(54) МАНИПУЛЯТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для отделения верхней заготовки от стопы и подачи ее в ориентированном положении | 1987 |
|
SU1454550A1 |
| Устройство для подачи заготовок и удаления изделий из штампа | 1989 |
|
SU1738440A1 |
| Вакуумный захватный орган | 1985 |
|
SU1294434A1 |
| Манипулятор для горизонтально-ковочных машин | 1981 |
|
SU1082540A1 |
| Автоматизированный технологический комплекс для прессования изделий из порошков | 1991 |
|
SU1801048A3 |
| Промышленный робот | 1988 |
|
SU1604496A2 |
| Устройство для поштучной выдачи заготовок | 1986 |
|
SU1324728A1 |
| Робот к листоштамповочному прессу | 1976 |
|
SU565818A1 |
| МНОГОПОЗИЦИОННОЕ ЗАХВАТНОЕ УСТРОЙСТВО МАНИПУЛЯТОРА | 1992 |
|
RU2033918C1 |
| РОБОТИЗИРОВАННЫЙ МАНИПУЛЯТОР | 2003 |
|
RU2243881C2 |
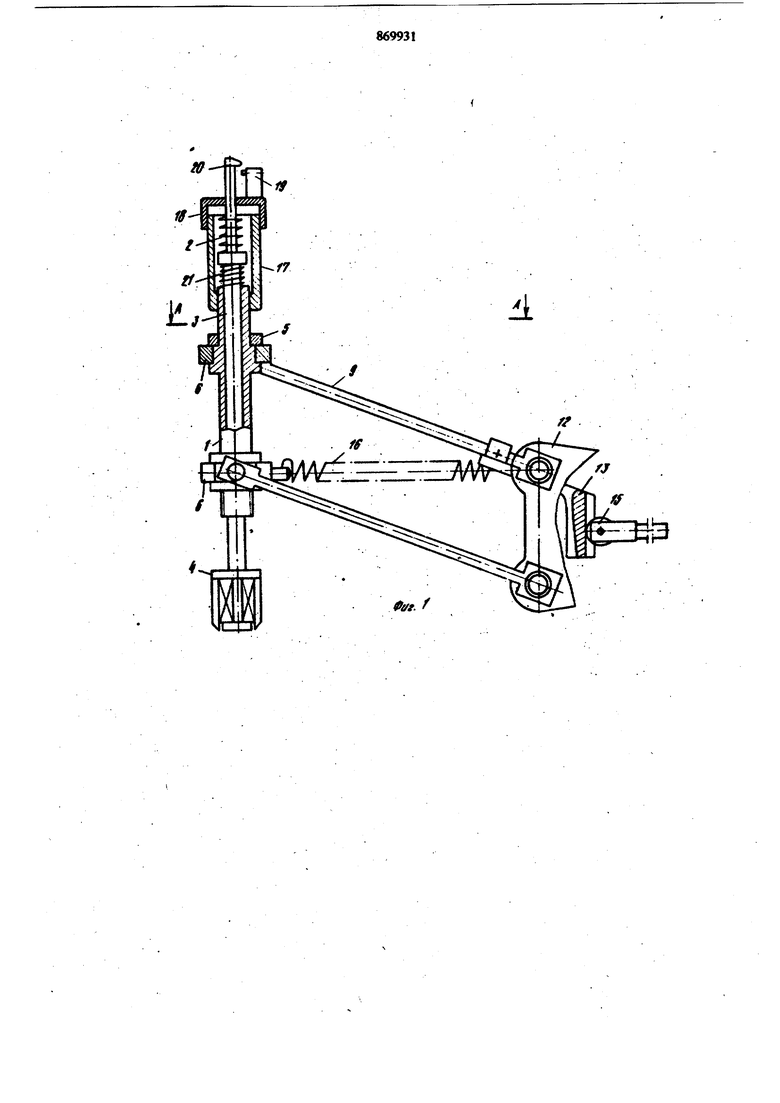
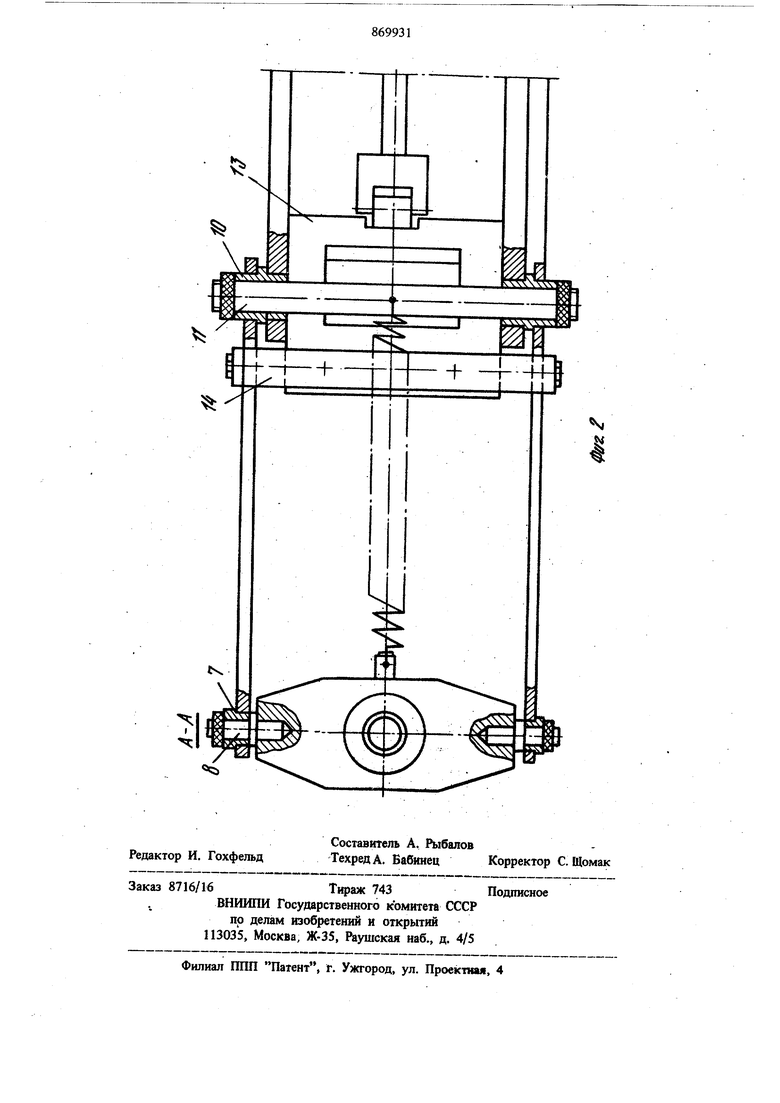
Изобретение относится к вспомогател1гному оборудованию процессов обработки металлов давлением и может быть использовано в листовой штамповке для подачи заготовок я удаления полученньрс 1изделий из зоны обработки. Известен манипулятор, содержащий основание с установленной на нем рукой, кинематически связанный с рукой захватный орган в виде корпуса с захватом и систему управления 1. Недостатком известного манипулятора являет ся ограниченное вертикальное перемещение захва та, что не позволяет применять такой манипулятор при штамповке-вытяжке сравнительно высоких станкообразных деталей. Цель изобретения - расширение типоразмеров подаваемых изделий. Для зтого в манипуляторе содержащем основание с установленной на нем рукой, кинематически связанный с рукой захватный орган в виде корпуса с захватом и систему управления, захватный орпш снабжен установленным в корпусе с возможностью вертикального перемещения щтоком с буртом, захват установлен на Штоке, а кинематическая связь захватного органа с рукой выполнена в виде приводного параллелограммного механизма, рычаги которого смонтированы на корпусе захватного органа н на руке с возможностью качания, при этом корпус захватного органа подпружинен относительно руки. Захватный орган снабжен установленной на его корпусе крышкой с микропереключателем, злектрически связанным с системой управления манипулятора, а его щток - путевым переключателем, установленным на торце бурта с возможностью взаимодействия с микропереключателем, при зтом шток подпружинен относительно крьпики и корпуса. На фиг. 1 изображен общий вид захватного органа манипулятора; на фиг. 2 - разрез А-А на фиг. I. Манипулятор содержит захватный оргаи в внде корпуса 1, ja котором с возможностью вертикального перемещения установлен подпружиненный пружиной 2 штрк 3. На щтоке 3 закреплен злектромагнитный зг.хват 4. Таких злементов может быть несколько, и они Morjrr быть установлены на промежуточной крестовине, которая крепится к щтоку. На корпусе 1 смонтированы и закреплены на нем гайками 5 планки 6, На планках 6 с возможностью поворота вокруг втулок 7, смонтированных на осях 8, установлены одними своими концами четыре тяги 9 параллелограм ного механизма, которые своими другими концами также с возможностью поворота установлены на втулках 10, смонтированных на осях 11, в свою очередь закрепленными в корпусе руки 12 робота. Тяги 9 взаимодействуют с рьгчагами .13, установленными также на осях 11с возможностью поворота, которые соединяются с тягами посредством планок 14, Поворот рычагов 13 осуществляется штоком 15 привода кисти руки робота (не показан). Корпус 1 захвата подпружинен пружиной 16 отиосительио корпуса руки робота. На корпус I захвата навернута гайка 17 с крьишсой 18, на которой установлен микропереключатель 19, взаимодействующий своим подвижным контактом с путевйм выключателем 20, закрепленным в торце штока 3. В гайке 17 смсжтнрована амор тизирующая пружина 2 и пружина 21. При захвате листовой заготовки из пачки рука робота подводится к магазину с заготовками, включается привод захвата, который своим штоком 15 поворачивает. 13. РЬпаги 13, взаимодействуя через планки 11с тягами 9, поворачивают их против часовой стрелки относительно плоскости чертежа вокруг осей И. Тяги 9 перемещают корпус 1 захвата со 3 до соприкосновения с верхней листовой заготовкой электромагнитного захвата 4, закреплошого на щтоке 3. Так как шток 3 установлю в корпусе 1 с возможностью продольного перемещении, после остановки штока 3 при соприкосновеиии электромагнитного захвата 4 с заготовкой корпус 1 некоторое время под воздействием тяг 9 продолжает перемещаться относительно штока 3,, при зтом пружина 2 выполняет функции амортизатора. После захвата заготовки злектромагнитным захватом привод захвата по команде с пульта управления ррботом осуществляет пово рот тяг 9 параллелограмного механизма в обратном направлении. Тяги 9 Подаимают корпус 1 захвата. Корпус i захвата, воздействуя на буртик цггока 3, поднимает шток 3 с электромагнитным захьатом 4 и примагниченной к нему листовой заготовкой на определенную высоту, зависящую от длины тяг 9 и угла их поворота. В случае захвата магнигным захватом 4 нескольких заготовок пружинз 21, устаиовленная между торцом корпуса захвата 1,и буртиком штока 3, сжимается под действием дополнительирго веса от лишних заготовок. При этом флажок путевого выключателя 20 в результате дополнительного перемелдения вниз игтока 3 взаимодействует с подвижным контактом микропереключателя, связанного с системой управления роботом. При замьпсании контакта робот останавливается. Этим обеспечивается ясключение возможности подачи в штамп роботом одновременно нескольких заготовок. Настройка пружины 21 на определенный вес обеспечивается соответствующим, поджатием крышкой 18 пружин 2 и 21. При подъеме корпуса 1 со штоком 3, злектромагиитным захватом 4 и заготовкой пружина 16 выполняет роль злемента, компен- . сирующего вес захвата. Дальнейшая вертикальная транспортировка заготовки осуществляется подъемом руки самого робота. Возможность дополнительного вертикального перемещения захвата относительно робота позволяет увеличить высоту стопы заготовок на величину, соответствующую этому перемещению. При штамповке стаканообразных изделий захват . . отштампованных изделий осуществляется за дно стакана изнутри. Работа захвата при этом аналогична его работе при захвате листовой заготовки из пачки листовых заготовок. ВозможносП) дополнительного вертикального перемещения захвата относительно руки робота в этом случае позволяет осуществлять захват более высоких крупногабаритных изделий. Манипулятор описанной конструкции обладает возможностью подачи изделий разных типоразмеров. Формула изобретеиНя 1.Манипулятор, содержащий основание с установленной на нем рукой, кинематически связанный с рукой захватный орган в виде корпуса с захватом н систему управления, отличающийся тем, что, с целью расширеиня типоразмеров подаваемых изделий, захватнь й ортан снабжен установленным в корпусе с возможностью вертикального переме1цения штоком с , захват установлен на штоке, а кинематическая связь захватного органа с рукой выполнена в виде приводИото параллелограмного механизма, рычаги кторого смонтировш на корпусе захватного (фгаиа и на руке с возможностъю качания, при этом корпус захвапинго ортаяя под|фужинеЬ отно сительно руки. 2.Манипулятор яо п. 1, о т л н ч а ю щ н и с я тем, что захватный орган снабжу установлешюй на его корпусе крьпшсой с микропереключателем, электрически связанным с системой у|фавле1шя манипулятора,- а его шток - путюым переключателем, устаиовлеяным на торце бурта с возможностью взаимодействия с мш1:рО11ерекшочателем, пр9 этой шток подпружинен относительно краашкя и корпуса. Источюаси информации, принятые во внимание при экспертизе 1. Авторское свидете1пство СССР N 319466, KjL В 25 J 3/00, 1970 (прототип).
