Изобретение относится к области электротехники и может быть использовано в электроприводах переменного тока на базе асинхронного двигателя (АД) с фазным ротором, преимущественно для крановых механизмов подъема и передвижения.
Известны энергетические процессы и их описание в АД с фазным ротором при: частоте вращения ротора ω, синхронной частоте вращения (скорости) ω0, скольжении s=1-ω/ω0, электромагнитном моменте М, полезной мощности на валу Рвал=М·ω механическими потерями момента пренебрегаем или относим их к полезным), потерях мощности на нагрев внутри АД ΔР, потребляемой из сети мощности Рсети=М·ω+ΔР, отдаваемой в цепь ротора мощности скольжения Рскол, действующем значении ЭДС ротора Ерот и ее значении при синхронной частоте Е0 (1. Браславский И.Я. Асинхронный полупроводниковый электропривод с параметрическим управлением. - М.: Энергоатомиздат, 1988. - 224 с. На с.10, 11, рис.1.4, 1.5). Для упрощения в фундаментальном балансе мощностей Рсети=Рвал+Рскол+ΔР можно на время пренебречь потерями энергии внутри АД ДР=0, получить равенства, потом вспомнить о пренебрежении и превратить их в полезные фундаментальные неравенства



При замене знака "меньше" на "равно" неравенства становятся тождествами идеальной механической (не электрической) муфты скольжения, в которой отсутствуют какие-либо потери, кроме перехода в тепло энергии скольжения (2). Соответственно для этой муфты КПД определяется только соотношением скоростей КПДскол=ω/ω0.
Схемы и способы управления АД и процессами в нем с помощью коммутаторов делятся на способы с рассеиванием энергии скольжения (2) в тепло без сброса ее в сеть электропитания (1. стр.10-12, рис.1.4, рис.1.5, рис.1.6) и на способы со сбросом в сеть электропитания в асинхронно-вентильных каскадах АВК (2. Шенфилд Р., Хабигер Э. Автоматизированные электроприводы. - Л.: Энергоатомиздат, 1985. - 464 с. На с.135, рис.3.46, с.138, рис.1.52 б). Во всех случаях индивидуально определяют моменты включений коммутаторов и включают их как это нужно для получения заданной механической характеристики.
В одних случаях моменты выключений коммутаторов определяются сами при естественном уменьшении токов через них до нулей при применении диодов и тиристоров. Это называют естественной коммутацией коммутаторов (вентилей). При ней не наблюдаются перенапряжения из-за выключений токов через естественно присутствующие или искусственно введенные в роторную цепь индуктивности. Такие способы управления в роторной цепи АД названы "фазовыми" в (1, с.53) при включениях в каждый полупериод ЭДС ротора. Однако возможны и пропуски полупериодов, тогда получается импульсная модуляция на низкой частоте (ИМ-НЧ) с естественными отключениями коммутаторов (3. Гельман М.В., Лохов С.П. Тиристорные регуляторы переменного напряжения. - М.: Энергия, 1975. - 104 с. На с.9-10 - классификация способов регулирования переменного напряжения, термин "фазовое"; С.30 - схемы трехфазных регуляторов).
В других случаях моменты выключений определяют до моментов их естественной коммутации и выключают коммутаторы, а для борьбы с возникающими перенапряжениями закорачивают нагрузки через вспомогательные диоды или тиристоры при разрывах цепи питания (1, с.9, 6-я и 12-я строки сверху), сбрасывают энергию перенапряжений во вспомогательные конденсаторы (2, с.138, рис.3.52, конденсатор С; 4. RU 2052883, H02J 3/18, Н02Р 7/42, опубл. 1996.01.20, фиг.1, конденсатор 10). Часто устройства борьбы с перенапряжениями не показывают, как на рисунках в (1, с.11, рис.1.5). На диаграммах принято упрощать реальные процессы в активно-индуктивных цепях сети, статора и ротора до процессов в активных цепях и коммутировать их без перенапряжений. Так в (1, с.16, рис.1.9) пренебрегают индуктивностью сети, поскольку ее учет не важен для сути показанного способа. Простейшим средством ограничения перенапряжений являются высоковольтные стабилитроны или варисторы, которые преобразуют энергию индуктивных перенапряжений в тепло. Такие способы управления в роторной цепи АД названы "импульсными" в (1, с.59) при включениях и отключениях много раз в каждый полупериод ЭДС ротора. Правильнее их назвать импульсной модуляцией на высокой частоте (ИМ-ВЧ) при искусственных отключениях коммутаторов (3, с.9). Часто применяют менее удачный термин - широтно-импульсное преобразование (ШИП).
