Изобретение относится к авиации, а именно использованию спутниковых систем радионавигации к летным испытаниям летательных аппаратов (ЛА) и пилотажно-навигационного оборудования, в частности касается создания мобильной базовой контрольной станции (МБКС) для обеспечения формирования высокоточных траекторных измерений ЛА при проведении летных испытаний в любых географически расположенных регионах, необорудованных аэродромах, а также для отработки бортового навигационного оборудования в наземных условиях.
Известен способ определения дифференциальных поправок, патент РФ №2012012, G01S 5/14, 1994.04.30. Способ определения дифференциальных поправок к радионавигационному параметру в спутниковой радионавигационной системе основан на том, что на наземных корректирующих станциях, каждая из которых привязана к точке с известными координатами, принимают сигналы радионавигационных спутников, относительно каждого из которых измеряют псевдодальности, выделяют из принятых сигналов информацию об эфемеридах спутников, рассчитывают по текущим значениям эфемерид и координатам корректирующих станций псевдодальности, формируют поправки в виде усредненных разностей между измеренными и расчетными значениями псевдодальностей и скорость изменения поправок, излучают радиосигналы, содержащие информацию о поправках и их скоростях изменения, на местоопределяющем объекте принимают сигналы с корректирующей станции и используют полученную информацию в зоне корреляции для данной корректирующей станции.
Однако предложенный способ позволяет использовать стационарные базовые станции, что ограничивает проведение летных испытаний только конкретной регионом.
Наиболее близкой к предлагаемой МБКС является спутниковая радионавигационная система для определения местоположения объектов, патент РФ №2184381 G01S 5/14, 2002.06.27, в которой система содержит наземные измерительные пункты, принимающие радионавигационные сигналы от навигационных спутников, определяющие по ним первичные радионавигационные параметры, а именно квазидальность, псевдофазу и частоту несущей сигналов спутников, а также навигационные параметры, полученные на основе их обработки, и передающие эти навигационные параметры по соответствующему каналу связи в центр обработки, где осуществляется прием навигационных параметров, их сопоставление, определение на их основе массива базовых навигационных параметров в виде дифференциальных поправок с включенными погрешностями распространения сигналов, координат точек расположения объектов, ионосферных и тропосферных погрешностей распространения сигналов, данных текущего мониторинга и первичных радионавигационных параметров, их накопление, архивация и выдача по запросу потребителя.
Однако данная система не позволяет решать задачи аппаратурной фазовой неоднозначности, не использует фазовые измерения в полном объеме информации. Для обеспечения необходимой точности измерения требуется большое количество стационарных станций, расположенных в удаленных регионах.
Технический результат, на достижение которого направлено данное изобретение, заключается в повышении точности измерений траекторных параметров ЛА, проходящего летные испытания, для оценки работоспособности бортового пилотажно-навигационного оборудования и снижении затрат при испытании бортового пилотажно-навигационного комплекса.
Для достижения названного технического результата мобильная базовая контрольная станция (МБКС), предназначенная для определения параметров траекторного движения летательного аппарата (ЛА), оценки работоспособности систем пилотажно-навигационного комплекса при проведении летных испытаний, принимающая вместе с ЛА посредством аппаратуры потребителя радионавигационные сигналы от навигационных спутников (СНС) ГЛОНАСС, GPS, определяющая по ним первичные радионавигационные параметры, а именно фазовые измерения псевдодальности от каждого спутника, информацию об эфемеридах спутников, частоты несущей сигналов спутников, текущее значение Гринвичского времени для каждого спутника, передающих эти навигационные параметры по каналам связи в накопители данных аппаратуры потребителя СНС для формирования в послеполетной обработке данных дифференциального режима СНС, используемых для получения траекторных параметров объекта летных испытаний - ЛА, снабженного комплексом бортовых траекторных измерений (КБТИ) с аппаратурой потребителя СНС, регистрирующим параметры инерциально-навигационной системы (ИНС) из состава пилотажно-навигационного комплекса (ПНК) ЛА, согласно изобретению выполнена мобильной для перемещения в различные полигоны на базе транспортного средства, например, автомобиля, с цельнометаллическим кузовом, термоизолированным по периметру. Станция снабжена генератором электропитания, подключенным к аппаратуре потребителя СНС МБКС с накопителем, оборудована стеллажами для размещения бортовой навигационной аппаратуры, выносной геодезической антенной СНС, размещаемой над точкой с известными геодезическими координатами, снабженной устройством ориентации по сторонам света (север - юг) и измерителем высоты установки антенны. При этом вычислитель для формирования в послеполетной обработке данных дифференциального режима СНС выполнен формирующим по накопленной информации в КБТИ ЛА и в накопителе МБКС траекторные параметры ЛА на основе фазовых измерений с разрешением фазовой неоднозначности и с частотой обновления бортовой ИНС с помощью использования комплексной обработки информации СНС и бортовой ИНС.
