Область техники, к которой относится изобретение
Настоящее изобретение в целом относится к способу для инициирования и регулярного обновления устройства накопления паразитного эхо-сигнала измерителя уровня заполнения, например ультразвукового или радарного измерителя уровня заполнения, который работает в соответствии со способом рабочего цикла. В частности, изобретение относится к способу обновления накопителя паразитных эхо-сигналов, в этом способе эхо-сигналы из кривых эхо-сигналов различных периодов проверяются и группируются в зависимости от соответствующих характерных количественных параметров, и в этом способе впоследствии устройство накопления паразитного эхо-сигнала обновляется согласно оценке сгруппированных эхо-сигналов.
Кроме того, изобретение относится к устройству оценки для выполнения описанного способа согласно изобретению, в частности для обновления накопителя паразитного эхо-сигнала, в этом способе устройство оценки проверяет и группирует эхо-сигналы из кривых эхо-сигналов различных периодов в зависимости от соответствующих характеристических величин отдельных эхо-сигналов, и в котором оценивающий узел впоследствии обновляет устройство накопления паразитного эхо-сигнала путем оценки сгруппированных эхо-сигналов.
Кроме того, изобретение относится к компьютерной программе для реализации способа согласно изобретению в измерителе уровня заполнения или в устройстве оценки согласно изобретению, а также к соответствующему компьютерному программному продукту. Такой компьютерный программный продукт может быть машиночитаемым носителем, например CD-ROM (постоянным запоминающим носителем на компакт-диске), дискетой или съемным жестким диском, либо компьютерной программой, которая может быть загружена сервером.
В контексте настоящего изобретения термин «эхо-сигнал» в целом указывает на диапазон около локального максимума на огибающей кривой уровня заполнения, этот диапазон превышает свободно выбираемое пороговое значение. Термин «характеристики эхо-сигнала» или «данные эхо-сигнала» указывает на данные, выработанные аналого-цифровым преобразователем посредством сканирования огибающей кривой уровня заполнения, например содержащие измерения положения, времени, амплитуды или давления (упомянуты только немногие), эти данные представляют отдельные эхо-сигналы огибающей кривой уровня заполнения в дискретные моменты времени.
В контексте настоящего изобретения термин «измерители уровня заполнения, работающие в соответствии со способом рабочего цикла» охватывает ультразвуковые измерители уровня заполнения и радарные измерители уровня заполнения, при этом конкретные измерители уровня заполнения, которые работают в соответствии со способом импульсного рабочего цикла, и измерители уровня заполнения, которые работают в соответствии с FMCW-способом, составляют часть радарных измерителей уровня заполнения. Кроме того, в контексте настоящего изобретения термин «измерители уровня заполнения, основанные на рабочем цикле» также включает в себя устройства, которые работают согласно принципу управляемых микроволн, а также другие устройства, которые сканируют отраженный эхо-сигнал, другими словами, которые вырабатывают огибающую кривую уровня заполнения.
Уровень техники
Измерители уровня заполнения, которые работают согласно способу импульсного рабочего цикла, которые сканируют отраженный эхо-сигнал, вырабатывают множество информации для каждого эхо-сигнала в огибающей кривой уровня заполнения вне сканируемого эхо-сигнала. Действие по выработке огибающей кривой из принятых эхо-сигналов достаточно известно, поэтому эта технология не требует дальнейших объяснений (например, см. DE 44 07 369 C2; M. Skolnik, «Introduction to Radar Systems», 2nd edition, 1980, McGraw-Hill (М. Скольник, «Введение в радиолокационные системы», издание 2-е, 1980 г.); заголовок: Peter Devine, «Radar level measurement - the users guide», VEGA Controlls Ltd., 2000, ISBN 0-9538920-0-X (Петер Девин «Радиолокационное измерение уровня - руководство пользователя»)).
В датчиках уровня заполнения, работающих согласно способу импульсного рабочего цикла, короткие электромагнитные или акустические импульсы испускаются в направлении поверхности сыпучего материала. Впоследствии датчик записывает эхо-сигналы, отраженные сыпучим материалом и встроенными в контейнер крепежными элементами, и из этого извлекает ожидаемый уровень заполнения, принимая во внимание скорость распространения импульса.
В этом способе уровень заполнения определяется из отдельного эхо-сигнала, который может быть выявлен на огибающей кривой уровня заполнения в качестве характерного уровня заполнения. В приспособлении огибающая кривая уровня заполнения сканируется аналого-цифровым преобразователем, в результате чего принятая огибающая кривая уровня заполнения предоставляется микропроцессору или микроконтроллеру в цифровом виде для дальнейшей обработки. Однако принятая огибающая кривая уровня заполнения содержит не только эхо-сигнал уровня заполнения, который является характерным для существующего уровня заполнения и который в настоящем документе указан как полезный эхо-сигнал, но к тому же часто содержит паразитные эхо-сигналы, которые вызваны, например, множественными отражениями или отражениями от встроенных в контейнер крепежных элементов.
Для того, чтобы выявить только действительный эхо-сигнал уровня заполнения как таковой на такой огибающей кривой уровня заполнения или, точнее, отфильтровать любые нежелательные отражения помех, часто становится необходимой предварительная обработка огибающей кривой уровня заполнения. В этой предварительной обработке огибающей кривой уровня заполнения эхо-сигналы обрабатываются способами одномерной или многомерной обработки сигнала, например способами обработки изображений, такими как фильтрация, усреднение, выборка и классификация. Огибающая кривая уровня заполнения, подготовленная таким путем, затем проверяется и исследуется на эхо-сигналы, которые характерны для сыпучего материала, или, точнее, проверяется и исследуется отражение помех, и анализируется. Посредством эхо-сигналов, которые были подготовлены таким путем и которые содержат, например, данные относительно положения, амплитуды и длительности эхо-сигналов, может быть принято решение о том, какой эхо-сигнал является характеризующим истинный уровень заполнения, а какой эхо-сигнал - нет. Если эхо-сигнал выявлен в качестве являющегося характеризующим настоящий уровень заполнения, то положение анализируемого эхо-сигнала соответствует искомому значению уровня заполнения.
