Изобретение относится к железнодорожному транспорту и предназначено для контроля и оценки фактического состояния элементов железнодорожного пути по условию их прочности по силам взаимодействия подвижного состава и железнодорожного пути.
Известен метод прямых измерений напряжений, усилий и деформаций, возникающих в верхнем строении пути под подвижным составом с помощью приборов, установленных непосредственно в пути (ГОСТ Р55050 - 2012) - аналог.
Недостатками этого метода является то, что он позволяет проводить измерения лишь на фиксированных и ограниченных по протяженности участках пути и применяется в основном для проведения сравнительной оценки новых единиц подвижного состава с известными в эксплуатации единицами подвижного состава, определения допустимого воздействия железнодорожного подвижного состава на железнодорожный путь для установления условий обращения по сети дорог, а также при сертификационных испытаниях.
Известен способ оценки состояния железнодорожного пути с использованием электронной вычислительной машины (ЭВМ) и измерительных устройств, смонтированных в путеизмерительном вагоне, заключающийся в том, что в процессе движения вагона при определенной скорости измеряют положение пути по уровню и в плане, ширину рельсовой колеи, электрические сигналы, пропорциональные величинам измеряемых параметров, подают на ЭВМ и сравнивают величины каждого измеряемого параметра с допустимыми, перед поездкой закладывают в ЭВМ математическую модель взаимодействия оцениваемого пути и экипажа при требуемой скорости его движения, одновременно с параметрами положения рельсовой колеи измеряют неровности на рабочей поверхности рельса, модуль упругости подрельсового основания и коэффициенты демпфирования и жесткости в сцеплениях вагонов, по введенным в ЭВМ величинам решают систему алгебраических и дифференциальных уравнений упомянутой математической модели, определяют перемещения элементов системы экипаж-путь, напряжения в элементах пути и их изменения во времени (Патент RU №2394120 С2, МПК: Е01В 35/00, опубл. 10.07.2010 г.) - аналог.
Недостатками указанного способа является недостаточная точность и надежность, обусловленные тем, что динамические силы в контактах колес и рельсов определяются с помощью математических моделей, которые не могут учитывать все параметры инфраструктуры пути.
Известен способ оценки состояния рельсового пути, заключающийся в том, что с применением диагностического вагона, оборудованного тензометрическими колесными парами, тензометрическими автосцепками, измерительными приборами, системами спутниковой навигации и беспроводной передачи данных, который устанавливают в состав грузового поезда, определяют состояние геометрии рельсового пути с привязкой к электронной GPS карте рельсового пути, и связывают их с данными последних проездов вагона-путеизмерителя. Одновременно с помощью тензометрических колесных пар проводят определение величин вертикальных и боковых сил, их соотношение во взаимодействии подвижного состава и рельсового пути, а также отдельного колеса с рельсом, а с помощью тензометрических автосцепок определяют продольно-динамические силы в подвижном составе. На основе результатов измерения геометрических параметров рельсового пути и скорости движения подвижного состава оценивают вероятность схода вследствие вкатывания гребня колеса на рельс. Определяют участки пути, на которых могут иметь место значения коэффициента запаса устойчивости против схода с рельсов ниже нормативных значений и вырабатывают рекомендации по текущему содержанию пути на таких участках (Патент RU №2513338 С1, МПК: В61К 9/08, опубл. 20.04.2014 г.) - прототип.
Недостатком известного решения является то, что оно не позволяет определять характеристики напряженно-деформированного состояния пути, определяющие прочность пути под груженым подвижным составом.
Техническим результатом, на достижение которого направлено заявляемое решение, является повышение точности и достоверности определения характеристик напряженно-деформированного состояния пути, определяющих прочность пути на эксплуатируемых участках сети дорог любой протяженности, при проследовании по нему диагностического вагона с нагрузкой на ось вплоть до максимально допустимой.
Указанный технический результат достигается для способа оценки напряженно-деформированного состояния пути, заключающегося в размещении в составе грузового поезда диагностического грузового вагона, оборудованного тензометрическими колесными парами, с помощью которых измеряют вертикальные и боковые силы, передающиеся от колес диагностического грузового вагона на рельсы, тем, что дополнительно перед поездкой в бортовую систему управления грузовым поездом вводят параметры пути, зависящие от конструкции верхнего строения оцениваемого пути, вертикальные и боковые силы измеряют для загруженного диагностического грузового вагона в диапазоне частот, определяемом с учетом спектра силовых составляющих возникающих в контакте колеса с рельсом при прохождении диагностического грузового поезда по длинным неровностям пути, коротким неровностям пути и неровностям на поверхности катания рельса, размещают в составе грузового поезда нагрузочное устройство, с помощью которого в реальном времени определяют модуль упругости пути, и по измеренным в движении величинам вертикальных и боковых сил, модуля упругости и введенным перед поездкой параметрам пути определяют характеристики напряженно-деформированного состояния пути под диагностическим грузовым вагоном на эксплуатируемых участках любой протяженности с привязкой к конкретным сечениям пути с помощью устройства GPS навигации.
Способ, характеризующийся тем, что диагностический грузовой вагон загружают до максимальной осевой нагрузки 23,5 т.
Способ, характеризующийся тем, что измеряют вертикальные и боковые силы, действующие от колеса на рельс, в диапазоне частот от 0 до 100 Гц.
Способ, характеризующийся тем, что измеряют вертикальные и боковые силы, действующие от колеса на рельс, при прохождении экипажа (состава) по длинным неровностям пути, образующимся из-за отклонений от проектных параметров пути в плане и продольном профиле длиной 25-4 м.
Способ, при котором измеряют вертикальные и боковые силы, действующие от колеса на рельс, при прохождении по коротким неровностям, возникающим в пути из-за неравноупругости подрельсового основания длиной 4-1 м.
Способ, при котором измеряют вертикальные и боковые силы, действующие от колеса на рельс, при прохождении по неровностям на поверхности катания рельса длиной 1-0,2 м.
Способ, характеризующийся тем, что измеряют боковые и горизонтальные силы, передающиеся на рельс от первой и второй осей первой по ходу движения тележки диагностического вагона.
Способ, при котором в качестве параметров пути, зависящих от конструкции верхнего строения оцениваемого пути выбирают инерционные, упругие и диссипативные свойства пути.
Способ, в котором в качестве нагрузочного устройства используют отдельный грузовой вагон, оборудованный блоком определения модуля упругости подрельсового основания железнодорожного пути.
Отличие заявляемого способа от известных решений заключается в том, что с помощью диагностического грузового вагона, оборудованного двумя тензометрическими колесными парами (ТКП), установленными под первую по ходу движения тележку нагруженного диагностического грузового вагона, определяют величины вертикальных и боковых сил, действующих от колеса на рельс. С помощью нагрузочного устройства, оборудованного, например, на базе отдельного грузового вагона, определяют модуль упругости подрельсового основания железнодорожного пути. С помощью системы спутниковой навигации GPS осуществляют привязку измеренных вертикальных, боковых сил и модуля упругости железнодорожного пути к конкретным участкам по протяженности пути. Используя физические и математические соотношения между измеренными вертикальными и боковыми силами, действующими от колеса на рельс, и расчетными характеристиками пути с учетом фактического модуля упругости определяют основные характеристики напряженно-деформированного состояния пути, определяющие прочность пути, под диагностическим грузовым вагоном, т.е. определение характеристик напряженно-деформированного состояния пути, определяющих прочность железнодорожного пути, проводится по фактически измеренным с помощью тензометрических колесных пар вертикальным и боковым силам, действующим от колеса на рельс, и фактическому модулю упругости пути, измеренному с помощью нагрузочного устройства, при проследовании по эксплуатируемым участкам сети с привязкой к конкретным сечениям пути в реальном времени.
