или 1, которая ближе к средней синхронизации из P сохраненных гипотез. Другие типы статистической информации также могут быть сохранены и использованы для выбора гипотезы. В любом случае выбранная гипотеза может быть оценена, и результат корреляции C s может сравниваться с порогом C th, чтобы определить, является ли выбранная гипотеза s или невыбранная гипотеза u корректной гипотезой.
Одна гипотеза может быть выбрана для оценки на основе обнаруженных FAP и LAP и статистической информации, как описано выше. Одна гипотеза также может быть выбрана без статистической информации. Например, может всегда выбираться гипотеза 0, либо может произвольно выбираться одна гипотеза. Выбранная гипотеза может оцениваться и сравниваться с порогом C th. Пороговое значение C th может быть фиксированным значением, которое может быть выбрано для достижения хорошей рабочей характеристики. Пороговое значение C th также может быть конфигурируемым значением, которое может быть установлено, к примеру, на основе результатов корреляции для последних корректных гипотез. Окно корреляции для выбранной гипотезы может быть определено на основе любого из вариантов осуществления, описанных выше для фиг.9. Окно корреляции переменного размера позволяет повышать эффективность обнаружения. Однако окно корреляции фиксированного размера позволяет снижать сложность реализации.
Фиг.11 иллюстрирует вариант осуществления процесса 1100 разрешения неоднозначности в обнаруженных FAP и LAP. FAP и LAP изначально обнаруживаются, к примеру, на основе оценки импульсной характеристики канала связи (этап 1112). Одна гипотеза для FAP и LAP выбирается для оценки (этап 1114). Гипотеза может быть выбрана на основе текущего указателя FFT Start, статистической информации для предыдущих гипотез и т.д. Затем выполняется корреляция по принимаемым данным для выбранной гипотезы (этап 1116). То, является ли выбранная гипотеза корректной гипотезой, определяется на основе результата корреляции и порога (этап 1118).
Методы, описанные в данном документе, могут быть использованы для того, чтобы разрешать неоднозначность в обнаружении FAP и LAP, когда разброс задержек в канале составляет более половины защитного интервала (или Δh>G/2), а также когда разброс задержек в канале меньше или равен половине защитного интервала. В общем, могут быть использованы методы для разрешения неоднозначности в любых двух канальных отводах для импульсной характеристики канала связи, при этом неоднозначность обусловлена неопределенностью в отношении того, является первый канальный отвод более ранним или более поздним, чем второй канальный отвод. Корреляция может быть выполнена для первой гипотезы, соответствующей первому канальному отводу, более раннему относительно второго канального отвода. Корреляция может быть также выполнена для второй гипотезы, соответствующей первому канальному отводу, более позднему относительно второго канального отвода. Результаты корреляции для двух гипотез могут быть использованы для определения того, является ли первый канальный отвод более ранним или более поздним, чем второй канальный отвод.
Согласно фиг.4 детектор 416 центра масс принимает выходные FAP и LAP из блока 414 и определяет центр масс оценки импульсной характеристики канала. В варианте осуществления детектор 416 определяет центр масс исключительно на основе выходных FAP и LAP. Например, центр масс может быть задан равным средней точке между FAPО и LAPО следующим образом:

где DS - это выбранный разброс задержек в канале. В уравнении (12a) разброс задержек в канале вычисляется как {(LAPО-FAPО) mod N}, где операция mod N учитывает случай, когда LAPО находится слева от FAPО в профиле задержки в канале. В уравнении (12b) центр масс равен половине разброса задержек в канале от FAPО, при этом операция mod N учитывает возможное циклическое "заворачивание" центра масс. В другом варианте осуществления центр масс определяется на основе более двух (к примеру, всех) канальных отводов в оценке импульсной характеристики канала, канальных отводов достаточной длины и т.п. Вычисление центра масс может проводиться другими способами, известными в данной области техники.
Ошибка синхронизации из сумматора 418 может быть вычислена следующим образом:
Ошибка синхронизации - это значение со знаком, которое может быть положительным, нулем и отрицательным.
В варианте осуществления корректировка синхронизации из контурного фильтра 420 может быть вычислена следующим образом:
В другом варианте осуществления корректировка синхронизации может быть вычислена следующим образом:
Gain в уравнении (14) и Gain1 и Gain2 в уравнении (15) могут быть фиксированными или программируемыми значениями усиления.
