Использование: в электроприводах переменного тока на базе асинхронного двигателя с фазным ротором преимущественно для крановых механизмов подъема и передвижения, требующих получения пониженных (ползучих) скоростей. Сущность изобретения: формирование для каждого тиристора своего опорного напряжения из фактических напряжений роторной цепи путем суммирования с различными коэффициентами напряжений цепи их фильтрации, сравнение опорного напряжения с заданным и включение тиристора в момент этого сравнения обеспечивает параметрическую стабилизацию скорости ротора при ограничении пульсаций электромагнитного момента.
Изобретение относится к электротехнике и может быть использовано в электроприводах переменного тока на базе асинхронного двигателя с фазным ротором преимущественно для крановых механизмов подъема и передвижения, требующих получения пониженных (ползучих) скоростей.
Известен способ вертикального фазового управления путем определения углов задержек моментов включений тиристоров сравнением задающего и отдельного для каждого тиристора опорного напряжения с монотонно изменяющимся фронтом на рабочем участке (пилообразная форма). При этом каждое опорное напряжение формируют из фактических трехфазных напряжений сети в электроприводах постоянного тока и в статорных цепях асинхронных двигателей [1]. Существенным недостатком таких систем является дестабилизирующий эффект при колебаниях напряжения сети (рост напряжения сети уменьшает угол, что в гораздо больший степени увеличивает напряжение на нагрузке, чем рост амплитуды напряжения нагрузки). В настоящее время такие системы практически не применяются. Применение такого способа в роторных цепях асинхронных двигателей неизвестно. Переключение подобных преобразователей из статорных цепей в роторные требует некоторой переделки, специальной фазировки и установки задания согласно нижеописанному способу.
Известны импульсно-ключевые способы определения моментов подачи управляющих импульсов на тиристоры в роторных цепях асинхронных двигателей путем сравнения задающего напряжения и одного для всех тиристоров опорного напряжения (его часто называют сигналом параметрической обратной связи по ЭДС вращения ротора), формируемого из фактических напряжений в роторной цепи путем симметричных преобразований, чаще всего путем трехфазного выпрямления мостовыми или нулевыми схемами. При этом известны варианты мостового и нулевого выпрямления напряжения на кольцах ротора [2, 3] с импульсным включением сразу всех тиристоров [2] и с импульсным включением сначала одной фазы с переходом на полное включение по мере увеличения задания, затем другой и т. д. [3]. Известен вариант с формированием опорного напряжения трехфазным выпрямлением напряжения промежутков анод-катод трех тиристоров [4]. Эти способы обеспечивают очень простую параметрическую стабилизацию скорости, вполне удовлетворительную для кранового электропривода. Однако в этих случаях возникают значительные пульсации крутящего момента двигателя и его вибрация. Кроме того, участок параметрической стабилизации на механической характеристике электропривода получается меньше, а динамические показатели несколько хуже, чем в предлагаемом способе.
Здесь не рассматриваются известные импульсные способы с высокочастотной коммутацией, так как они требуют применения дорогих выключаемых тиристоров или транзисторов и не решают проблемы параметрической стабилизации скорости.
Наиболее близким к изобретению и принятым за прототип является способ фазового управления тиристорами в цепи ротора асинхронного двигателя [5], при котором фактические напряжения ротора преобразуют в опорные напряжения пилообразной формы с постоянными амплитудами и длительностью, равной половине периода напряжения ротора. При фазовом управлении пульсации момента получаются минимальными.
Однако при этом способе исчезает эффект параметрической стабилизации скорости аналогов [2, 3, 4], а технические исполнения получаются очень сложными.
Технический результат заключается в получении эффекта параметрической стабилизации скорости при ограничении пульсаций момента. Предложенные параметрические обратные связи обеспечивают лучшие динамические показатели за счет меньших запаздываний в своих контурах не только по сравнению с классическими системами регулирования по прототипу, но и в сравнении с упомянутыми способами импульсной параметрической стабилизации по аналогам.
