Изобретение описывает манипулятор для атомной промышленности, применяемый в условиях повышенной радиации. Особенностями манипулятора являются стойкость к поглощенной дозе порядка 1 МГр и более, а также возможность обеспечения герметичности среды, в которой находится исполнительный орган манипулятора.
Задачей изобретения является расширение возможностей радиационно-стойких манипуляторов путем включения в их кинематическую схему поступательных звеньев.
Известен "Дистанционный копирующий манипулятор" (SU590136, опубл. 30.01.1978) [1], задающий базовые принципы кинематики радиационно-стойкого манипулятора, приводные агрегаты которого вынесены за пределы биологической защиты, в то время как сам манипулятор находится в радиационно-опасной среде. Каждый шарнир такого манипулятора представляет собой механический дифференциал с двумя степенями свободы - углом тангажа и углом крена. Передача момента от приводов производится по двум телескопическим валам, приводящим в движение конические шестерни первой и второй ступени. Каждой шестерне соответствует дифференциальное коническое колесо, причем колеса четных ступеней расположены с одной стороны от плоскости поворота по тангажу, а колеса нечетных ступеней - с противоположной стороны. Кинематическая схема звена замыкается двойной шестерней, входящей в зацепление сразу с двумя дифференциальными колесами, в результате чего шарнир приобретает две степени свободы - поворот оси двойной шестерни (тангаж), и поворот вокруг оси двойной шестерни (крен). Угол поворота по тангажу определяется полусуммой углов поворота дифференциальных колес, а угол поворота по крену - полусуммой углов поворота приводных шестерен, в целом же узел реализует взаимно однозначное линейное преобразование углов поворота входных шестерен в углы поворота шарнира. При необходимости, одна из двух степеней свободы может быть устранена закреплением соответствующего дифференциального колеса на корпус шарнира. Применение шарниров такой конструкции совместно с телескопическими валами позволяет построить манипулятор с любым числом вращательных степеней свободы. Ключевым преимуществом этой схемы является огромная радиационная стойкость манипулятора, ограниченная только стойкостью металлических деталей и смазки (при ее наличии). Благодаря этому преимуществу, описанная схема построения манипулятора не имеет альтернатив в областях применения с интегральной поглощенной дозой более 1 МГр, таких, как обращение с высокоактивными радиационными отходами, работы по ликвидации аварий с радиоактивным загрязнением, и работы с синтетическими высокоактивными изотопами.
Несмотря на преимущества общего подхода к построению манипулятора, решение SU590136 содержит существенные недостатки. В первую очередь, к ним относятся большие значения люфтов, возникающие в конических передачах, и накапливающиеся от корневого звена к инструменту, так как в кинематической схеме все последующие передачи зависимы от предыдущих. Кроме того, все передачи являются открытыми, что приводит к потере смазки из зубчатых зацеплений, а также к засорению этой смазки пылевыми частицами, зачастую присутствующими в рабочей зоне. Также, в решении SU590136 не показано, каким образом можно осуществить разделение газовых сред между объемом рабочей зоны и той областью, в которой находятся двигатели манипулятора, то есть манипулятор не годится для использования в инертных камерах.
Известно также устройство управления исполнительным механизмом роботом-манипулятором с силомоментной обратной связью RU2699703, опубл. 09.09.2019 [2]. Устройство установлено на подвижной опоре в радиационно-защитной камере, содержит рукоятку управления, кинематически связанную с механическими узлами, обеспечивающими раздельное и одновременное перемещение рукоятки по трем взаимно перпендикулярным направлениям и вращение вокруг трех взаимно перпендикулярных осей. Устройство соединено с роботом-манипулятором через персональный компьютер, обеспечивающий его запуск и контроль. Механические узлы устройства выполнены в виде двух продольных приводов по оси X, одного перпендикулярного привода по оси Y, своими концами расположенного на продольных приводах, и одного вертикального привода по оси Z, своим концом расположенного на перпендикулярном приводе, причем продольные, перпендикулярный и вертикальный приводы снабжены шаговыми электродвигателями, а вертикальный привод посредством рычагов дополнительно соединен с тремя серводвигателями, обеспечивающими вращение рукоятки управления вокруг осей X, Y и Z.
