Область техники, к которой относится изобретение
Настоящее изобретение относится к способу захватывания предметов манипулятором, захвату манипулятора, манипулятору и роботу для настольных игр и может быть использовано, например, для построения шахматного робота, использующего предлагаемый манипулятор с захватом.
Уровень техники
В настоящее время известны различные манипуляторы, снабженные захватами для захватывания и перемещения различных предметов.
Так, в патенте Германии №3715140 (опубл. 24.11.1988) описано погрузочное устройство, содержащее два пальца в виде параллельных стержней на концах двух элементов, сходящихся и расходящихся по направляющим. Такая конструкция имеет весьма ограниченное применение, поскольку ею неудобно захватывать предметы с криволинейной поверхностью. Кроме того, этому устройству необходимо значительное пространство для обеспечения возможности раздвигания стержней.
Патент Канады №2286538 (опубл. 15.04.2000) раскрывает руку робота, в которой два пальца захвата сдвигаются и раздвигаются за счет поворачивания соответствующих направляющих. Недостатки этого устройства такие же, как и у предыдущего.
В выложенной заявке Японии №05-208391 (опубл. 20.08.1993) описана рука робота, в которой имеется три двухколенных пальца, которые могут перемещаться по радиусу и вращаться в прорезях основания. Недостатком этого устройства также является его ограниченное применение, поскольку оно лучше всего работает с круглыми предметами. Кроме того, данное устройство достаточно сложно в изготовлении. В выложенной заявке Японии №2007-007008 (опубл. 18.01.2007) описана еще более сложная рука робота, содержащая многозвенные пальцы захвата, которые управляются в каждом своем звене.
В патенте США №5456561 (опубл. 10.10.1995) представлен робот с предварительным совмещением, который имеет два горизонтально перемещаемых плеча и поворотный конец, которые все могут быть предварительно установлены в требуемое положение. Захват этого робота, однако, выполнен в виде простой двухзубой вилки и приспособлен лишь для поднимания полупроводниковых пластин.
Патент Китая №1385224 (опубл. 18.12.2002) раскрывает гроссмейстерский робот, содержащий манипулятор с двумя перемещаемыми в горизонтальной плоскости плечами. В захвате этого робота используются электромагниты, что сильно ограничивает возможности его использования лишь специальными фигурами. В патенте Китая №1524665 (опубл. 01.09.2004) раскрыта еще более сложная конструкция захвата специально для шахматного робота с электромагнитами.
На сайте http://v.ladimir.kiev.ua/cr/robot.htm представлен шахматный робот, в котором перемещение подвижных элементов осуществляется с применением гидроцилиндров, что сильно утяжеляет конструкцию и снижает скорость перемещения. Захват же выполнен в виде трех шарнирно установленных пальцев, расходящихся и сходящихся с помощью достаточно сложного привода, воздействующего на верхние концы пальцев.
На сайте http://members.lycos.co.uk/nasroncheong/dynatutor/ представлен шахматный манипулятор в виде руки с пятью степенями свободы. Захват на конце этой руки перемещается в вертикальной плоскости, что требует увеличенной мощности (и веса) сервоприводов. Сам захват представляет собой пару сдвигаемых губок, что требует достаточного пространства между фигурами и не исключает выскальзывания захваченной фигуры.
Наиболее близкий к заявленному изобретению аналог описан в патенте США №4398720 (опубл. 16.08.1983). Это компьютерная шахматная игра с помощью робота, которая проводится на доске с магнитами под каждым квадратом с помощью снабженных магнитами шахматных фигур. Манипулятор имеет два перемещаемых в горизонтальной плоскости плеча, причем перемещения плеч производятся с помощью тросиков, которые тянутся соответствующими сервоприводами. Захват представляет собой три расположенных по кругу пальца, загнутых на обоих концах внутрь этого круга. Нижние загибы служат для захвата шахматной фигуры в соответствующую канавку в ее нижней части. Верхние концы пальцев укреплены на шарнирах в точке изгиба, так что на загнутые концы можно надавливать сверху (для раскрытия захвата) или снизу (для закрытия захвата).
Этот аналог имеет следующие недостатки. Использование магнитов в доске и фигурах может привести к тому, что фигура встанет не в центре клетки или притянется к соседней клетке или фигуре. При этом манипулятору необходимо каждый раз преодолевать притяжение магнитов для отделения фигуры от доски, что требует увеличения мощности соответствующего привода, а следовательно, и его веса. Использование поворотной тяги для опускания захвата требует использования приводов, развивающих большие усилия, т.е. имеющих большой вес. Пальцы захвата при опускании широко раскрыты, из-за чего может произойти смещение соседней фигуры, т.е. такой захват можно применять только для предметов, между которыми имеется достаточный зазор. При этом фигуры должны иметь специальную канавку для захватывания, что ограничивает применение данного манипулятора. Наконец, при необходимости в игре взять какую-либо шахматную фигуру манипулятору приходится совершать двойное перемещение: сначала снять одну фигуру, а потом поставить на ее место другую.
Сущность изобретения
Таким образом, существует необходимость в более универсальном захвате, манипуляторе с таким захватом и роботе с таким манипулятором для настольной игры, в которых были бы преодолены недостатки существующего уровня техники.
В этой целью предлагается группа изобретений, позволяющая получить технический результат в виде упрощения и облегчения конструкции и обеспечения универсальности захвата, а также использующих этот захват манипулятора и робота.
Для достижения этой цели в первом объекте настоящего изобретения предлагается способ захватывания предметов манипулятором, в котором: размещают в рабочем местоположении манипулятора основание с установленным на нем серводвигателем, выходной вал которого снабжен поворотным элементом; прикрепляют n стержней, где n≥3, за их верхние концы в углах равностороннего n-угольника, вписанного в основание, с возможностью отклонения нижних концов всех n стержней к точке, лежащей под центром упомянутого равностороннего n-угольника; закрепляют на по меньшей мере одном крепежном элементе, предусмотренном на нижнем конце каждого из n стержней, один конец соответствующей из n гибких тяг; пропускают упомянутую гибкую тягу через крепежный элемент ближайшего стержня, расположенного с одной и той же стороны для любого из n стержней, и далее вдоль этого ближайшего стержня к поворотному элементу; закрепляют упомянутую гибкую тягу другим своим концом на упомянутом поворотном элементе; инициируют серводвигатель, обеспечивая тем самым поворот упомянутого поворотного элемента на заранее заданный угол, что приводит к натяжению всех n гибких тяг, вызывающему упомянутое отклонение нижних концов всех n стержней и сведение их друг к другу.