Корректировка синхронизации может быть ограничена заранее определенным диапазоном значений следующим образом:
где Max Adjust - это абсолютное значение корректировки синхронизации для любого данного обновления, а SAT { } - это операция насыщения. Результирующий Adv/Ret (t) - это насыщенное значение со знаком.
Указатель FFT Start может быть обновлен следующим образом:
Указатель FFT Start продвигается вперед на K+G периодов выборки для каждого OFDM-символа и дополнительно обновляется на Adv/Ret(t) в каждом интервале обновления контура.
Контур 320 временного отслеживания пытается сохранить центр масс в конкретном месте профиля задержки в канале, которое упоминается как целевая синхронизация. Хорошее местоположение для целевой синхронизации может зависеть от фактической импульсной характеристики канала, длины окна оценки канала (N), длины защитного интервала (G) и т.п. Программируемое значение может быть использовано для целевой синхронизации. Усиление контурного фильтра, Max Adjust и/или другие параметры могут быть фиксированными или конфигурируемыми значениями.
Фиг.12 иллюстрирует вариант осуществления процесса 1200 выполнения временного отслеживания в приемнике. FAP и LAP изначально обнаруживаются, к примеру, на основе оценки импульсной характеристики канала связи (этап 1212). Неоднозначность в обнаруженных FAP и LAP далее разрешается посредством выполнения корреляции по принимаемым данным, по меньшей мере, для одной гипотезы для FAP и LAP (этап 1214). Две гипотезы могут быть оценены, как описано на фиг.10, или одна гипотеза может быть оценена, как описано на фиг.11. Синхронизация в приемнике после этого обновляется на основе гипотетических FAP и LAP для корректной гипотезы (этап 1216). На этапе 1216 центр масс оценки импульсной характеристики канала может быть определен на основе (к примеру, в качестве средней точки между) гипотетических FAP и LAP для корректной гипотезы. Ошибка синхронизации может быть определена на основе центра масс и цели синхронизации и может быть фильтрована так, чтобы получить корректировку синхронизации. Корректировка синхронизации может быть ограничена заранее определенным диапазоном значений и может быть использована для того, чтобы обновлять синхронизацию приемника, к примеру указатель FFT Start. OFDM-демодуляция выполняется для принимаемых данных на основе обновленной синхронизации приемника (этап 1218). Указатель FFT Start может быть использован для того, чтобы выбирать выборки в принимаемых данных для обработки.
Описанные в данном документе методы могут быть реализованы различными средствами. Например, эти методы могут быть реализованы в аппаратных средствах, микропрограммном обеспечении, программном обеспечении или их сочетании. При реализации в аппаратных средствах блоки обработки, используемые для того, чтобы разрешать неоднозначность в оценке канала и/или выполнять временное отслеживание в приемнике, могут быть реализованы в одной или нескольких специализированных интегральных схемах (ASIC), процессорах цифровых сигналов (DSP), устройствах цифровой обработки сигналов (DSPD), программируемых логических устройствах (PLD), программируемых пользователем матричных БИС (FPGA), процессорах, контроллерах, микроконтроллерах, микропроцессорах, электронных устройствах, других электронных блоках, предназначенных для того, чтобы выполнять описанные в данном документе функции, или в их сочетаниях.
При реализации в микропрограммном обеспечении и/или программном обеспечении методы могут быть реализованы с помощью модулей (к примеру, процедур, функций и т.п.), которые выполняют описанные в данном документе функции. Программные коды могут быть сохранены в запоминающем устройстве (к примеру, в запоминающем устройстве 182 на фиг.1) и приведены в исполнение процессором (к примеру, процессором 180). Запоминающее устройство может быть реализовано в процессоре или как внешнее по отношению к процессору.
Предшествующее описание раскрытых вариантов осуществления предоставлено для того, чтобы дать возможность любому специалисту в данной области техники реализовать или использовать настоящее изобретение. Различные модификации в этих вариантах осуществления должны быть очевидными для специалистов в данной области техники, а описанные в данном документе общие принципы могут быть применены к другим вариантам осуществления без отступления от сущности и объема изобретения. Таким образом, настоящее изобретение не предназначено, чтобы быть ограниченным показанными в данном документе вариантами осуществления, а должно соответствовать самому широкому объему, согласованному с принципами и новыми признаками, раскрытыми в данном документе.


