2. Манипулятор ип п . 1 . г i и --гш пси;ч ;- -. : ; ;;;
ч а ю 1:( i:; и с я там,, что ось iunp:in- рглнк;; ;.Г::;-. чг-.:--- ... -:
ра, сничызающего ) ;.: -:;---менее 1яти л .ч--- -i:v.. ,., -.;; вяиием. paiMeiueiia ниже ;:.iiU ;ко;-ги , ..-:я-1 ор ;;с :.:. ;i ; .. i;
гфо о ятией через оси золило1;1 r cuoiin - а ы i:i и л - с --, -,: я..- ,;..,
„ия нп DfiCCTOfiHHii i/36 ;ша 1ето;ь ТИК-с.рвого чнс;. ггт.ии:р. -юм чне: ча расст -:я ;1И с:т :ч;и 1;:.. сое- роли ко.-. .,-..
I , т ,. -. 1; iiiMiiimero :сэовпе ijitcti en i-c.:;.::- -;нсJ, Г :аг1.и11улятор МО ч а ю .ц лис
я тем. что Р О-чо:ч. равном радиусу ci o c осликл
ликов ос юваиия составляет 4/5 ;;.иа--юскости, .:ол-1:с;: acpf
метра ролика первого -члена, а рас-аиров, сия- n-ai i;ii,i . . .e,)i-.. f
стояние --{ежду осьи) и:арнира . с ипьлип-иу аниеь и :. и -пр
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ПРИВОДА С СЕРВОМЕХАНИЗМОМ ДЛЯ МНОГОСКОРОСТНОЙ КОРОБКИ ПЕРЕДАЧ ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2537098C2 |
| Станок В.И. и К.В.Ефимчевых для раскалывания бревен на заготовки | 1987 |
|
SU1507569A1 |
| Устройство для подачи воды к дождевальной машине в движении | 1984 |
|
SU1367834A3 |
| Вакуумный манипулятор | 1990 |
|
SU1754442A1 |
| Ленточно-шлифовальный станок | 1982 |
|
SU1324578A3 |
| Устройство для санирования неоткапываемых трубопроводов | 1989 |
|
SU1831633A3 |
| КОФЕВАРКА (ВАРИАНТЫ) | 1988 |
|
RU2086169C1 |
| Маневровое устройство для литейных установок | 1984 |
|
SU1336944A3 |
| Машина для формования стельки и прикрепления ее к следу колодки | 1982 |
|
SU1321359A3 |
| Устройство для контроля и сортировки линз | 1980 |
|
SU910231A1 |
li jcioijc гсмиа от-1оснт :л а Ma.i;iia :.i
CT pos.amio., Б част;- ости к мапи 1у:;яго петы-:;-:
,. :тре;л;1.п: иаче;-;;)ЫМ .vurii обс.л :аина -п.с аиено
а. ал-uiaiax .погилес ; :-: ir.i.. о л с)жач еля:
сов , аПервое
, лчобретсни ; - коя I liCUHC гоааоворачин;
НОСТТ1 ;ГСЛ- ИЦ :ОНИРОВ;1;1;-1И . i с Л1
ila :)Л , схематически ..i:.io6;:)a;KCii- о1Ч} с:ерЗ(
;v,:j({HI ...ЛИПЛЛ. , siK ,, Па. фИ С - В )СВ(Я
;.;л;;а: :а глаеская лечь лерелачи /дпиле--- L: л.слств;
htiw О .; , ч1:лп ел ; лалииуля гора Гч чч/с-м/орой ксс
1Л;е.У звену и ;;ep:;vaTcj. eix -(лслруькчлч .-;. к :
) зпсна в котором рлвлеи-Сг лар laropoe
жа. ге.ть 1-п5СТру мел Л1 с вч орым звено;--: -Зьггь лслзе
и УТ1 рав.ляки:и- ми сч ержлями; на фмгл- го жг, :зи,л сверху; ;-а фигл Ь о;.Ил
1-л двиа;ггел:е 1 мачлпулялор з., релставляюшил ссл ;о;1 серло:-.. а разрезе.-;.,-.., --яги i/
чч рез его -;ь; :л:;ленла го ;у а :;зможноС ;л:К1 1--I 20, .иругсч
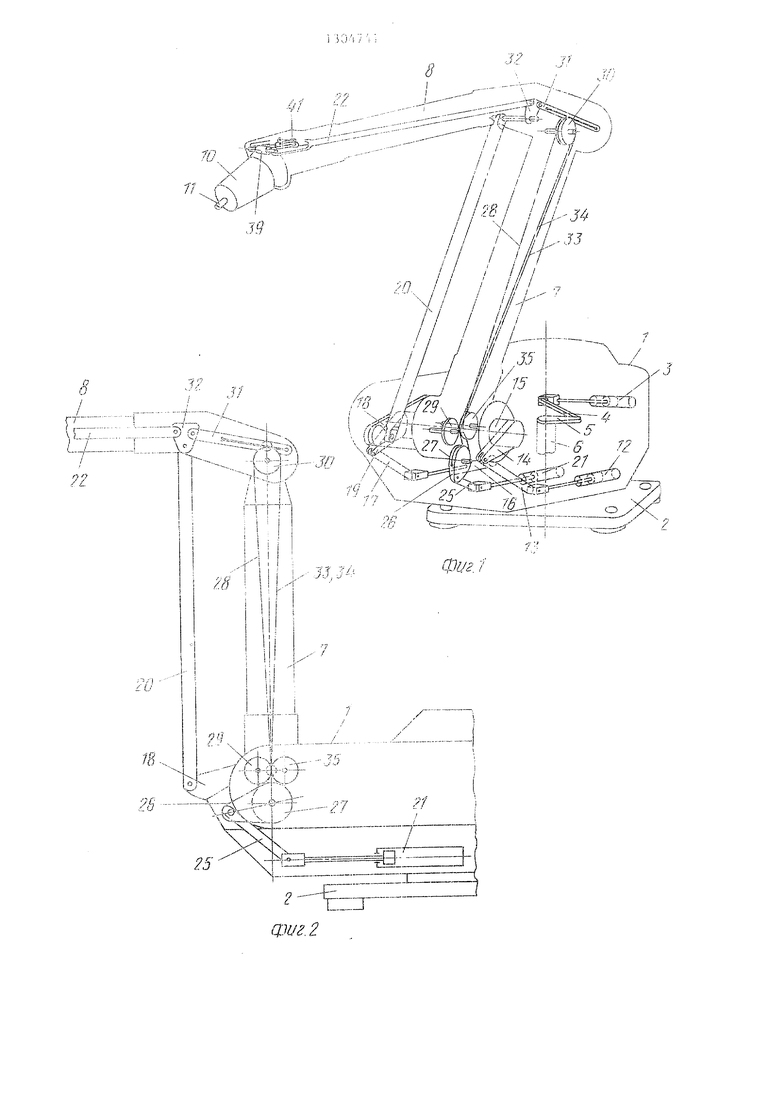
Маичпулятор содержи лслола11ке ..,,, .. ,,о.,,оп,1,
.лениое с ;чозмо ки(.л-чвю .враще- .,,,,|,.,,..,.„,,,,.. НИН на о торчой гичк132 2, чричак :-ia4i - пуллча.);; может 1:ояорач .иач ься с ao--io- П1ью нерпого г идрав.пическ( .ч;ч С срнол-i- 3, расположепиого в ол11овачли
1 и действующего через тягу -4 на. пер--30основант- Ij третье звено iO манилувый коз;енчатый рычаг 5, г-:рикреплен-ля.тора может бЬ)Ть повернуто на опрекый к фиксированному валу 6 основал-деленный угсл в .n;-o6c:iM направлении отния 1. Один конец первого звена 7 ма-(-юсительно второго звена 8, а держанипулятора установлен с возможностьютель инструмента 1 может поворачиврашения на основаник , а другой 35ваться вокруг своей прод-ольной оси.
конец первого звена 7 манипулятораДля болыг-:ей ясности на фиг , 2 изобшарнирно связан с вторым звеном 8,р. шена только одна из трех упомянудругой конец которого .н черезтых кинематических цепей ,iyiH передачи
313
усилия с гидравлическим сервонилинд- ром 21.