Предпочтительно выбирают n=4.
Для достижения той же цели во втором объекте настоящего изобретения предлагается захват манипулятора, содержащий: основание с неподвижно установленным на нем серводвигателем; поворотный элемент, жестко закрепленный на выходном валу серводвигателя; n стержней, где n≥3, прикрепленных за свои верхние концы в углах равностороннего n-угольника, вписанного в основание, с возможностью отклонения нижних концов всех n стержней к точке, лежащей под центром упомянутого равностороннего n-угольника, при этом каждый из n стержней снабжен на нижнем конце по меньшей мере одним крепежным элементом; n гибких тяг, каждая из которых закреплена одним своим концом на крепежном элементе соответствующего из n стержней, перекинута через крепежный элемент ближайшего стержня, расположенного с одной и той же стороны для любого из n стержней, проходит вдоль этого ближайшего стержня и закреплена другим своим концом на упомянутом поворотном элементе.
Предпочтительно выбирают n=4.
Особенность данного захвата состоит в том, что каждый из n стержней имеет на своем нижнем конце дугообразный элемент, касательная к которому перпендикулярна продольной оси данного стержня и который является частью окружности, образуемой при сведении вместе нижних концов всех n стержней.
Другая особенность данного захвата состоит в том, что крепежный элемент представляет собой петлю. При этом предпочтительно, чтобы каждый из n стержней имел на своем нижнем конце две петли, расположенные симметрично относительно продольной оси данного стержня и обращены каждая к одному из ближайших стержней, причем одна из этих двух петель предназначена для закрепления нижнего конца соответствующей гибкой тяги, а другая из этих двух петель предназначена для пропускания гибкой тяги, закрепленной нижним концом на соответствующем ближайшем стержне.
Еще одна особенность данного захвата состоит в том, что серводвигатель может быть установлен на основании так, что его выходной вал направлен либо перпендикулярно к плоскости основания, а гибкие тяги закреплены своими концами равномерно по периферии поворотного элемента, либо параллельно к плоскости основания, а гибкие тяги закреплены своими концами в одной точке поворотного элемента. При этом серводвигатель снабжен понижающим редуктором, выходной вал которого является выходным валом серводвигателя.
Для достижения той же цели в третьем объекте настоящего изобретения предлагается манипулятор, содержащий: неподвижную платформу; по меньшей мере один подвижный элемент, шарнирно установленный одним своим концом на упомянутой неподвижной платформе с возможностью вращения в горизонтальной плоскости; по меньшей мере один захват по второму объекту настоящего изобретения, установленный на другом конце соответствующего подвижного элемента с возможностью перемещения в вертикальном направлении; горизонтальные сервоприводы по меньшей мере по числу подвижных элементов, предназначенные каждый для перемещения в горизонтальной плоскости соответствующего подвижного элемента; вертикальные сервоприводы по числу захватов, предназначенные каждый для перемещения в вертикальном направлении соответствующего захвата.
При этом конкретное выполнение данного манипулятора может иметь следующие особенности.
Манипулятор может содержать: один подвижный элемент, выполненный телескопическим; первый горизонтальный сервопривод, предназначенный для поворота телескопического подвижного элемента относительно шарнирного закрепления одного его конца; второй горизонтальный сервопривод, предназначенный для изменения длины телескопического подвижного элемента; один упомянутый захват, установленный на другом конце телескопического подвижного элемента с возможностью перемещения в вертикальном направлении; один вертикальный сервопривод, предназначенный для перемещения в вертикальном направлении упомянутого захвата.
Иначе манипулятор может содержать: первый подвижный элемент, шарнирно установленный одним своим концом на неподвижной платформе с возможностью вращения в горизонтальной плоскости; второй подвижный элемент, шарнирно установленный одним своим концом на другом конце первого подвижного элемента с возможностью вращения в горизонтальной плоскости; один упомянутый захват, установленный на другом конце второго подвижного элемента с возможностью перемещения в вертикальном направлении; первый и второй горизонтальные сервоприводы, предназначенные каждый для перемещения в горизонтальной плоскости одноименных подвижных элементов; один вертикальный сервопривод, предназначенный для перемещения в вертикальном направлении упомянутого захвата.
Манипулятор может также содержать: первый подвижный элемент, выполненный телескопическим; второй подвижный элемент, шарнирно установленный одним своим концом на другом конце первого подвижного элемента с возможностью вращения в горизонтальной плоскости; первый и второй упомянутые захваты, установленные каждый на другом конце второго подвижного элемента с возможностью перемещения в вертикальном направлении; первый горизонтальный сервопривод, предназначенный для поворота первого подвижного элемента относительно шарнирного закрепления одного его конца; второй горизонтальный сервопривод, предназначенный для изменения длины первого подвижного элемента; первый и второй вертикальные сервоприводы, предназначенные каждый для перемещения в вертикальном направлении одноименного захвата.
Наконец, манипулятор может содержать: первый подвижный элемент, шарнирно установленный одним своим концом на неподвижной платформе с возможностью вращения в горизонтальной плоскости; второй подвижный элемент, шарнирно установленный одним своим концом на другом конце первого подвижного элемента с возможностью вращения в горизонтальной плоскости; третий подвижный элемент, шарнирно установленный одним своим концом на другом конце второго подвижного элемента с возможностью вращения в горизонтальной плоскости; первый и второй упомянутые захваты, установленные каждый на другом конце третьего подвижного элемента с возможностью перемещения в вертикальном направлении; первый-третий сервоприводы, предназначенные для перемещения в горизонтальной плоскости одноименных подвижных элементов; четвертый и пятый сервоприводы, предназначенные каждый для перемещения в вертикальном направлении первого и второго захватов, соответственно.