Изобретение относится к технике связи. Технический результат состоит во временном отслеживании в приемнике для точного размещения FFT-окна. Для этого первый путь прихода (FAP) и последний путь прихода (LAP) обнаруживаются на основе оценки импульсной характеристики канала связи. Обнаруженные FAP и LAP могут быть корректными или переставленными, чтобы разрешить неоднозначность в обнаруженных FAP и LAP, оценивается первая гипотеза, соответствующая корректному обнаружению FAP и LAP, и вторая гипотеза, соответствующая некорректному обнаружению FAP и LAP. Для каждой гипотезы определяются гипотетические FAP и LAP на основе обнаруженных FAP и LAP, определяется окно корреляции на основе гипотетических FAP и LAP, и выполняется корреляция с помощью окна корреляции. Корректная гипотеза определяется на основе результатов корреляции для двух гипотез. Синхронизация в приемнике обновляется на основе гипотетических FAP и LAP для корректной гипотезы и используется для демодуляции. 7 н. и 29 з.п. ф-лы, 25 ил.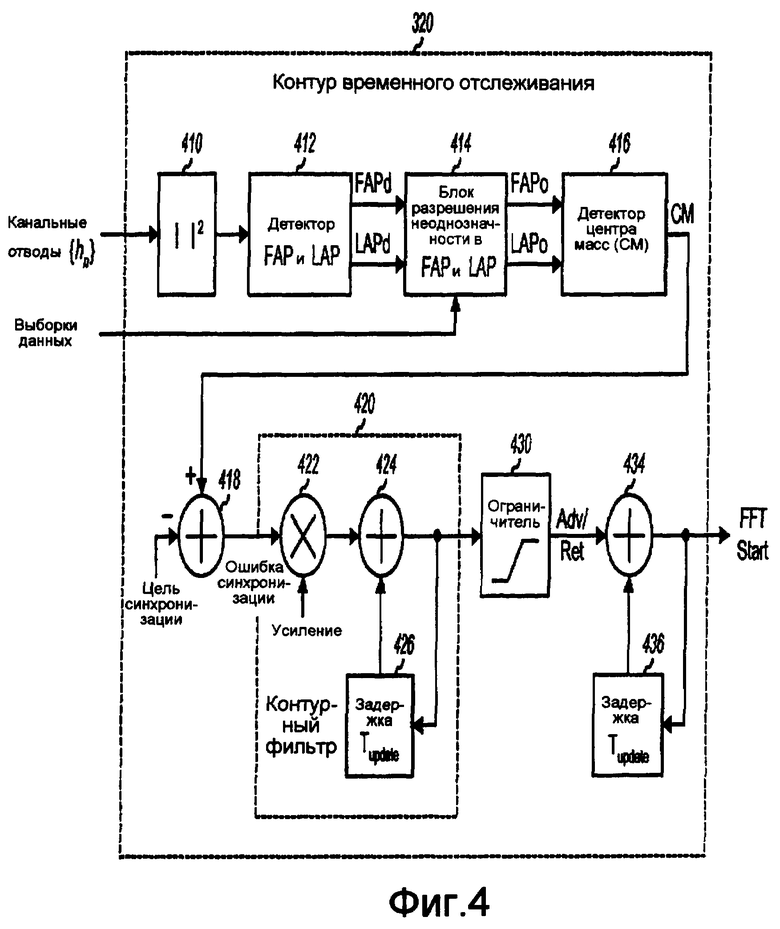
1. Устройство поиска принимаемого сигнала в системе связи, содержащее:
по меньшей мере, один процессор, выполненный с возможностью обнаруживать первый путь прихода (FAP) и последний путь прихода (LAP) на основе оценки импульсной характеристики канала связи, выполнять корреляцию по принимаемым данным для первой гипотезы, соответствующей корректно обнаруженным FAP и LAP, выполнять корреляцию по принимаемым данным для второй гипотезы, соответствующей некорректно обнаруженным FAP и LAP, определять первое окно корреляции для первой гипотезы и второе окно корреляции для второй гипотезы на основе обнаруженных FAP и LAP, и определять корректную гипотезу из первой и второй гипотезы на основе результатов корреляции для первой и второй гипотез; и
запоминающее устройство, соединенное, по меньшей мере, с одним процессором.