Данное устройство обладает несколькими линейными степенями подвижности, включая вертикальную, что позволяет обеспечить вертикальность траектории конечного звена с высокой точностью, поскольку при перемещении вертикальной линейной степени погрешности возникают только из-за неровности направляющей, и эти погрешности на несколько порядков меньше, чем ошибка датчика обратной связи. Главным недостатком устройства с точки зрения применения в радиационно-химических производствах является размещение приводов непосредственно на манипуляторе, что значительно снижает его радиационную стойкость.
Наиболее близким по своей технической сути к рассматриваемому решению является «Манипулятор для атомной промышленности» (CN111890407, опубл. 06.11.2020) [3].
Манипулятор согласно этому изобретению применяется в радиационной среде и содержит двигатель и механическую руку, при этом механическая рука расположена в радиационной среде, двигатель расположен вне радиационной среды, механическая рука содержит шарнирные звенья и компоненты конической передачи, компоненты конической передачи расположены в шарнирных звеньях, количество шарнирных звеньев составляет по меньшей мере 1, один конец шарнирного звена, соединенный с двигателем, снабжен компонентами конической передачи, два конца других шарнирных звеньев снабжены компонентами конического зубчатого колеса, и количество конических зубчатых колес между двумя компонентами конического зубчатого колеса в одном и том же шарнирном звене отличается на 1; компоненты конического зубчатого колеса содержат по меньшей мере 1 коническую шестерню и опорные детали, оси конических зубчатых колес в одном и том же компоненте конического зубчатого колеса одинаковы, а смежные конические шестерни соединены через опорные детали, и узел конической шестерни расположен на заднем конце шарнирного звена, а коническая шестерня, расположенная на самой внешней стороне, неподвижно соединена с шарнирным звеном.
Особенностью данного манипулятора является использование не дифференциальных звеньев, а зубчатого конического зацепления с углом между осями 90°, при сохранении общего принципа компоновки концентрических валов. В результате каждый шарнир манипулятора реализует только одну степень свободы, а оси вращения шарниров оказываются скрещены в пространстве. Такое решение позволяет снизить люфты в зацеплении и повысить нагрузочную способность, благодаря возможности использования передач с круговым зубом, однако скрещенное положение осей приводит к возникновению другого недостатка - а именно, к увеличению требуемого угла поворота каждого шарнира при переориентации манипулятора сравнительно с компоновкой с пересекающимися осями.
Существенными признаками прототипа являются:
- манипулятор обладает звеньями, построенными с использованием конических зацеплений с возможностью регулировки, что обеспечивает снижение люфтов,
- рука манипулятора не содержит каких-либо электрических или электронных компонентов, и сформирована из шарниров, движение к которым подводится посредством концентрических валов от коробки отбора мощности, расположенной за корневым звеном манипулятора,
- все электрические и электронные компоненты манипулятора отделены от руки манипулятора теневой радиационной защитой,
- блок двигателей отделен от манипулятора уплотнением.
Наличие вышеописанных существенных признаков в совокупности с другими признаками, приведенными в описании прототипа, которые не являются существенными с точки зрения заявляемого изобретения, позволяет достичь высоких показателей радиационной стойкости и точности позиционирования, сохранив при этом требуемую подвижность манипулятора.
Описанный выше прототип, тем не менее, обладает рядом недостатков:
- кинематическая схема манипулятора, содержащая только вращательные звенья с поворотом по тангажу и рысканию, определяет шарообразную форму рабочей зоны, в то время как радиационно-защитные камеры обыкновенно имеют цилиндрическую либо призматическую форму, и в результате рабочая зона плохо вписывается в ограниченные объемы камеры - либо возникают повышенные требования к радиусу рабочей зоны (для случая описанного шара), либо не для всех обслуживаемых точек возможен удобный подход манипулятором (для случая вписанного шара),
- в качестве уплотнения используются герметизирующие кольцевые прокладки с «круговым или эллиптическим сечением», то есть уплотнения являются контактными, что обуславливает их износ и необходимость периодической замены, подразумевающую демонтаж манипулятора,
- сочетание концентрической компоновки валов и вращательного характера всех звеньев создает высокие нагрузки на зубья шестерен в каждом из шарниров, что ограничивает грузоподъемность манипулятора и его срок службы.