Для достижения той же цели в четвертом объекте настоящего изобретения предлагается робот для настольных игр, содержащий: манипулятор по третьему объекту настоящего изобретения; доску с распознаванием местоположения и типа фигур соответствующей настольной игры; компьютер, в память которого введены: программа для считывания сигналов распознавания местоположения и типа фигур с доски; по меньшей мере одна игровая программа, предназначенная для проведения соответствующей настольной игры с учетом распознанных местоположений и типов фигур; программа управления манипулятором для перемещения фигур по сигналам от игровой программы.
Особенность данного робота состоит в том, что он предназначен для игры в шахматы и содержит: манипулятор с двумя захватами; шахматную доску с распознаванием местоположения и типа шахматных фигур; компьютер, в память которого введены: программа для считывания сигналов распознавания местоположения и типа шахматных фигур с шахматной доски; по меньшей мере одна игровая программа, предназначенная для проведения соответствующей шахматной игры с учетом распознанных местоположений и типов фигур; программа управления манипулятором для перемещения шахматных фигур с возможностью их взятия по сигналам от игровой программы.
Краткое описание чертежей
Ниже приведено подробное описание предлагаемых объектов настоящего изобретения со ссылками на сопровождающие чертежи, на которых одинаковые элементы обозначены одинаковыми ссылочными позициями.
Фиг.1 показывает общий вид робота для игры в шахматы с манипулятором, снабженным захватом по настоящему изобретению.
Фиг.2 иллюстрирует работу захвата по настоящему изобретению.
Подробное описание предпочтительных вариантов осуществления
Настоящее изобретение описано ниже со ссылкой на один из возможных вариантов осуществления в виде робота для игры в шахматы, однако оно не ограничивается этим вариантом осуществления, приведенным лишь в качестве иллюстрации. Полный объем настоящего изобретения определяется лишь прилагаемой формулой изобретения с учетом возможных эквивалентов.
Приведенный ниже вариант осуществления настоящего изобретения представляет собой робот для игры в шахматы, но в процессе его описания будут сделаны необходимые уточнения относительно иных возможных применений или воплощений настоящего изобретения без отображения на чертежах; при этом соответствующие ссылочные позиции будут снабжаться апострофом для того, чтобы отличать их от таких же элементов, приведенных на чертежах.
На фиг.1 представлен робот для игры в шахматы. Этот робот содержит шахматную доску 11, компьютер 12 и манипулятор 13, условно показанный на фиг.1 установленным на компьютере 12. Разумеется, такое размещение манипулятора 13 совсем необязательно, более того - нецелесообразно и использовано здесь лишь для того, чтобы не загромождать чертеж дополнительным изображением компьютера.
В данном варианте осуществления настоящего изобретения может быть использована любая шахматная доска 11 с распознаванием местоположения и типа шахматных фигур. Это может быть, к примеру, доска, описанная в патенте США №6690156 (опубл. 10.02.2004), либо доска, описанная в патенте Китая №1448884 (опубл. 15.10.2003), либо доска, описанная в международной заявке WO 03/080200 (опубл. 02.10.2003). Можно также использовать электронную шахматную доску, представленную на сайте http://www.dgtprojects.com/eboard.htm, которая используется шахматистами для трансляции партий в Интернете и на экраны. С этой доской используется комплект фигур с индукционными датчиками. С помощью специальной программы в компьютере 12, о чем сказано далее, измеряются текущие координаты фигур на доске. В данном случае важно лишь, чтобы используемая в роботе по фиг.1 шахматная доска позволяла определять местоположение и тип каждой шахматной фигуры и передавала в компьютер 12 сигналы, соответствующие сделанным определениям.
В более общем случае, когда настоящее изобретение воплощено в роботе для какой-либо иной настольной игры (шашки, го, и т.п.), используемая доска 11' должна иметь возможность определять местоположение соответствующих фигур и их тип и передавать соответствующие сигналы в компьютер 12'. Конкретное выполнение доски 11′ не входит в объем патентных притязаний по настоящему изобретению.
Компьютер 12 может быть любым компьютерным устройством: персональным компьютером, ноутбуком, портативным компьютером и т.п. Важно лишь, чтобы в постоянной памяти этого компьютера 12 были записаны следующие программы:
- программа для считывания сигналов распознавания местоположения и типа шахматных фигур с упомянутой шахматной доски 11;
- по меньшей мере одна игровая программа, предназначенная для проведения соответствующей шахматной игры с учетом распознанных местоположений и типов фигур;
- программа управления упомянутым манипулятором 13 для перемещения шахматных фигур с возможностью их взятия по сигналам от упомянутой игровой программы.
Программа для считывания сигналов с шахматной доски 11 должна распознавать поступающие от шахматной доски 11 сигналы и передавать распознанные местоположения и типы шахматных фигур в игровую программу. Если используется, например, шахматная доска по упомянутому выше патенту Китая №1448884, эта программа воспринимает сигналы от камеры ПЗС и распознает соответствующие фигуры и их местоположение на шахматной доске путем сравнения получаемых от камеры ПЗС сигналов с соответствующими данными, заранее занесенными в память компьютера 12. При использовании, например, электронной шахматной доски, представленной на упомянутом выше сайте http://www.dgtprojects.com/eboard.htm, эта программа осуществляет периодический опрос клеток шахматной доски, воспринимает ответные сигналы индукционных датчиков, которыми снабжены фигуры, распознает воспринятые сигналы и координаты соответствующих клеток доски, на которых эти фигуры находятся.
В качестве программы для проведения шахматной игры может быть использована любая программа для игры в шахматы, - например, программа Fritz 11, доступная на сайте http://www.chessbase.com/products/fritz11/index.htm. Команды на соответствующее перемещение фигур вырабатываются на основе сигналов упомянутой выше программы считывания сигналов с шахматной доски и подаются из этой игровой программы на соответствующие исполнительные агрегаты (сервоприводы) манипулятора 13. Программа управления манипулятором 13 базируется на алгоритме работы, сущность которого описана ниже.