2. Устройство по п.1, в котором, по меньшей мере, один процессор выполнен с возможностью выполнять корреляцию между первым сегментом принимаемых данных в первом окне корреляции и вторым сегментом принимаемых данных и выполнять корреляцию между третьим сегментом принимаемых данных во втором окне корреляции и четвертым сегментом принимаемых данных.
3. Устройство по п.2, в котором первый и второй сегменты разделены на К выборок, и третий и четвертый сегменты разделены на К выборок, где К - длительность полезной части OFDM-символа.
4. Устройство по п.1, в котором, по меньшей мере, один процессор выполнен с возможностью определять гипотетические FAP и LAP для каждой гипотезы на основе обнаруженных FAP и LAP.
5. Устройство по п.4, в котором, по меньшей мере, один процессор выполнен с возможностью определять окно корреляции для каждой гипотезы так, чтобы охватывать защитные интервалы для гипотетических FAP и LAP для гипотезы.
6. Устройство по п.4, в котором, по меньшей мере, один процессор выполнен с возможностью определять окно корреляции для каждой гипотезы так, чтобы охватывать, по меньшей мере, часть защитного интервала для гипотетического FAP и, по меньшей мере, часть защитного интервала для гипотетического LAP.
7. Устройство по п.4, в котором, по меньшей мере, один процессор выполнен с возможностью определять окно корреляции для каждой гипотезы так, чтобы охватывать, по меньшей мере, часть защитного интервала для гипотетического FAP.
8. Устройство по п.4, в котором, по меньшей мере, один процессор выполнен с возможностью определять окно корреляции для каждой гипотезы так, чтобы охватывать, по меньшей мере, часть защитного интервала для гипотетического LAP.
9. Устройство по п.1, в котором оценка импульсной характеристики канала содержит множество канальных отводов, при этом, по меньшей мере, один процессор выполнен с возможностью определять энергии канальных отводов в пределах скользящего окна для различных позиций отводов, определять значения конечной разности на основе энергий для различных позиций отвода, обнаруживать FAP на основе первой функции от энергий и значений конечной разности и обнаруживать LAP на основе второй функции от энергий и значений конечной разности.
10. Устройство по п.4, в котором, по меньшей мере, один процессор выполнен с возможностью определять центр масс импульсной характеристики канала связи на основе гипотетических FAP и LAP для корректной гипотезы, обновлять указатель на основе центра масс и использовать указатель для того, чтобы выбирать выборки в принимаемых данных для обработки.
11. Устройство по п.10, в котором, по меньшей мере, один процессор выполнен с возможностью определять центр масс как среднюю точку между гипотетическими FAP и LAP для корректной гипотезы.
12. Устройство по п.10, в котором, по меньшей мере, один процессор выполнен с возможностью определять ошибку синхронизации на основе центра масс и цели синхронизации, фильтровать ошибку синхронизации, чтобы получить корректировку синхронизации, и обновлять указатель на основе корректировки синхронизации.
13. Устройство по п.12, в котором, по меньшей мере, один процессор выполнен с возможностью ограничивать корректировку синхронизации до заранее определенного диапазона значений.
14. Устройство по п.1, в котором, по меньшей мере, один процессор выполнен с возможностью обновлять синхронизацию на основе корректной гипотезы и выполнять демодуляцию с мультиплексированием с ортогональным частотным разделением сигналов (OFDM) для принимаемых данных на основе обновленной синхронизации.
15. Способ поиска принимаемого сигнала в системе связи, содержащий этапы, на которых:
обнаруживают первый путь прихода (FAP) и последний путь прихода (LAP) на основе оценки импульсной характеристики канала связи;
выполняют корреляцию по принимаемым данным для первой гипотезы, соответствующей корректно обнаруженным FAP и LAP;
выполняют корреляцию по принимаемым данным для второй гипотезы, соответствующей некорректно обнаруженным FAP и LAP;
определяют первое окно корреляции для первой гипотезы и второе окно корреляции для второй гипотезы на основе обнаруженных FAP и LAP; и
определяют корректную гипотезу из первой и второй гипотезы на основе результатов корреляции для первой и второй гипотез.
16. Способ по п.15, в котором выполнение корреляции принимаемых данных содержит этапы, на которых:
выполняют корреляцию между первым сегментом принимаемых данных в первом окне корреляции и вторым сегментом принимаемых данных, и
выполняют корреляцию между третьим сегментом принимаемых данных во втором окне корреляции и четвертым сегментом принимаемых данных.