Указанный технический результат достигается тем, что в способе управления асинхронным двигателем с фазным ротором и тиристорами или симисторами в цепи фазного ротора, при котором для тиристора или симистора каждого контура цепи фазного ротора сравнивают сформированное для тиристора или симистора каждого контура опорное напряжение с задающим и, когда опорное напряжение превышает задающее, включают тиристор или симистор каждого контура цепи фазного ротора, согласно изобретению для тиристора или симистора каждого контура цепи фазного ротора формируют разность линейных напряжений двух других контуров цепи фазного ротора, выпрямляют это напряжение, суммируют с линейным напряжением тиристора или симистора каждого контура цепи фазного ротора, изменяют форму этого напряжения так, что постоянная времени напряжения меньше, чем постоянная времени его спада и используют его в качестве опорного напряжения для тиристора или симистора каждого контура цепи фазного ротора.
По одному варианту в качестве линейного напряжения используют напряжение на кольцах фазного ротора.
По другому варианту в качестве линейного напряжения используют напряжение на тиристоре или симисторе.
На фиг. 1 представлена схема электропривода, реализующего способ управления асинхронным двигателем с фазным ротором,
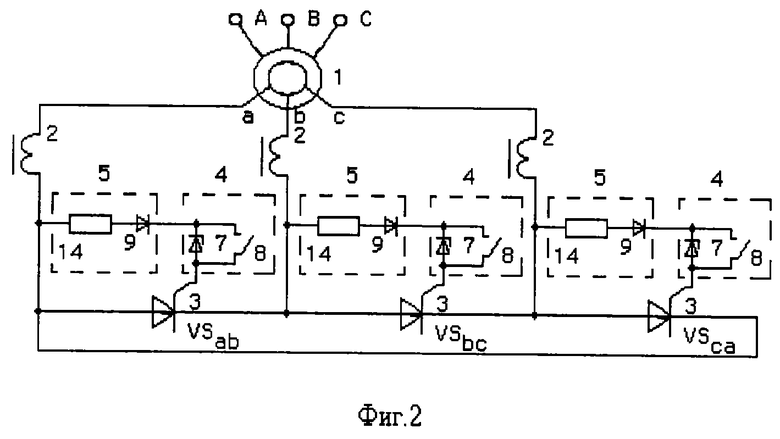
на фиг.2 - схема другого варианта электропривода,
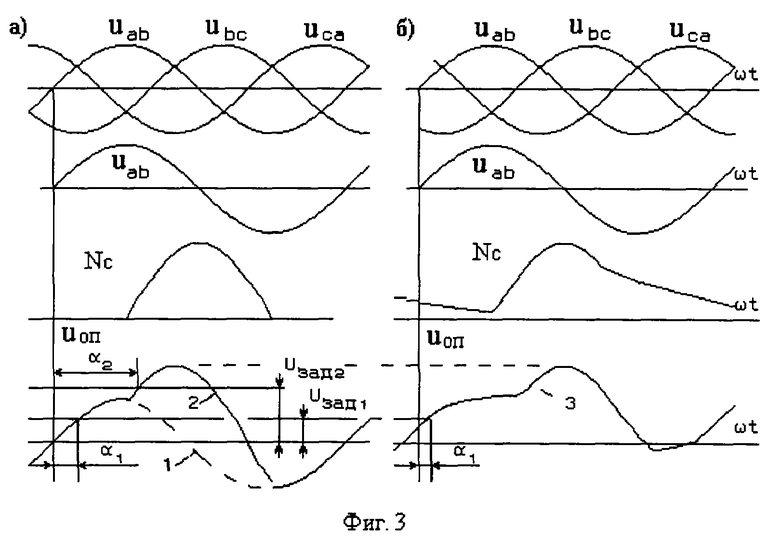
на фиг. 3 - диаграммы, поясняющие работу формирователя опорного напряжения, выполненного по схеме фиг.1 при выключенных тиристорах,
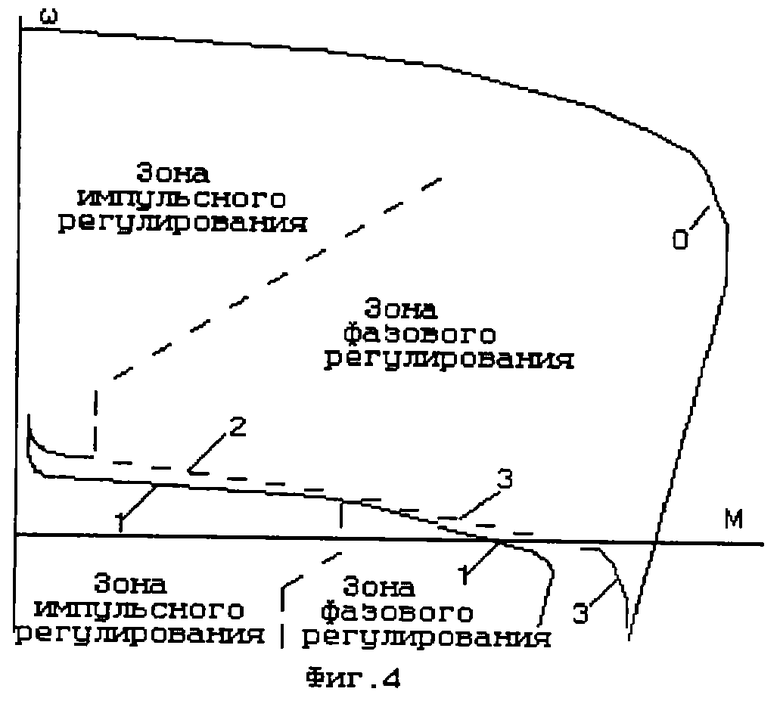
на фиг.4 - аппроксимированные механические характеристики, при этом характеристика 0 соответствует постоянно включенным тиристорам,
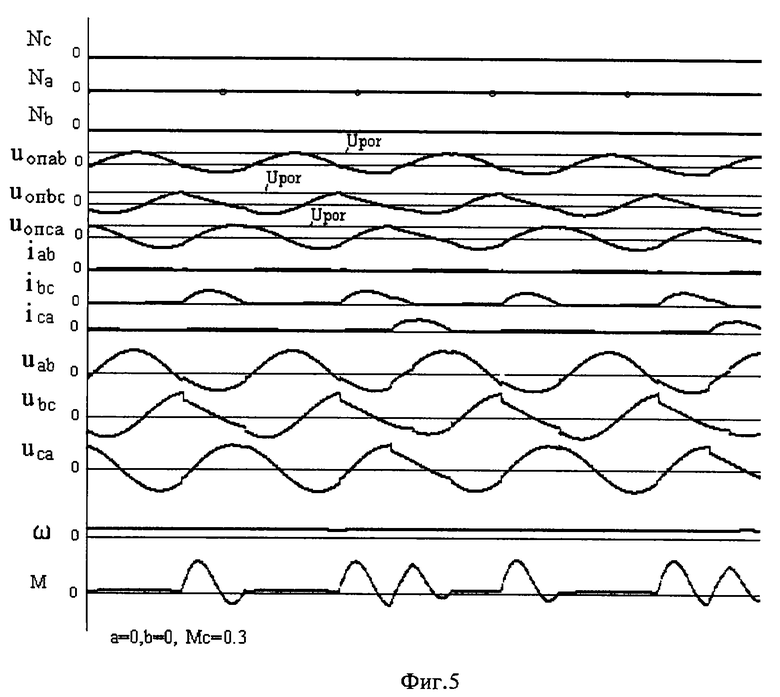
на фиг.5 - 8 - экспериментальные диаграммы сигналов в схеме фиг.1,
на фиг. 5 - при малом моменте без обмоток 6 других (чужих) контуров и выпрямителей на диодах 10, 11 (это соответствует "Зоне импульсного регулирования" характеристики А на фиг.4 и опорному напряжению A1 на фиг.3),