Известны способы управления процессами широтно-импульсного преобразования (ШИП) энергии для двигателей постоянного тока (ДПТ), при которых для управления и ограничения перенапряжений нагрузку закорачивают, а энергию перенапряжений сбрасывают в сеть электропитания через диоды V3 и необозначенные верхние обратные диоды (2, с.124, рис.3.36). Это другая область применения способа ШИП при качественно другой сети электропитания.
Известны всевозможные способы импульсного и фазового управления трехфазными коммутаторами переменного напряжения вообще (3, с.9; с.30, рис.6). Однако они не учитывают специфику роторных цепей АД.
Особое место в асинхронном электроприводе с фазным ротором занимают асинхронно-вентильные каскады (АВК) и способы управления преобразованием энергии в них, в которых энергию скольжения одной частоты выпрямителями преобразуют в энергию постоянного тока, затем инверторами преобразуют в энергию переменного тока другой частоты и сбрасывают в сеть электропитания. У идеального АВК возможно КПД=100%. В АВК применяют как фазовое управление на частотах ротора и сети (2, с.135, рис.3.46; 67), так ШИП в цепи выпрямленного тока (2, с.138, рис.3.52 б).
Эффективная работа каскада возможна только на определенной частоте вращения ω при определенном напряжении ротора согласно формуле (3). Согласующий трансформатор подбирают под это напряжение, чтобы обеспечить работу инвертора с максимальными углами и с минимальным потреблением реактивной мощности, снижающей момент. Двойное преобразование энергии в АВК увеличивает потери энергии на нагрев. Каскады не применяют в глубоко регулируемых приводах крановых механизмов.
Известен способ управления процессами двойного преобразования энергии в усложненном АВК, при котором напряжение энергии скольжения также выпрямляют, широтно-импульсным преобразованием (ШИП) в индуктивно-емкостной цепи преобразуют в повышенное и регулируемое импульсное напряжение, сглаживают его до нужного оптимального уровня индуктивностью и через инвертор энергию этого напряжения возвращают в сеть электропитания (2, с.138, рис.3.52 б).
Такие действия расширяют диапазон скоростей АВК, когда происходит сброс в сеть энергии скольжения, но существенно усложняют их реализацию. Неуправляемые диоды выпрямителя не позволяют обеспечить их индивидуальные выключения.
В известном способе (4) повторены действия предыдущего способа до получения импульсного напряжения, но его энергию через фазные тиристорные коммутаторы сбрасывают не в сеть электропитания, а обратно в цепь ротора АД усложненной конструкции. Этим осуществляется компенсация реактивной мощности в цепи ротора и увеличивается момент АД.
Недостатком способа является сложность его функциональной и аппаратной реализации, применение дорогих конденсаторов, пониженный КПД из-за обратного преобразования энергии в цепь ротора. Требование применения специального АД исключает возможность его использования в крановых приводах. Неуправляемые диоды выпрямителя не позволяют обеспечить их индивидуальные выключения. По получаемым режимам работы АД этот способ содержит много лишних действий по управлению преобразованием энергии, что усложняет реализацию способа и увеличивает потери энергии.
В известных способах фазового управления АД энергию скольжения АД из цепи ротора не сбрасывают в сеть электропитания (1, с.10, рис.1.4), снижая этим КПД. Затягивание токов коммутаторов до моментов их естественного отключения ликвидирует перенапряжения, но увеличивает потребление реактивной мощности и снижает момент.