В более общем случае, когда настоящее изобретение воплощено в роботе для какой-либо иной настольной игры (шашки, го, лото и т.п.), в памяти компьютера 12′ должны быть записаны следующие программы, взаимосвязь между которыми аналогична взаимосвязи описанных в предыдущем примере программ:
- программа для считывания сигналов распознавания местоположения и типа фигур с доски 11′, используемой в данной конкретной игре;
- по меньшей мере одна игровая программа, предназначенная для проведения соответствующей настольной игры с учетом распознанных местоположений и типов фигур;
- программа управления манипулятором 13′ для перемещения фигур по сигналам от упомянутой игровой программы.
Конкретный вид используемых программ не входит в объем патентных притязаний по настоящему изобретению.
Манипулятор 13, показанный на фиг.1, содержит неподвижную платформу 21, на которой по меньшей мере один подвижный элемент шарнирно установлен одним своим концом с возможностью вращения в горизонтальной плоскости. В рассматриваемом варианте осуществления речь идет о первом подвижном элементе 22, один (правый по чертежу) конец которого имеет шарнирное соединение 23 с неподвижной платформой 21. Манипулятор 13 в рассматриваемом варианте осуществления имеет также второй подвижный элемент 24, один (правый по чертежу) конец которого имеет шарнирное соединение 25 с другим концом (левым по чертежу) первого подвижного элемента 22. Таким образом, в данном случае подвижные элементы 22 и 24 обеспечивают возможность перемещения другого (левого по чертежу) конца второго подвижного элемента в любую точку над игровой доской 11 в горизонтальной плоскости. Разумеется, высота, на которой оба подвижных элемента 22 и 24 перемещаются над игровой доской, должна превышать высоту самой высокой фигуры, стоящей на доске 11.
На фиг.1 показаны первый горизонтальный сервопривод 26, размещенный на неподвижной платформе 21 и предназначенный для перемещения первого подвижного элемента 22 в горизонтальной плоскости, и второй горизонтальный сервопривод 27, размещенный на другом (левом по чертежу) конце первого подвижного элемента 22 и предназначенный для перемещения второго подвижного элемента 24 в горизонтальной плоскости. На фиг.1 оба этих горизонтальных сервопривода 26 и 27 продублированы для повышения надежности.
Показанный вариант осуществления части манипулятора 13 вовсе не единственный возможный. При использовании робота с манипулятором 13′ или самого манипулятора 13' для захвата и переноса предметов в некоторой ограниченной области может оказаться выгодным использовать только один подвижный элемент 22', выполненный телескопическим и имеющий на одном своем конце шарнирное соединение 23' с неподвижной платформой 21'. При этом для обеспечения перемещения другого конца первого подвижного элемента 22' в горизонтальной плоскости в манипулятор 13' входят первый горизонтальный сервопривод 26', предназначенный для поворота телескопического подвижного элемента 22' относительно шарнирного закрепления 23' одного его конца, и второй горизонтальный сервопривод 27', предназначенный для изменения длины телескопического подвижного элемента 22'. При этом оба горизонтальных сервопривода 26' и 27' будут установлены на неподвижной платформе 21'.
В принципе манипулятор 13 может иметь и большее число подвижных элементов, если это необходимо для обеспечения перемещения в некоторой области, имеющей искривленную форму. При этом соответственно увеличится и число горизонтальных сервоприводов.
В варианте осуществления настоящего изобретения, показанном на фиг.1, на другом (левом по чертежу) конце второго подвижного элемента 24 установлен третий подвижный элемент 28 с возможностью перемещения в горизонтальной плоскости. Этот третий подвижный элемент 28 существенно короче первого и второго подвижных элементов 22 и 24 и имеет на одном своем конце шарнирное соединение 29 со вторым подвижным элементом 24. При этом на этом же конце второго подвижного элемента 24 установлен третий горизонтальный сервопривод 30, обеспечивающий перемещение третьего подвижного элемента 28 в горизонтальной плоскости.
Как видно на фиг.1, сервоприводы 26, 27 и 30 представляют собой электродвигатели - возможно с понижающими редукторами - на выходных валах которых имеются соответствующие зубчатые колеса для передачи вращения к соответствующим зубчатым колесам, закрепленным на одноименном подвижном элементе 22, 24, 28. Однако в принципе возможно иное выполнение сервоприводов 26, 27 и 30, обеспечивающее перемещение подвижных элементов 22, 24, 28 в горизонтальной плоскости (например, как в упомянутом выше патенте США №4398720).
На другом конце третьего подвижного элемента 28 установлены первый и второй захваты 31 и 32 с возможностью перемещения в вертикальном направлении. Эта возможность обеспечивается за счет первого и второго вертикальных сервоприводов 33 и 34, предназначенных каждый для перемещения в вертикальном направлении соответственно первого и второго захватов 31 и 32. Как видно на фиг.1, эти сервоприводы имеют на выходном валу зубчатые колеса, зацепляющие при своем вращении от соответствующих электродвигателей зубчатые рейки, к концам которых прикреплены захваты 31 и 32. Однако вполне возможно и иное выполнение сервоприводов 33 и 34, обеспечивающее перемещение захватов 31 и 32 в вертикальном направлении.
Сами захваты 31 и 32 выполнены каждый следующим образом. На основании 41 (42), которое крепится к соответствующей зубчатой рейке сервопривода 33 (34) на фиг.1, установлен серводвигатель 43 (44), на выходном валу которого жестко закреплен поворотный элемент 45 (46). На фиг.1 выходной вал серводвигателя 43 (44) направлен вертикально, поворотный элемент 45 (46) выполнен в виде диска, а основание 41 (42) имеет форму квадрата. В углах этого квадрата установлены стержни 47 (48), нижние концы которых могут смещаться к точке, лежащей под центром квадратного основания 41 (42). Такое смещение может обеспечиваться как за счет шарнирной подвески стержней 47 (48) за их верхние концы, так и при жестком прикреплении этих верхних концов к основанию 41 (42) за счет упругих свойств самих стержней 47 (48). Очевидно, что длина стержней 47 (48) выбирается так, чтобы самая высокая шахматная фигура не касалась нижней части основания 41 (42) или установленного на нем серводвигателя 43 (44) в зависимости от того, что из них находится ниже, когда нижние концы стержней касаются шахматной доски 11.