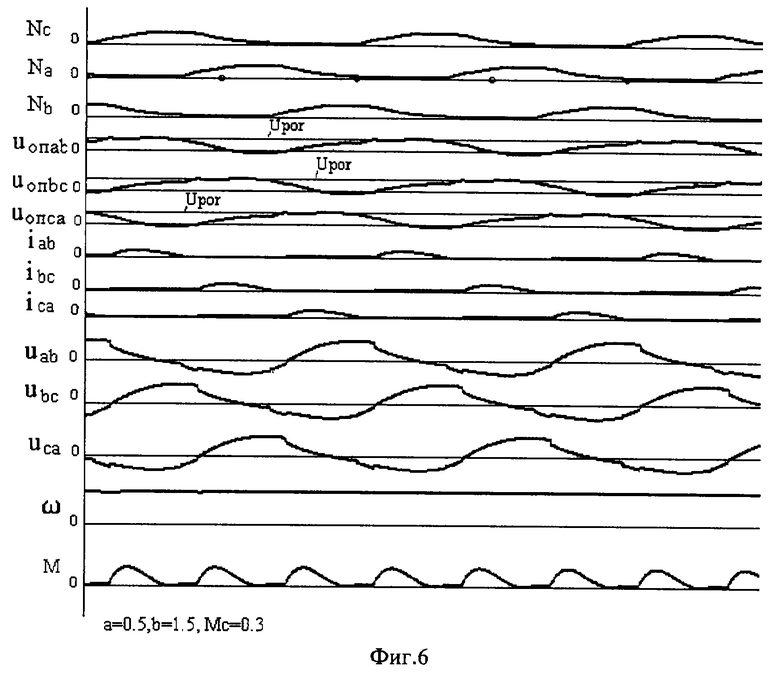
на фиг. 6 - при малом моменте и полной схеме (это соответствует характеристике на фиг.4 и опорному напряжению B1 на фиг.3),
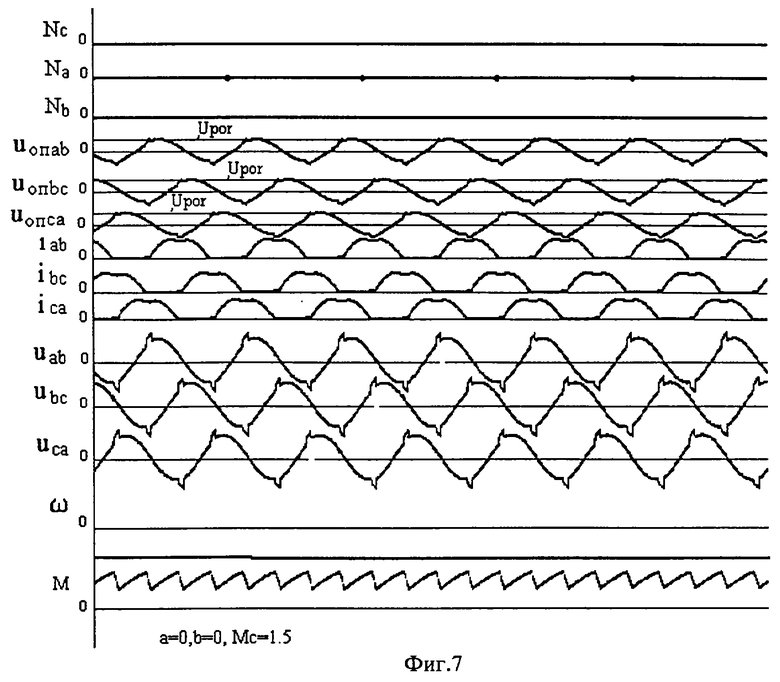
на фиг. 7 - при большом моменте без других контуров и выпрямителей (это соответствует "Зоне фазового регулирования" характеристики С на фиг.4 и опорному напряжению C1 на фиг.3),
на фиг.8 - при большом моменте и полной схеме (это соответствует характеристике Д на фиг.4 и опорному напряжению Д1 на фиг.3).
Электропривод, реализующий способ, состоит из асинхронного двигателя с фазным ротором и кольцами 1, импедансов 2 в виде индуктивностей с массивными замкнутыми сердечниками, которые могут быть заменены резисторами, и тиристоров 3 в цепи ротора. Возможно применение симисторов. Каждый тиристор пропускает пульс тока внутри "своего" контура, например, для фаз ротора "ab" своим является тиристор VSab, другие контуры являются "чужими", хотя между ними существует энергообмен.