Наиболее близким по совокупности невыключаемых признаков является способ управления асинхронным двигателем с фазным ротором (5. RU 2202850, Н02Р 5/40, Н02Р 7/62, опубл. 2003.04.20), при котором подключают статорную обмотку двигателя к сети электропитания, ограничительные индуктивности и коммутаторы подключают к цепи ротора двигателя, индивидуально определяют моменты включений коммутаторов и включают в подключенном к сети электропитания своей цепью статора двигателе с естественными и искусственными индуктивностями и другими ограничителями тока в его роторной цепи с индивидуальными независимыми коммутаторами в цепи ротора, ограничителями перенапряжений на коммутаторах, индивидуально определяют моменты включений коммутаторов и включают их. Способ использует одновременно фазовое и ИМ-НЧ управление на разных участках механической характеристики и защищает конкретный закон определения моментов включений коммутаторов.
Недостатками способа являются снижение момента из-за затягивания токов коммутаторов до моментов их естественного отключения, снижение КПД из-за завышенных токов ротора и статора и из-за неоправданного перевода в тепло энергии коммутационных перенапряжений.
Техническая задача предлагаемого изобретения состоит в увеличении момента АД с одновременным снижением его токов ротора и статора, что уменьшает потери и повышает КПД.
Указанная задача решается тем, что в способе управления процессами преобразования энергии в асинхронном двигателе с фазным ротором, при котором подключают статорную обмотку двигателя к сети электропитания, ограничительные индуктивности и коммутаторы подключают к цепи ротора двигателя, индивидуально определяют моменты включений коммутаторов и включают их, согласно изобретению, до моментов естественного отключения коммутаторов индивидуально определяют моменты их выключения и принудительно отключают их, а энергию образовавшихся из-за выключений индуктивностей коммутационных перенапряжений сбрасывают через ограничители перенапряжений в сеть электропитания цепи статора асинхронного двигателя и в тепловые потери энергии внутри ограничителей.
Новым в предлагаемом способе является то, что моменты выключений коммутаторов определяют индивидуально по отношению к разным фазам, а не одновременно. Энергию возникающих при этом перенапряжений из-за обрывов индуктивных токов сбрасывают в ограничители перенапряжений, но лучше - в сеть электропитания статора двигателя.
Технический результат заключается в увеличении электромагнитного момента АД с одновременным уменьшением токов ротора и статора за счет индивидуальных выключений коммутаторов (полностью управляемые вентили, выключаемые тиристоры, транзисторы) в цепи ротора, когда эти токи индивидуально начинают создавать отрицательные составляющие общего момента или просто создают маленький момент. В результате уменьшаются токи ротора и статора, повышается КПД и увеличивается момент АД. Положительный эффект получается даже при полном преобразовании энергии коммутационных перенапряжений на коммутаторах в тепло ограничителей перенапряжений, но эффект еще увеличивается при сбросе энергии перенапряжений в сеть электропитания. Огромная величина коммутационных перенапряжений позволяет осуществлять частичный сброс энергии скольжения из роторной цепи в сеть на любых участках механической характеристики АД, чего нельзя получить в АВК, в которых также используется эффект возвращения энергии скольжения из цепи ротора в сеть электропитания.