На нижних концах стержней 47 (48) можно устанавливать дугообразные элементы (не показано), касательная к каждому из которых перпендикулярна продольной оси данного стержня 47 (48). Этот дугообразный элемент является частью окружности, образуемой при сведении вместе нижних концов всех стержней 47 (48).
Упомянутые дугообразные элементы опциональны для шахматного робота по фиг.1. Гораздо важнее иметь на нижнем конце каждого стержня 47 (48) одну или две петли. Эти две петли расположены симметрично относительно продольной оси данного стержня 47 (48) и обращены каждая к одному из ближайших стержней 47 (48). Т.е. нижний конец стержня 47 (48) напоминает букву Ф. Например, одна петля на нижнем конце самого левого стержня 48 второго захвата 32 на фиг.1 «смотрит» на соседний стержень 48, находящийся справа, а другая петля этого же стержня 48 «смотрит» на соседний стержень 48, находящийся на фиг.1 позади самого левого стержня 48 и немного вправо от него. Разумеется, петли могут быть заменены любыми иными крепежными элементами, пригодными для крепления за них и пропускания через них тяг 50.
В том случае, когда каждый стержень 47 (48) снабжен на своем нижнем конце двумя петлями, одна из этих двух петель предназначена для закрепления нижнего конца соответствующей гибкой тяги 49 (50), а другая из этих двух петель предназначена для пропускания другой такой же гибкой тяги 49 (50), закрепленной нижним концом на соответствующем ближайшем стержне. Например, на нижнем конце самого левого стержня 47 первого захвата 31 на фиг.1 закреплен нижний конец гибкой тяги 49, которая затем пропущена через ближайшую петлю того стержня 47, который находится позади самого левого стержня 47 и немного вправо от него, и далее проходит вдоль этого ближайшего стержня, и закреплена другим своим концом на поворотном элементе 45. А через другую петлю самого левого стержня 47 на фиг.1 пропущена другая гибкая тяга 49, которая закреплена одним своим концом на стержне 47, находящемся справа от самого левого стержня 47. После пропускания через «свою» петлю на самом левом стержне 47 эта гибкая тяга 49 проходит вдоль самого левого стержня 47 и крепится другим своим концом на поворотном элементе 45.
Получается, что все гибкие тяги 49 (50) соединяют соседние стержни 47 (48) с одной и той же стороны: скажем, каждая гибкая тяга 49 (50) закреплена с левой стороны соответствующего стержня, если смотреть снаружи захвата 31 (32), когда данный стержень находится прямо перед смотрящим в центре поля зрения, и пропущена с правой стороны соседнего левого стержня 47 (48) и вдоль него к поворотному элементу 45 (46), тогда как гибкая тяга 49 (50), пропущенная через правый крепежный элемент данного стержня 47 (48) и вдоль него, закреплена с левой стороны соседнего правого стержня 47 (48).
Гибкие тяги 49 (50) могут быть сделаны из любого подходящего материала: это могут быть, к примеру, нитки, лески, тонкие проволочки и т.п. В варианте осуществления по фиг.1 все гибкие тяги 49 (50) крепятся к поворотному элементу 45 (46) в виде диска равномерно по его периферии.
В приведенном на фиг.1 примере основание 41 (42) имеет форму квадрата. Предпочтительно, чтобы расположенные по углам этого квадрата стержни 47 (48) проходили параллельно друг другу и ограничивали своими нижними концами квадрат, практически равный клетке используемой шахматной доски 11, либо немного меньший этой клетки, но чтобы в любом случае основание любой используемой шахматной фигуры могло поместиться внутри квадрата, ограниченного нижними концами стержней 47 (48). Понятно, что число n стержней 47 (48) может быть любым не меньше трех для надежной фиксации фигуры и шире предмета, который необходимо захватить. При этом стержни следует располагать по углам равностороннего n-угольника, вписанного в основание 41 (42).
Серводвигатель 43 (44) может быть установлен на основании 41 (42) и так, что его выходной вал расположен горизонтально. В этом случае поворотный элемент 45 (46) может быть выполнен в виде прямого поводка, одним своим концом закрепленного на выходном валу серводвигателя 43 (44), тогда как другой его конец, отходящий перпендикулярно от вала, используется для закрепления верхних концов всех гибких тяг 49 (50). При этом целесообразно размещать серводвигатель 43 (44) так, чтобы поворачивающийся конец прямого поводка находился вблизи центра основания 41 (42) для равномерного натяжения всех гибких тяг 49 (50) при вращении серводвигателя 43 (44).
В принципе все сервоприводы и серводвигатели могут быть снабжены понижающими редукторами, выходные валы которых являются выходными валами соответствующих сервоприводов или серводвигателей.
Два захвата 31 и 32, показанные на фиг.1, используются только тогда, когда во время очередного хода необходимо «взять» какую-либо фигуру противника, поставив затем на ее место свою фигуру. Однако такой ход можно сделать и в два этапа: сначала взяв чужую фигуру и сняв ее с доски 11, а затем поставив на ее место свою фигуру. В этом случае можно ограничиться лишь одним захватом 31′. Понятно также, что подвижный элемент 28, названный на фиг.1 третьим, может оказаться вторым, если вместо двух подвижных элементов 22 и 24 используется один телескопический подвижный элемент 22′. Это, однако, не влияет на объем притязаний по настоящему изобретению, а относится лишь к различным возможным вариантам осуществления манипулятора 13.
Работа робота с манипулятором 13, показанного на фиг.1, осуществляется следующим образом.
По сигналам распознавания местоположения и типа фигур соответствующая программа в компьютере 12 постоянно отслеживает ситуацию на шахматной доске 11. Соответствующая игровая программа компьютера 12 выдает команду на очередной ход, которая передается в программу управления манипулятором 13 для перемещения фигур.
Сначала эта программа управления передает команды на соответствующие сервоприводы 26, 27, 30 для перемещения одного из захватов - пусть это будет первый захват 31 (а если используется только один захват, то захват 31′) - в положение над соответствующей клеткой шахматной доски 11 с фигурой, выбранной для очередного хода игровой программой. При этом предпочтительное исходное параллельное расположение четырех стержней 47 захвата 31 по углам выбранной клетки обеспечивает возможность безопасного захвата выбранной шахматной фигуры без воздействия (сдвигания, расталкивания) на соседние фигуры.
