Изобретение относится к электротехнике, а именно к системам регулируемого электропривода на базе двигателя двойного питания.
Известен способ регулирования частоты вращения двигателя двойного питания, при котором обмотку статора питают напряжением постоянной амплитуды, а обмотку ротора - регулируемым напряжением от преобразователя частоты, измеряют мгновенные значения линейных напряжений между фазами обмоток ротора, определяют моменты коммутации ключей инвертора преобразователя частоты, коммутируя ключи инвертора, устанавливают заданную частоту вращения двигателя, а регулирование частоты вращения осуществляют изменением величины подведенного к обмотке ротора напряжения [1].
Недостатками данного способа регулирования частоты вращения двигателя двойного питания являются работа двигателя со скольжением, большим единицы, большим уровнем ЭДС в обмотке ротора, т.к. величина ЭДС ротора пропорциональна скольжению, а также низкий коэффициент мощности электропривода.
Наиболее близким к заявленному является способ регулирования частоты вращения двигателя двойного питания, при котором в обмотку статора подают напряжение постоянной амплитуды, а в обмотку ротора через преобразователь частоты подают регулируемое трехфазное напряжение, направленное встречно ЭДС обмотки ротора и превышающее его по величине. Изменяя величину подведенного к обмотке ротора напряжения путем изменения сигнала задания на входе преобразователя частоты, регулируют частоту вращения двигателя до тех пор, пока она станет по величине больше, чем частота вращения поля статора. После этого изменяют чередование напряжения в обмотке статора двигателя, одновременно уменьшают напряжение задания на входе преобразователя частоты. Изменяя величину подведенного к обмотке ротора напряжения путем изменения сигнала задания на входе преобразователя частоты, регулируют частоту вращения двигателя при значениях, превышающих по величине частоту вращения поля статора [2].
Недостатками данного способа регулирования частоты вращения двигателя двойного питания являются низкие энергетические показатели вследствие увеличения скольжения двигателя по мере увеличения частоты вращения, а также нелинейность механических характеристик двигателя.
В предлагаемом способе регулирования частоты вращения двигателя двойного питания на начальные выводы обмотки статора и на выводы обмотки ротора подают напряжение, частоту вращения двигателя регулируют с помощью преобразователя частоты, после разгона ротора двигателя до порогового значения частоты вращения изменяют чередование фаз в обмотке двигателя, а регулирование частоты вращения осуществляют путем изменения сигналов задания на входе преобразователя частоты, в начальный момент пуска конечные выводы обмотки статора и выводы обмотки ротора замыкают накоротко, на выходе преобразователя частоты задают начальные значения частоты и напряжения и разгоняют ротор двигателя до порогового значения частоты вращения, после чего размыкают конечные выводы обмотки статора и выводы обмотки ротора, подключают выводы одной фазы обмотки ротора к конечным выводам одной фазы обмотки статора, выводы обмотки ротора последующей фазы - к конечным выводам обмотки статора предыдущей фазы, выводы обмотки ротора предыдущей фазы - к конечным выводам обмотки статора последующей фазы, одновременно с подключением выводов обмотки ротора к конечным выводам обмотки статора уменьшают частоту и напряжение на выходе преобразователя частоты, причем частоту уменьшают до уровня, при котором частота вращения поля статора будет равна половине от порогового значения частоты вращения ротора, после втягивания двигателя в синхронизм для регулирования частоты вращения двигателя плавно изменяют сигналы задания уровня частоты и напряжения на входе преобразователя частоты.
В данном способе регулирования частоты вращения двигателя двойного питания обеспечивается синхронный режим работы двигателя с абсолютно жесткими механическими характеристиками.
На чертеже представлена функциональная схема устройства, в котором реализуется способ регулирования частоты вращения двигателя двойного питания.