17. Способ по п.15, в котором выполнение корреляции принимаемых данных содержит этапы, на которых:
определяют гипотетические FAP и LAP для каждой гипотезы на основе обнаруженных FAP и LAP, определяют окно корреляции для каждой гипотезы так, чтобы охватывать часть защитного интервала для гипотетического FAP, часть защитного интервала для гипотетического LAP или и то, и другое, и
выполняют корреляцию для каждой гипотезы на основе окна корреляции для гипотезы.
18. Способ по п.15, дополнительно содержащий этапы, на которых:
обновляют синхронизацию на основе корректной гипотезы; и выполняют
демодуляцию с мультиплексированием с ортогональным частотным разделением сигналов (OFDM) для принимаемых данных на основе обновленной синхронизации.
19. Устройство поиска принимаемого сигнала в системе связи, содержащее:
средство для обнаружения первого пути прихода (FAP) и последнего пути прихода (LAP) на основе оценки импульсной характеристики канала связи;
средство для выполнения корреляции по принимаемым данным для первой гипотезы, соответствующей корректно обнаруженным FAP и LAP;
средство для выполнения корреляции по принимаемым данным для второй гипотезы, соответствующей некорректно обнаруженным FAP и LAP;
средство для определения первого окна корреляции для первой гипотезы и второго окна корреляции для второй гипотезы на основе обнаруженных FAP и LAP; и
средство для определения корректной гипотезы из первой и второй гипотезы на основе результатов корреляции для первой и второй гипотез.
20. Устройство по п.19, в котором средство для выполнения корреляции принимаемых данных содержит:
средство для выполнения корреляции между первым сегментом принимаемых данных в первом окне корреляции и вторым сегментом принимаемых данных, и
средство для выполнения корреляции между третьим сегментом принимаемых данных во втором окне корреляции и четвертым сегментом принимаемых данных.
21. Устройство по п.19, в котором средство для выполнения корреляции принимаемых данных содержит:
средство для определения гипотетических FAP и LAP для каждой гипотезы на основе обнаруженных FAP и LAP,
средство для определения окна корреляции для каждой гипотезы так, чтобы охватывать часть защитного интервала для гипотетического FAP, часть защитного интервала для гипотетического LAP или и то, и другое, и
средство для выполнения корреляции для каждой гипотезы на основе окна корреляции гипотезы.
22. Устройство по п.19, дополнительно содержащее:
средство для обновления синхронизации на основе корректной гипотезы; и
средство для выполнения демодуляции с мультиплексированием с ортогональным частотным разделением сигналов (OFDM) для принимаемых данных на основе обновленной синхронизации.
23. Читаемый процессором носитель для сохранения инструкций, действующих, чтобы
обнаруживать первый путь прихода (FAP) и последний путь прихода (LAP) на основе оценки импульсной характеристики канала связи;
выполнять корреляцию по принимаемым данным для первой гипотезы, соответствующей корректно обнаруженным FAP и LAP;
выполнять корреляцию по принимаемым данным для второй гипотезы, соответствующей некорректно обнаруженным FAP и LAP;
определять первое окно корреляции для первой гипотезы и второе окно корреляции для второй гипотезы на основе обнаруженных FAP и LAP; и
определять корректную гипотезу из первой и второй гипотезы на основе результатов корреляции для первой и второй гипотез.
24. Читаемый процессором носитель по п.23 и дополнительно для сохранения инструкций, действующих, чтобы
выполнять корреляцию между первым сегментом принимаемых данных в первом окне корреляции и вторым сегментом принимаемых данных, и выполнять корреляцию между третьим сегментом принимаемых данных во втором окне корреляции и четвертым сегментом принимаемых данных.
25. Читаемый процессором носитель по п.23 и дополнительно для сохранения инструкций, действующих, чтобы
определять гипотетические FAP и LAP для каждой гипотезы на основе обнаруженных FAP и LAP,
определять окно корреляции для каждой гипотезы так, чтобы охватывать часть защитного интервала для гипотетического FAP, часть защитного интервала для гипотетического LAP или и то, и другое, и
выполнять корреляцию для каждой гипотезы на основе окна корреляции гипотезы.
26. Читаемый процессором носитель по п.23 и дополнительно для сохранения инструкций, действующих, чтобы обновлять синхронизацию на основе корректной гипотезы; и выполнять демодуляцию с мультиплексированием с ортогональным частотным разделением сигналов (OFDM) для принимаемых данных на основе обновленной синхронизации.