Поскольку, как уже было объяснено, любая полученная огибающая кривая уровня заполнения всегда может также содержать паразитные эхо-сигналы, эти паразитные эхо-сигналы должны быть безошибочно обнаружены, чтобы предотвратить ошибочное определение уровня заполнения по такому эхо-сигналу. Известный критерий для оценки того, является какой-либо эхо-сигнал эхо-сигналом уровня заполнения или паразитным эхо-сигналом, состоит в неизменном использовании эхо-сигнала с наивысшей амплитудой в качестве эхо-сигнала уровня заполнения. Тем не менее, этот критерий должен быть оценен как относительно ненадежный, поскольку, например, источник помех на пути распространения сигнала, который расположен ближе к приемнику измерителя уровня заполнения, чем действительный уровень заполнения, как правило, будет возвращать более сильный эхо-сигнал, чем сам уровень заполнения. Следовательно, этот критерий не следует использовать сам по себе, но всегда в комбинации с другими условиями.
Из DE 42 23 346 Al известны устройство и способ бесконтактного дистанционного измерения с использованием импульсных эхо-сигналов. Это устройство сравнивает импульсный эхо-сигнал для более точного определения времен прохода сигнала с образцами сигналов, хранящимися в нейронной сети. Целью, в частности, является точно определить время прохода сигнала даже в тех случаях, когда сильные паразитные эхо-сигналы накладываются на импульсный эхо-сигнал. С использованием технологий параллельной обработки данных и ассоциативного сравнения принятых сигналов с изученными образцами, которые сохранены в нейронной сети, возможно восстановить скрытую информацию и, таким образом, определить правильные данные уровня заполнения. С использованием нейронной ассоциативной обработки сигнала возможна комплексная целостная оценка профиля импульсного эхо-сигнала. В этой технологии измеренное расстояние само по себе может использоваться в качестве внутреннего опорного элемента, в котором значения компенсации извлекаются из существующих паразитных эхо-сигналов.
Кроме того, из DE 42 34 300 Al известен способ измерения уровня заполнения для прямого определения полезного эхо-сигнала без использования устройства накопления паразитного эхо-сигнала, в этом способе записывается временной сдвиг полезного эхо-сигнала, причем временной сдвиг вызван изменением времени прохождения сигнала, происходящего во время заполнения или опорожнения контейнера, и этот критерий оценивается, с тем чтобы сделать возможным проведение различия между полезным эхо-сигналом и паразитными эхо-сигналами. Другими словами, в этом способе в целях проведения различия между полезным эхо-сигналом и паразитным эхо-сигналом проводится проверка, содержат ли последующие сигналы импульсы эхо-сигнала, которые непрерывно сдвигаются во времени. Такой непрерывно сдвигающийся эхо-сигнал, который обнаружен наиболее близко, затем идентифицируется как полезный эхо-сигнал. Лежащая в основе известного способа идея состоит в том, что при отражении от внутренних стенок контейнера время прохождения сигнала стабильно, так что позиция таких шумовых импульсов неизменна даже при повторяющихся считываниях в последовательности приема. Однако обычно эта временная позиционная стабильность в профиле приема применяется к полезному эхо-сигналу, отраженному прямо от верхней поверхности сыпучего материала.
Другие способы определения уровня заполнения используют соотношения эхо-сигнала, принятые в прошлом, сравнивают их по отдельности с эхо-сигналами принятой в настоящий момент огибающей кривой уровня заполнения. В этих способах принятые эхо-сигналы уже принятой огибающей кривой уровня заполнения архивируются в запоминающем устройстве, с тем чтобы эти эхо-сигналы впоследствии могли быть по отдельности сравнены с данными из последующей огибающей кривой уровня заполнения. Например, из EP 0 689 679 Bl известен способ, который соотносит, после формирования значения разницы, принятые в настоящий момент эхо-сигналы с эхо-сигналами, уже принятыми в прошлом, и из этого, с использованием модуля нечеткой оценки, вычисляет вероятность, с которой эхо-сигнал является эхо-сигналом уровня заполнения. Этот подход ассоциирован с затруднениями не только потому, что этот способ подходит только для отфильтровывания множественных эхо-сигналов, но и потому, что способ, раскрытый в EP 0 689 679 Bl, делает возможным сравнение эхо-сигналов только в два момента времени. Более того, например, из DE 33 37 690 известен способ, в котором, во время фазы обучения, позиции паразитных эхо-сигналов могут быть сохранены вручную в накопителе датчика. Регулировка этого накопителя паразитных эхо-сигналов может происходить посредством измерения уровня заполнения пустого контейнера или ручным вводом пользователем дискретных позиций паразитного эхо-сигнала. После завершения фазы обучения, эхо-сигналы, принятые в кривой, сравниваются с записями в накопителе паразитных эхо-сигналов. Впоследствии программное обеспечение датчика больше не рассматривает известные паразитные эхо-сигналы в качестве возможных полезных эхо-сигналов.
Кроме того, из US 5 157 639 известен способ, который в соответствии с классифицированием существующих эхо-сигналов на полезные эхо-сигналы и паразитные эхо-сигналы сохраняет в устройстве накопления датчика информацию, определенную относительно паразитных эхо-сигналов. В описанной там процедуре либо ближайший эхо-сигнал, либо эхо-сигнал с наибольшей амплитудой объявляется полезным эхо-сигналом. Все другие эхо-сигналы, обнаруженные на кривой эхо-сигнала, считаются, таким образом, паразитными эхо-сигналами и сохраняются в устройстве накопления паразитного эхо-сигнала.
Вышеупомянутые способы разделяет общий показатель, по которому они имеют определенные недостатки относительно их практической применимости. Например, классический накопитель паразитного эхо-сигнала, описанный в DE 33 37 690, требует цикла обучения, инициированного пользователем. При практическом применении пользователь, таким образом, вынужден вручную вводить информацию, относящуюся к паразитным эхо-сигналам, возвращаемым контейнером, или, по меньшей мере, вынужден инициировать цикл самообучения, когда контейнер пуст.
В отличие от этого, способ для автоматического накопления паразитного эхо-сигнала, представленный в US 5 157 639, не имеет возможности выполнять надежное классифицирование на полезные эхо-сигналы и паразитные эхо-сигналы. Из практического применения известны конфигурации, в которых относительно большой источник помех присутствует прямо перед антенной датчика, из-за чего описанный способ не мог бы достичь пределов своих характеристик. Более того, представленный способ не предоставляет информацию относительно того, когда какой критерий должен быть использован при классифицировании существующих эхо-сигналов на полезные эхо-сигналы или паразитные эхо-сигналы.
Существует дополнительная проблема в том, что при сравнении вновь принятых эхо-сигналов с уже накопленными эхо-сигналами огибающей кривой уровня заполнения часто возникают проблемы локализации из-за того, что принятые в настоящее время эхо-сигналы могут изменяться со временем, несмотря на то, что они всегда вызваны тем же местом отражения в контейнере. Такие проблемы возникают, например, из-за пылеобразования во время заполнения или из-за последующего понижения сыпучего материала во время процесса опорожнения насыпных контейнеров.
Однако для того чтобы гарантировать надежное измерение уровня заполнения, уровню заполнения, который был распознан, необходимо быть снова и снова распознанным на основе принятых в настоящий момент эхо-сигналов, точнее, чем шумовое отражение, поошибке оцениваемое в качестве являющегося представляющим уровень заполнения. Например, если эхо-сигнал уровня заполнения временно не может быть получен, это должно быть обнаружено для того, чтобы исключить любые распределения, в которых, например, паразитный эхо-сигнал идентифицирован как эхо-сигнал уровня заполнения. Это зачастую проблематичное распределение эхо-сигналов из прошлых огибающих кривых уровня заполнения по данным настоящих огибающих кривых уровня заполнения обычно происходит в тех данных настоящих эхо-сигналов, которые сравниваются с данными уже принятых эхо-сигналов. Если в таком сравнении, например, с использованием поиска порогового значения кривой или максимума, настоящий эхо-сигнал соответствует уже принятому эхо-сигналу, допускается, что эти эхо-сигналы соответствуют друг другу, в результате чего новый эхо-сигнал идентифицируется как полезный эхо-сигнал. Если количество принятых эхо-сигналов в уже принятой огибающей кривой уровня заполнения отличается от количества настоящих эхо-сигналов, тогда существует опасность возникновения ошибки распределения. Также существует опасность несовпадающего распределения, если несколько эхо-сигналов встречаются в узком диапазоне.
Обратная связь накопителя паразитного эхо-сигнала с сигнальной обработкой сама по себе составляет основную проблему в полностью автоматическом накоплении паразитного эхо-сигнала. Если датчик неверно сохранил настоящий уровень заполнения как паразитный эхо-сигнал, впоследствии выполняющимся алгоритмам классификации будет невозможно идентифицировать правильный уровень заполнения. В случае использования статического накопителя паразитных эхо-сигналов всегда сталкиваются с проблемами, если паразитные эхо-сигналы возникают по-новому, например в результате прилипания сыпучего материала к стенкам контейнера, или если исчезли ранее известные паразитные эхо-сигналы, например из-за отпадания налипания. До настоящего времени известные способы оценки эхо-сигнала с использованием устройства накопления паразитного эхо-сигнала не допускают добавление вновь созданных паразитных эхо-сигналов и не допускают удаление исчезнувших паразитных эхо-сигналов из устройства накопления паразитного эхо-сигнала.
В случае статических соотношений уровня заполнения те способы, которые не используют устройство накопления паразитного эхо-сигнала (например, способ, описанный в DE 42 34 300 Al), для того чтобы выполнить классифицирование на полезные эхо-сигналы и паразитные эхо-сигналы в соединении с прямым анализом перемещений эхо-сигнала, не способны классифицировать существующие эхо-сигналы на полезные эхо-сигналы и паразитные эхо-сигналы. Таким образом, преимущества подобных алгоритмов ограничиваются периодами времени, в течение которых контейнер, который должен быть обмерен, является заполненным или опорожненным.
Сущность изобретения
Исходя из проблем, ассоциируемых с вышеописанными способами, задачей настоящего изобретения является создание способа или других вариантов для преодоления вышеупомянутых недостатков известных до настоящего времени способов для накопления паразитного эхо-сигнала. В частности, должен быть предоставлен вариант, который делает возможным автоматически и независимо инициализировать устройство накопления паразитного эхо-сигнала измерителя уровня заполнения, работающего в соответствии со способом рабочего импульсного цикла, такого как, например, радарный измеритель уровня заполнения или ультразвуковой измеритель уровня заполнения, и выполнять динамическое обновление устройства накопления паразитного эхо-сигнала.
Согласно первому аспекту настоящего изобретения эта задача удовлетворяется способом для динамического обновления устройства накопления паразитного эхо-сигнала измерителя уровня заполнения, работающего согласно способу рабочего цикла, в этом способе устройство накопления паразитного эхо-сигнала обновляют данными паразитного эхо-сигнала, когда предварительно, в течение параметризуемого периода времени, полезный эхо-сигнал (истинный эхо-сигнал) был идентифицирован как таковой в результате динамического характера изменения положения характеристик эхо-сигнала, причем паразитные эхо-сигналы (ложные эхо-сигналы), распознанные в результате статического характера изменения их типичных характеристик за тот же период времени, используют для обновления устройства накопления паразитного эхо-сигнала.
Согласно дополнительному аспекту задача изобретения решается измерителем уровня заполнения, работающим согласно способу рабочего цикла с блоком оценки, причем измеритель уровня заполнения затем обновляет устройство накопления паразитного эхо-сигнала данными паразитного эхо-сигнала, когда предварительно, с использованием блока оценки в течение параметризуемого периода времени, полезный эхо-сигнал был идентифицирован как таковой в результате динамического характера изменения положения типичных характеристик эхо-сигнала, причем измеритель уровня заполнения использует паразитные эхо-сигналы, распознаваемые в результате статического характера изменения их типичных характеристик за тот же период времени, для обновления устройства накопления паразитного эхо-сигнала.
Согласно третьему аспекту изобретения задача изобретения решается также за счет устройства оценки для динамического обновления устройства накопления паразитного эхо-сигнала измерителя уровня заполнения, работающего согласно способу рабочего цикла, в котором блок оценки обновляет устройство накопления паразитного эхо-сигнала данными паразитного эхо-сигнала, когда предварительно, в течение параметризуемого периода времени, полезный эхо-сигнал был идентифицирован как таковой в результате динамического характера изменения положения типичных характеристик эхо-сигнала, причем упомянутое устройство оценки использует паразитные эхо-сигналы, распознаваемые в результате статического характера изменения их типичных характеристик за тот же период времени, для обновления устройства накопления паразитного эхо-сигнала.
