Изобретение относится к спутниковой навигации, в частности применимо в системах обеспечения летных испытаний пилотажно-навигационного оборудования авиационных объектов, и может быть использовано для определения углового положения летательного аппарата (ЛА) при летных испытаниях ЛА, а также для определения точностных характеристик систем его пилотажно-навигационного оборудования.
Известен способ определения угловой ориентации, патент РФ №2248004, основанный на приеме сигналов от космических аппаратов глобальных навигационных спутниковых систем на разнесенные приемники сигнала, расположенные на объекте так, чтобы они не лежали на одной прямой. Приемниками сигнала являются GPS-приемники, количеством не менее трех. По их показаниям определяют координаты каждого приемника сигнала, на основании которых вычисляют положение векторов, задающих связанную с объектом систему координат.
Недостатком данного способа является необходимость определения координат фазового центра каждой из антенн GPS-приемников для последующего вычисления координат вектора относительного расположения антенн. Нахождение координат каждой антенны производится с ошибкой, при определении вектора относительного расположения ошибки суммируются.
Известен способ ориентации объектов по радионавигационным сигналам космических аппаратов, патент РФ №2122217, 1998.11.20, взятый за прототип. Способ основан на приеме сигналов от n космических аппаратов двумя или более антенно-приемными устройствами, расположенными параллельно одной или двум осям объекта, выделении сигнала с доплеровской частотой, определении набега фаз за интервал времени измерения и определении углового положения объекта.
В течение определенного интервала времени производят N измерений фазовых сдвигов между парами антенно-приемных устройств, а угловое положение объекта определяют путем решения системы уравнений, составленных по разностям измерений фазовых сдвигов сигналов N космических аппаратов, принятыми антеннами подвижного объекта. Учитываются сигналы текущих значений направляющих косинусов векторов направлений от объекта до каждого космического аппарата в текущий момент времени и их приращения по отношению к начальным значениям.
Недостатком способа является наличие двух систем, определяющих параметры - расстояние между аппаратами (база) и координаты - фазу. Падение точности является фактором увеличения определения неизвестных параметров измерения и, как следствие, увеличение сложности вычислений.
Технический результат, на достижение которого направлено данное изобретение, состоит в повышении точности определения углового положения самолета по данным приемников спутниковой навигационной системы.
Существенные признаки.
Для получения указанного технического результата в способе определения углового положения самолета по данным приемников спутниковой навигационной системы, включающем прием сигналов от N космических аппаратов глобальных навигационных спутниковых систем на разнесенные антенны приемных устройств, расположенные на продольной оси и крыле ЛА, проведение за интервал времени m измерений фазовых сдвигов между парами антенно-приемных устройств и определение углового положения ЛА, дополнительно измеряют фазовый сдвиг по разности псевдодальностей текущих сигналов от пары спутников навигационной системы, принятыми в каждой из антенн приемников спутниковой навигационной системы (СНС), затем сравнивают разности, вычисленные для одной и той же пары спутников в один и тот же момент времени из двух рассматриваемых приемников СНС, антенны которых размещены в хвостовой (1) и в носовой (2) частях, на крыле (3), и по результатам сравнения определяют двойные разности псевдодальностей между парами антенн приемных устройств.
Под двойной разностью  подразумевается разность одинарных разностей, вычисленных двумя приемниками СНС для одной и той же пары спутников в один и тот же момент времени.
подразумевается разность одинарных разностей, вычисленных двумя приемниками СНС для одной и той же пары спутников в один и тот же момент времени.
 .
.