Дальше манипулятор 13 остается в выбранном положении путем подачи команд фиксации на сервоприводы 26, 27, 30 и начинается работа захвата, проиллюстрированная отдельно на фиг.2.
Сначала (фиг.2а) по команде из компьютера 12 включается вертикальный сервопривод 33, вращение которого приводит к опусканию захвата 31 нижними концами стержней 47 практически до поверхности шахматной доски 11. При этом стержни 47 оказываются (фиг.2б) расположенными вокруг выбранной шахматной фигуры (на фиг.2 это пешка) практически по углам занимаемой ею клетки. После этого по команде от компьютера 12 включается серводвигатель 43, вращающий на заданный угол поворотный элемент 45. За счет этого верхние концы гибких тяг 49 вытягиваются вверх, сближая нижний конец каждого из стержней 47, к которому конкретная гибкая тяга 49 прикреплена, к нижнему концу соседнего стержня 47, через петлю которого данная тяга 49 пропущена. В итоге нижние концы всех стержней 47 сдвигаются в направлении точки, лежащей под центром равностороннего n-угольника (в данном случае - квадрата), по углам которого закреплены стержни 47, т.е. сближаются друг с другом, захватывая оказавшуюся между ними шахматную фигуру (фиг.2в). Серводвигатель 43 остается включенным (или по меньшей мере застопоренным), чтобы не ослаблять натяжение гибких тяг 49.
Вслед за этим вертикальный сервопривод 33 включается на вращение в обратную сторону, и основание 41 со сведенными стержнями 47, зажавшими выбранную фигуру, поднимается на исходную высоту, достаточную для горизонтального перемещения над остальными фигурами, стоящими на доске 11. Далее компьютер 12 подает соответствующие команды на горизонтальные сервоприводы 26, 27, 30, которые перемещают манипулятор 13 в положение над другой клеткой шахматного поля 11, выбранной для указанного игровой программой хода. Горизонтальные сервоприводы 26, 27, 30 стопорятся, снова включается вертикальный сервопривод 33, и захват 31 с зажатой стержнями 47 фигурой опускается на выбранную клетку (фиг.2в). После этого серводвигатель 43 выключается (или с него снимается сигнал стопорения), и упругие стержни 47 сами упруго возвращаются в свое исходное положение, освобождая ранее захваченную фигуру (фиг.2б). Далее вертикальный сервопривод 33 поднимает захват 31 (фиг.2а), и манипулятор 13 отводится в исходное положение по соответствующим командам с компьютера 12.
Использование минимально упругих стержней 47 (48), жестко закрепленных своими верхними концами в основании 41 (42) предпочтительно, т.к. при этом стержни 47 (48) будут сами возвращаться в свое исходное состояние (параллельно друг другу) после выключения серводвигателя 43 (44). Это, однако, не исключает возможности шарнирной подвески стержней 47 (48) за свои верхние концы на основании 41 (42) так, чтобы они имели возможность разойтись под действием собственного веса при выключении серводвигателя 43 (44).
Если в шахматном роботе используются два захвата 31 и 32, можно осуществлять ход со взятием фигуры противника за один прием. В этом случае сначала манипулятор 13 захватывает «ходящую» фигуру, например, первым захватом 31 по уже описанному алгоритму, после чего захват 31 поднимается и манипулятор 13 перемещается горизонтальными сервоприводами 26, 27, 30 так, чтобы второй захват был ориентирован над конечной клеткой данного хода с фигурой противника, которую на этом ходу следует «взять». Далее повторяется уже описанный процесс захватывания этой фигуры и подъем второго захвата 32. После этого, при неизменном положении первого и второго подвижных элементов 22, 24 манипулятора 13 (в примере по фиг.1), третий подвижный элемент 28 поворачивается третьим горизонтальным сервоприводом 30 на шарнирном креплении 29 так, что над клеткой, где стояла взятая фигура противника, оказывается первый захват 31 с зажатой фигурой. После этого первый захват 31 опускается, освобождает зажатую в нем фигуру и поднимается в исходное положение. Затем манипулятор 13 перемещается в положение вне шахматной доски, в котором должна оказаться взятая фигура, опускает второй захват 32 и отпускает взятую фигуру так, как ранее описано для первого захвата 31. После этого манипулятор 13 возвращается в свое исходное положение.
Программа управления манипулятором может предусматривать выдачу команд, по которым манипулятор по завершении очередного хода «сводит» вместе стержни 47 (48) какого-либо захвата 31 (32) без захватывания фигуры, перемещается в заданное положение и сжатыми стержнями 47 (48) нажимает соответствующую клавишу шахматных часов, если игра идет на время. После этого манипулятор 13 может вернуться в исходное положение.
Поскольку в манипуляторе 13 предусмотрено только горизонтальное перемещение подвижных элементов 22, 24, 28, требуемые от сервоприводов 26, 27, 30 усилия невелики и во всяком случае существенно меньше тех, которые были бы необходимы, если бы перемещение происходило в вертикальной плоскости. Поэтому сервоприводы 26, 27, 30 могут иметь минимальный вес.
Сведение нижних концов стержней 47 (48) с помощью гибких тяг 49 (50), одновременно и равномерно натягиваемых путем вращения поворотного элемента 43 (44), обеспечивает одинаковое отклонение всех стержней 47 (48) к середине клетки (к точке, лежащей под центром равностороннего n-угольника, по углам которого зафиксированы стержни 47 (48)). Это гарантирует, при должной начальной юстировке робота (манипулятора 13), что выбранная фигура будет надежно захвачена этими стержнями 47 (48). Даже некоторый сдвиг фигуры в пределах клетки не помешает этому захватыванию, поскольку при своем сведении стержни 47 (48) автоматически отцентрируют основание фигуры относительно той точки, к которой они сходятся. Предпочтительное число n стержней 47 (48), равное четырем, и малый диаметр стержней, необходимый для того, чтобы их можно было отклонить небольшим усилием от натяжения гибких тяг 49 (50), обеспечивают возможность захватывания выбранной фигуры даже в окружении близко стоящих шахматных фигур вследствие круглой формы их оснований, оставляющей достаточные зазоры между фигурами для опускающихся стрежней 47 (48). Выполнение стрежней 47 (48) достаточно тонкими, а также использование гибких тяг 49 (50) в виде нитей позволяет использовать менее мощный и более легкий серводвигатель 43 (44).