Для устранения отмеченных выше недостатков заявителем предлагается манипулятор внутрикамерный, который, как и ближайший аналог, обладает звеньями, построенными на основании вращательных дифференциалов, а его рука манипулятора не содержит каких-либо электрических или электронных компонентов, и сформирована из шарниров, движение к которым подводится посредством концентрических валов от коробки отбора мощности, расположенной за корневым звеном манипулятора. В отличие от ближайшего аналога, манипулятор внутрикамерный обладает следующими особенностями:
- в состав манипулятора входят также два линейных звена, одно горизонтальное и одно вертикальное, каждое из которых представляет собой дифференциальную пару винтовой передачи и вращения,
- ввод движения в радиационно-защитную камеру производится через зеркало смазывающей жидкости, утечки которой непрерывно восполняются насосом, организующим циркуляцию жидкости по замкнутому контуру, причем в концентричных валах манипулятора выполнены отверстия, достаточные по диаметру для равномерного заполнения всех зазоров между концентричными валами манипулятора смазочной жидкостью,
- для предотвращения возможных аварий, вызванных отказом насоса восполнения утечки между двигателями и механической рукой манипулятора установлены торцовые уплотнения, срабатывающие в случае понижения уровня уплотняющей жидкости ниже определенного предела,
- для подключения двигателей в манипуляторе предусмотрены муфты с быстроразъемными соединениями, например, метрическими конусными втулками, для быстрой установки и смены мотор-редукторов, а корпуса мотор-редукторов оснащены механическим интерфейсом, позволяющим некоему стороннему манипулятору захватывать и перемещать их.
В результате применения предлагаемого технического решения достигается следующий технический результат:
- рабочая зона манипулятора становится цилиндрической, и лучше вписывается в габариты радиационно-защитной камеры,
- благодаря наличию вертикального линейного звена люфты не оказывают влияния на точность хода по вертикали,