Кроме того, компьютерная программа, а также соответствующий компьютерный программный продукт для динамического обновления устройства накопления паразитного эхо-сигнала измерителя уровня заполнения, работающего согласно способу рабочего цикла, могут быть приведены в соответствие с вышеупомянутой задачей изобретения, причем компьютерная программа содержит инструкции, которые идентифицируют паразитные эхо-сигналы как таковые в результате статического характера изменения их типичных характеристик с тем, чтобы впоследствии обновлять устройство накопления паразитного эхо-сигнала соответствующими данными паразитного эхо-сигнала. В частности, компьютерная программа содержит инструкции для обновления устройства накопления паразитного эхо-сигнала данными паразитного эхо-сигнала, когда упомянутая компьютерная программа предварительно, в течение параметризуемого периода времени, идентифицирует полезный эхо-сигнал как таковой в результате динамического характера изменения положения типичных характеристик эхо-сигнала, причем упомянутая компьютерная программа использует паразитные эхо-сигналы, распознанные в результате статического характера изменения их типичных характеристик за тот же период времени, для обновления устройства накопления паразитного эхо-сигнала.
Например, отправной точкой настоящего изобретения является кривая эхо-сигнала, сканированная и записанная посредством аналого-цифрового преобразования. В этом способе записывание кривой отраженного эхо-сигнала может быть выполнено посредством обработки ультразвуковых импульсов или радарных импульсов, периодически передаваемых измерителем уровня заполнения в направлении материала, который должен быть измерен. После этого первого относящегося к способу этапа принятая кривая эхо-сигнала доступна в цифровом виде, например, с измерениями положения, периода и амплитуды для обработки микропроцессором или микроконтроллером. После этого аналого-цифрового преобразования амплитуда эхо-сигналов огибающей кривой уровня заполнения может быть сохранена, в зависимости от положения и периода, в двумерном массиве либо матрице. В случае трех полученных измерений положения s, амплитуды А и периода t определенная амплитуда А назначается каждому периоду t и положению s, т.е. А(t,s). Если одно или несколько дополнительных измерений получены по эхо-сигналу, такие как, например, давление или другая физическая характеристика, то данные эхо-сигнала могут быть сохранены соответственно в четырехмерном или многомерном массиве либо в тензоре. В случае, если эхо-сигнал получен с измерениями положения s, амплитуды А, периода t и, например, давления p, то это могло бы означать, что конкретная амплитуда А и конкретное давление p ассоциативно связаны с каждым эхо-сигналом периода t и положения s.
t, s → A, p
Размер массива, в который записываются данные эхо-сигнала в этом способе, переменный и может динамически обновляться посредством способа по различным параметрам, таким как, например, скорость наполнения или размер временного окна. Однако было показано пригодным записывать в массив, для дальнейшей оценки, от двух до 20 кривых эхо-сигналов различных периодов или ассоциируемых характеристик эхо-сигнала. Хорошие результаты были получены с размером массива примерно в 10 кривых эхо-сигнала. В частности, было показано выгодным работать с размером массива в 5 кривых эхо-сигнала разных периодов, при этом любые другие желаемые размеры также могут быть рассмотрены.
Чтобы быть способным реализовать представленный способ так, чтобы оптимизировать пространство хранения, целесообразно первоначально извлекать отдельные эхо-сигналы из кривых эхо-сигналов, полученных на первом этапе, и сохранять их вместе с их типичными характеристиками, такими как, например, период t, положение s и амплитуда A, вместо сохранения кривой эхо-сигнала целиком.
После того как кривые эхо-сигналов либо их соответственные ассоциативно связанные типичные характеристики эхо-сигнала были сохранены, как описано выше, эхо-сигналы сохраненных кривых эхо-сигнала различных периодов распределяются по общим группам эхо-сигналов с одинаковым источником отражения. Такое распределение по общим группам эхо-сигналов может происходить в один этап, однако предпочтительно в несколько этапов, что гарантирует более достоверное распределение соответственных эхо-сигналов по соответствующим общим группам эхо-сигналов с одинаковым источником отражения. В части распределения эхо-сигналов различных периодов по общим группам эхо-сигналов возможно, например, сначала объединять соответствующие эхо-сигналы кривых эхо-сигналов различных периодов с использованием коррелированных типовых характеристик эхо-сигнала, чтобы сформировать локальные группы эхо-сигналов с одинаковым источником отражения.
Впоследствии эти коррелированные эхо-сигналы из локальных групп эхо-сигналов могут быть распределены по соответствующим общим группам эхо-сигналов одинакового источника отражения, снова с использованием соответствующих коррелированных типовых характеристик эхо-сигналов. Чтобы обновлять общие группы эхо-сигналов в этой последовательности операций, например, самые старые эхо-сигналы локальных групп эхо-сигналов могут быть перенесены в соответствующие общие группы эхо-сигналов, при этом, конечно, также возможно не только переносить самые старые эхо-сигналы из локальных групп эхо-сигналов в соответствующие общие группы эхо-сигналов, но также переносить подгруппы локальных групп эхо-сигналов в соответствующие общие группы эхо-сигналов.
После того как общие группы эхо-сигналов были обновлены описанным образом, эхо-сигналы, которые были объединены, чтобы сформировать общие группы эхо-сигналов, анализируются касательно изменений в их типичных характеристиках со временем. В этом анализе, например, возможно проверять изменения со временем в положениях эхо-сигнала или амплитуде эхо-сигнала, а также ассоциативно связанных максимальных, минимальных или средних значениях или любые изменения в форме отдельных эхо-сигналов. Чтобы дополнительно улучшить достоверность анализа в отношении локальных сдвигов, количество эхо-сигналов, сохраненных в общих группах эхо-сигналов, предпочтительно является большим. В этом контексте полезно сохранять s эхо-сигналов в общих группах эхо-сигналов, где 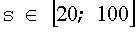 . Конечно, если имеется в распоряжении соответствующая производительность обработки, также возможно сохранить и в дальнейшем обрабатывать более 100 эхо-сигналов в общих группах эхо-сигналов. Тем не менее, хорошие результаты могут быть достигнуты в общих группах эхо-сигналов, в которых сохранены приблизительно 50 или 55 эхо-сигналов. Посредством поддержания количества эхо-сигналов, сохраненных в общих группах эхо-сигналов, большим может быть достигнута ситуация, в которой случайные сдвиги эхо-сигнала, вызванные помехой, не приводят к ошибочному истолкованию относительно любых связанных со временем сдвигов эхо-сигнала. Кроме того, для дополнительного улучшения достоверности анализа в отношении локальной перестановки эхо-сигнала является полезным, если в анализе используются способы одномерной или многомерной обработки сигнала, такие как, например, фильтрация, усреднение, выборка или другие способы цифровой обработки изображений.