Схема управления состоит из совмещенных в одной конструкции 4 (фиг.1, 2) 2 блоков задания, сравнения и формирования управляющих импульсов и формирователей опорных напряжений 5. Выходы блока 4 подключены к управляющим выводам тиристоров, входы - к выходам формирователей опорных напряжений. Согласно фиг. 1 входы формирователей опорных напряжений 5 в виде обмоток трансформаторов 6 подключены к кольцам ротора, а согласно фиг.2 - к промежуткам анод-катод тиристоров. На обеих фигурах блоки 4 выполнены в виде стабилитронов 7 и закорачивающих их контактов 8. Для получения нескольких установок скоростей последовательно могут быть включены несколько цепочек из стабилитронов на разные напряжения и контактов. На выходах формирователей опорных напряжений включены выпрямляющие диоды 9.
На фиг. 1 в формирователе опорных напряжений 5 вторичные обмотки трех трансформаторов 6 от разных фаз ротора включены последовательно, при этом две обмотки других (чужих) контуров подключены через выпрямитель на диодах 10, 11. Выход выпрямителя зашунтирован фильтрующей емкостью 12, а выход всего формирователя - емкостью 13. Величина тока управляющего импульса ограничивается только сопротивлением меди трех обмоток трансформатора. Если ток получается большим, то необходимо введение ограничивающего резистора.
На фиг. 2 в формирователе опорных напряжений 5 нет сопротивления меди трансформаторов, поэтому включен ограничивающий резистор 14.
Обе схемы электропривода работают следующим образом. Когда опорное напряжение Uoп превышает задающее напряжение Uзад, ток в цепи управляющего вывода тиристора 3 резко увеличивается, и он включается. В обоих схемах величина Uзад определяется напряжением стабилизации стабилитрона 7. Предлагаемый способ формирования опорных напряжений дает целый ряд положительных эффектов, что поясняется ниже.
Схемы фиг. 1, 2 работают в двух качественно разных режимах: пофазно импульсном (для краткости просто импульсном) при малых моментах на валу и фазовом при больших моментах. Соответствующие разным режимам зоны регулирования выделены на механических характеристиках электропривода фиг.4.
Напряжения на кольцах ротора Uab, Ubc, Uca примерно пропорциональны скольжению (1)
(1)
где ωo - синхронная скорость ротора, ω - скорость ротора, и сильно зависят от токов ротора всех фаз. Пояснения работы схемы делаются по диаграммам фиг. 3, когда управляющие импульсы формируются, но тиристоры не включаются. При этом рассматривается только установившийся квазистатический режим, когда усредненные значения статического и электромагнитного моментов равны за период повторяемости (фиг. 5...8). Этот период повторяемости включает в себя несколько периодов роторного напряжения при импульсном регулировании (фиг. 5).
Когда формирователь опорного напряжения 5 в контуре ротора ab выполнен без обмоток Tbc, Tca трансформаторов 6 чужих контуров, только линейное напряжение Uab формирует опорное напряжение в виде кривой 1 на фиг.3а.
При напряжении задания Uзад1 точка пересечения с кривой опорного напряжения определяет угол задержки включения α1 на фиг.3а. После включения тиристора все три напряжения в фазах ротора искажаются, что видно на диаграммах фиг.7. Когда скорость ротора уменьшается, то скольжение увеличивается согласно приведенной формуле, напряжение ротора увеличивается по амплитуде, при неизменном Uзад1 угол уменьшается, ток возрастает, электромагнитный момент возрастает, скорость восстанавливается. Таков механизм стабилизирующей параметрической обратной связи в "Зоне фазового регулирования" фиг.4. При этом пульсации момента малы, так как они соответствуют трехкратной частоте пульсаций напряжений ротора, а не пульсациям скорости ротора, что принципиально необходимо для известных решений [2, 3], где управляющие импульсы подаются сразу на все тиристоры. Предлагаемый способ защищает и случай фазового регулирования с шестикратной частотой пульсаций момента при удвоении числа тиристоров. При этом надо аналогично использовать отрицательную полуволну опорного напряжения.