Устройство для регулирования частоты вращения двигателя двойного питания содержит асинхронный двигатель, имеющий трехфазную статорную обмотку 1, и трехфазную роторную обмотку 2, начальные выводы обмотки статора подключены к выходу трехфазного преобразователя частоты 3, силовой вход которого подключен к питающей сети, конечный вывод первой фазной обмотки статора 4 подключен к выводу первой фазной обмотки ротора 5, вывод второй фазной обмотки статора 6 подключен к выводу третьей фазной обмотки ротора 7, конечный вывод третьей фазной обмотки статора 8 подключен к выводу второй фазной обмотки ротора 9, к точке соединения конечного вывода первой фазной обмотки статора и первой фазной обмотки ротора подключен вывод первого подвижного размыкающего контакта 10 коммутирующего аппарата, к точке соединения конечного вывода второй фазной обмотки статора и третьей фазной обмотки ротора подключены выводы первого неподвижного контакта 11 и второго подвижного размыкающего контакта 12 коммутирующего аппарата, к точке соединения конечного вывода третьей фазной обмотки статора и второй фазной обмотки ротора подключен вывод второго неподвижного контакта 13 коммутирующего аппарата, катушка которого 14 подключена к питающей сети через замыкающий контакт 15 центробежного реле 16, расположенного на одном валу с синхронизированным асинхронным двигателем, сигнальный вход блока управления 17 соединен с источником сигнала через второй замыкающий контакт 18 центробежного реле 16, первый выход 19 блока управления 17, осуществляющий задание частоты, соединен с первым управляющим входом преобразователя частоты 3, второй выход 20 блока управления 17, осуществляющий задание напряжения, соединен со вторым управляющим входом преобразователя частоты 3.
Способ регулирования частоты вращения в устройстве осуществляется следующим образом. При пуске в начальный период разгона двигателя замкнуты подвижные контакты 10 и неподвижные 11, а также подвижные контакты 12 и неподвижные контакты 13 коммутирующего аппарата, при этом конечные выводы обмотки статора и выводы обмотки ротора замкнуты накоротко и двигатель работает в асинхронном режиме. Блок управления 17 задает начальные значения напряжения и частоты на выходе преобразователя частоты 3.
Частота вращения поля статора определяется по формуле
ω0=2πf1/Pn,
где f1 - частота на выходе преобразователя частоты; Pn - число пар полюсов двигателя.
Начальная задаваемая частота f1 должна быть такой, чтобы магнитное поле статора вращалось с частотой вращения, большей, чем пороговая частота срабатывания центробежного реле 16, ω>ωпор.
Двигатель начинает разгоняться в асинхронном режиме. При достижении двигателем частоты вращения, равной пороговому значению ω=ωпор, срабатывает центробежное реле 16 и замыкает свой контакт 15 и контакт 18. Катушка 14 коммутирующего аппарата получает питание, подвижный контакт 10 размыкается с неподвижным контактом 11, подвижный контакт 12 размыкается с неподвижным контактом 13. Обмотка статора 1 двигателя будет соединена последовательно с обмоткой ротора 2 двигателя. Одновременно после замыкания контакта 18 центробежного реле 16 блок управления 17 получает сигнал для перехода во второй режим работы. Блок управления 17 изменяет значения сигналов задания напряжения и частоты для преобразователя частоты 3. Причем частоту f1 на выходе преобразователя частоты скачкообразно уменьшают до уровня f1синх, при котором частота вращения поля статора ω0синх будет равна половине от порогового значения частоты вращения ротора, при котором срабатывает центробежное реле ωпор
ω0синх=0.5ωпор.
Значение частоты f1синх, при которой двигатель втянется в синхронизм, определяется
f1синх=ωпор/Pn/4.
После переключения коммутирующего аппарата и установки частоты f1синх на выходе преобразователя частоты магнитное поле ротора ω2 вращается с такой же по величине частотой, как и магнитное поле статора ω0, но в направлении противоположном направлению вращения магнитного поля статора
ω2=-ω0.
Ротор будет вращаться в том же направлении, что и магнитное поле статора с частотой, в два раза большей, чем частота вращения поля статора
ω=2ω0.