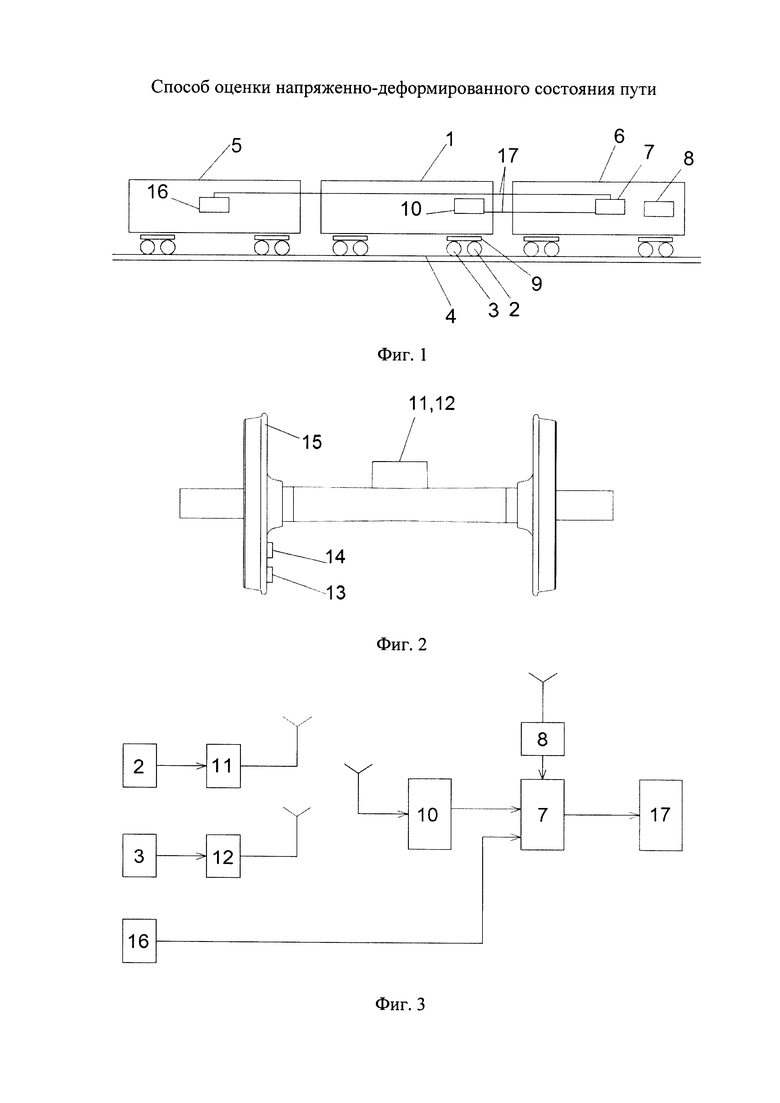
Заявляемое решение конкретизировано на фиг. 1-3, где на фиг. 1 представлена схема устройства (состава), реализующего заявляемый способ, на фиг. 2 - оси тензометрических колесных пар с размещенным на них оборудованием, а на фиг. 3 - представлена блок-схема операций непрерывной автоматизированной оценки напряженно-деформированного состояния пути.
Для реализации предлагаемого способа формируется состав (опытный поезд), состоящий из диагностического грузового вагона 1, оборудованного тензометрическими колесными парами 2 (ТКП 1), 3 (ТКП 2) для измерения вертикальных и боковых сил, передающихся от колеса на рельс 4, нагрузочного устройства 5 для определения в реальном времени при движении поезда модуля упругости пути. Состав содержит бортовую систему управления, выполненную, например, в виде электронно-вычислительной машины (ЭВМ) 7 для выполнения вычислительных операций и приемное устройство GPS сигналов для привязки к электронной карте рельсового пути 8, которые могут располагаться, например, в вагоне-лаборатории 6 или в другом месте состава с обеспечением их взаимодействия с нагрузочным устройством 5 и диагностическим грузовым вагоном 1. При описании реализации способа принят один из возможных вариантов размещения элементов 7 и 8 в составе поезда - вагон-лаборатория.
В качестве диагностического грузового вагона 1 используется грузовой вагон с максимальной на сегодняшний день допустимой нагрузкой на ось 23,5 тонны (когда вагон загружен максимально), оборудованный двумя тензометрическими колесными парами 2, 3 для измерения вертикальных и боковых сил, передающихся на рельс 4 от первой и второй осей первой по ходу движения тележки 9 в зависимости от уровня загрузки (нагрузки) диагностического грузового вагона, и блоком приема 10 сигналов с вращающихся тензометрических колесных пар по радиоканалу. Каждая из тензометрических колесных пар 2, 3 выполнены на базе типовой колесной пары. На оси тензометрических колесных пар (фиг. 2) установлены электронные блоки 11, 12, в которых смонтированы тензометрические усилители, аккумуляторные батареи, контроллеры и передатчики, которые преобразовывают механические деформации тензорезисторов 13, 14 измерительных схем, размещенных на диске колеса 15, в электрические сигналы, выполняют предварительную обработку и передачу данных по радиоканалу с электронных блоков 11, 12 на блок приема 10, установленный на раме диагностического грузового вагона 1. Нагрузочное устройство 5 оборудовано блоком 16 определения модуля упругости пути в движении и может быть выполнено, например, на базе отдельного грузового вагона. Вагон-лаборатория 6 может быть выполнена на базе цельнометаллического пассажирского вагона. Бортовая ЭВМ 7 связана кабельными линиями 17 с блоком приема сигналов 10, расположенного на диагностическом грузовом вагоне 1 и блоком определения модуля упругости пути 16, расположенного на нагрузочном устройстве 5.