При напряжении задания Uзад2 кривая опорного напряжения не пересекается и тиристор не включается. Однако в следующем периоде (или через несколько периодов), когда амплитуда опорного напряжения возрастает, оно касается уровня Uзад2 и тиристор включается с углом задержки около четверти периода роторного напряжения. Рост амплитуды происходит по двум причинам: 1) из-за падения скорости (увеличения скольжения); 2) из-за электромагнитных процессов вследствие коммутации тиристоров "чужих" контуров. Первая причина лежит в основе работы известных решений [2, 3, 4], где после срабатывания блока сравнения управляющие импульсы подаются сразу на все тиристоры, которые включаются одновременно, а, значит, с различными для разных фаз углами. При этом происходит сильный удар крутящего момента, двигатель разгоняется, амплитуда напряжения падает, тиристоры выключаются, двигатель замедляется, напряжение растет до следующего удара. Несколько смягчает эти удары жесткое логическое разрешение импульсного режима только в одной фазе при полном включении или отключении остальных [4]. Как видно из диаграмм сигналов фиг. 5, первая причина колебаний амплитуды опорного напряжения из-за колебаний скорости остается, но уже не является определяющей. Схема без жесткой логики переходит в пофазно импульсный режим работы. При этом все включения осуществляются с определенным углом задержки в четверть периода, что уменьшает амплитуду ударов момента. Схема фиг.1 была испытана на реальном приводе при предлагаемом по способу управления режиме работы фиг.5 и при одновременной подаче управляющих импульсов на все тиристоры согласно известному способу [2]. Амплитуда ударов момента по сравнению с известным способом управления уменьшилась в несколько раз, тогда как частота их возрасла.
Оба качественно разных режимов работы возникают при любом значении напряжения Uзад при изменении статического момента нагрузки. На фиг.4 на механической характеристике 1 показаны две примерно равные зоны качественно разной работы. Переход между двумя описанными качествами происходит плавно на реальном приводе.
Механическая характеристика 1 (фиг.4) заваливается при большом статическом моменте на валу двигателя, не достигнув максимально возможного значения, ограниченного естественной характеристикой полного включения 0 (фиг.4). Это ясно из диаграмм фиг.3. При постоянном Uзад1 и росте амплитуды опорной синусоиды 1(фиг.3а) угол α1 уменьшается, но не до нуля.
Когда формирователь опорного напряжения 5 в контуре ротора "ab" выполнен строго по схеме фиг.1, на последовательно включенных вторичных обмотках трансформаторов Tbc, Tca формируется напряжение
Nc=a•Ubc-b•Uca, (2)
где a, b - коэффициенты трансформации.
Это напряжение выпрямляется диодами 10, 11 и при а=1, b=1 показано на фиг. 3а, как диаграмма Nc. После суммирования с напряжением Uab получается новая форма опорного напряжения Uоп, показанная на фиг.3а диаграммой 2. Как видно из фигуры, при этом увеличивается зона изменения угла, при напряжении задания Uзад2 он составит значение α2, это означает все еще фазовый режим работы, а не импульсный при опорном напряжении с формой 1. На фиг.4 механическая характеристика приобретает вид 2. С механической точки зрения характеристика 2 фазового регулирования мягче характеристики 1 импульсного регулирования. Это ухудшение механически компенсируется отсутствием ударов момента при работе в фазовом режиме на характеристике 2. Зона импульсного регулирования характеристики 2 получается незначительно (фиг.4).
Включение фильтрующей емкости 12 изменяет форму напряжения Nc (фиг.3а) к форме фиг.3б. Постоянная времени нарастания сигнала получается гораздо меньше постоянной времени спада, так как при нарастании диод 0 открыт, и его сопротивление равно нулю, а при спаде этот диод отключается, и его бесконечное сопротивление уже не определяет постоянную времени разряда. Поэтому рассматриваемые диаграммы а фиг.3а,б сильно отличаются задними фронтами. К началу фронта напряжения Uab емкости 12, 13 не успевает разрядиться и приподнимает это напряжение. При том же Uзад1, что на фиг.3а, угол α1 уменьшается на фиг. 3б. При этом, чем больше падение скорости, тем меньше будет время разряда емкости 12, 13, тем меньше будет угол, тем меньше будет падение скорости на конец механической характеристики (характеристика 3 на фиг.4). Это расширяет рабочий диапазон почти до предельно возможного. В итоге в схеме фиг. 1 в полном объеме соответствуют сигналы фиг.3б при выключенных тиристорах, реальные сигналы фиг.6 (при малом моменте) и фиг.8 (при большом моменте), механическая характеристика 2+3 на фиг.4. Согласно формуле изобретения коэффициенты a, b в формуле (2) могут быть любыми и определяться при настройке. На фиг.6, 8 были подобраны значения а=0.5, b=1.5.
Перераспределением коэффициентов трансформации можно сдвинуть вперед напряжение, обозначенное как Uab на фиг.3а и получить нулевой угол задержки с полным диапазоном механической характеристики. Формула изобретения защищает этот вариант. Однако на практике эффект получается не столь заметным.
Как видно из фиг.3, изменение амплитуды опорного напряжения резко меняет величину угла задержки включения. Максимальная задержка реакции на возмущение не превышает трети периода роторного напряжения при представленных на фиг.1, 2 трехпульсных преобразователях. Хотя помехи искажений роторного напряжения также быстро влияют на изменения углов, но вызываемые ими возмущения уже через треть периода начинают компенсироваться быстродействующей параметрической обратно связью. В экспериментах эти помехи вызывали колебания момента с частотой не намного ниже частоты пульсаций роторного напряжения и не вызывали заметных колебаний скорости ротора. Применение классических систем фазового управления с симметричными импульсами и с обратными связями или от тахогенератора, или датчика частоты напряжения ротора, или трехфазного выпрямителя роторных напряжений и фильтра, как правило, устраняло описанные высокочастотные колебания момента, но при набросах возникал классический низкочастотный затухающий переходный процесс с заметными колебаниями скорости ротора.
В схеме фиг.2 в качестве опорного используется напряжение на тиристорах. При выключенных тиристорах напряжения на импедансах 2 равно нулю и напряжения на кольцах ротора и тиристорах совпадают. Поэтому работу можно пояснить аналогичным образом и с использованием диаграмм фиг.3а. При работе тиристоров на углы включений начинают сказываться искажения напряжений из-за работы соседних "чужих" фаз. Однако существенных качественных отличий не обнаружено. Была получена механическая характеристика, близка к 1 на фиг.4. Однако полные возможности использования в качестве опорных сигналов напряжений тиристоров представляются авторам беднее. Однако формула изобретения охватывает и этот вариант.
Реализация предлагаемого способа позволит создать простые, доступные неквалифицированному обслуживанию электропривода, преимущественно, крановых механизмов с получением ползучих скоростей при малых пульсациях момента.
Схема фиг. 1 успешно испытана на электродвигателе 4.5 кВт, разработана программа моделирования на ЭВМ этого привода, результаты эксперимента и моделирования совпали и приведены на фиг.5...8. После этого на модели были проверены все описанные варианты. Способ оказался применим и к двухфазному асинхронному приводу. Готовятся промышленные испытания привода.
Источники информации
1. Зимин Е.Н., Кацевич В.Л., Козырев С.К. Электроприводы постоянного тока с вентильными преобразователями. М.: Энергоиздат, 1981, с.55, рис.3.8.