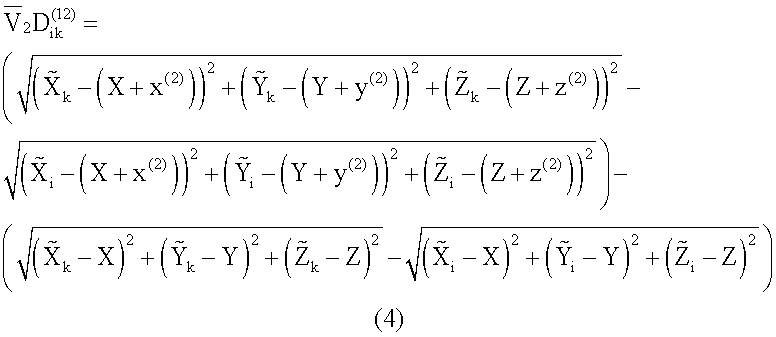
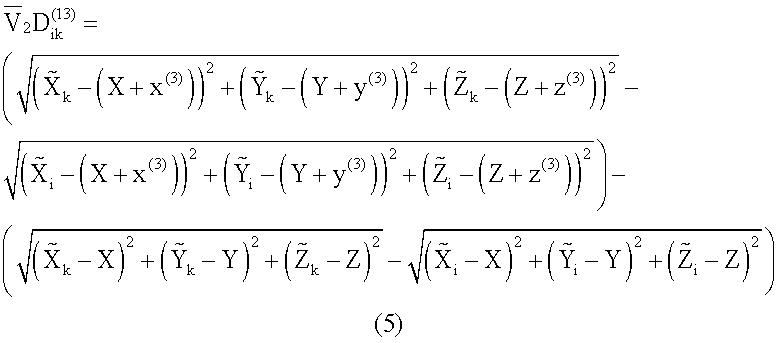
В выражении для двойной разности  псевдодальностей присутствуют измерения i-то и k-го спутников, полученные каждым из двух рассматриваемых приемников СНС. Аналогичные двойные разности составляются и для пары приемников СНС (1) и (3). (Приемники СНС с индексами (1) и (2) размещены на фюзеляже самолета: с индексом (1) - антенна на продольной оси ЛА в хвостовой части, с индексом (2) - на продольной оси ЛА в носовой части; антенна приемника СНС, отмеченного индексом (3), расположена на крыле).
псевдодальностей присутствуют измерения i-то и k-го спутников, полученные каждым из двух рассматриваемых приемников СНС. Аналогичные двойные разности составляются и для пары приемников СНС (1) и (3). (Приемники СНС с индексами (1) и (2) размещены на фюзеляже самолета: с индексом (1) - антенна на продольной оси ЛА в хвостовой части, с индексом (2) - на продольной оси ЛА в носовой части; антенна приемника СНС, отмеченного индексом (3), расположена на крыле).
Таким образом, технический результат достигается за счет составления вторых разностей измерений двух приемников СНС, при этом большая часть составляющих погрешности, содержащихся в псевдодальностях, сокращается.
По кодовым псевдодальностям приемника СНС с антенной (1) решается навигационная задача в послеполетной обработке и определяются координаты (X, Y, Z) антенны приемника (1) в прямоугольной системе координат, которые пересчитываются в геодезические координаты (В, L, Н) в координатной системе WGS-84 (В - широта, L - долгота, H - высота над эллипсоидом WGS-84).
При нахождении углов ориентации сначала определяются координаты (x(2), y(2), z(2))T и (x(3), y(3), z(3))T векторов расположения соответственно антенны (2) относительно (1) и антенны (3) относительно (1) (Т - знак транспонирования вектора). При определении координат относительных векторов расположения антенн приемников СНС используется, что длины l(2) и l(3) искомых векторов и угол α между ними известны априорно:



Если на определенную эпоху известны фазовые псевдодальности до N навигационных спутников, то с использованием двойных разностей псевдодальностей составляются N-1 соотношение вида:
Здесь  и
и  - координаты k-го и i-го спутников соответственно в момент излучения ими сигнала; (X, Y, Z) - координаты антенны (1) приемника СНС.
- координаты k-го и i-го спутников соответственно в момент излучения ими сигнала; (X, Y, Z) - координаты антенны (1) приемника СНС.
Соотношения (1)-(5) образуют систему для нахождения неизвестных координат относительных векторов. В левые части соотношения вида (4), (5) входят неизвестные целые количества циклов, для определения которых производится разрешение неоднозначности фазовых измерений СНС.
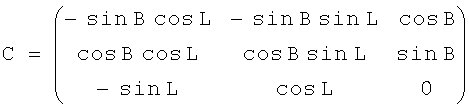
Угловое положение самолета вычисляется после решения системы уравнений по вычисленным координатам относительных векторов. Сначала координаты относительных векторов пересчитываются в систему координат с началом в фазовом центре антенны приемника СНС (1), ось X* направлена к северному полюсу Земли, ось Y* направлена вверх по нормали к земному эллипсоиду, а ось Z* - на восток. Преобразование координат осуществляется по формулам
по координатам вектора  вычисляются углы истинного курса ψ и тангажа ϑ самолета
вычисляются углы истинного курса ψ и тангажа ϑ самолета

 ,
,
для вычисления угла крена γ находят проекцию  вектора
вектора  на плоскость, ортогональную вектору
на плоскость, ортогональную вектору  далее угол крена γ находят по формуле
далее угол крена γ находят по формуле
 .
.
Перечень фигур на чертежах.