27. Устройство поиска принимаемого сигнала в системе связи, содержащее:
по меньшей мере, один процессор, выполненный с возможностью определять первый и второй канальные сигналы на основе оценки импульсной характеристики канала связи, выполнять корреляцию по принимаемым данным для первой гипотезы, соответствующей более раннему первому канальному сигналу, чем второй канальный сигнал, выполнять корреляцию по принимаемым данным для второй гипотезы, соответствующей более позднему первому канальному сигналу, чем второй канальный сигнал, определять первое окно корреляции для первой гипотезы и второе окно корреляции для второй гипотезы на основе определенных первого и второго канальных сигналов, и определять, является ли первый канальный сигнал более ранним или более поздним, чем второй канальный сигнал, на основе результатов корреляции для первой и второй гипотез; и
запоминающее устройство, соединенное, по меньшей мере, с одним процессором.
28. Устройство по п.27, в котором для каждой гипотезы, по меньшей мере, один процессор выполнен с возможностью определять окно корреляции для гипотезы, чтобы охватывать часть защитного интервала для первого канального сигнала, часть защитного интервала для второго канального сигнала или и то, и другое, и выполнять корреляцию для гипотезы на основе окна корреляции.
29. Устройство по п.27, в котором, по меньшей мере, один процессор выполнен с возможностью обновлять синхронизацию на основе корректной гипотезы и выполнять демодуляцию принимаемых данных на основе обновленной синхронизации.
30. Устройство поиска принимаемого сигнала в системе связи, содержащее:
по меньшей мере, один процессор, выполненный с возможностью обнаруживать первый путь прихода (FAP) и последний путь прихода (LAP) на основе оценки импульсной характеристики канала связи, выбирать гипотезу по FAP и LAP для оценки, выполнять корреляцию по принимаемым данным для выбранной гипотезы, определять окно корреляции для выбранной гипотезы на основе обнаруженных FAP и LAP, и определять то, является ли выбранная гипотеза корректной гипотезой, на основе результата корреляции для выбранной гипотезы; и
запоминающее устройство, соединенное, по меньшей мере, с одним процессором.
31. Устройство по п.30, в котором, по меньшей мере, один процессор выполнен с возможностью выбирать гипотезу на основе статистической информации по ранее оцененным гипотезам.
32. Устройство по п.30, в котором, по меньшей мере, один процессор выполнен с возможностью выбирать гипотезу, ассоциированную с синхронизацией, которая является ближайшей к синхронизации ранее оцененных гипотез.
33. Устройство по п.30, в котором, по меньшей мере, один процессор выполнен с возможностью определять то, является ли выбранная гипотеза корректной гипотезой, на основе результата корреляции и порога.
34. Устройство поиска принимаемого сигнала в системе связи, содержащее:
средство для обнаружения первого пути прихода (FAP) и последнего пути прихода (LAP) на основе оценки импульсной характеристики канала связи;
средство для выбора гипотезы по FAP и LAP для оценки;
средство для выполнения корреляции по принимаемым данным для выбранной гипотезы;
средство для определения окна корреляции для выбранной гипотезы на основе обнаруженных FAP и LAP; и
средство для определения того, является ли выбранная гипотеза корректной гипотезой, на основе результата корреляции для гипотезы.
35. Устройство по п.34, в котором средство для выбора гипотезы содержит средство для выбора гипотезы на основе статистической информации для ранее оцененных гипотез.
36. Устройство по п.34, в котором средство определения того, является ли выбранная гипотеза корректной гипотезой, содержит средство для определения того, является ли выбранная гипотеза корректной гипотезой, на основе результата корреляции и порога.
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| СПОСОБ ПЕРЕКЛЮЧЕНИЯ МОБИЛЬНЫХ АБОНЕНТОВ В МОБИЛЬНОЙ РАДИОСЕТИ | 1993 |
|
RU2107992C1 |
| СПОСОБ И УСТРОЙСТВО ПОИСКА ПИЛОТ-СИГНАЛА В СОТОВОЙ СИСТЕМЕ СВЯЗИ | 1995 |
|
RU2150176C1 |
| Устройство для электротермомеханического разрушения горных пород | 1986 |
|
SU1416693A2 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ приготовления мыла | 1923 |
|
SU2004A1 |