2. SU 1179509, 15.09.1985.
3. SU 1539952, 30.01.1990.
4. SU 860252, 30.08.1981.
5. SU 646800, 15.04.1980.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ С ФАЗНЫМ РОТОРОМ | 2006 |
|
RU2300169C1 |
| СПОСОБ УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ С ФАЗНЫМ РОТОРОМ | 2006 |
|
RU2311724C1 |
| СПОСОБ УПРАВЛЕНИЯ ПРОЦЕССАМИ ПРЕОБРАЗОВАНИЯ ЭНЕРГИИ В АСИНХРОННОМ ДВИГАТЕЛЕ С ФАЗНЫМ РОТОРОМ | 2008 |
|
RU2393622C1 |
| СПОСОБ ИМПУЛЬСНО-ЧАСТОТНОГО РЕГУЛИРОВАНИЯ ЭЛЕКТРОПРИВОДА ПЕРЕМЕННОГО ТОКА С ИСТОЧНИКОМ ИЗМЕНЯЕМОЙ ЧАСТОТЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2574380C2 |
| Реверсивный асинхронный электропривод | 1988 |
|
SU1539951A1 |
| СПОСОБ СТАБИЛИЗАЦИИ МОМЕНТА ВРАЩЕНИЯ СИЛОВЫХ ГИРОСТАБИЛИЗАТОРОВ | 2008 |
|
RU2385530C1 |
| ЭЛЕКТРИЧЕСКИЙ ПРИВОД ПЕРЕМЕННОГО ТОКА | 1992 |
|
RU2025037C1 |
| УСТРОЙСТВО ДЛЯ ТОРМОЖЕНИЯ АСИНХРОННОГО ДВИГАТЕЛЯ | 2012 |
|
RU2489796C1 |
| Устройство для регулирования скорости трехфазного асинхронного двигателя с фазным ротором | 1982 |
|
SU1116515A2 |
| ЭЛЕКТРИЧЕСКИЙ ПРИВОД ПЕРЕМЕННОГО ТОКА | 1993 |
|
RU2085017C1 |

Изобретение относится к электротехнике и может быть использовано в электроприводах переменного тока на базе асинхронного двигателя с фазным ротором, преимущественно для крановых механизмов подъема и передвижения, требующих получения пониженных (ползучих) скоростей. Технический результат заключается в получении эффекта параметрической стабилизации скорости при ограничении пульсаций момента. В способе управления асинхронным двигателем с фазным ротором и кольцами, роторными импедансами, тиристорами или симисторами, при котором момент включения тиристоров определяют путем сравнения задающих и опорных напряжений с преимущественно монотонно изменяющимися фронтами на рабочих участках и включают тиристоры или симисторы в определяемые таким образом моменты. Для каждого тиристора или симистора момент включения определяют независимо от остальных, а его отдельное опорное напряжение формируют из фактических напряжений в силовой цепи путем их суммирования и фильтрации с различными коэффициентами и постоянными времени. 2 з.п. ф-лы, 8 ил.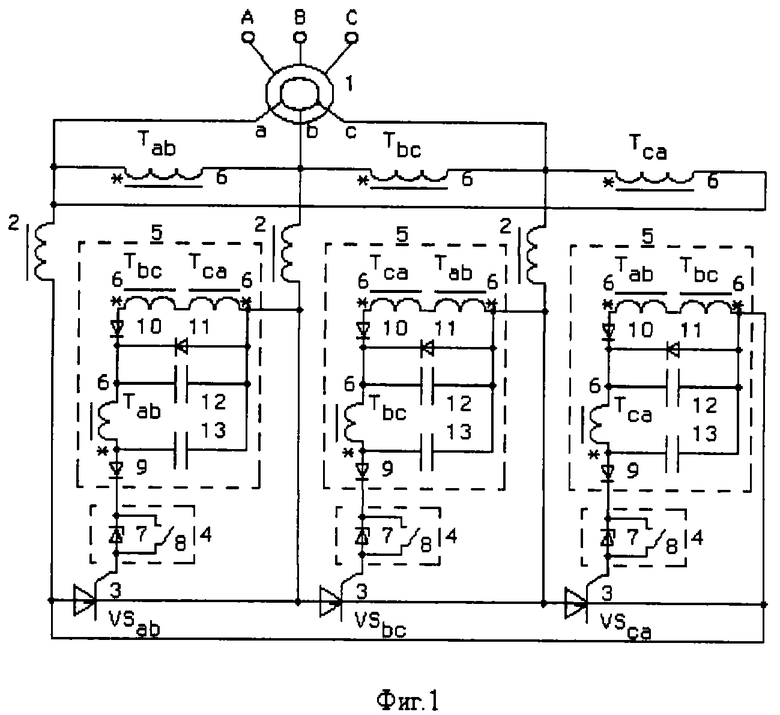
| Способ управления асинхронным электродвигателем с фазным ротором и устройство для его осуществления | 1976 |
|
SU646800A1 |
| Устройство для управления асинхронным электродвигателем | 1987 |
|
SU1525854A1 |
| Электропривод переменного тока | 1988 |
|
SU1539952A1 |
| Способ управления асинхронным электродвигателем с фазным ротором и устройство для его осуществления | 1989 |
|
SU1683165A1 |