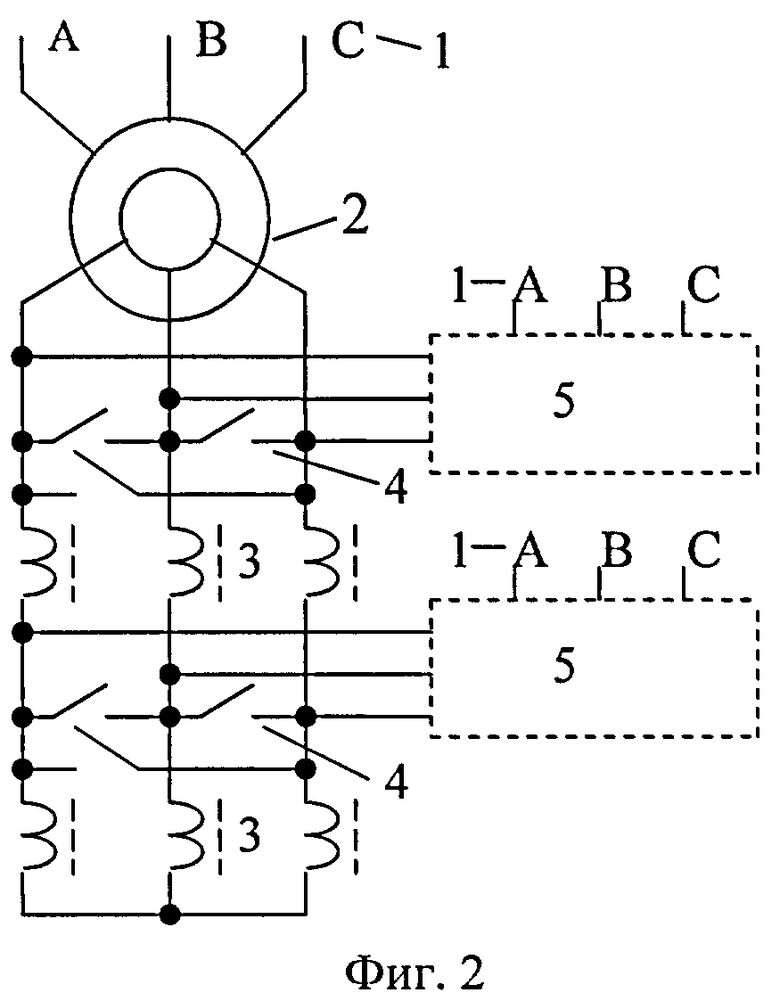
Сущность предлагаемого способа поясняется чертежами, где на фиг.1 приведена схема АД для реализации предлагаемого способа; на фиг.2 приведен усложненный вариант схемы с дополнительными устройствами для управления процессами преобразования энергии в них; на фиг.3 приведен пример диаграмм токов, напряжений и момента при управлении устройством по схеме на фиг.1 по предлагаемому способу, а на фиг.4 приведены эти же диаграммы при управлении по способу-прототипу.
Технический результат заключается в увеличении электромагнитного момента М АД с одновременным уменьшением токов ротора ia, ib, ic, токов коммутаторов в его цепи iab, ibc, ica (ia=iab-ica) и статора iA, iB, iC (см. фиг.1, 3, 4), которые без выключения начинали бы создавать отрицательные составляющие mab, mbc, mca (см. формулы 4а-в) общего момента М (4 г) или просто создавали бы маленький момент при неразумно больших собственных значених.
Формулы (4) получены алгебраическими преобразованиями известных формул модели АД в естественных осях из книги (6. Справочник по автоматизированному электроприводу / Под ред. В.А.Елисеева и А.В.Шинянского. - М.: Энергоатомиздат, 1983. - 616 с. На с.47)




Здесь φ - угол поворота ротора, M12 - коэффициент взаимной индуктивности между цепями ротора и статора. Составляющие моментов пропорциональны произведениям токов ротора и преобразованных токов статора. Для получения большого момента одновременно должны быть большими оба сомножителя. Из-за влияния угла поворота на левые сомножители (в скобках) в формулах (4) они имеют одинаковую частоту изменений, что и правые, но опережают по фазе их. Поэтому при включениях коммутаторов оба сомножителя в (4 а-в) получаются большими и развивается большой момент. Со временем ситуация меняется, левый сомножитель уменьшается, уменьшая и составляющую момента, а правый сомножитель - ток ротора - еще велик.
Согласно предлагаемому изобретению здесь токи ротора надо прервать потому, что они вызывают неоправданно большие потери энергии внутри АД без полезного эффекта. Положительный результат получается даже при полном преобразовании энергии возникающих коммутационных перенапряжений в тепло ограничителей перенапряжений, но он еще увеличивается при сбросе энергии перенапряжений в сеть электропитания. Огромная величина коммутационных перенапряжений на коммутаторах позволяет осуществлять частичный сброс энергии скольжения из роторной цепи в сеть электропитания на любых участках механической характеристики АД, чего нельзя получить в АВК, где при малых скольжениях напряжения в роторной цепи малы согласно формуле (3) и работа инвертора сброса энергии в сеть невозможна.