. Конечно, если имеется в распоряжении соответствующая производительность обработки, также возможно сохранить и в дальнейшем обрабатывать более 100 эхо-сигналов в общих группах эхо-сигналов. Тем не менее, хорошие результаты могут быть достигнуты в общих группах эхо-сигналов, в которых сохранены приблизительно 50 или 55 эхо-сигналов. Посредством поддержания количества эхо-сигналов, сохраненных в общих группах эхо-сигналов, большим может быть достигнута ситуация, в которой случайные сдвиги эхо-сигнала, вызванные помехой, не приводят к ошибочному истолкованию относительно любых связанных со временем сдвигов эхо-сигнала. Кроме того, для дополнительного улучшения достоверности анализа в отношении локальной перестановки эхо-сигнала является полезным, если в анализе используются способы одномерной или многомерной обработки сигнала, такие как, например, фильтрация, усреднение, выборка или другие способы цифровой обработки изображений.
Посредством оценки предварительно полученных результатов анализа в дополнительных этапах способа общие группы эхо-сигналов затем классифицируются на группы эхо-сигналов с динамическим изменением положения и статическим изменением положения. В этом способе, например, те общие группы эхо-сигналов, в которых локальный сдвиг ассоциативно связанных эхо-сигналов превышает зависящий от параметра минимальный локальный сдвиг, могут быть идентифицированы как группы эхо-сигналов с динамическим изменением положения. Из этих групп эхо-сигналов, которые распознаны как сигналы с динамическим изменением положения, затем, к примеру, возможно идентифицировать группу эхо-сигналов в непосредственной близости как группу, являющуюся одной из тех, которые представляют уровень заполнения. Все остальные общие группы эхо-сигналов могут быть в таком случае классифицированы в качестве представляющих паразитные эхо-сигналы.
Когда, таким образом, общие группы эхо-сигналов и, в частности, общие группы эхо-сигналов, которые представляют паразитные эхо-сигналы, были обновлены, в заключение устройство накопления паразитного эхо-сигнала измерителя уровня заполнения может быть обновлено в зависимости от результатов предварительно завершенных классификаций. Согласно изобретению только паразитные эхо-сигналы, которые расположены между измерителем уровня заполнения и полезным эхо-сигналом, обновляются в устройстве накопления.
Представленный выше способ, таким образом, имеет возможность независимо обновлять устройство накопления паразитного эхо-сигнала измерителя уровня заполнения в соответствии с результатами классификации. Инициация обновления устройства накопления паразитного эхо-сигнала может, например, происходить, когда во время анализа общих групп эхо-сигналов было обнаружено максимально допустимое предварительно настраиваемое изменение в эхо-сигнале в зависимости от амплитуды или положения. В этом цикле обновления устройства накопления паразитного эхо-сигнала, например, эхо-сигнал с резко выраженным изменением в положении, причем эхо-сигнал расположен в непосредственной близости к измерителю уровня заполнения, объявляется полезным эхо-сигналом. Наоборот, остальные эхо-сигналы, чья позиция находится между измерителем уровня заполнения и настоящим полезным эхо-сигналом, могут быть объявлены как являющиеся паразитными эхо-сигналами. Если описанная классификация достаточно стабильна, то способ может передать полученные таким образом знания о ситуации измерения в устройство накопления паразитного эхо-сигнала измерителя уровня заполнения. Однако если из-за отсутствия перемещения в положениях эхо-сигнала классификация на полезные эхо-сигналы и паразитные эхо-сигналы не произошла или если связанная со временем оценка не получила в результате какие-либо статические результаты классификации, то устройство накопления паразитного эхо-сигнала не обновляется. Таким образом может быть достигнута повышенная безопасность относительно возможности сохранения ложного паразитного эхо-сигнала.
Соответствующий измеритель уровня заполнения, а также обособленное устройство оценки для динамического обновления устройства накопления паразитного эхо-сигнала измерителя уровня заполнения, причем устройство оценки обновляет устройство накопления паразитного эхо-сигнала данными паразитного эхо-сигнала, которые ранее были идентифицированы как таковые согласно описанному выше способу, содержит блок оценки с запоминающим устройством, в котором сохранено заданное количество огибающих кривых эхо-сигнала с измерениями положения, времени и амплитуды. Кроме того, блок оценки измерителя уровня заполнения или устройства оценки содержит микропроцессор, который - посредством определенных математических алгоритмов, которые более детально будут описаны далее, и с использованием способов одномерной или многомерной обработки сигнала - совершает распределение эхо-сигналов накопленных кривых эхо-сигналов разных периодов по общим группам эхо-сигналов одинакового источника отражения и затем анализирует и классифицирует распределенные эхо-сигналы согласно способу по изобретению, и в заключение, таким образом обновляет устройство накопления паразитного эхо-сигнала.
Соответствующая компьютерная программа для динамического обновления устройства накопления паразитного эхо-сигнала измерителя уровня заполнения выполняет способ согласно изобретению; она реализована, например, как подпрограмма в программе оценки для оценки выработанных огибающих кривых. Такие программы оценки известны, например, под торговой маркой Echofox® of VEGA Grieshaber KG, Германия. Соответственно, способ согласно изобретению и соответственно работающая компьютерная программа могут быть либо реализованы в отдельном устройстве оценки, либо, если требуется, могут быть интегрированы прямо в измеритель уровня заполнения.
Краткое описание чертежей
Ниже, для дополнительного объяснения и чтобы обеспечить лучшее понимание настоящего изобретения, более подробно описан один из вариантов осуществления изобретения со ссылкой на прилагаемые чертежи.
Фиг.1 показывает вид сбоку установки измерения уровня заполнения с бесконтактным измерителем уровня заполнения.