Заявляемый способ оценки напряженно-деформированного состояния пути заключается в том, что при движении по исследуемым участкам пути с помощью тензометрических колесных пар 2, 3 проводятся измерения вертикальных и боковых сил, действующих от колесных пар первой по ходу движения тележки 9 диагностического грузового вагона 1 на путь с привязкой к конкретным сечениям пути. Тензометрические колесные пары позволяют проводить измерения вертикальных и боковых сил, действующих от колеса на рельс, в различных диапазонах частот. Например, в диапазоне частот от 0 до 100 Гц учитывается весь диапазон силовых составляющих, возникающих в контакте колеса с рельсом при прохождении экипажа по длинным неровностям пути, образующимися из-за отклонений от проектных параметров пути в плане и продольном профиле, длина которых составляет 25-4 м, коротким неровностям пути, возникающим из-за неравноупругости подрельсового основания с длиной 4-1 м и неровностям на поверхности катания рельса с длиной 1-0,1 м. В случае, если длины неровностей пути будут отличаться от приведенных выше значений, то и диапазон частот будет иным. Одновременно с помощью нагрузочного устройства 5 проводятся измерения фактических значений модуля упругости пути. Измеряемые процессы привязываются к конкретным сечениям пути с помощью устройства GPS навигации 8. Перед поездкой по исследуемому участку пути в бортовую ЭВМ 7 вводят данные, например, об инерционных, упругих и диссипативных свойствах пути, зависящие от конкретной конструкции верхнего строения пути, а также расстояние между осями тензометрических колесных пар в тележке.
Определение характеристик напряженно-деформированного состояния пути с привязкой к конкретным сечениям пути проводится в автоматическом режиме под каждой тензометрической колесной парой (ТКП). На фиг. 3 представлена блок-схема операций непрерывной автоматизированной оценки напряженно-деформированного состояния пути. При этом на фиг. 3: 2 - тензометрическая колесная пара ТКП 1; 3 - тензометрическая колесная пара ТКП 2, 11 - электронный блоки измерения вертикальных и боковых сил ТКП 1; 12 - электронный блоки измерения вертикальных и боковых сил ТКП 2; 10 - блок приема сигналов сил с тензометрических колесных пар; 16 - блок измерения модуля упругости пути; 7 - бортовая электронно-вычислительная машина ЭВМ; 8 - блок привязки к GPS карте рельсового пути; 17 - блок регистрации и печати характеристик напряженно-деформированного состояния пути.
При движении опытного поезда (состава) сигналы от тензорезисторов 13, 14, размещенных на диске тензометрической колесной пары 15, поступают на измерительные блоки 11, 12, с измерительных блоков по радиоканалу сигналы передаются на блок приема 10, с блока 10 по кабельным линиям 17 сигналы поступают на вход ЭВМ 7. Кроме того, на ЭВМ по кабельным линиям 17 передаются данные с блока измерения модуля упругости пути 16 нагрузочного устройства 5. Одновременно на ЭВМ 7 поступают сигналы привязки к GPS карте рельсового пути. Используя в качестве входных данных величины вертикальных и боковых сил, действующих от колеса на рельс, поступающих с тензометрических колесных пар 2, 3, фактического модуля упругости пути, измеренного с помощью нагрузочного устройства 5, данных о конструкции пути, заложенных в ЭВМ 7 с привязкой к GPS карте рельсового пути, определяют характеристики напряженно-деформированного состояния пути, которые регистрируются в блоке 18 и выдаются на печать. Скорость движения определяется автоматически по сигналам с измерительных схем тензометрических колесных пар.
Выходными параметрами системы являются основные характеристики напряженно-деформированного состояния пути, определяющие прочность пути под груженым диагностическим вагоном с максимальной допустимой нагрузкой на ось и привязкой к конкретным участкам. Такими характеристиками являются, например: отжатия головки рельса, сдвиг подошвы рельса, напряжения соответственно во внешней и внутренней выкружке головки рельса, напряжения соответственно во внешней и внутренней кромке подошвы рельса, вертикальные прогибы рельса, ускорение рельса, вертикальные прогибы шпал, ускорения шпал, напряжения в балласте, напряжения смятия шпал подкладками, напряжения на основной площадке земляного полотна на выбранных участках пути любой протяженности. Все выходные параметры регистрируются и выдаются в печатном виде блоком 18.
Максимальные значения напряжений и деформаций пути, полученные по результатам измерений сил, действующих от колеса на рельсы, полученных с помощью ТКП, сравниваются с максимальными допустимыми значениями, установленными нормативными документами ОАО РЖД, и используются для определения допускаемых скоростей движения грузовых вагонов с максимальной допустимой осевой нагрузкой 23,5 т при проследовании по исследуемым участкам пути, определения максимального веса поезда и рациональных режимов его ведения, оценки накопления остаточных деформаций верхнего строения пути с целью определения видов и сроков проведения ремонта пути.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ оценки напряженно-деформированного состояния железнодорожного пути в условиях Крайнего Севера и Сибири | 2022 |
|
RU2795351C1 |
| СПОСОБ ОЦЕНКИ СОСТОЯНИЯ РЕЛЬСОВОГО ПУТИ | 2012 |
|
RU2513338C1 |
| Устройство оценки и контроля динамического состояния верхнего строения пути в условиях интенсификации перевозочных процессов | 2020 |
|
RU2757941C1 |
| СПОСОБ ОЦЕНКИ СОСТОЯНИЯ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2008 |
|
RU2394120C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВЕРТИКАЛЬНЫХ И БОКОВЫХ СИЛ ВЗАИМОДЕЙСТВИЯ МЕЖДУ КОЛЕСОМ И РЕЛЬСОМ | 2015 |
|
RU2591739C1 |
| Способ оценки состояния железнодорожного пути с использованием электронной вычислительной машины (эвм) и измерительных устройств,смонтированых в путеизмерительном вагоне | 1976 |
|
SU618476A1 |
| ПОСТ КОМПЛЕКСНОГО КОНТРОЛЯ ДЕФЕКТОВ БУКСОВЫХ УЗЛОВ И КОЛЕС ДВИЖУЩИХСЯ ВАГОНОВ | 2014 |
|
RU2578005C1 |
| Способ мониторинга технического состояния железнодорожного пути и устройство для его осуществления | 2021 |
|
RU2780704C2 |
| Устройство сбора информации и способ оценки результатов взаимодействия между колесом и рельсом | 2017 |
|
RU2682567C1 |
| Способ тензометрического контроля поверхности катания колес железнодорожных вагонов | 2023 |
|
RU2803609C1 |
Изобретение относится к железнодорожному транспорту и предназначено для контроля и оценки фактического состояния элементов железнодорожного пути по условию их прочности по силам взаимодействия подвижного состава и железнодорожного пути. В составе грузового поезда размещают диагностический грузовой вагон, оборудованный тензометрическими колесными парами, с помощью которых измеряют вертикальные и боковые силы, передающиеся от колес диагностического грузового вагона на рельсы. Дополнительно перед поездкой в бортовую систему управления грузовым поездом вводят параметры пути, зависящие от конструкции верхнего строения оцениваемого пути. Вертикальные и боковые силы измеряют для загруженного диагностического грузового вагона в диапазоне частот, определяемом с учетом спектра силовых составляющих, возникающих в контакте колеса с рельсом при прохождении диагностического грузового поезда по длинным неровностям пути, коротким неровностям пути и неровностям на поверхности катания рельса. Размещают в составе грузового поезда нагрузочное устройство, с помощью которого в реальном времени определяют модуль упругости пути. По измеренным в движении величинам вертикальных и боковых сил, модуля упругости и введенным перед поездкой параметрам пути определяют характеристики напряженно-деформированного состояния пути под диагностическим грузовым вагоном на эксплуатируемых участках любой протяженности с привязкой к конкретным сечениям пути с помощью устройства GPS навигации. В результате повышается точность и достоверность определения характеристик напряженно-деформированного состояния пути. 8 з.п. ф-лы, 3 ил.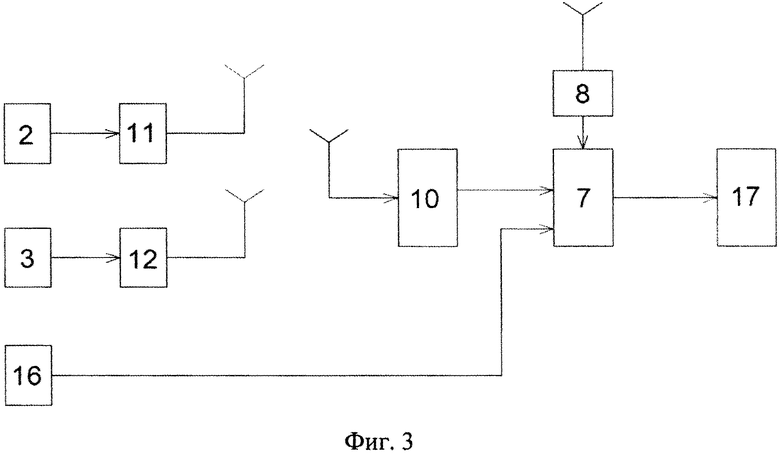
1. Способ оценки напряженно-деформированного состояния пути, заключающийся в том, что в составе грузового поезда размещают диагностический грузовой вагон, оборудованный тензометрическими колесными парами, с помощью которых измеряют вертикальные и боковые силы, передающиеся от колес диагностического грузового вагона на рельсы, отличающийся тем, что перед поездкой в бортовую систему управления грузовым поездом вводят параметры пути, зависящие от конструкции верхнего строения оцениваемого пути, вертикальные и боковые силы измеряют для загруженного диагностического грузового вагона в диапазоне частот, определяемом с учетом спектра силовых составляющих, возникающих в контакте колеса с рельсом при прохождении диагностического грузового поезда по длинным неровностям пути, коротким неровностям пути и неровностям на поверхности катания рельса, размещают в составе грузового поезда нагрузочное устройство, с помощью которого в реальном времени определяют модуль упругости пути, и по измеренным в движении величинам вертикальных и боковых сил, модуля упругости и введенным перед поездкой параметрам пути определяют характеристики напряженно-деформированного состояния пути под диагностическим вагоном на эксплуатируемых участках любой протяженности с привязкой к конкретным сечениям пути с помощью устройства GPS навигации.
2. Способ по п.1, отличающийся тем, что диагностический вагон загружают до максимальной осевой нагрузки 23,5 т.
3. Способ по п.1, отличающийся тем, что измеряют вертикальные и боковые силы, действующие от колеса на рельс, в диапазоне частот от 0 до 100 Гц.
4. Способ по п.1, отличающийся тем, что измеряют вертикальные и боковые силы, действующие от колеса на рельс, при прохождении экипажа по длинным неровностям пути, образующимся из-за отклонений от проектных параметров пути в плане и продольном профиле длиной 25-4 м.
5. Способ по п.1, отличающийся тем, что измеряют вертикальные и боковые силы, действующие от колеса на рельс, при прохождении по коротким неровностям, возникающим в пути из-за неравноупругости подрельсового основания длиной 4-1 м.
6. Способ по п.1, отличающийся тем, что измеряют вертикальные и боковые силы, действующие от колеса на рельс, при прохождении по неровностям на поверхности катания рельса длиной 1-0,2 м.
7. Способ по п.1, отличающийся тем, что измеряют боковые и горизонтальные силы, передающиеся на рельс от первой и второй осей первой по ходу движения тележки диагностического вагона.
8. Способ по п.1, отличающийся тем, что в качестве параметров пути, зависящих от конструкции верхнего строения оцениваемого пути, выбирают инерционные, упругие и диссипативные свойства пути.
9. Способ по п.1, отличающийся тем, что в качестве нагрузочного устройства используют отдельный грузовой вагон, оборудованный блоком определения модуля упругости подрельсового основания железнодорожного пути.
| СПОСОБ ОЦЕНКИ СОСТОЯНИЯ РЕЛЬСОВОГО ПУТИ | 2012 |
|
RU2513338C1 |
| СПОСОБ ОЦЕНКИ СОСТОЯНИЯ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2008 |
|
RU2394120C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТА ОТНОСИТЕЛЬНОЙ ЖЕСТКОСТИ ОСНОВАНИЯ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ И РЕЛЬСА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1996 |
|
RU2116400C1 |
| Автомобиль-сани, движущиеся на полозьях посредством устанавливающихся по высоте колес с шинами | 1924 |
|
SU2017A1 |
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |