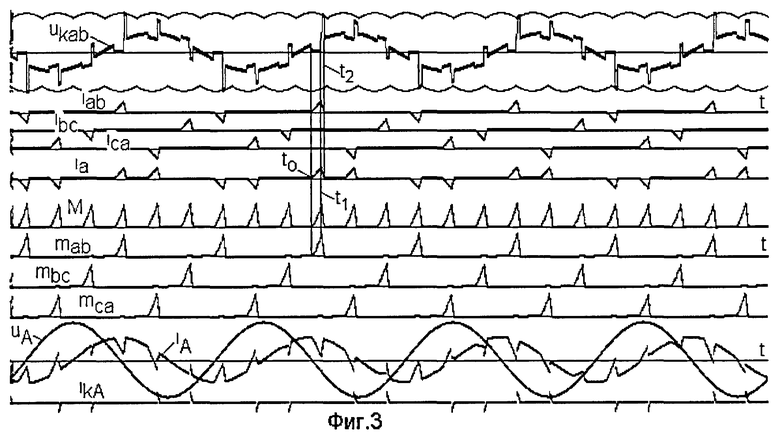
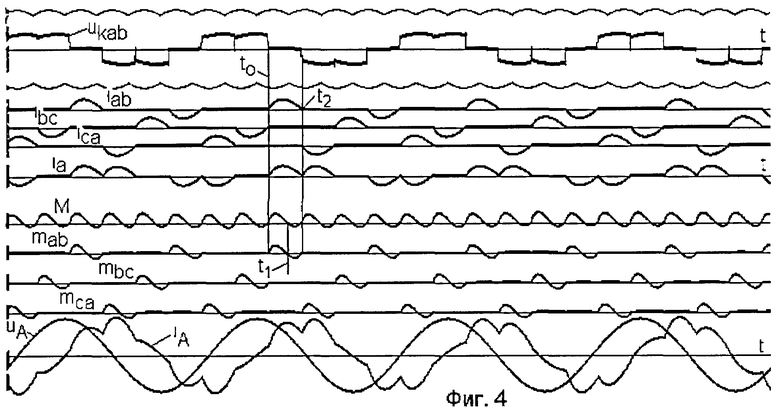
На фиг.3, 4 показано - сверху вниз: напряжение ukab на коммутаторе ab 4, токи коммутаторов iab, ibc, ica, ток фазы ротора ia, общий электромагнитный момент двигателя М и его составляющие m ab, mbc, m ca по формулам (4), напряжение фазы А статора uA и ее ток iA. Только на фиг.3 внизу показан ток ikA фазы А трансформатора 6, а ток сети iA представлен суммой тока АД и сбрасываемого в сеть тока ikA.
Схемы на фиг.1, 2 состоят из подключенного к сети электропитания 1 своей цепью статора асинхронного двигателя (АД) с фазным ротором 2, с естественными и искусственными индуктивностями и другими ограничителями токов в его роторной цепи 3 (например, дроссели со сталью) с индивидуальными независимыми коммутаторами в цепи ротора 4, ограничителей перенапряжений 5 на коммутаторах, преимущественно с устройствами сброса энергии перенапряжений на коммутаторах в сеть электропитания 1. На фиг.1 приведен пример построения ограничителей перенапряжений 5 с устройствами сброса энергии в сеть электропитания 1 через согласующие трансформаторы 6. В примере на фиг.1 ограничители включают в себя нелинейные ограничители перенапряжений (варисторы) 7, переводящие их энергию в тепло, трехфазный выпрямительный мост 8 на диодах и управляемый инвертор 9 на тиристорах. Не показаны на схемах конкретные схемы управления коммутаторами 4 и инвертором 9, поскольку в рамках предлагаемого способа управления процессами преобразования энергии в АД конкретных способов управления коммутаторами и инвертором может быть много.