- благодаря тому, что основной вес манипулятора и груза воспринимается наибольшим по диаметру валом вертикальной ступени, грузоподъемность манипулятора существенно возрастает,
- достигается возможность ремонта манипулятора, в том числе без непосредственного участия человека, без разгерметизации радиационно-защитной камеры.
Данное изобретение предполагает использование любого из известных типов приводов для создания момента на входных валах шарнира.
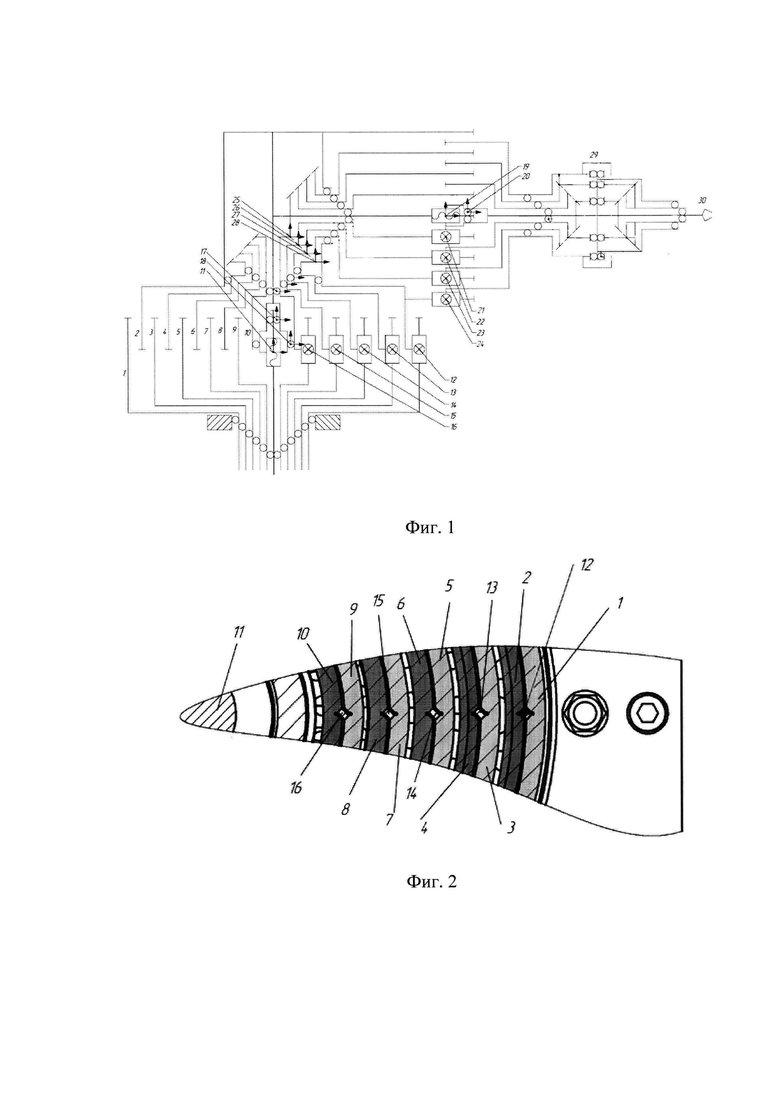
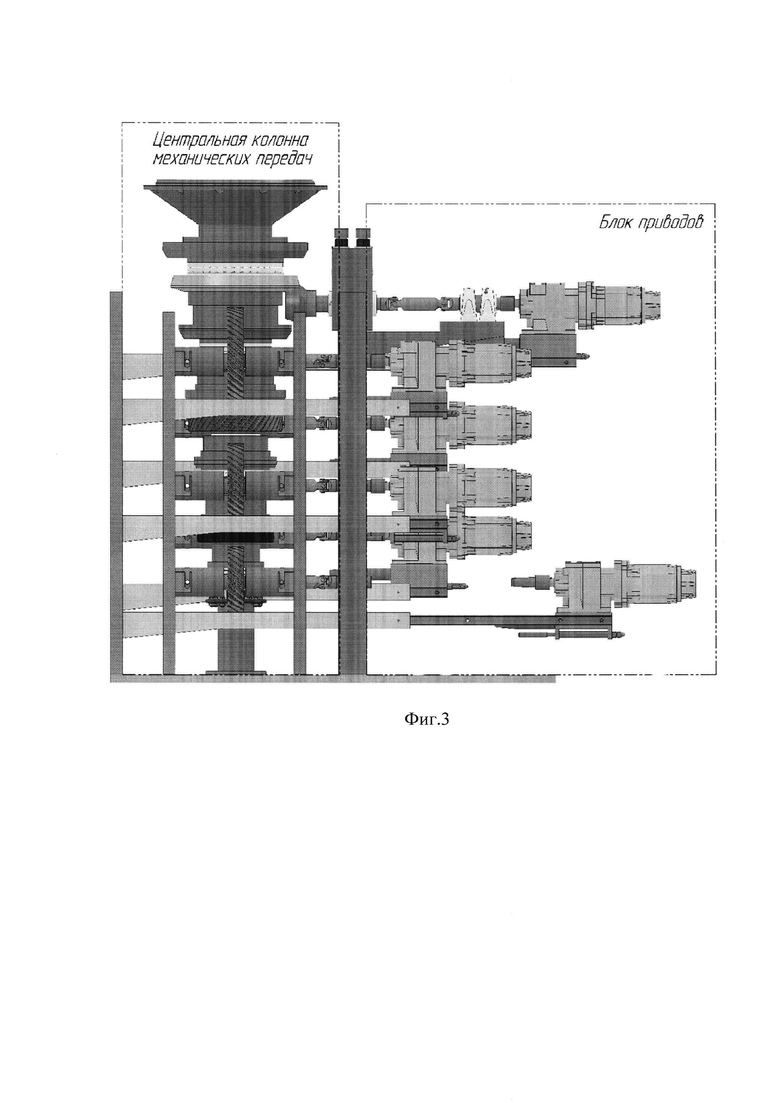
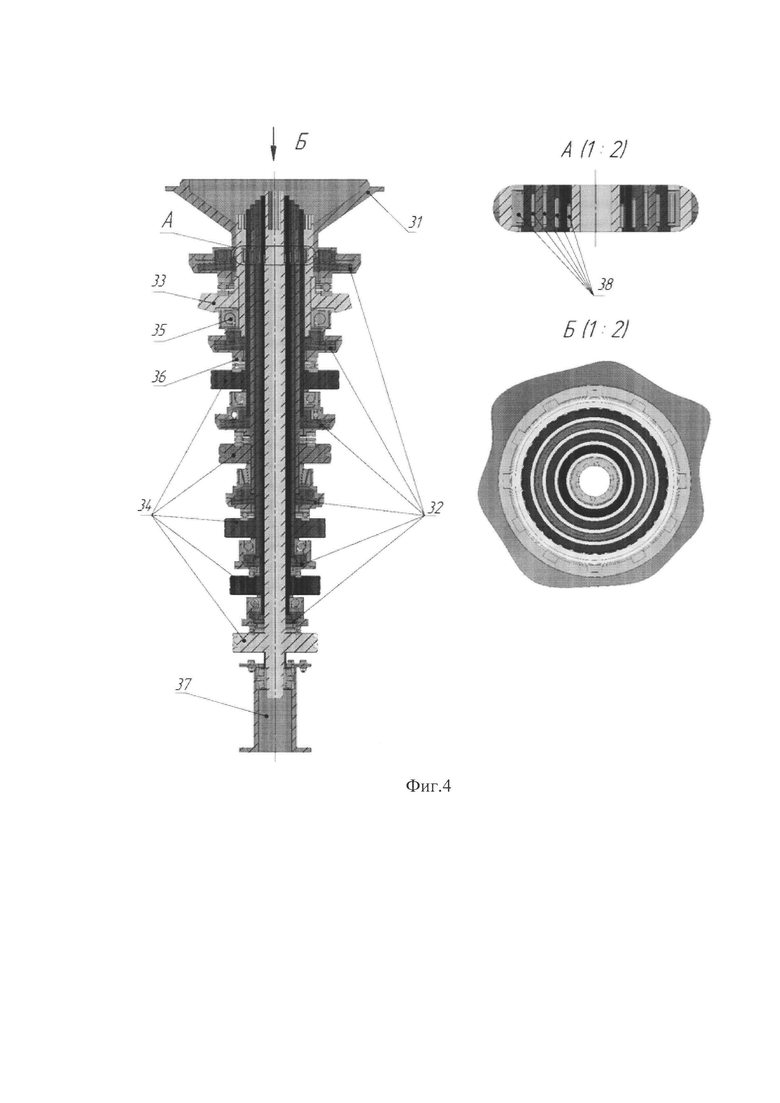
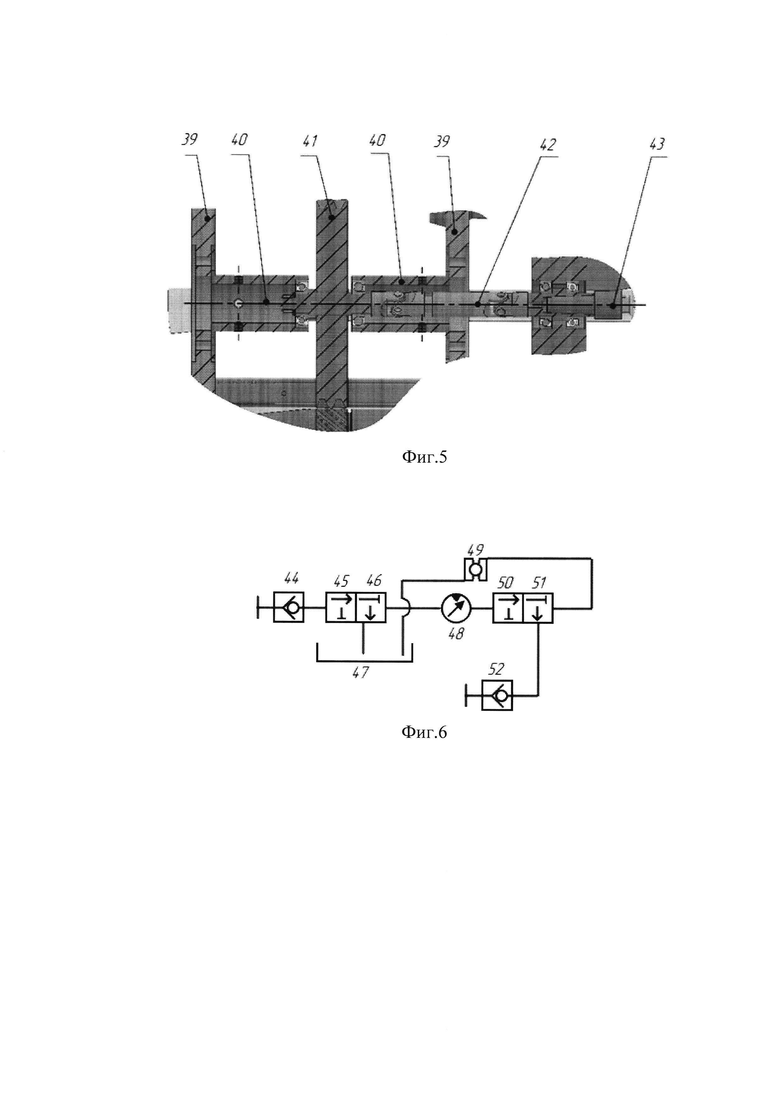
Суть предлагаемого изобретения в одном из возможных (но не единственном) вариантов реализации поясняется на фиг. 1, где представлена кинематическая схема шарнира, фиг. 2, детализирующей способ передачи момента в телескопических валах, фиг. 3, на которой представлен общий вид коробки отбора мощности, фиг. 4, на которой представлено устройство раздаточных валов, фиг. 5, на которой представлено устройство узла замены двигателя, и фиг. 6, представляющей собой гидравлическую схему уплотнения.
Общий принцип работы манипулятора ясен из кинематической схемы, изображенной на фиг. 1. Вертикальное звено включает в себя концентрические валы по числу степеней свободы манипулятора плюс захват, за вычетом единицы. В изображенном на фиг. 1 варианте манипулятор обладает пятью степенями свободы: вращение вокруг вертикали, перемещение вдоль вертикальной оси, перемещение по радиусу, отклонение звена от вертикали, вращение конечного звена вокруг своей оси. Захват манипулятора обладает одной степенью свободы, конкретная реализация которой не рассматривается. Привод захвата представляет собой вал с квадратным хвостовиком. Все концентричные валы вертикального звена представляют собой телескопические сборки, состоящие из наружной (расположена внизу) и внутренней (расположена вверху) секций. Секции обозначены, соответственно:
- 1 и 2 - вращение всей колонны,
- 3 и 4 - отклонение конечного звена от вертикали,
- 5 и 6 - поворот конечного звена вокруг оси,
- 7 и 8 - вращение инструмента,
- 9 и 10 - движение по радиусу,
- 11 – шарико-винтовая передача вертикального звена.
Между валами в каждой паре установлены линейные подшипники со скрещенными роликами, как это показано на фиг. 2. Внутренние валы на фиг. 2 обозначены более темным цветом. На кинематической схеме на фиг. 1 роликовые сепараторы обозначены номерами с 12 по 16. Благодаря их наличию, вращение передается от наружного вала к внутреннему в каждой паре, и при этом остается возможным поступательное движение валов относительно друг друга. Вертикальное линейное перемещение реализовано за счет дифференциального механизма, входными звеньями которого являются вал шарико-винтовой передачи (ШВП) и корпус вертикального звена, имеющий жесткую связь с гайкой винтовой передачи. Для фиксации свободного конца вала ШВП от возможных колебаний применен комбинированный подшипник 17 (на рисунках не вижу), представляющий собой втулку скольжения, посаженную на шариковый радиальный подшипник, который, в свою очередь, посажен на законцовку вала ШВП.
В зазорах между комплектами телескопических валов устанавливаются втулки скольжения 18 (на рисунках не видно), выполненные из латуни или других радиационно-стойких материалов с антифрикционными свойствами. Это позволяет разгрузить внутренние валы, особенно в горизонтальном звене, оперев их на внешний вал.
Устройство горизонтального звена манипулятора идентично уже рассмотренному устройству вертикального звена, с ШВП 19, опирающейся на подшипник 20, роликовыми сепараторами 21-24. Передача вращения от валов вертикальной ступени к горизонтальной ступени осуществляется через конические передачи 25-28. В рассмотренной конструкции манипулятора горизонтальное звено выполнено без возможности вращения относительно собственной оси, поэтому вал ШВП 19 зафиксирован на корпусе звена, а гайка ШВП передает усилие для линейного перемещения. Следом за горизонтальным звеном установлено наклонное, представляющее собой уже известную дифференциальную пару конических колес. Устройство наклонного звена 29 и привода захвата 30 здесь не рассматривается, поскольку не отличается от аналогичного узла прототипа.
Для передачи механического момента от электродвигателя к манипулятору применяется коробка отбора мощности, показанная на фиг. 3. Основным элементом коробки отбора мощности является центральная колонна механических передач фиг. 4. Фланец 31 служит для центрирования коробки относительно колонны манипулятора. Аварийные торцевые уплотнения 32 вводятся в действие в том случае, если уровень жидкости в уплотняемом зазоре опускается ниже установленной черты. Передача вращения от мотор-редукторов осуществляется через коническую зубчатую пару 33 и геликоидальные шестерни 34. Благодаря такой компоновке, удается вывести все приводные валы на одну боковую плоскость, что удобно для обслуживания приводов. Подшипниковые опоры 35 воспринимают вес валов коробки отбора мощности и усилия в ее передачах. Подшипниковые опоры 36 служат для установки фиксаторов торцевых уплотнений. Вес колонны воспринимается опорой 37. Подшипники 38 служат для дистанцирования концентрических валов. На фиг. 5 показан узел установки привода. Перегородки 39 выполнены в виде сотовых панелей, что позволяет с высокой точностью расположить в них опоры 40. Зубчатое колесо 41 передает движение на центральный блок валов. Для компенсации возможной несоосности и перекоса вала привода применен универсальный шарнир 42. Вал привода 43 выполнен в виде метрического конуса, который фиксируется в ответной втулке аналогичной геометрии.
Для герметизации газовой полости в радиационно-защитной камере используется динамическое уплотнение, гидравлическая схема которого показана на фиг. 6. Заправочная горловина 44 выполнена в виде быстроразъемного соединения с предохранителем. Распределительный клапан, следующий за горловиной, имеет две позиции. Позиция 45 соответствует забору масла, позиция 46 соответствует циркуляции масла по замкнутому контуру. Картер 47 служит для сбора утечки, прежде чем насос 48 восполнит ее. Поскольку объемный расход утечки сравнительно мал, насос 48 включается эпизодически, по релейным командам управления. Зазор в опорах 49 заполняется маслом, поданным насосом. Для заполнения всех зазоров в концентрических валах сделаны отверстия, диаметр которых позволяет маслу без существенных потерь давления перетекать в полость между следующими двумя валами. Для возможности замены масла предусмотрен распределительный клапан сброса утечки с двумя позициями. Позиция 50 соответствует циркуляции масла, позиция 51 - сбросу во внешний резервуар через горловину 52.
Таким образом, заявленное изобретение расширяет возможности радиационно-стойких манипуляторов путем включения в их кинематическую схему поступательных звеньев и использования динамического уплотнения между двигателями и механической рукой.
| название | год | авторы | номер документа |
|---|---|---|---|
| Податливый дифференциальный шарнир манипулятора с силомоментным очувствлением | 2021 |
|
RU2803718C2 |
| Роботизированная хирургическая система транскатетерного протезирования клапана аорты | 2022 |
|
RU2789707C1 |
| Манипулятор | 1983 |
|
SU1151453A1 |
| Манипулятор | 1987 |
|
SU1465300A1 |
| Рука манипулятора | 1983 |
|
SU1138312A1 |
| Рука манипулятора | 1982 |
|
SU1042989A1 |
| Шарнир манипулятора | 1982 |
|
SU1057274A1 |
| Манипулятор | 1979 |
|
SU831615A1 |
| Манипулятор | 1980 |
|
SU891425A1 |
| МНОГОКРАТНЫЙ ШАРНИР ПЕРЕДАЧИ | 2020 |
|
RU2749819C1 |
Изобретение относится к манипуляторам для атомной промышленности, применяемым в условиях повышенной радиации. Манипулятор содержит двигатели и механическую руку, при этом механическая рука расположена в радиационной среде, двигатели расположены вне радиационной среды, механическая рука содержит шарнирные рычаги и компоненты конической передачи, приводимые в движение концентрическими полыми валами. Манипулятор дополнительно содержит два линейных звена, одно горизонтальное и одно вертикальное, каждое из которых представляет собой дифференциальную пару винтовой передачи и вращения. Вертикальное звено концентрично корневому звену манипулятора, а горизонтальное звено расположено следом за вертикальным по кинематической схеме. Ввод движения в радиационно-защитную камеру производится через зеркало смазывающей жидкости, утечки которой непрерывно восполняются насосом, организующим циркуляцию жидкости по замкнутому контуру. В концентричных валах манипулятора выполнены отверстия, достаточные по диаметру для равномерного заполнения всех зазоров между концентричными валами манипулятора смазочной жидкостью. Технический результат заключается в том, что рабочая зона манипулятора становится цилиндрической и лучше вписывается в габариты радиационно-защитной камеры, при этом благодаря наличию вертикального линейного звена люфты не оказывают влияния на точность хода по вертикали, а благодаря тому, что основной вес манипулятора и груза воспринимается наибольшим по диаметру валом вертикальной ступени, грузоподъемность манипулятора существенно возрастает, и достигается возможность ремонта манипулятора, в том числе без непосредственного участия человека, без разгерметизации радиационно-защитной камеры. 4 з.п. ф-лы, 6 ил.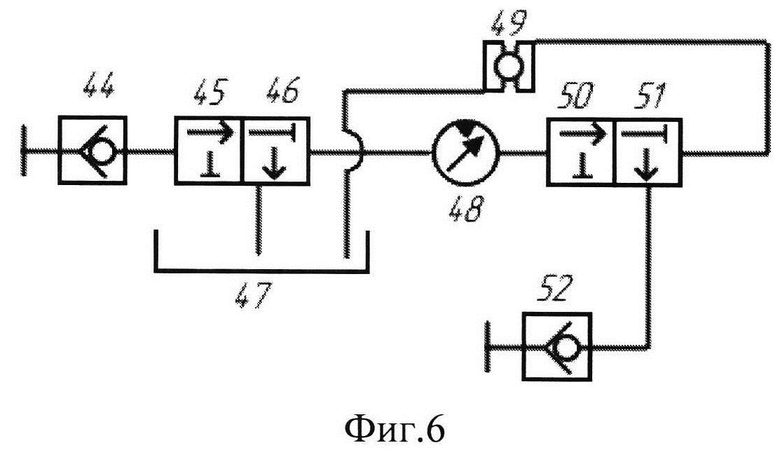
1. Манипулятор внутрикамерный, выполненный с возможностью расположения в радиационной среде, содержащий двигатели, расположенные вне радиационной среды, а также шарнирные рычаги и компоненты конической передачи, приводимые в движение концентрическими полыми валами, отличающийся тем, что дополнительно содержит два линейных звена, одно горизонтальное и одно вертикальное, каждое из которых представляет собой дифференциальную пару винтовой передачи и вращения, причем вертикальное звено концентрично корневому звену манипулятора, а горизонтальное звено расположено следом за вертикальным по кинематической схеме, все концентричные валы вертикального звена представляют собой телескопические сборки, состоящие из наружной и внутренней секций, ввод движения в радиационно-защитную камеру производится через зеркало смазывающей жидкости, утечки которой непрерывно восполняются насосом, организующим циркуляцию жидкости по замкнутому контуру, причем в концентричных валах манипулятора выполнены отверстия, достаточные по диаметру для равномерного заполнения всех зазоров между концентричными валами манипулятора смазочной жидкостью.
2. Манипулятор внутрикамерный по п. 1, отличающийся тем, что содержит конические или геликоидальные передачи для передачи мощности от двигателей к манипулятору.
3. Манипулятор внутрикамерный по п. 1, отличающийся тем, что между двигателями и манипулятором дополнительно установлены торцовые уплотнения.
4. Манипулятор внутрикамерный по п. 1, отличающийся тем, что для установки двигателей в манипуляторе предусмотрены муфты с быстроразъемными соединениями, например метрическими конусными втулками.
5. Манипулятор внутрикамерный по п. 1, отличающийся тем, что корпуса двигателей оснащены механическим интерфейсом.
| CN 111890407 A, 06.11.2020 | |||
| Шарнирное соединение звеньев манипулятора | 1978 |
|
SU699748A2 |
| Шарнир манипулятора | 1982 |
|
SU1047681A1 |
| Манипулятор | 1978 |
|
SU779063A1 |
| US 4762455 A1, 09.08.1988 | |||
| DE 4242575 A1, 24.06.1993 | |||
| JP 62068293 A, 28.03.1987. | |||