Таким образом, МБКС значительно повышает точность измерений траекторных параметров ЛА, проходящего летные испытания на различных режимах полета.
Кроме того, мобильная базовая контрольная станция для получения параметров траекторного движения летательного аппарата (ЛА) и оценки работоспособности систем пилотажно-навигационного комплекса при проведении летных испытаний выполнена с возможностью имитации движения самолета в горизонтальной плоскости. На МБКС установлен КБТИ, связанный с ним электрогенератор и антенна СНС, закрепленная на кузове МБКС, при этом третий вход КБТИ соединен с выходом испытываемой части аппаратуры ПИК ЛА, размещенной на МБКС, а выход КБТИ и выход накопителя информации аппаратуры потребителя СНС местной стационарной базовой контрольной станции (БКС) по соответствующим каналам связаны с входами вычислителя данных дифференциального режима СНС после окончания движения автомобиля МБКС, а выход связан с системой документирования.
Таким образом, осуществляют оценку работоспособности и точностных характеристик проверяемой части аппаратуры ПНК до проведения летных испытаний, что снижает затраты при испытании бортового пилотажно-навигационного комплекса.
Предлагаемая МБКС иллюстрируется чертежами, представленными на фиг.1-4.
На фиг.1 показан общий вид МБКС с блок-схемой оборудования, установленного на МБКС для оценки после полета параметров ПНК ЛА.
На фиг.2 - блок-схема вычисления дифференциального режима СНС после полета.
На фиг.3 - общий вид МБКС, имитирующей движения ЛА в горизонтальной плоскости, с блок-схемой оборудования, установленного на МБКС во время движения автомобиля.
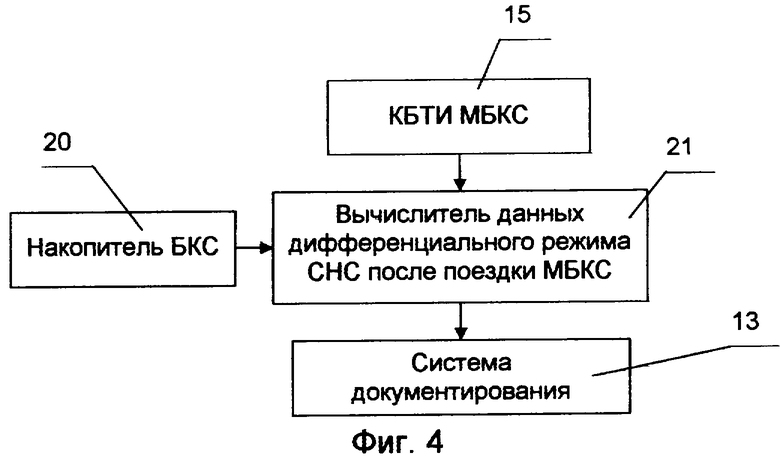
На фиг.4 - блок-схема вычисления данных дифференциального режима СНС после окончания движения МБКС для оценки работы испытываемой навигационной системы.
Для пояснения сущности изобретения на фиг.1-4 приведены схемы, где изображены:
1 - транспортное средство - автомобиль;
2 - летательный аппарат (ЛА);
3 - космические навигационные спутники;
4 - аппаратура потребителя СНС МБКС;
5 - накопитель МБКС;
6 - электрогенератор МБКС;
7 - выносная геодезическая антенна СНС;
8 - устройство ориентации по сторонам света (север-юг) и измерителя высоты установки антенны;
9 - антенна аппаратуры потребителя СНС КБТИ, размещенная на ЛА;
10 - испытываемое оборудование пилотажно-навигационного комплекса ЛА;
11 - комплекс бортовых траекторных измерений (КБТИ), установленный на ЛА;
12 - вычислитель данных дифференциального режима СНС после полета;
13 - система документирования;
14 - антенна потребителя СНС КБТИ, размещенная на кузове МБКС;
15 - комплекс бортовых траекторных измерений (КБТИ), установленный на МБКС;
16 - испытываемая навигационная система, установленная на МБКС;
17 - стационарная базовая контрольно-корректирующая станция (БКС);
18 - антенна аппаратуры потребителя СНС БКС;
19 - аппаратура потребителя СНС БКС;
20 - накопитель БКС;
21 - вычислитель данных дифференциального режима СНС после окончания движения МБКС.