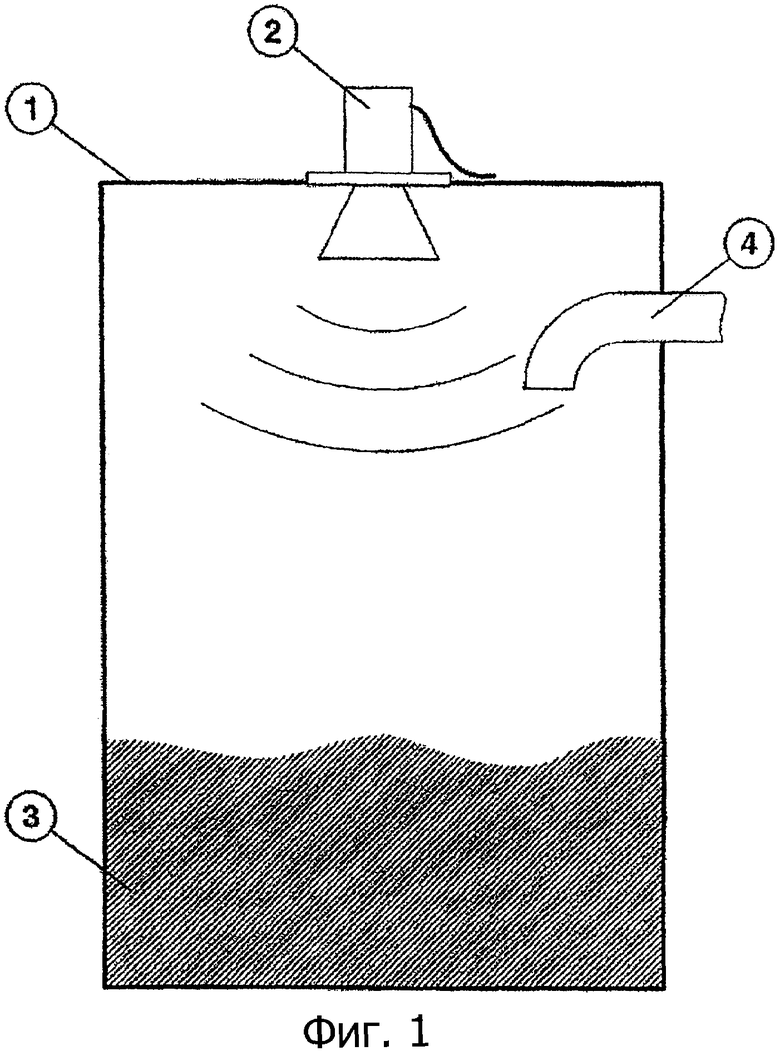
Фиг.2 показывает схематичный вид сбоку измерителя уровня заполнения.
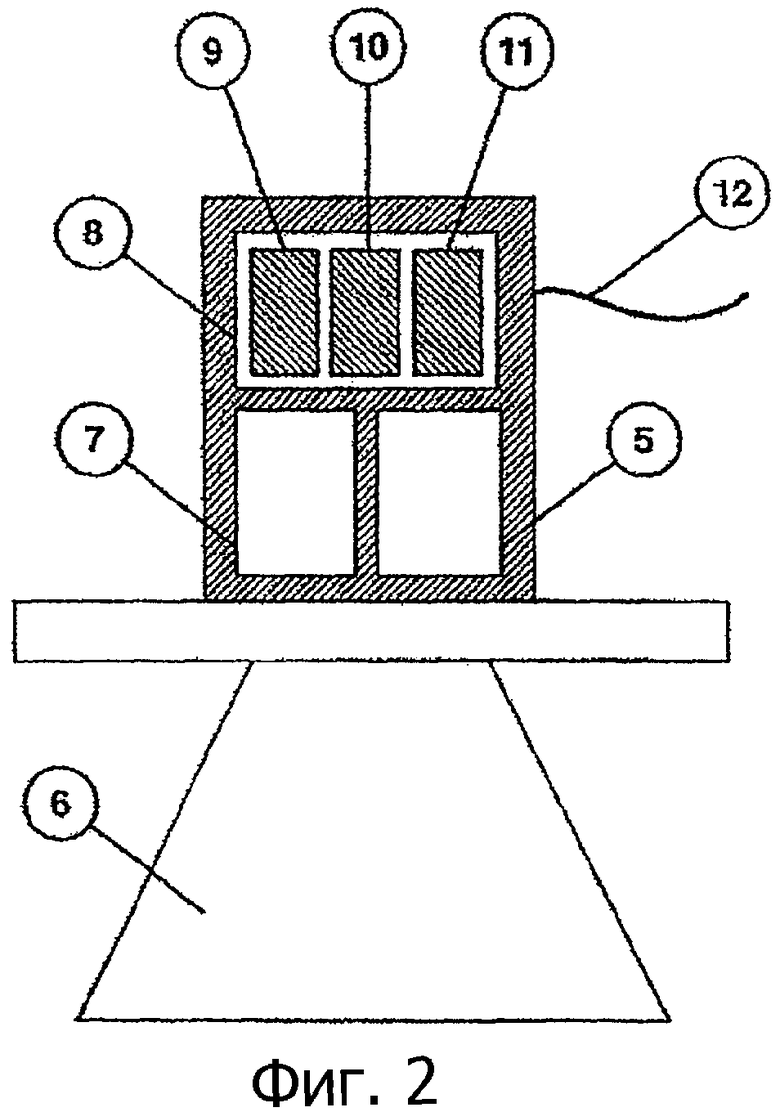
Фиг.3 показывает схематичный вид сбоку устройства оценки.
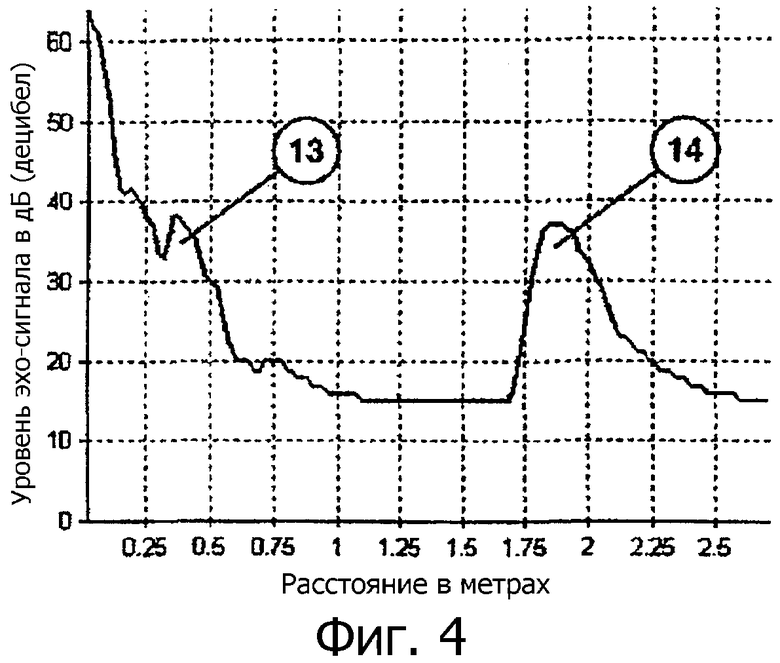
Фиг.4 показывает графическое представление оцифрованной кривой эхо-сигнала измерителя уровня заполнения в единицах физических величин.
