Изобретение относится к способу сканирования положения пути согласно признакам, приведенным в ограничительной части п.1 формулы, и к очистительной машине согласно признакам, приведенным в ограничительной части п.2 формулы.
Подобный способ известен из US 4574704. Поскольку за счет использования щебнеочистительной машины положение пути полностью нарушается, его восстановление после укладки очищенного щебня является проблематичным. Известный способ состоит в том, что за счет следующего за положением пути положения первой измерительной хорды, позиционированной по отношению к рабочему направлению перед щебнезахватным устройством, управляют последующей второй измерительной хордой. Для этого измеряют положение стрелки первой измерительной хорды и угол, который обе измерительные хорды заключают между собой. Путеподъемник перемещает путь в поперечном направлении до тех пор, пока задняя конечная точка второй измерительной хорды по достижении названного угла не попадет в заданное положение. Этот способ применим, однако, только на закруглении пути. Для переходных кривых необходимо учитывать поправочный коэффициент.
Задачей настоящего изобретения является создание способа и очистительной машины родового вида, с помощью которого и которой возможно осуществляемое без проблем, а также относительно просто и точно восстановление положения пути.
Согласно изобретению, эта задача решается посредством признаков, приведенных в отличительных частях пп.1 и 2 формулы.
С этими признаками возможно копирование без проблем положения пути для его восстановления после возврата очищенного щебня. При этом предпочтительным образом совершенно неважно, является ли собой участок пути частью закругления или переходной кривой.
Другие преимущества и выполнения изобретения приведены на чертеже.
Ниже изобретение более подробно описано на примере осуществления, изображенного на чертеже, на котором представляют:
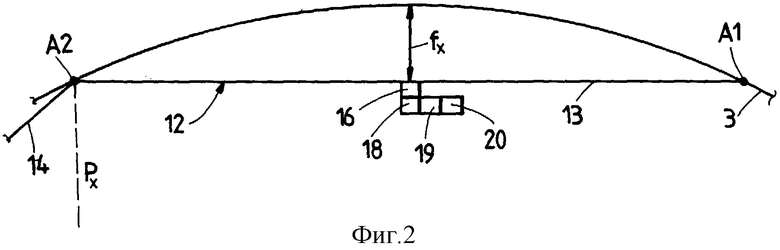
- фиг.1 - упрощенный вид сбоку очистительной машины;
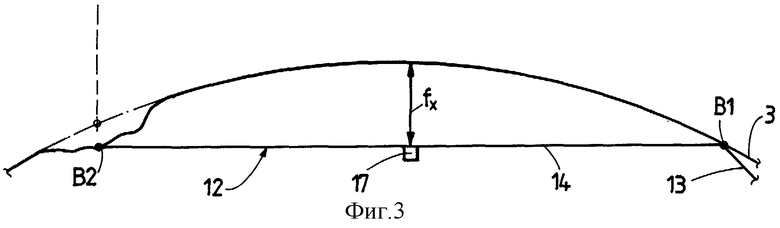
- фиг.2 и 3 - схематично путевую измерительную систему.
Как видно на фиг.1, очистительная машина 1 для очистки щебня 2 пути 3 состоит из выемочного вагона 4 и сочлененного с ним вагона 5 для грохочения. Последний оборудован установкой 6 грохочения для очистки щебня. Расположенный позади вагона 5 для грохочения по отношению к рабочему направлению 7 выемочный вагон 4 содержит пропущенное вокруг пути щебнезахватное устройство 8, которому придан первый путеподъемник 9. Перед задней, подробно не показанной, рельсовой ходовой тележкой 10 второй путеподъемник 9 соединен с рамой 11 машины, установленной с возможностью перемещения на рельсовых ходовых тележках 10.
Путевая измерительная система 12 состоит из первой по отношению к рабочему направлению 7 измерительной хорды 13 и последующей второй измерительной хорды 14, выполненных одинаковыми по длине. Каждая измерительная хорда 13, 14 (см. также фиг.2, 3) имеет переднюю конечную точку А1, В1 и заднюю конечную точку А2, В2 соответственно в виде проходящей на пути 3 измерительной оси 15. Задняя конечная точка В2 второй измерительной хорды 14 находится в зоне первого путеподъемника 9 и в зоне позиционированного под путем 3 участка щебнезахватного устройства 8. Посередине между обеими концевыми точками А1, В1 и А2, В2 обеих измерительных хорд 13, 14 расположены первый 16 и второй 17 датчики высоты стрелки. Задняя конечная точка А2 первой измерительной хорды 13 и передняя конечная точка В1 второй измерительной хорды 14 образованы общей измерительной осью 15. Как схематично показано на фиг.2 и 3, путевая измерительная система 12 содержит память 18, измеритель 19 пути для регистрации пройденного очистительной машиной 1 пути и компаратор 20.
Ниже способ сканирования положения пути описан более подробно.
Для регистрации фактического положения пути 3 его в рамках предварительного измерения непрерывно сканируют посредством первой измерительной хорды 13, записывая в память 18 высоту fx стрелки, зарегистрированную датчиком 16. Параллельно этому записывают в память путь, зарегистрированный измерителем 19 пути, для придания задней конечной точке А2 первой измерительной хорды 13 локальной точке Рх пути.