Для пояснения сущности изобретения на фиг.1 приведена функциональная схема, используемая в способе, где изображены:
1 - антенна в хвостовой части ЛА;
2 - антенна в носовой части ЛА;
3 - антенна в крыльевой части ЛА;
4 - искусственные спутники Земли (ИСЗ) спутниковой навигационной систем (СНС): GPS и ГЛОНАСС;
5 - летательный аппарат (ЛА);
6 - приемники СНС (хвостовой);
7 - приемники СНС (носовой);
8 - приемники СНС (крыльевой);
9 - комплекс бортовых траекторных измерений (КБТИ);
10 - наземный вычислитель.
Способ определения углового положения ЛА по данным приемников СНС работает следующим образом.
На самолете 2 устанавливают бортовой блок комплекса бортовых траекторных измерений КБТИ 9, размещают три антенны 1, 2, 3 приемников СНС 6, 7, 8, с помощью которых производят фазовые измерения на двух частотах L1 и L2 навигационных спутников группировок GPS 4 и ГЛОНАСС 4. Две антенны размещают вдоль продольной строительной оси самолета на фюзеляже: первую антенну 1 в хвостовой части, вторую антенну 2 - в носовой части, третью антенну 3 крепят на крыле (фиг.1). Для повышения точности измерений угловой ориентации самолета разнесение антенн производят на максимальное расстояние. После размещения антенн на самолете выполняют работы по определению точных относительных расстояний между антеннами, определяют вектора размещения антенн относительно строительных осей самолета, а именно, векторов расположения антенны (2) относительно (1) и антенны (3) относительно (1). При определении координат относительных векторов расположения антенн приемников СНС используют длины l(2) и l(3) искомых векторов и угол α между ними, известных априорно. Производят фазовые измерения на двух частотах L1 и L2 навигационных спутников группировок GPS 4 и ГЛОНАСС 4 во время полета. Информация 3-х приемников СНС, выдаваемая в формате RS-232, регистрируется в КБТИ с частотой 1 Гц (см. патент РФ №2116666 от 18.10.95 г.).
Затем остальные вычисления производят на наземном вычислителе 10. В каждом из приемников СНС определяют фазовый сдвиг по разности фазовых псевдодальностей, принятых текущих сигналов от пары спутников навигационной системы, затем сравнивают разности фазовых псевдодальностей, вычисленных для одной и той же пары спутников в один и тот же момент времени из двух рассматриваемых приемников СНС, антенны которых размещены в хвостовой 1 и в носовой 2 частях, в хвостовой части 1 фюзеляжа и на крыле 3, и по результатам сравнения определяют двойные разности псевдодальностей между парами антенно-приемных устройств (1)-(2), (1)-(3).
Во время полета информация 3-х приемников СНС, выдаваемая в формате RS-232, регистрируется в бортовом блоке КБТИ 9 с частотой 1 Гц. Обработка сигналов приемников СНС и определение углов ориентации самолета производят в послеполетной обработке на наземном вычислителе 10 по соотношениям (1)-(8).
Здесь и - координаты k-го и i-го спутников соответственно в момент излучения ими сигнала; (X, Y, Z) - координаты антенны (1) приемника СНС.
Соотношения (1)-(5) образуют систему для нахождения неизвестных координат относительных векторов. В левые части соотношения вида (4), (5) входят неизвестные целые количества циклов, для определения которых производится разрешение неоднозначности фазовых измерений СНС.
Угловое положение самолета вычисляется после решения системы уравнений по вычисленным координатам относительных векторов. Сначала координаты относительных векторов пересчитываются в систему координат с началом в фазовом центре антенны 1 приемника СНС 6, ось Х* направлена к северному полюсу Земли, ось Y* направлена вверх по нормали к земному эллипсоиду, а ось Z* - на восток. Преобразование координат осуществляется по формулам
По координатам вектора вычисляются углы истинного курса ψ и тангажа ϑ самолета

для вычисления угла крена γ находят проекцию вектора на плоскость, ортогональную вектору , далее угол крена γ находят по формуле

«Сырые» кодовые и фазовые измерения приемника СНС содержат в себе погрешности, зависящие от целого ряда причин. Погрешности в измерении псевдодальностей до навигационных спутников вызывают ошибки в нахождении навигационных параметров антенны приемника СНС. Наиболее существенными из них являются:
- ошибка часов спутника;
- ошибка часов приемника СНС;
- ошибки в эфемеридах спутника;
- искажение сигнала при прохождении слоев ионосферы;
- искажение сигнала при прохождении слоев тропосферы;
- многолучевость;
- случайный шум приемника СНС;
- неоднозначность фазовых измерений.