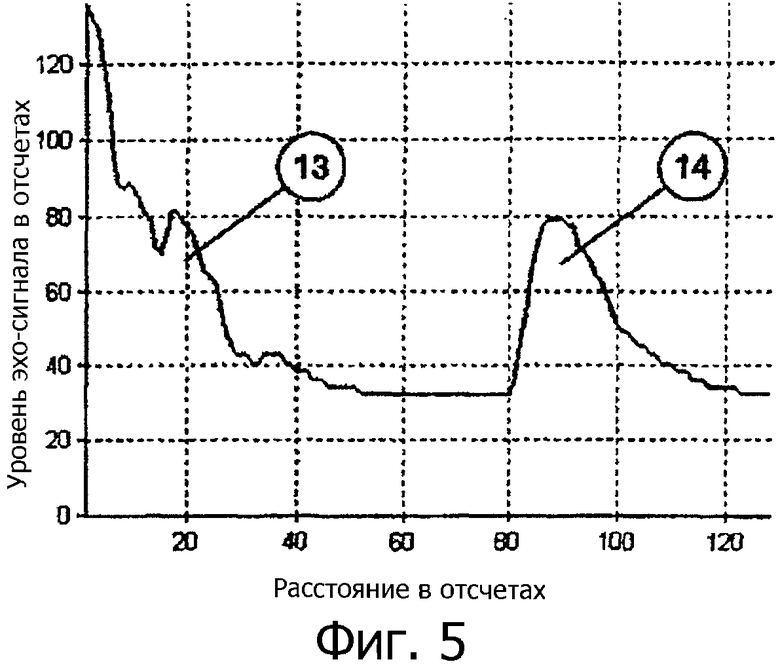
Фиг.5 показывает кривую эхо-сигнала измерителя уровня заполнения без единиц измерения.
Фиг.6 показывает блок-схему последовательности операций способа, поясняющую способ измерения уровня заполнения.
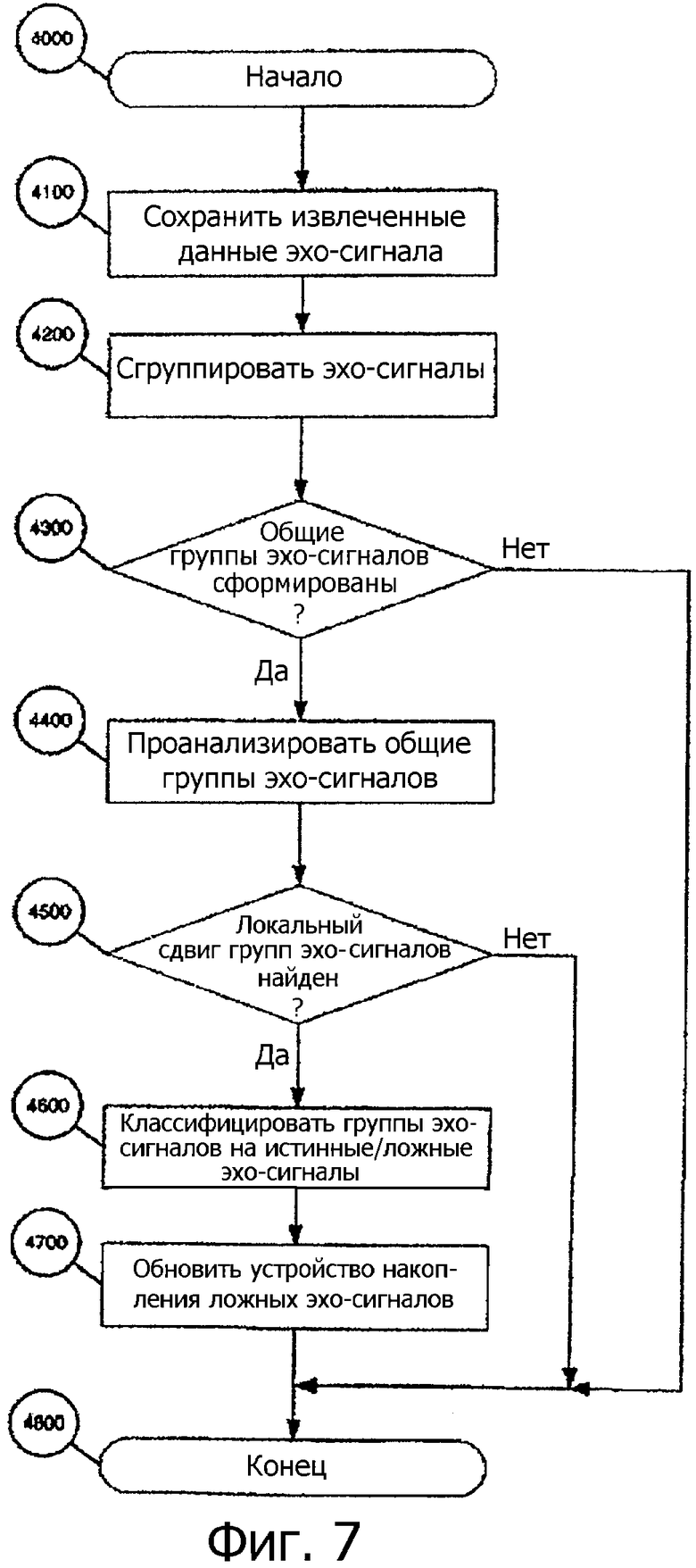
Фиг.7 показывает блок-схему последовательности операций способа, поясняющую обновление устройства накопления паразитного эхо-сигнала, согласно изобретению.