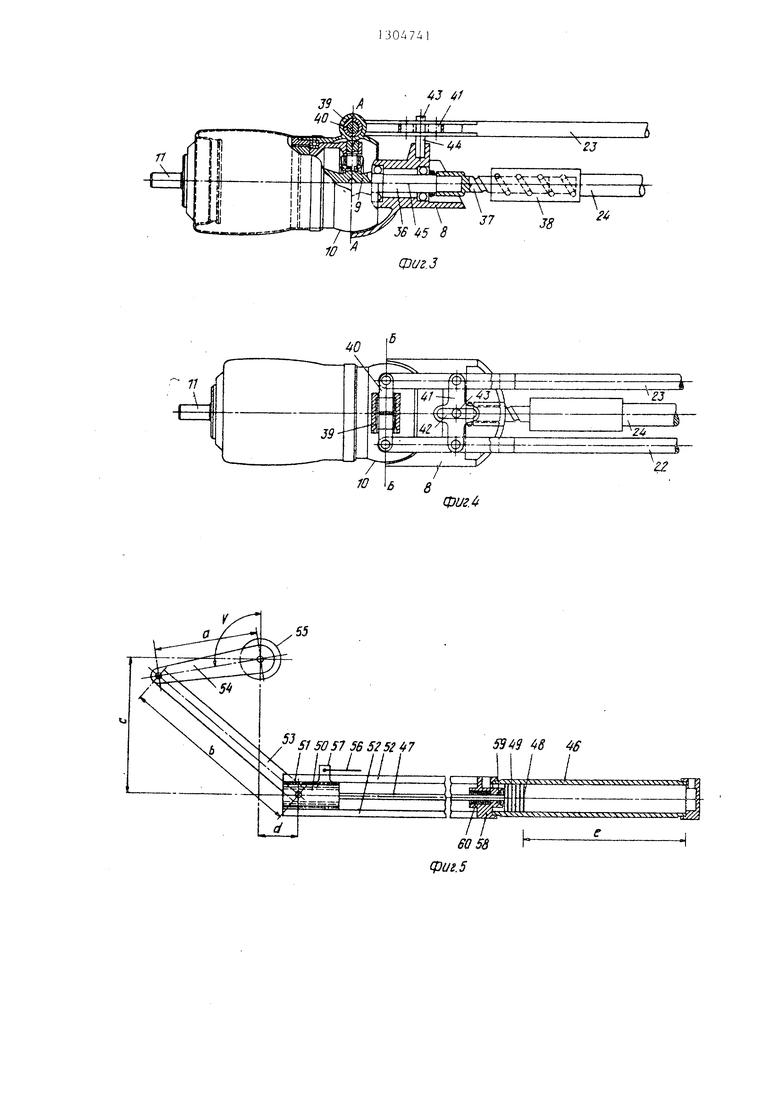
Перемещения третьего звена 10 вызываются двумя продольно перемещаемыми управляющими стержнями, размещен- ными на втором звене 8 манипулятора, из которых для большей ясности на фиг,1 показан только один (позиция 22). Второй из упомянутой пары управляющих стержней изображен на фиг.З и 4 и обозначен позицией 23.
Вращение держателя инструмента 11 вокруг его продольной оси ос чцествля- ется с помощью третьего управляющего стержня 24 (фиг.З и 4).
Все управляющие стержни кинематически связаны с соответствующими гидравлическими сервоцилиндраьш 21.
Шток порщня сервоцилиндра 21 прикреплен с помощью оси к одному концу тяги 25, другой конец которой присоединен с помощью оси к выступу 26 на блоке 27, который с помощью оси -смонтирован в основании 1 и который одновременно выполняет роль коленчатого рычага. Блок 27 огибает закрепленный на нем одним своим концом первый гибкий элемент 28, который далее своей внещней стороной касается ролика 29, установленного на оси в основании 1, и огибает ролик 30, установленный на оси в первом звене 7 манипулятора под шарниром, связывающим первое 7 и второе 8 звенья. Второй конец гибкого элемента 28 закреплён на конце тяги 31, другой конец которой щарнир- но связан с рычагом 32, который в свою очередь установлен на оси во втором звене 8 манипулятора. К рычагу 32 присоединен с помощью шарнира
также и конец стержня 22. I
Кроме того, к блоку 27 прикреплены концы второго 33 и третьего 34 гибких элементов, которые также оги- бают блок 27, но с противоположной стороны от гибкого элемента 28, которые проходят через ролик 35, установленный в основании 1, и через ролик 30, Другие концы этих гибких элемен- тов закреплены на тяге 31 около щар- нира, связывающего ее с рычагом 32. Таким образом, гибкие элементы 33 и 34 на всем пути оказываются параллельными. Гибкий элемент 28 по всему пути своего прохождения расположен в плоскости, перпендикулярной осям вращения блока 27 и роликов 29, 30 и 35, и проходит между гибкими элементами 33 и 34, расположены н параллельных плоскостях. В результате того, что гибки элемент 28 проходит между вторьм 33 и третьим 34 гибкими элементами, и под углом к их направлению у Bepxnei i части ролика 30, напряжение, которое возникает в тяге 31 под воздействием гибких элементов, не является перекашивающим. Тяга 31 снабжена поворотными для крепления гибких элементов (не показаны),
К1-п)ематическая цепь привода звеньев манипулятора спроектирована таким образом, что г:ерлое знеио 7 ;ожот быть повернуто (относительно оспоьа- ния 1 , а второе 3nei;o 8 - относительно звена 7 бея воздействия нп гибкие элементы 28, 33 и 34 и соответственно -:а управляющий стерже; ь. Это достигается благодаря , ро.днки 29 и 35 установлены ; основании 1 на paвнo i или практически равно ; расстоянии от Nsecra установки в основании 1 блока 27; л тг:кже о.чаг одаря тому, что первое звено 7 ;анипулятора установлено в основанп : I образом, что ось его вр; .шення располагается предпочтительно около плоскости проходящей через оси рол --:ков 29 и 33 например нике этой плоскости па расстоянии 1/36 диаметра роликов 29 и 35, причем ось враще1П1я первого звена 7 располагается н а одинаковом расстоянии от осей вращения ролнков 29 и 35, а диаметр роликов выбран таким что на них наматываются участки гибких элементов 28 или 33, 34 такой длины, что расстояние между роликами 29 и 35 соответственно н роликом 30 сокращается в результате дврБкения первого звена 7, а напряжение в гибких элементах поддерживается постоянным. В результате движения первого звена 7 манипулятора с роликами 35 и 29 отматывается часть гибких элементов 33, 34 или 28 такой дл)1ны, что расстояние между ними и роликом 30 увеличивается, причем напряжение s гибких элементах поддерживается постоянным. Это означает, что ролик 30 не вращается, а тяга 31 не получает продольного перемещения при перемещении первого звена относительно основания 1 . Ролик 30 установлен на первом звене 7 манипулятора на расстоянии от оси вращения звена 7 и звена 8 равном или практически равном ра5
ролика 30 в 1ч:1чкг- ;;
НИИ, соединяющей л-цомянутуч:
нмного н:рЯ1де {ия зпсиьеи v. с:
ния 7 основании , I nt
метр ролика 30 выбираете; таким мб т:;зом, а ось вращения рычаг, 32 ра.::полагается по отношению к oiзвеыьен 7 и 8 манипулл г орг
при пережлцении 8 оч
звена 7 часть длинь ги5ки
28, У и 3 i наматывается и перемлть;-ваетс .я соответственно на 4):1кк 50.
Когда расстояние между ос.ю вра1;1,
роли:-;а 30 и осью шарнира, связывагсигсI o рь чаг 32 и тягу 3 , меняемся з эезу.ги; : ате: переме де;1ия эне;,. 8 о ; И -с - TejifjHo ;;;зена / нагфяжв 1ие в гибких
элементах г оддержгшается i :ос гояи:/ы1м ,
т.е. 31 не нолучае г ; :род :; 1П;(5:иер(ч.1е1це ш ; п рпзу:тт тате :: speMei:ii;Vi: ::
зве; а В отт оснтел ;;i-o звена / к-п::-;; : уляч ора.
станоилено , что нредпочтнтел ьн,/: диаме- р1:1 pOJiviKOH 29 и 3;; ;1ЫбИ 5ат :;-) значением -5 диаметра ролик;; 30, pacc fOMiii-ie осью враденгчя зпепа 7 маничу.чя тора в осг овапил л В;за;ц(М1лЯ Ю. гика 30 ьыбира. -ь Л: кр;;: - неи I iepci в н;-ггь раз бо.
1 С. Т с: я .
и1- ;1НИК( к )р:. ух иым поиере ч ,, ; с.; 1 ьк) ;;};a :ifi :;-и рас пследнг ; не имес
ч,: iJII ;;Oru с:; leiilOlHr
inieiLi
с ролика.1и 29 и 33, звено / ется О | носительно основания делах донустимого лианазона тений,
Ман -тулятор работае - следуюУ1ИМ гкл разогл,
TpGTt.e звено 10 манипулятора -i держате/гь инструмента М иере;. е ца: ; Г - ся Tpeh:} продольно .;е1;|,аем)з;ми уи- рав1И1г01Я1-(ми стержн7П и 22, /:3 и ха, таков;:е -1Н лми з звене 3 ма. я::нул /торг:
Третье звено 10 манинулятора установлено с возможностью иог;орста от -а)
Б--Б мЪиг , 3 и ч) посредствс М urapffi-ipHo- го присоединения 9 к звену 8, расно- ложенного за валом 36, установленным с возможностью вращения в звене 8. причем передний конед вала вьпюлнен в виде, части шарнира 9. Вг нтовая н;а- резка 37 охватывается гайкой 38, прикрепленной к концу продольно перемещаемого управляющего стержня 24. Когда управляющий стержень 2t и, следовательно, гайка 38 продольно переме1вляюи.равлении. с:с1ипадающем с напразлентгем пepeмeщeни i управляющих стержней- 22 и 23, В 42 размещен свободный ко1;ед штифта 43, которь й жестко прикреплен к звену 8 манинулятора,
7 аким образом, продолжение осевой
линии 44 штифта 43 riepeceicaeT осевую л.инию 45 вала 36, Все серводилиндры манипулятора имекгт конструкпию, поз71
воляющую получить угловые перемещения звеньев манипулятора в прямой зависимости от хода поршней сервоци- линдров. Сервоцилиндры (фиг.5) имеют гильзу 46, шток 47, жестко присоеди- ненный к поршню 48, который снабжен уплотнительными желобами 49 (желобами распределения давления). Другим своим концом шток 47 жестко прикреплен к направляющей 50, приспособлен- ной скользить на опорах 51 с трением качения в фиксированных направляющих
с возможностью вращения валу 55, смонтированному в основании i робота манипулятора. Измерительная система сервоцилиндра (не показана) присоединена с помощью стальной проволоки 56 к выступу 57 на направляющей 58.
В результате того, что длина а коленчатого рычага 54 и длина Ь тяги
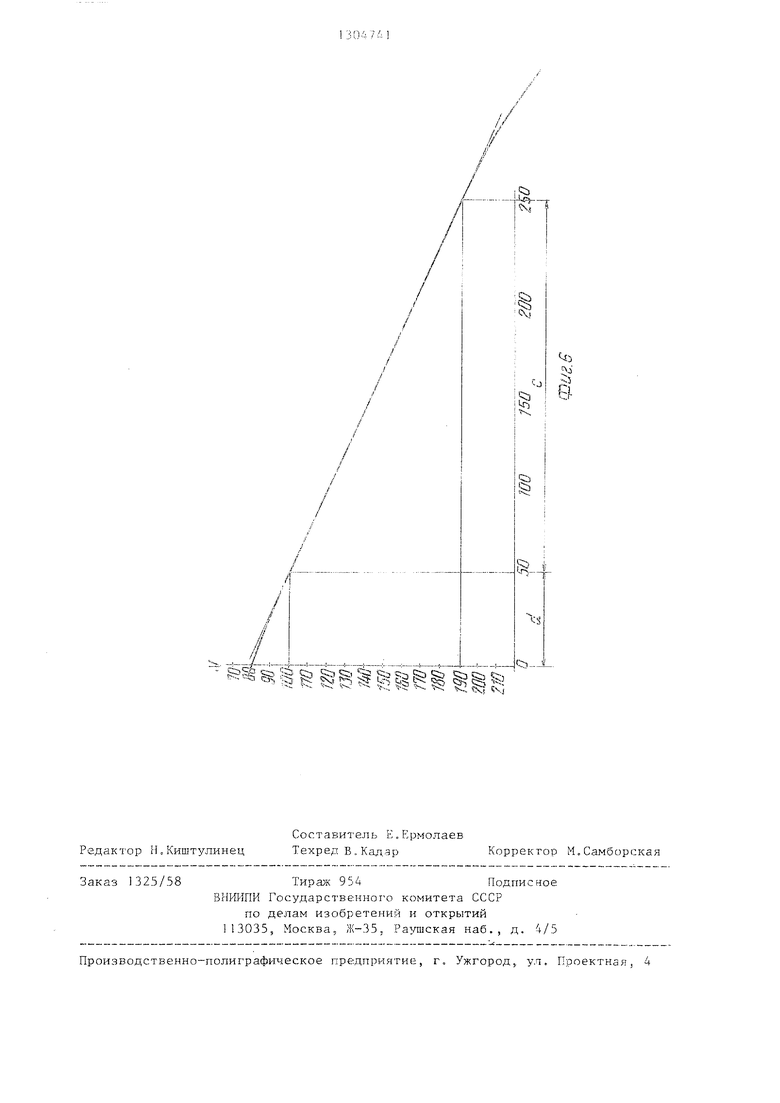
53,а также расстояние с между осью вращения вала 55 и осевой линией штока 47 находятся в диапазоне (в значениях а) от 1,8 о до l,33q по отношению один к другому, расстояние о меж- ду осью соединения тяги 53 и направляющей 50, когда ось находится в удаленной позиции, и точкой пересечения осевой линии штока 47 и осевой линии, перпендикулярной к ней и прохо- дящей через ось вращения вала 55, составляет 0,39 а , длина хода поршня сервоцилиндра составляет 1 ,66 а , достигается эффект, выражающийся в том, что линейное перемещение поршня сер- воциликдра преобразуется во вращательное движение вала 55 таким образом, что отношение между углом поворота вала 55 и соответствующим изменением в расположении поршня 48 сер- воцклиндра практически постоянно во всем рабочем диапазоне сервоцилиндра. Вьш1еописанная практически линейная
-П8
передача движегчия от сервоцилиндра к вращающемуся валу 55 графически изображена на фиг.6, где кривая в системе координат показывает значение угла поворота V в функции от расстояния между направляющей 50 и нормалью к осевой линии вала 55, когда длина хода поршня е сервоцилиндра установлена равной 200 мм.
1
Два практических параметров о и е отмечены на оси абсцисс.
В соответствии с изобретением трение между штоком 47 и уплотнением 59 поршневого стержня во всех падравли- ческих сервоц1-;линдрах манипулятора сведено к минимуму благодаря применению специального устройства, в :ото- ром диаметр штока 47 сокращен до размера, соответств тощего мeныl e г пределу прочности на изгиб для ип ока, свободно установленного общеизвестным способом. Со cTopOJiK штока серво- цилиндр снабжен направляющей 58, в которой кроме уплотнения 59 установлен роликовый подшипник 60. через который проходит ш ток 47. Роликовый подшипник 60 имеет таклао длину, что часть штока 47, находящаяся внутри роликового подшипника 60, в любой момент действует так, как если бы она была там фиксирована, В результате того, что шток 47 фиксирован обоими своими концами, удалось значительно сократить его диаметр по сравнению с диаметром штока, который в связи с возможностью изгиба был бы необходим, если бы шток 47 бььл свободно установлен по обоим его концам. Таким образом, удалось, например, сократить диаметр штока с 20 до 8 мм. Это означает, что длина ности поршневого стержия уменьшена с 62,8 до 25,1 мм. Поскольку трение между поршневым стержнем и уплотнением пропорционально давлению уплотнения на единицу площади, оно оказывается значительно сш-гженным.
€.
/
s,f ;
/ / / /I.
Hi
;
/ J
v.
, -/ .
---. ;Y(. -Wy1 - f -f-- /- irrX -- f : 5N Ж ЛгтШу ,0 j .-.ta- :/--- С;Ь... / /
. I.-.
Л,
4J 1
/4
Цзиг.З
77
59
515057 56 5252 7
48 46
ii ggSBi igiS:
Редактор Н.Киштулинец
Составитель Е.Ермолаев
Техред в.КадарКорректор М.Самборская
Заказ 1325/58
Тираж 954Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва. Ж-35. Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Патент США № 4259876, кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Приспособление для изготовления в грунте бетонных свай с употреблением обсадных труб | 1915 |
|
SU1981A1 |