Двигатель, получающий двойное питание, втягивается в синхронный режим работы.
После втягивания двигателя в синхронизм можно плавно регулировать частоту его вращения. Для этого с помощью блока управления 17 регулируют частоту f1 и напряжение U1 на выходе преобразователя частоты 3.
Обеспечение работы двигателя в синхронном режиме позволяет получить абсолютно жесткие механические характеристики двигателя и улучшенные энергетические показатели.
Список литературы
1. Авторское свидетельство СССР №1621136. Способ регулирования частоты вращения двигателя двойного питания. МКИ H02P 7/63, 1992.
2. Патент РФ №2076450. Способ регулирования частоты вращения двигателя двойного питания и устройство для его осуществления. МКИ H02P 7/36, 7/63, 1997.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод | 1981 |
|
SU1083319A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ ДВИГАТЕЛЯ ДВОЙНОГО ПИТАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2076450C1 |
| СИНХРОНИЗИРОВАННЫЙ АСИНХРОННЫЙ ДВИГАТЕЛЬ | 2007 |
|
RU2342766C1 |
| Устройство для управления машиной двойного питания /его варианты/ | 1982 |
|
SU1116516A1 |
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНЫМ АСИНХРОННЫМ ГЕНЕРАТОРОМ | 2019 |
|
RU2760393C2 |
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНЫМ АСИНХРОННЫМ ГЕНЕРАТОРОМ | 2021 |
|
RU2761868C1 |
| Устройство для управления двигателем двойного питания | 2016 |
|
RU2625720C1 |
| Способ управления асинхронным двигателем с фазным ротором | 2022 |
|
RU2786694C1 |
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНЫМ АСИНХРОННЫМ ГЕНЕРАТОРОМ | 2015 |
|
RU2606643C1 |
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНЫМ АСИНХРОННЫМ ДВИГАТЕЛЕМ | 2013 |
|
RU2539347C1 |
Изобретение относится к электротехнике, а именно к системам регулируемого электропривода на базе двигателя двойного питания. В предлагаемом способе регулирования частоты вращения двигателя двойного питания обмотку статора двигателя подключают к преобразователю частоты, в начальный момент пуска конечные выводы обмотки статора и выводы обмотки ротора замыкают накоротко, на выходе преобразователя частоты задают начальные значения частоты и напряжения и разгоняют ротор двигателя до порогового значения частоты вращения, после чего размыкают конечные выводы обмотки статора и выводы обмотки ротора, подключают выводы одной фазы обмотки ротора к конечным выводам одной фазы обмотки статора, выводы обмотки ротора последующей фазы - к конечным выводам обмотки статора предыдущей фазы, выводы обмотки ротора предыдущей фазы - к конечным выводам обмотки статора последующей фазы, одновременно с подключением выводов обмотки ротора к конечным выводам обмотки статора уменьшают частоту и напряжение на выходе преобразователя частоты, причем частоту уменьшают до уровня, при котором частота вращения поля статора будет равна половине от порогового значения частоты вращения ротора, после втягивания двигателя в синхронизм для регулирования частоты вращения двигателя плавно изменяют сигналы задания уровня частоты и напряжения на входе преобразователя частоты. Технический результат - обеспечение абсолютно жестких механических характеристик двигателя двойного питания за счет получения синхронного режима его работы. 1 ил.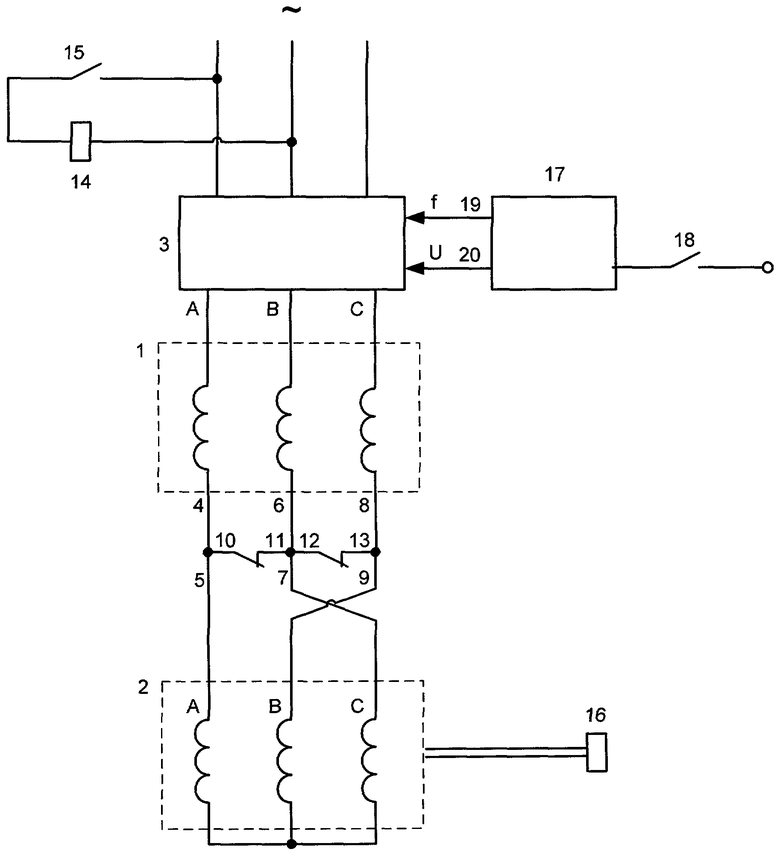
Способ регулирования частоты вращения двигателя двойного питания, при котором на начальные выводы обмотки статора и на выводы обмотки ротора подают напряжение, частоту вращения двигателя регулируют с помощью преобразователя частоты, после разгона ротора двигателя до порогового значения частоты вращения изменяют чередование фаз в обмотке двигателя, а регулирование частоты вращения осуществляют путем изменения сигналов задания на входе преобразователя частоты, отличающийся тем, что в начальный момент пуска конечные выводы обмотки статора и выводы обмотки ротора замыкают накоротко, на выходе преобразователя частоты задают начальные значения частоты и напряжения и разгоняют ротор двигателя до порогового значения частоты вращения, после чего размыкают конечные выводы обмотки статора и выводы обмотки ротора, подключают выводы одной фазы обмотки ротора к конечным выводам одной фазы обмотки статора, выводы обмотки ротора последующей фазы - к конечным выводам обмотки статора предыдущей фазы, выводы обмотки ротора предыдущей фазы - к конечным выводам обмотки статора последующей фазы, одновременно с подключением выводов обмотки ротора к конечным выводам обмотки статора уменьшают частоту и напряжение на выходе преобразователя частоты, причем частоту уменьшают до уровня, при котором частота вращения поля статора будет равна половине от порогового значения частоты вращения ротора, после втягивания двигателя в синхронизм для регулирования частоты вращения двигателя плавно изменяют сигналы задания уровня частоты и напряжения на входе преобразователя частоты.
| СПОСОБ РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ ДВИГАТЕЛЯ ДВОЙНОГО ПИТАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2076450C1 |
| Способ регулирования частоты вращения двигателя двойного питания | 1988 |
|
SU1621136A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ДВОЙНОГО ПИТАНИЯ | 2006 |
|
RU2320073C1 |
| СИСТЕМА УПРАВЛЕНИЯ МАШИНОЙ ДВОЙНОГО ПИТАНИЯ | 1995 |
|
RU2106055C1 |
| 0 |
|
SU351477A1 | |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ ВЕНТИЛЯТОРА ЭЛЕКТРОВОЗА ПЕРЕМЕННОГО ТОКА | 2005 |
|
RU2285329C1 |
| DE 1563267 A1, 03.06.1970 | |||
| GB 1290962 A, 27.09.1972 | |||
| US 3859578 A, 07.01.1975. | |||