Погрешности первых пяти из перечисленных причин уничтожаются (обнуляются) при составлении вторых разностей измерений двух приемников СНС.
Наземная обработка с помощью вычислителя - 10 предполагает операции вывода данных из КБТИ - 9 (регистратора) и вычислений для получения данных об угловой ориентации ЛА и точностных характеристик систем его пилотажно-навигационного оборудования при летных испытаниях ЛА.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВЫСОКОТОЧНЫХ ИЗМЕРЕНИЙ ТРАЕКТОРНЫХ КООРДИНАТ ЛЕТАТЕЛЬНОГО АППАРАТА В ЛЕТНЫХ ИССЛЕДОВАНИЯХ НА ТРАССАХ БОЛЬШОЙ ПРОТЯЖЕННОСТИ | 2008 |
|
RU2393430C1 |
| МОБИЛЬНАЯ БАЗОВАЯ КОНТРОЛЬНАЯ СТАНЦИЯ ДЛЯ ПОЛУЧЕНИЯ ПАРАМЕТРОВ ТРАЕКТОРНОГО ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА И ОЦЕНКИ РАБОТОСПОСОБНОСТИ СИСТЕМ ПИЛОТАЖНО-НАВИГАЦИОННОГО КОМПЛЕКСА ПРИ ЛЕТНЫХ ИСПЫТАНИЯХ | 2007 |
|
RU2330320C1 |
| СИСТЕМА ОЦЕНКИ ТОЧНОСТНЫХ ХАРАКТЕРИСТИК БОРТОВОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2006 |
|
RU2314553C1 |
| КОМПЛЕКС БОРТОВЫХ ТРАЕКТОРНЫХ ИЗМЕРЕНИЙ | 1995 |
|
RU2116666C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ КОМПЛЕКС БОРТОВЫХ ТРАЕКТОРНЫХ ИЗМЕРЕНИЙ | 2013 |
|
RU2543943C1 |
| ИНТЕГРИРОВАННАЯ СИСТЕМА ОРИЕНТАЦИИ И НАВИГАЦИИ ДЛЯ ОБЪЕКТОВ С БЫСТРЫМ ВРАЩЕНИЕМ ВОКРУГ ПРОДОЛЬНОЙ ОСИ | 2014 |
|
RU2561003C1 |
| ИНТЕГРИРОВАННАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ СИСТЕМА ОРИЕНТАЦИИ И НАВИГАЦИИ | 2011 |
|
RU2462690C1 |
| СИСТЕМА ЗАПРАВКИ САМОЛЕТА ТОПЛИВОМ В ПОЛЕТЕ | 1996 |
|
RU2104229C1 |
| СИСТЕМА ВЫСОКОТОЧНОЙ АВТОМАТИЧЕСКОЙ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2004 |
|
RU2287838C2 |
| КОМПЛЕКСНЫЙ СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2014 |
|
RU2558699C1 |
Изобретение относится к спутниковой навигации и может быть использовано для определения углового положения летательного аппарата (ДА) при летных испытаниях ЛА. Достигаемый технический результат - повышение точности определения углового положения самолета по данным приемников спутниковой навигационной системы (СНС). Сущность способа заключается в приеме сигналов от N космических аппаратов глобальных СНС на разнесенные антенны приемных устройств, расположенных на продольной оси и крыле самолета, определении разности фазовых псевдодальностей текущих сигналов от каждой пары спутников в приемниках СНС, в сравнении разности фазовых псевдодальностей, вычисленных для одной и той же пары спутников в один и тот же момент времени из двух рассматриваемых приемников СНС, антенны которых размещены в хвостовой 1 и в носовой 2 частях, хвостовой части 1 и на крыле 3, и в определении по результатам сравнения двойных разностей псевдодальностей между парами антенн приемных устройств, а именно (1-2), (1-3). По кодовым псевдодальностям приемника СНС антенны (1), установленной на хвосте, решают навигационную задачу и определяют координаты (X, Y, Z) антенны (1) приемника СНС в прямоугольной системе координат, которые пересчитывают в геодезические координаты в координатной системе WGS-84, при нахождении углов ориентации сначала определяют координаты векторов расположения соответственно антенны (2) относительно (1) и антенны (3) относительно (1), при условии, что длины l(2) и l(3) искомых векторов и угол между ними известны априорно, путем соответствующих вычислений определяют координаты относительных векторов расположения антенн приемников СНС, если на определенную эпоху известны фазовые псевдодальности до N навигационных спутников, то с использованием двойных разностей псевдодальностей составляют N-1 соотношений, образующих систему уравнений для нахождения неизвестных координат относительных векторов, производят разрешение неоднозначности фазовых измерений СНС, после решения системы уравнений по вычисленным координатам относительных векторов вычисляют угловое положение самолета, определение углов ориентации самолета производят в послеполетной обработке. 1 ил.
Способ определения углового положения самолета по данным приемников спутниковой навигационной системы, основанный на приеме сигналов от N космических аппаратов глобальных навигационных спутниковых систем (СНС) на разнесенные антенны приемных устройств, расположенные на продольной оси и крыле, проведении за интервал времени m измерений фазовых сдвигов между парами антенно-приемных устройств и определении углового положения самолета, отличающийся тем, что дополнительно измеряют фазовый сдвиг по разности фазовых псевдодальностей текущих сигналов, принятых каждой из антенн приемников СНС от пары спутников навигационной системы, затем сравнивают разности, вычисленные для одной и той же пары спутников в один и тот же момент времени из двух рассматриваемых приемников СНС; первую пару составляют приемники СНС с первой антенной (1) на продольной оси самолета в хвостовой части и второй антенной (2) на продольной оси самолета в носовой части, вторую пару образуют приемники СНС с первой антенной (1) на продольной оси самолета в хвостовой части и третьей антенной (3) на крыле; и по результатам сравнения определяют двойные разности псевдодальностей между парами антенн приемных устройств - первой и второй, первой и третьей, по кодовым псевдодальностям приемника СНС с антенной (1), установленной на хвосте, решают навигационную задачу и определяют координаты (X, Y, Z) в прямоугольной системе координат первой антенны (1) в хвостовой части самолета, которые пересчитывают в геодезические координаты в координатной системе WGS-84, при нахождении углов ориентации сначала определяют координаты (х(2), y(2), z(2)) и (х(3), у(3), z(3))T векторов расположения (Т - знак транспонирования вектора) соответственно второй антенны (2) относительно первой (1) и третьей антенны (3) относительно первой (1) при условии, что длины l(2) и l(3) искомых векторов и угол α между ними известны априорно, определяют координаты относительных векторов расположения антенн приемников СНС:



если на определенную эпоху известны фазовые псевдодальности до N навигационных спутников, то с использованием двойных разностей псевдодальностей составляют N-1 соотношение вида
здесь n - индекс антенно-приемных устройств (n=2, 3);
и - координаты k-то и i-го спутников соответственно в момент излучения ими сигнала, Т - знак транспонирования; (X, Y, Z) - координаты антенны (1) приемника СНС,
соотношения (Ф1)÷(Ф4) образуют систему для нахождения неизвестных координат относительных векторов, в левые части соотношения (Ф4) входят неизвестные целые количества циклов, для определения которых производят разрешение неоднозначности фазовых измерений СНС, после решения системы уравнений по вычисленным координатам относительных векторов вычисляют угловое положение самолета, определение углов ориентации самолета производят в послеполетной обработке.
| СПОСОБ УГЛОВОЙ ОРИЕНТАЦИИ ОБЪЕКТОВ ПО РАДИОНАВИГАЦИОННЫМ СИГНАЛАМ КОСМИЧЕСКИХ АППАРАТОВ (ВАРИАНТЫ) | 1997 |
|
RU2122217C1 |
| ПРОФИЛЕГИБОЧНЫЙ СТАН ДЛЯ ИЗГОТОВЛЕНИЯ ТРУБ С ФАЛЬЦЕВЫМ ШВОМ | 2000 |
|
RU2181313C2 |
| ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ НАВИГАЦИОННАЯ СИСТЕМА С КОМБИНИРОВАННЫМ ИСПОЛЬЗОВАНИЕМ СПУТНИКОВЫХ ДАННЫХ | 2007 |
|
RU2334199C1 |
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА С ЗЕМЛЕЙ И УСТРОЙСТВО НА ЕГО ОСНОВЕ | 2004 |
|
RU2262746C1 |
| СПОСОБ ПЕРЕДАЧИ ИНФОРМАЦИИ ОБРАТНОЙ СВЯЗИ, ТЕРМИНАЛЬНОЕ УСТРОЙСТВО И СЕТЕВОЕ УСТРОЙСТВО | 2017 |
|
RU2744800C1 |
| US 5841370 A, 24.11.1998 | |||
| US 6760664 В1, 06.07.2004 | |||
| US 2008204200 A1, 28.08.2008. | |||