22 - накопитель КБТИ ЛА.
МБКС 1 для оценки после полета параметров ПНК ЛА (фиг.1) выполнена для перемещения в различные полигоны мобильной на базе автомобиля с цельнометаллическим кузовом, термоизолированным по периметру. Станция снабжена генератором электропитания 6, подключенными к нему аппаратурой потребителя СНС 4 МБКС, накопителем 5. Оборудована стеллажами для размещения бортовой навигационной аппаратуры, выносной геодезической антенной 7 СНС, размещаемой над точкой с известными геодезическими координатами, снабженной устройством 8 ориентации по сторонам света и измерителем высоты установки антенны. При этом вычислитель для формирования в послеполетной обработке данных дифференциального режима СНС 12, (см. фиг.2) выполнен формирующим по накопленной информации в КБТИ ЛА 22 и в накопителе 5 МБКС траекторные параметры ЛА на основе фазовых измерений с разрешением фазовой неоднозначности и с частотой до 100 Гц с помощью использования комплексной обработки информации СНС и бортовой ИНС.
МБКС для оценки работы испытываемой навигационной системы (см. фиг.3) выполнена с возможностью имитации движения самолета в горизонтальной плоскости. На МБКС установлен КБТИ 15 со встроенной аппаратурой потребителя СНС и антенной 14, установленной на кузове автомобиля; связанный с ним электрогенератор 6, при этом третий вход КБТИ соединен с выходом испытываемой части аппаратуры ПНК 16 ЛА, размещенной на стеллаже, а выход КБТИ 15 и выход накопителя 20 информации аппаратуры потребителя СНС местной стационарной базовой контрольной станции 17 (БКС) по соответствующим каналам связаны с входами вычислителя 21 данных дифференциального режима СНС после поездки автомобиля МБКС, а выход связан с системой документирования 13 (см. фиг.4).
При этом электрогенератор 6 выполнен обеспечивающим мощность электрического тока 2 кВт; аппаратура потребителя СНС 4 - производящей фазовые измерения и связанной кабелем с выносной геодезической антенной 7, размещаемой на треножном штативе с устройством 8 ориентации по сторонам света и измерителем высоты установки антенны; накопителем информации 5 аппаратуры потребителя СНС; автоматизированные рабочие места операторов организованы на базе подвижного транспортного средства - автомобиля. Антенны аппаратуры потребителя СНС принимают сигналы космических навигационных систем СНС 3 ГЛОНАСС, GPS. Объектом испытаний является ЛА 2 и системы его пилотажно-навигационного комплекса 10 с установленным на борту ЛА КБТИ 11 со встроенной аппаратурой потребителя СНС и антенной СНС 9, принимающей сигналы от космических навигационных спутников 3. Формирование данных дифференциального режима СНС в послеполетной обработке происходит в вычислителе 12, на основе данных дифференциального режима СНС по фазовым измерениям вычисляются параметры траекторного движения ЛА, которые поступают в систему документирования 13 и используются для оценки характеристик ЛА 2 и систем его ПНК 10. При использовании МБКС в качестве мобильного стенда на стеллажах МБКС размещается часть систем 16 ПНК ЛА. Для получения траекторных параметров МБКС используется стационарная наземная базовая контрольно-корректирующая станция БКС 17, в состав которой входят аппаратура потребителя СНС 19 с антенной СНС 18, принимающей сигналы космических навигационных спутников 3, и накопителем информации 20. Данные СНС из накопителя БКС и данные КБТИ, накопленные при поездке автомобиля, поступают после поездки в вычислитель 21, в котором формируются данные дифференциального режима СНС, поступающие в систему документирования 13 и использующиеся для оценивания характеристик испытываемой навигационной системы до проведения летных испытаний.