На схемах фиг.1, 2 асинхронный двигатель АД 2 цепью статора подключен с сети электропитания 1, а цепью ротора - к искусственным индуктивностям (дросселям с потерями энергии на вихревые токи в стали) 3 и коммутаторам 4. В вариантах реализации способа искусственных индуктивностей может даже не быть. Тогда индуктивности 3 на схеме фиг.1 являют собой естественные индуктивности АД. На схеме фиг.1 коммутаторы 4 включены после индуктивностей 3, на схеме фиг.2 применены две трехфазные группы коммутаторов и индуктивностей, причем одна группа коммутаторов подключена прямо к цепи ротора АД. Во всех случаях (фиг.1, 2) параллельно коммутаторам 4 подключены ограничители перенапряжений 5. На фиг.1 внутри ограничителей перенапряжений 5 параллельно коммутаторам 4 включены нелинейные ограничители 7 и входы переменного тока моста 8. Выходы постоянного тока моста подключены к входам постоянного тока инвертора 9, выходы переменного тока которого через согласующий трансформатор 6 подключены к сети электропитания 1.
Суть способа поясняется на примере его применения к схеме на фиг.1. Диаграммы ее работы при предлагаемом (фиг.3) и известном (фиг.4) способах управления получены моделированием на ЭВМ системы дифуравнений модели АД, дифуравнений дросселей со сталью. Удовлетворительная адекватность модели подтверждена экспериментами на реальном двигателе при одном режиме работы. Эксперименты на ЭВМ при всех возможных режимах работы, на всех участках механической характеристики АД показали преимущества предлагаемого способа управления в виде снижения токов ротора и статора при равных условиях для исполнительного механизма электропривода, т.е. при одинаковых скоростях ω и моментах М. Однако получаемые при этом диаграммы работы оказались очень сложными для объяснений и зрительного восприятия. Поэтому на фиг.3, 4 выбран самый простой режим работы АД и коммутаторов без перекрытий токов коммутаторов (iab, ibc, ica) или прерывистый режим их работы, когда отсутствуют моменты одновременного включения двух коммутаторов. Такое получается при малых значениях скорости и момента. Выбран самый простой режим симметричной работы коммутаторов. Численные значения скорости и момента в экспериментах приведены в формуле (5), в ней же рассчитан КПД идеальной муфты скольжения по формуле (1) при этих значениях.

В крановом электроприводе важно получение малых скоростей, которые даже получили свой термин - "ползучие". Из-за поворота ротора частоты токов ротора ia и статора iA получаются разными, пульсации тока ua передаются и перераспределяются в разные фазы статора. В токе статора преобладает значительный ток намагничивания АД (фиг.3, 4). Конкретные значения моментов включений и отключений коммутаторов определяют из условий получения желаемых механических характеристик.
На фиг.3 коммутатор фаз ротора ab включают в момент времени t0. Нарастает ток iab через него. Нарастают и электромагнитные моменты m ab и М согласно формул (4 а, г). Естественное отключение коммутатора произошло бы в момент t2, что показано на фиг.4. Но согласно изобретению на фиг.3 до этого момента коммутатор отключают в момент времени t2. В естественных индуктивностях АД и в искусственно введенных индуктивностях 3 на момент t1 запасена энергия, которая не может мгновенно рассеяться, а индуктивный ток не может мгновенно прерваться. Поэтому этот ток переключается на цепь ограничителя напряжения 5, возникающее при этом на коммутаторе перенапряжение ukab получается равным напряжению ограничителя 5. В простейшем случае это может быть постоянное напряжение варисторов 7 (фиг.1), а в рассматриваемом на фиг.3 примере оно имеет вид и значение напряжения трехфазной мостовой схемы выпрямления. Оно показано плавно пульсирующими линиями, между которыми изменяется напряжение ukab, но никогда не сможет выйти за эти линии. Ток iab в момент t1 мгновенно переключается с коммутатора 4 на цепь ограничителя 5. Далее он через выпрямитель 8, инвертор 9, согласующий трансформатор 6 попадает в сеть 1 (см. ikA). Энергия коммутационных перенапряжений при этом сбрасывается в сеть электропитания. В момент времени t2 ток iab прекращается. На диаграмме iA (сумма тока статора АД 2 и трансформатора 6) видны скачки тока ikA, но влияние их на форму незначительно. На фиг.3 видно, что на диаграммах момента и его трех составляющих отсутствуют отрицательные значения.
На фиг.4 те же диаграммы повторены для известного способа управления (5). На диаграммах моментов появились отрицательные участки в правых частях интервалов существований токов коммутаторов. Ток статора iA стал заметно больше. Однако хорошим следует признать отсутствие коммутационных перенапряжений ukab на коммутаторе, плавную без скачков форму тока статора iA.
В таблице 1 приведены результаты численных измерений интегральных значений в схеме фиг.1 при предлагаемом (фиг.3) и известном (фиг.4) способах управления при выше оговоренных условиях (5).
мый
Здесь  - среднеквадратичное значение трех токов статора только АД; Isk - такое же значение токов сети, т.е. токов статора в сумме с токами сброса в сеть коммутационных перенапряжений; КПД и КПДк - коэффициенты полезного действия сравниваемых способов без учета и с учетом энергии коммутационных перенапряжений. Сравнение показывает заметное преимущество предлагаемого способа перед известным по уменьшению тока статора, повышению КПД. Тепловые потери внутри АД при малой его загрузке на ползучей скорости оказались большими, поэтому оба КПД оказались меньше КПД идеальной муфты скольжения (5). Сброс в сеть энергии коммутационных перенапряжений почти не уменьшил ток статора, но заметно повысил КПДк.
- среднеквадратичное значение трех токов статора только АД; Isk - такое же значение токов сети, т.е. токов статора в сумме с токами сброса в сеть коммутационных перенапряжений; КПД и КПДк - коэффициенты полезного действия сравниваемых способов без учета и с учетом энергии коммутационных перенапряжений. Сравнение показывает заметное преимущество предлагаемого способа перед известным по уменьшению тока статора, повышению КПД. Тепловые потери внутри АД при малой его загрузке на ползучей скорости оказались большими, поэтому оба КПД оказались меньше КПД идеальной муфты скольжения (5). Сброс в сеть энергии коммутационных перенапряжений почти не уменьшил ток статора, но заметно повысил КПДк.
В таблице 2 приведены результаты эксперимента на ЭВМ при увеличенном моменте на той же скорости ω=10 [1/с]. При этом начались режимы перекрытий токов коммутаторов, диаграммы стали сложнее, чем на фиг.3, 4, они не приводятся в описании изобретения.
емый
Значительное увеличение момента незначительно увеличило токи статора потому, что в предыдущем эксперименте значительно было влияние тока намагничивания АД. Положительный эффект предлагаемого способа стал заметнее. Заметнее стал и эффект от сброса энергии коммутационных перенапряжений в сеть электропитания. Особый интерес представляет значение КПДк=3.3% потому, что оно стало больше значения КПДскол=3.18% идеальной муфты скольжения (5). Начал сказываться эффект АВК! Но теперь этот эффект может получаться на любых скоростях АД потому, что величина коммутационных перенапряжений ничем не ограничена, а ЭДС ротора Ерот строго определяется величиной скольжения (3).
Таким образом, предложен способ управления процессами преобразования энергии в АД с фазным ротором, который сможет повысить момент, КПД, снизить потери в ограничителях тока ротора и уменьшить их габариты. Расплатой за это будут удорожание коммутаторов из-за перенапряжений на них, искажение формы тока сети. Способ может применяться совместно с известными способами управления АД, включая АВК. Переходы от одного способа к другому получаются плавными. По сути, предложенный способ заполняет упущенные возможности известных способов, дополняет их.
Возвращение энергии коммутационных перенапряжений из цепи ротора в сеть электропитания дополнительно повышает КПД.
| название | год | авторы | номер документа |
|---|---|---|---|
| АСИНХРОННЫЙ ДВИГАТЕЛЬ | 1992 |
|
RU2088042C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Электропривод переменного тока | 1985 |
|
SU1272463A1 |
| ПУСКОРЕГУЛИРУЮЩЕЕ УСТРОЙСТВО ДЛЯ АСИНХРОННОГО ДВИГАТЕЛЯ | 2015 |
|
RU2596218C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ АСИНХРОННОГО ДВИГАТЕЛЯ | 1992 |
|
RU2027299C1 |
| Электропривод переменного тока | 1990 |
|
SU1767687A1 |
| УСТРОЙСТВО ПРЕОБРАЗОВАНИЯ ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ | 2000 |
|
RU2167071C1 |
| СПОСОБ УПРАВЛЕНИЯ АСИНХРОННЫМ ГЕНЕРАТОРОМ ПРИ ПАРАЛЛЕЛЬНОЙ РАБОТЕ С СЕТЬЮ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2417501C1 |
| ЧАСТОТНО-ТОКОВЫЙ ЭЛЕКТРОПРИВОД И СПОСОБ КОММУТАЦИИ ВЕНТИЛЕЙ В ЕГО СХЕМЕ | 2013 |
|
RU2548679C2 |
| СХЕМА ПОДКЛЮЧЕНИЯ МНОГОФАЗНОГО АСИНХРОННОГО ДВИГАТЕЛЯ К ИСТОЧНИКУ ПОСТОЯННОГО ТОКА | 2009 |
|
RU2406217C1 |
Изобретение относится к области электротехники и может быть использовано в электроприводах переменного тока на базе асинхронного двигателя (АД) с фазным ротором, преимущественно для крановых механизмов подъема и передвижения. Технический результат заключается в увеличении электромагнитного момента АД с одновременным уменьшением токов ротора и статора за счет индивидуальных выключений коммутаторов (полностью управляемые вентили, выключаемые тиристоры, транзисторы) в цепи ротора, когда эти токи индивидуально начинают создавать отрицательные составляющие общего момента или создают маленький момент. В результате уменьшаются токи, повышается КПД и увеличивается момент АД. Технический результат достигается даже при полном преобразовании энергии коммутационных перенапряжений на коммутаторах в тепло ограничителей перенапряжений, но эффект еще увеличивается при сбросе энергии перенапряжений в сеть электропитания. Огромная величина коммутационных перенапряжений позволяет осуществлять частичный сброс энергии скольжения из роторной цепи в сеть на любых участках механической характеристики АД. Значения моментов включений и отключений коммутаторов определяют из условий получения желаемых характеристик. 4 ил., 2 табл.
Способ управления процессами преобразования энергии в асинхронном двигателе с фазным ротором, при котором подключают статорную обмотку двигателя к сети электропитания, ограничительные индуктивности и коммутаторы подключают к цепи ротора двигателя, индивидуально определяют моменты включений коммутаторов и включают их, отличающийся тем, что до моментов естественного отключения коммутаторов индивидуально определяют моменты их выключения и принудительно отключают их, а энергию образовавшихся из-за выключений индуктивностей коммутационных перенапряжений сбрасывают через ограничители перенапряжений в сеть электропитания цепи статора асинхронного двигателя и в тепловые потери энергии внутри ограничителей.
| СПОСОБ УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ С ФАЗНЫМ РОТОРОМ | 1999 |
|
RU2202850C2 |
| RU 2052883 C1, 20.01.1996 | |||
| СПОСОБ УПРАВЛЕНИЯ АВТОМАТИЗАЦИЕЙ ПУСКО-ТОРМОЗНЫХ РЕЖИМОВ ДРОССЕЛЬНОГО АСИНХРОННОГО ЭЛЕКТРОПРИВОДА | 2006 |
|
RU2311725C1 |
| СПОСОБ ПОЛУЧЕНИЯ ГРАНУЛИРОВАННОГО БЕЗ СВЯЗУЮЩЕГО ЦЕОЛИТА ТИПА А ВЫСОКОЙ ФАЗОВОЙ ЧИСТОТЫ | 2009 |
|
RU2420456C1 |
| US 2003071596 A1, 17.04.2003 | |||
| DE 102006018160 A1, 25.10.2007 | |||
| JP 63202290 A, 22.08.1988 | |||
| Устройство для контроля непараллельности соосных цилиндрических поверхностей | 1987 |
|
SU1499099A1 |