Таким образом, конструкция захвата и всего манипулятора, а следовательно, и робота получается более легкой и более простой, чем в ближайшем аналоге.
Наличие двух захватов 31 и 32 дает возможность ускорить игру, т.к. ход со взятием фигуры противника можно выполнять за один «проход» манипулятора 13. Манипулятор может нажимать клавишу шахматных часов, если игра идет на время. Кроме того, описанный робот можно использовать даже для начальной расстановки шахматных фигур на доске. Тем самым универсальность захвата, манипулятора и робота повышается.
Очевидно, что описанный робот для игры в шахматы можно использовать и для игры в шашки, го и иные настольные игры. Для этого достаточно перепрограммировать компьютер 12, т.е. ввести в него соответствующие игровые программы и программы распознавания местоположения и типа используемых фигур, а также заменить доску 11 на такую, которая пригодна для соответствующей игры. В некоторых случаях может потребоваться смена захватов, если поля выбранной доски окажутся больше или меньше шахматных клеток либо размеры фигур будут больше или меньше шахматных.
В принципе описанный захват можно использовать для захватывания любых предметов, в том числе и неправильной формы. Для этого следует выбрать число n стержней равным, к примеру, 6 или 8, хотя вполне приемлемы и такие нечетные числа, как 5 или 7.
Хотя заявленное изобретение представлено в данном описании примерами своего предпочтительного осуществления и проиллюстрировано сопровождающими чертежами, специалистам понятно, что возможны различные модификации, дополнения и замены без отхода от объема и сути настоящего изобретения. Объем притязаний по настоящему изобретению определяется лишь приложенной формулой изобретения с учетом возможных эквивалентов.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМБИНИРОВАННЫЙ МАНИПУЛЯТОР РОБОТОХИРУРГИЧЕСКОГО КОМПЛЕКСА | 2019 |
|
RU2721485C1 |
| Способ управления исполнительным механизмом робота-манипулятора с силомоментной обратной связью и устройство для его осуществления | 2018 |
|
RU2699703C1 |
| УСТРОЙСТВО ДЛЯ ОБЪЕМНЫХ ЛОГИЧЕСКИХ ИГР "СПЕЙС ЧЕСС" | 1992 |
|
RU2097086C1 |
| "Настольная игра "Перестройка" | 1990 |
|
SU1788905A3 |
| Манипулятор внутрикамерный | 2021 |
|
RU2785920C1 |
| СИСТЕМА УПРАВЛЕНИЯ ТАКТИЧЕСКИМИ ДЕЙСТВИЯМИ СПОРТИВНОЙ КОМАНДЫ В РЕАЛЬНОМ ВРЕМЕНИ | 2013 |
|
RU2566942C2 |
| Манипулятор | 1983 |
|
SU1304741A3 |
| Устройство управления манипуляторами роботохирургического комплекса | 2020 |
|
RU2757969C1 |
| НАСТОЛЬНАЯ ИГРА | 1992 |
|
RU2047302C1 |
| Манипулятор | 1980 |
|
SU869931A1 |

Изобретение относится к робототехнике, а именно к манипуляторам с захватом и роботам для настольных игр. Захват включает основание с неподвижно установленным на нем серводвигателем, поворотный элемент, стержни и гибкие тяги. Каждый стержень снабжен, по меньшей мере, одним крепежным элементом. Каждая гибкая тяга закреплена одним своим концом на крепежном элементе соответствующего стержня. Манипулятор содержит платформу, по меньшей мере один подвижный элемент, по меньшей мере один захват, горизонтальные сервоприводы по меньшей мере по числу подвижных элементов и вертикальные сервоприводы по числу захватов. Подвижный элемент установлен одним своим концом на платформе с возможностью вращения в горизонтальной плоскости. Захват установлен на другом конце соответствующего подвижного элемента с возможностью перемещения в вертикальном направлении. Робот содержит манипулятор, доску с распознаванием местоположения и типа фигур настольной игры и компьютер. В память компьютера введены программа для считывания сигналов распознавания местоположения и типа фигур, по меньшей мере одна игровая программа и программа управления упомянутым манипулятором. Технический результат заключается в упрощении и облегчении конструкции захвата, а также обеспечении его универсальности и использующих этот захват манипулятора и робота. 3 н. и 11 з.п. ф-лы, 2 ил.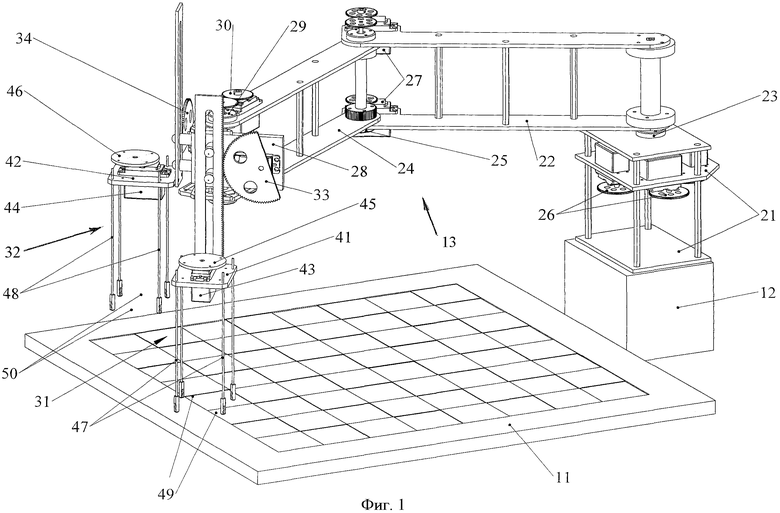
1. Захват манипулятора, включающий основание с неподвижно установленным на нем серводвигателем, поворотный элемент, жестко закрепленный на выходном валу серводвигателя, n стержней, прикрепленных своими верхними концами в углах равностороннего n-угольника, вписанного в основание, с возможностью отклонения нижних концов всех n стержней к точке, лежащей под центром упомянутого равностороннего n-угольника, при этом каждый из n стержней снабжен на нижнем конце, по меньшей мере, одним крепежным элементом, n гибких тяг, каждая из которых закреплена одним своим концом на крепежном элементе соответствующего из n стержней, перекинута через крепежный элемент ближайшего стержня, расположенного с одной и той же стороны для любого из n стержней, проходит вдоль этого ближайшего стержня и закреплена другим своим концом на упомянутом поворотном элементе, где n>3.
2. Захват по п.1, в котором n=4.
3. Захват по п.1, в котором каждый из n стержней имеет на своем нижнем конце дугообразный элемент, касательная к которому перпендикулярна продольной оси данного стержня и который является частью окружности, образуемой при сведении вместе нижних концов всех n стержней.
4. Захват по п.1, в котором каждый из упомянутых крепежных элементов представляет собой петлю.
5. Захват по п.1, в котором каждый из n стержней имеет на своем нижнем конце две петли, расположенные симметрично относительно продольной оси данного стержня и обращенные каждая к одному из ближайших стержней, причем одна из этих двух петель предназначена для закрепления нижнего конца соответствующей гибкой тяги, а другая из этих двух петель предназначена для пропускания гибкой тяги, закрепленной нижним концом на соответствующем ближайшем стержне.
6. Захват по п.1, содержащий серводвигатель, установленный на упомянутом основании так, что его выходной вал направлен перпендикулярно к плоскости основания, а гибкие тяги закреплены своими концами равномерно по периферии поворотного элемента.
7. Захват по п.1, содержащий упомянутый серводвигатель, установленный на упомянутом основании так, что его выходной вал направлен параллельно к плоскости основания, а гибкие тяги закреплены своими концами в одной точке упомянутого поворотного элемента.
8. Захват по п.6 или 7, содержащий серводвигатель, снабженный понижающим редуктором, выходной вал которого является выходным валом серводвигателя.
9. Манипулятор, содержащий неподвижную платформу, по меньшей мере, один подвижный элемент, шарнирно установленный одним своим концом на упомянутой неподвижной платформе с возможностью вращения в горизонтальной плоскости, по меньшей мере, один захват по п.1, установленный на другом конце соответствующего подвижного элемента с возможностью перемещения в вертикальном направлении, горизонтальные сервоприводы, по меньшей мере, по числу подвижных элементов, предназначенные каждый для перемещения в горизонтальной плоскости соответствующего подвижного элемента, вертикальные сервоприводы по числу захватов, предназначенные каждый для перемещения в вертикальном направлении соответствующего захвата.
10. Манипулятор по п.9, содержащий один подвижный элемент, выполненный телескопическим, первый горизонтальный сервопривод, предназначенный для его поворота относительно шарнирного закрепления одного конца упомянутого элемента, второй горизонтальный сервопривод, предназначенный для изменения длины упомянутого элемента, один захват по п.1, установленный на другом конце телескопического подвижного элемента с возможностью перемещения в вертикальном направлении, и один вертикальный сервопривод, предназначенный для перемещения в вертикальном направлении упомянутого захвата.
11. Манипулятор по п.9, содержащий первый подвижный элемент, установленный одним своим концом с возможностью вращения в горизонтальной плоскости, второй подвижный элемент, шарнирно установленный одним своим концом на другом конце первого подвижного элемента с возможностью вращения в горизонтальной плоскости, один захват по п.1, установленный на другом конце второго подвижного элемента с возможностью перемещения в вертикальном направлении, первый и второй горизонтальные сервоприводы, предназначенные каждый для перемещения в горизонтальной плоскости одноименных подвижных элементов и один вертикальный сервопривод, предназначенные для перемещения в вертикальном направлении упомянутого захвата.
12. Манипулятор по п.9, содержащий первый подвижный элемент, выполненный телескопическим, второй подвижный элемент, шарнирно установленный одним своим концом на другом конце первого подвижного элемента с возможностью вращения в горизонтальной плоскости, первый и второй упомянутые захваты по п.1, установленные каждый на другом конце второго подвижного элемента с возможностью перемещения в вертикальном направлении, первый горизонтальный сервопривод, предназначенный для поворота первого подвижного элемента относительно шарнирного закрепления одного его конца, второй горизонтальный сервопривод, предназначенный для изменения длины первого подвижного элемента, и первый и второй вертикальные сервоприводы, предназначенные каждый для перемещения в вертикальном направлении одноименного захвата.
13. Манипулятор по п.9, содержащий первый подвижный элемент, шарнирно установленный одним своим концом на неподвижной платформе с возможностью вращения в горизонтальной плоскости, второй подвижный элемент, шарнирно установленный одним своим концом на другом конце первого подвижного элемента с возможностью вращения в горизонтальной плоскости, третий подвижный элемент, шарнирно установленный одним своим концом на другом конце второго подвижного элемента с возможностью вращения в горизонтальной плоскости, первый и второй упомянутые захваты по п.1, установленные каждый на другом конце третьего подвижного элемента с возможностью перемещения в вертикальном направлении, первый, второй и третий горизонтальные сервоприводы, предназначенные для перемещения в горизонтальной плоскости одноименных подвижных элементов, и первый и второй вертикальные сервоприводы, предназначенные каждый для перемещения в вертикальном направлении первого и второго захватов, соответственно.
14. Робот для настольных игр, содержащий манипулятор по п.9, доску с распознаванием местоположения и типа фигур соответствующей настольной игры и компьютер, в память которого введены программа для считывания сигналов распознавания местоположения и типа фигур с упомянутой доски, по меньшей мере, одна игровая программа, предназначенная для проведения соответствующей настольной игры с учетом распознанных местоположений и типов фигур, и программа управления упомянутым манипулятором для перемещения фигур по сигналам от упомянутой игровой программы.
| US 4398720 А, 16.08.1983 | |||
| RU 2003117339 А, 20.12.2004 | |||
| CN 1524665 А, 01.09.2004 | |||
| Генератор | 1986 |
|
SU1385224A1 |