МБКС предназначена для
- обеспечения траекторных измерений в интересах летных испытаний ЛА и его пилотажно-навигационного оборудования на основе дифференциального режима СНС по кодовым и фазовым измерениям спутников ГЛОНАСС и GPS и комплексной обработки информации СНС и бортовой инерциальной навигационной системы;
- высокоточных измерений координат стационарных объектов (мест установки антенн СНС, уголковых отражателей, микрофонов);
- для проведения предварительных мобильных испытаний систем пилотажно-навигационного оборудования ЛА до проведения летных испытаний;
- обеспечения высокоточных траекторных измерений при проведении летных испытаний ЛА на необорудованных площадках, в высокогорье, в различных географических регионах и климатических условиях;
- проведения анализа, оперативной и полной обработок материалов летных испытаний ЛА, полученных с помощью КБТИ;
- определения помеховой обстановки в местах установки антенны базовой контрольно-корректирующей станции;
- прогнозирования созвездий «видимых» спутников в зонах проведения летных испытаний ЛА.
МБКС расширяет возможности КБТИ (патент РФ №2116666, 18.10.1995 г., G06F 17/00: 165:00, заявка №95117763/09). КБТИ - инструмент для проведения летных испытаний летательных аппаратов, КБТИ предназначен для регистрации информации бортовых систем, обеспечения летных испытаний ПНК и ЛА траекторными измерениями, синхронизации информации бортовых систем и вычисленных траекторных параметров ЛА.
Работа МБКС осуществляется следующим образом.
Пример 1. Выполнение функции наземной базовой контрольной станции 17.
Выносная антенна 7 аппаратуры потребителя СНС, снабженная устройством 8 ориентации по сторонам света (север-юг) и измерителем высоты установки антенны, из состава МБКС 1 устанавливается в точку с известными геодезическими координатами. Информация аппаратуры потребителя СНС МБКС во время испытательного полета ЛА 2, на борту которого установлен КБТИ 11, собирается в накопителе МБКС. МБКС, принимающая вместе с ЛА через антенны и аппаратуру потребителя радионавигационные сигналы от навигационных спутников (СНС) 3 ГЛОНАСС, GPS, определяет по ним первичные радионавигационные параметры, а именно фазовые измерения псевдодальности от каждого спутника, информацию об эфемеридах спутников, частоты несущей сигналов спутников, текущее значение Гринвичского времени для каждого спутника и передают эти навигационные параметры по соответствующим каналам связи в накопители аппаратуры потребителя СНС для формирования в послеполетной обработке данных дифференциального режима СНС, которые используют для получения траекторных параметров объекта летных испытаний.
В послеполетной обработке формируются высокоточные значения траекторных параметров ЛА на основе дифференциального режима СНС по фазовым измерениям и комплексной обработки информации СНС и ИНС. Свойство мобильности позволяет МБКС выполнять функции БКС в районе любого полигона. Для обеспечения точности траекторных данных необходимо, чтобы удаление испытываемого ЛА от БКС составляло не более 300 км. Учитывая рассредоточение испытательных полигонов по территории РФ, необходимо иметь либо широкую сеть стационарных БКС, либо мобильную БКС, имеющую возможность перемещаться в различные регионы и оперативно разворачиваться для выполнения функций БКС.
Пример 2. Определение геодезических координат стационарных точек.
МБКС подъезжает к точке, для которой требуется определение геодезических координат. Выносная антенна аппаратуры потребителя СНС устанавливается на треноге над заданной точкой, ориентируется по сторонам света, измеряется высота установки. Данные аппаратуры потребителя СНС накапливаются в накопителе МБКС в течение длительного времени (не менее 30 минут). Одновременно должна работать стационарная БКС, антенна аппаратуры потребителя СНС которой закреплена в точке с известными геодезическими координатами, и удаление заданной точки от БКС не должно превышать 300 км. Геодезические координаты точки вычисляются с помощью специального программно-математического обеспечения (ПМО), производящего разрешение фазовой неоднозначности измерений СНС.
Пример 3. Определение высоты установки антенны приемника СНС на фюзеляже ЛА.
Измерения проводятся на стоянке самолета. Блок КБТИ 11 регистрирует в течение длительного времени (не менее 30 минут) данные аппаратуры потребителя СНС, антенна 9 которого размещена на фюзеляже ЛА. Одновременно в зоне стоянки работает стационарная БКС 17, антенна аппаратуры потребителя СНС 18 которой закреплена в точке с известными геодезическими координатами. После освобождения стоянки (например, во время полета ЛА) МБКС подъезжает к стоянке ЛА, выносной геодезической антенной 7 аппаратуре потребителя СНС 4, размещается над точкой с известными геодезическими координатами, снабженной устройством ориентации по сторонам света 8 и измерителем высоты установки антенны МБКС над той точкой, которая совпадает с ортогональной проекцией на наземную поверхность точки размещения антенны СНС на фюзеляже во время стационарной регистрации информации на КБТИ 11, антенна ориентируется по сторонам света, измеряется высота ее установки. Данные аппаратуры потребителя СНС накапливаются в накопителе 5 МБКС в течение длительного времени (не менее 30 минут). Одновременно должна работать та же стационарная БКС 17, которая использовалась при стационарной записи на бортовой блок КБТИ. Координаты стационарных точек формируются на основании данных дифференциального режима СНС по фазовым измерениям. Высота установки антенны 9 приемника СНС на фюзеляже ЛА вычисляется по разности полученных высот в двух описанных выше стационарных экспериментах, при вычислении высоты учитываются высота установки антенны 7 приемника СНС на треноге и различие в высоте фазовых центров антенны, установленной на фюзеляже ЛА, и геодезической выносной антенны из состава МБКС.
Пример 4.
Обслуживание бортового блока КБТИ 11 обеспечивается оператором. На тяжелых ЛА испытательные полеты происходят, как правило, с участием оператора КБТИ 11. Сразу после полета оператор из КБТИ 11 извлекает накопленную в полете базу данных бортового блока КБТИ ЛА для дальнейшего использования.
На маневренных ЛА блок КБТИ работает автономно. Для оперативного извлечения данных из блока КБТИ после полета используется МБКС. Оператор имеет возможность подъехать на МБКС к стоянке самолета, произвести стыковку БКУ и накопителя КБТИ 22 и в любых климатических условиях извлечь базу данных с материалами полета, находясь в салоне МБКС.
Пример 5. Использование МБКС в качестве мобильного стенда для отработки бортового навигационного оборудования.
Испытание бортового оборудования в летных испытаниях - дорогостоящий процесс. Большое число характеристик нового оборудования можно оценить при испытании его на МБКС 1. Испытываемая бортовая система устанавливается на стеллаже МБКС (см,фиг.3), Информация ее поступает в блок КБТИ и регистрируется в формируемой базе данных. Питание блока КБТИ и испытываемой системе при поездках автомобиля обеспечивает электрогенератор 6 из состава МБКС. Траекторные измерения при поездке автомобиля обеспечиваются измерениями СНС. Антенна приемника СНС 14, встроенного в блок КБТИ 15, установлена на крыше кузова автомобиля. Во время движения МБКС работает стационарная наземная БКС 17, антенна которой размещена в точке с известными геодезическими координатами. Данные дифференциального режима СНС используются для оценивания точностных характеристик испытываемой на МБКС навигационной системы.