Как только в рамках рабочего прохождения очистительной машины локальная точка Рх пути будет достигнута задней конечной точкой В2 второй измерительной хорды 14, приданную этой точке пути во время предварительного измерения первой измерительной хордой 13 и записанную в память высоту fx стрелки подают к компаратору 20. Как видно на фиг.3, задняя конечная точка В2 не находится в заданном положении. За счет этого высота стрелки, зарегистрированная вторым датчиком 17 второй измерительной хорды 14, также не соответствует хранящемуся в памяти и установленному во время предварительного измерения измеренному значению.
С помощью путеподъемника 9 путь 3 смещают в поперечном направлении до тех пор, пока зарегистрированная вторым датчиком 17 высота стрелки не будет соответствовать имеющемуся в компараторе 20 опорному значению. Таким образом, задняя конечная точка В2 находится точно в заданном положении, зарегистрированном в рамках предварительного измерения первой измерительной хордой 13.
Простейшее решение состоит в выполнении обеих измерительных хорд 13, 14 с одинаковым по длине шагом. Если длина должна быть разной, то зарегистрированная в первом датчике 16 высота стрелки должна быть пересчитана в соответствии с геометрическими условиями.
Во избежание увода положения пути вследствие неточностей целесообразно вести также следующий за щебнезахватным устройством 8 второй путеподъемник 9. Для этого заданное положение пути 3 известным образом вычисляют в виде локальной картины по симметричным высотам стрелок первой измерительной хорды 13. В эту локальную картину путем расчета вводят соответственно положение выемочного вагона 4. По этому положению можно определить высоты стрелок рамы 11 машины в зоне второго путеподъемника 9. Это фактическое значение высоты стрелки сравнивают с вычисленной высотой стрелки. При наличии разности можно осуществлять соответствующим образом встречное управление вторым путеподъемником 9.
Изобретение относится к способу сканирования положения пути и к очистительной машине. Способ сканирования положения пути в рабочем направлении непосредственно перед щебнезахватным устройством и восстановления нарушенного им положения пути заключается в том, что в рабочем направлении на пути через соответственно две конечные точки ведут первую и вторую измерительные хорды. В зоне первой измерительной хорды измеряют высоту стрелки и заднюю конечную точку второй измерительной хорды смещают для корректировки положения пути в его поперечном направлении. При этом, согласно изобретению, высоту стрелки, измеренную первым датчиком высоты стрелки первой измерительной хорды, в сочетании с измерением пути записывают в память для регистрации задней конечной точки первой измерительной хорды в качестве заданного положения по отношению к локальной точке пути. Затем, по достижении локальной точки пути задней конечной точкой второй измерительной хорды эту конечную точку смещают до тех пор, пока за счет приданного второй измерительной хорде второго датчика высоты стрелки не будут достигнуты соответствующее хранящейся в памяти высоте стрелки измеренное значение и, тем самым, заданное положение. Очистительная машина для очистки щебня пути состоит из выемочного вагона, содержащего регулируемый по высоте путеподъемник и щебнезахватное устройство, и расположенного перед выемочным вагоном по отношению к рабочему направлению вагона для грохочения. Вагону для грохочения приданы первая измерительная хорда и датчик высоты стрелки, а выемочному вагону - вторая измерительная хорда путевой измерительной системы с задней по отношению к рабочему направлению конечной точкой. Второй измерительной хорде придан второй датчик высоты стрелки. Путевая измерительная система содержит измеритель пути и память для зависимого от пути хранения зарегистрированного первым датчиком высоты стрелки измеренного значения и для его сравнения с измеренным значением, зарегистрированным вторым датчиком высоты стрелки. В результате можно точно и просто осуществить восстановление пути после возврата на путь очищенного щебня. 2 н.п. ф-лы, 3 ил.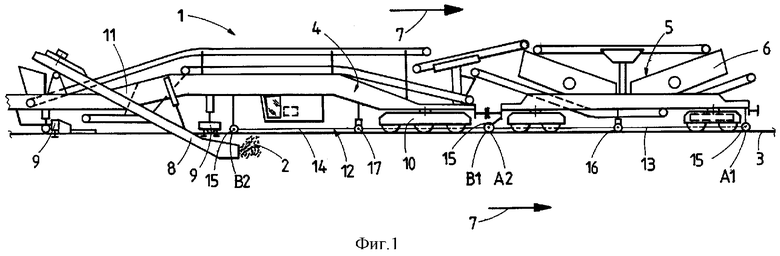
а) высоту (fx) стрелки, измеренную первым датчиком (16) высоты стрелки первой измерительной хорды (13), в сочетании с измерением пути записывают в память для регистрации задней конечной точки (А2) первой измерительной хорды (13) в качестве заданного положения по отношению к локальной точке (Рх) пути;
б) по достижении локальной точки (Рх) пути задней конечной точкой (В2) второй измерительной хорды (14) эту конечную точку (В2) смещают до тех пор, пока за счет приданного второй измерительной хорде (14) второго датчика (17) высоты стрелки не будут достигнуты соответствующее хранящейся в памяти высоте (fx) стрелки измеренное значение и, тем самым, заданное положение.
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| ПУТЕВАЯ МАШИНА С ЛАЗЕРНОЙ БАЗОВОЙ СИСТЕМОЙ И СПОСОБ ДЛЯ ВОССТАНОВЛЕНИЯ ПОЛОЖЕНИЯ РЕЛЬСОВОГО ПУТИ | 1998 |
|
RU2151231C1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |