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ КОНТРОЛЬНЫХ ЗНАЧЕНИЙ ПАРАМЕТРОВ ПРОСТРАНСТВЕННО-УГЛОВОЙ ОРИЕНТАЦИИ САМОЛЁТА НА ТРАССАХ И ПРИАЭРОДРОМНЫХ ЗОНАХ ПРИ ЛЁТНЫХ ИСПЫТАНИЯХ ПИЛОТАЖНО-НАВИГАЦИОННОГО ОБОРУДОВАНИЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2584368C1 |
| СИСТЕМА ОЦЕНКИ ТОЧНОСТНЫХ ХАРАКТЕРИСТИК БОРТОВОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2006 |
|
RU2314553C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ КОМПЛЕКС БОРТОВЫХ ТРАЕКТОРНЫХ ИЗМЕРЕНИЙ | 2013 |
|
RU2543943C1 |
| СИСТЕМА КОМПЛЕКСНОЙ ОБРАБОТКИ ИНФОРМАЦИИ РАДИОНАВИГАЦИОННЫХ И АВТОНОМНЫХ СРЕДСТВ НАВИГАЦИИ ДЛЯ ОПРЕДЕЛЕНИЯ ДЕЙСТВИТЕЛЬНЫХ ЗНАЧЕНИЙ ПАРАМЕТРОВ САМОЛЕТОВОЖДЕНИЯ | 2012 |
|
RU2487419C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА ПО ДАННЫМ ПРИЕМНИКОВ СПУТНИКОВОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2008 |
|
RU2388008C1 |
| СПОСОБ ВЫСОКОТОЧНЫХ ИЗМЕРЕНИЙ ТРАЕКТОРНЫХ КООРДИНАТ ЛЕТАТЕЛЬНОГО АППАРАТА В ЛЕТНЫХ ИССЛЕДОВАНИЯХ НА ТРАССАХ БОЛЬШОЙ ПРОТЯЖЕННОСТИ | 2008 |
|
RU2393430C1 |
| КОМПЛЕКС БОРТОВЫХ ТРАЕКТОРНЫХ ИЗМЕРЕНИЙ | 1995 |
|
RU2116666C1 |
| СИСТЕМА ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ ПРИ ЛЕТНЫХ ИСПЫТАНИЯХ | 1996 |
|
RU2134911C1 |
| СИСТЕМА АВТОМАТИЧЕСКОЙ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2004 |
|
RU2284058C2 |
| ПОЛИЭРГАТИЧЕСКИЙ ТРЕНАЖЕРНЫЙ КОМПЛЕКС ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЙ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2013 |
|
RU2524508C1 |


Изобретение относится к области приборостроения и может быть использовано в спутниковых системах радионавигации при летных испытаниях летательных аппаратов (ЛА) и пилотажно-навигационного оборудования. Технический результат - повышение точности измерений траекторных параметров ЛА. Для достижения данного результата станция для перемещения в различные полигоны выполнена мобильной. Вычислитель дифференциального режима обеспечивает накопленние информации на основе фазовых измерений с разрешением фазовой неоднозначности и с частотой до 100 Гц. При этом осуществляют комплексную обработку информации о состоянии ЛА. 1 з.п. ф-лы, 4 ил.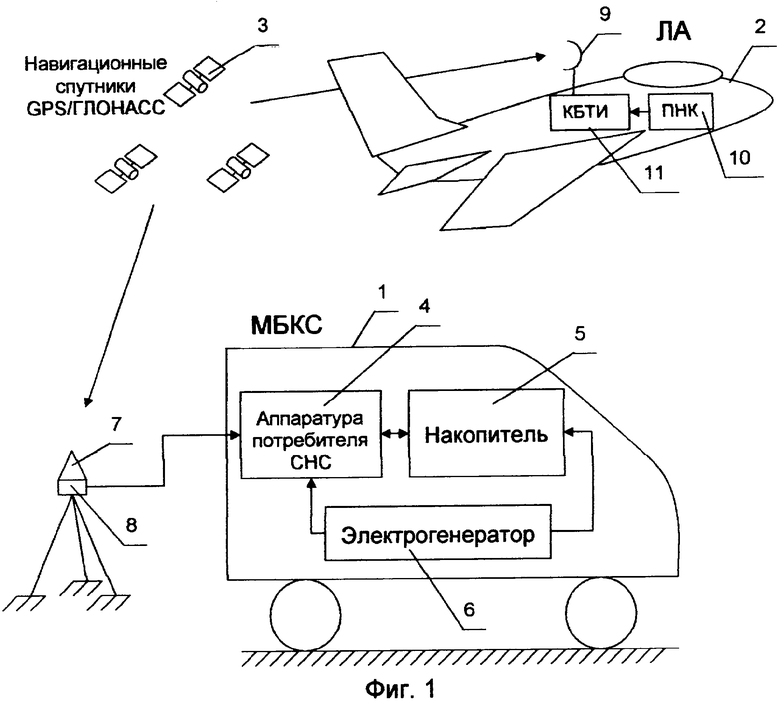
| РАДИОНАВИГАЦИОННАЯ СИСТЕМА | 2000 |
|
RU2184381C1 |
| КОМПЛЕКС БОРТОВЫХ ТРАЕКТОРНЫХ ИЗМЕРЕНИЙ | 1995 |
|
RU2116666C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДИФФЕРЕНЦИАЛЬНЫХ ПОПРАВОК | 1990 |
|
RU2012012C1 |
| Аникин A.M., Белкин A.M., Литин А.В | |||
| / Под ред | |||
| Н.Ф.Миронова | |||
| Воздушная навигация и аэронавигационное обеспечение полетов | |||
| - М.: Транспорт, 1992, с.155 | |||
| С.П.Ботуз | |||
| Позиционные системы программного управления подвижными объектами | |||
| - М.: ИПРЖ "Радиотехника", 1998, с.28. | |||