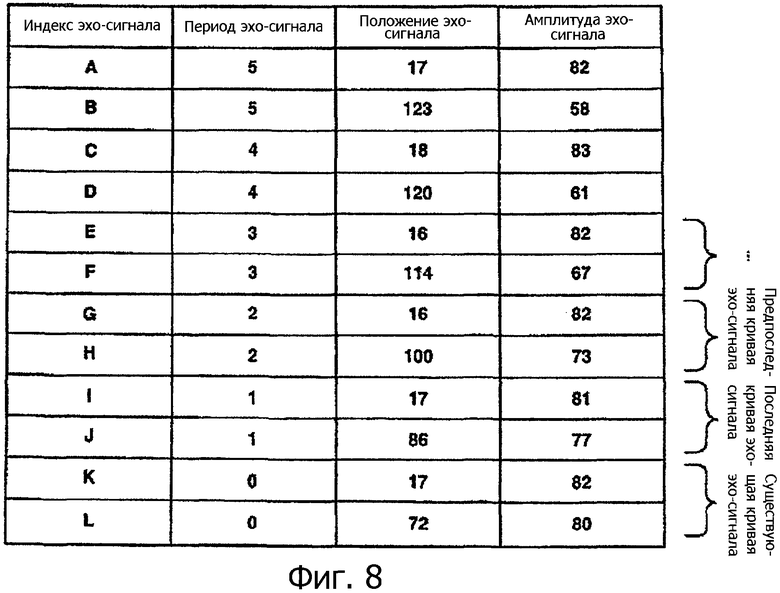
Фиг.8 показывает фрагмент из массива для хранения эхо-сигналов.
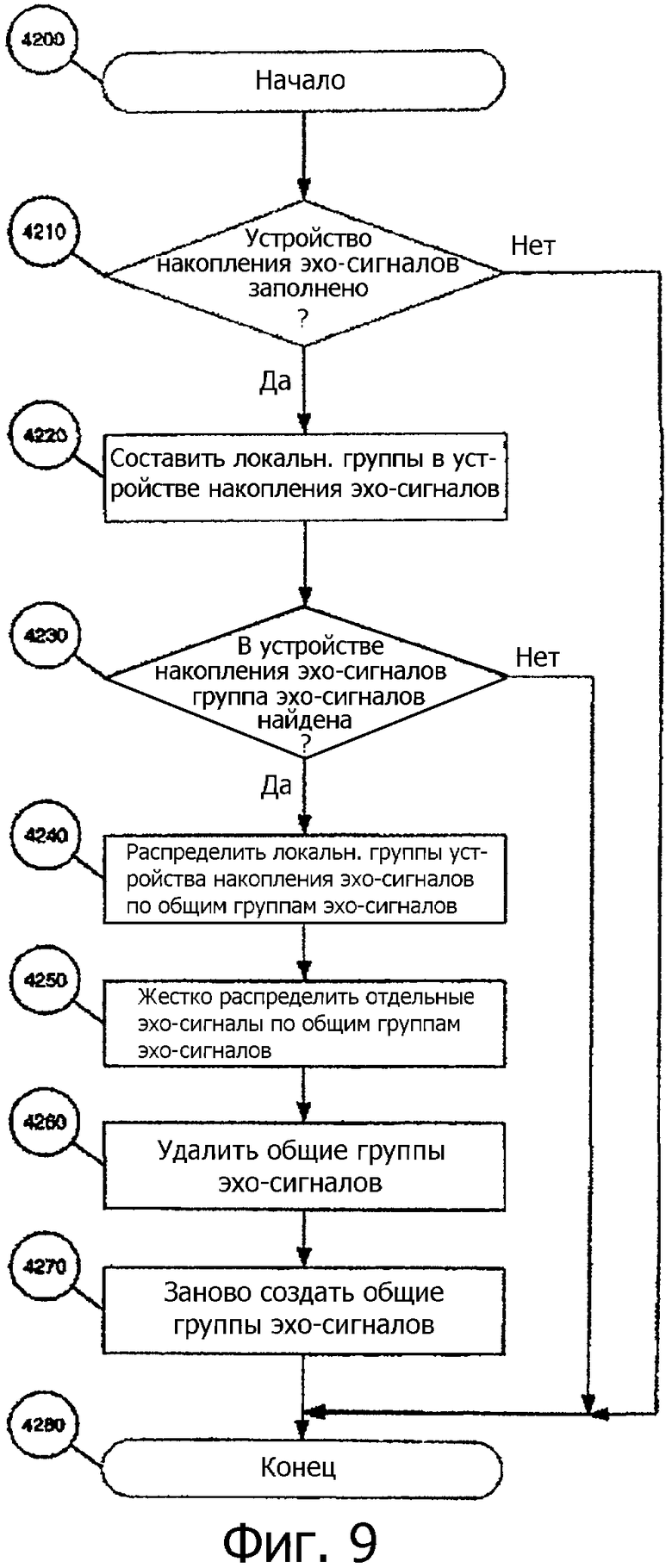
Фиг.9 показывает блок-схему последовательности операций способа для объяснения группирования эхо-сигналов.
Фиг.10 показывает таблицу для объяснения комбинаторного определения локальных групп эхо-сигналов.
Фиг.11 показывает несколько общих групп эхо-сигналов в табличной форме.
Фиг.12 показывает блок-схему последовательности операций способа, поясняющую анализ общих групп эхо-сигналов.
Фиг.13 показывает фрагмент из массива устройства накопления паразитного эхо-сигнала.
На всех чертежах идентичное оборудование, блоки и этапы способа обозначены соответствующими номерами позиций.
Описание примерного варианта реализации изобретения
Фиг.1 показывает типичное применение для использования способа согласно изобретению. Измеритель 2 уровня заполнения, установленный в зоне крышки контейнера 1, регулярно передает отдельные пакеты импульсов в направлении материала 3, который должен быть измерен. Излучаемые волны отражаются как материалом 3, который должен быть измерен, так и объектами 4, встроенными в контейнер, и, кроме того, принимаются измерителем 2 уровня заполнения. Сам измеритель 2 уровня заполнения содержит несколько отдельных компонентов, которые при их взаимодействии предоставляют устройство, пригодное для реализации способа согласно изобретению.
Фиг.2 показывает базовую конструкцию измерителя 2 уровня заполнения, с которой может быть выполнен способ согласно изобретению. Радарный импульс или ультразвуковой импульс, выработанный передающим устройством 5, излучается посредством антенны 6 измерителя 2 уровня заполнения в направлении материала 3, который должен быть измерен. Составляющие сигнала, отраженные материалом 3 и другими сборками 4, принимаются антенной 6 по истечении зависящего от расстояния времени прохода и передаются в принимающий и обрабатывающий блок 7. Внутри принимающего и обрабатывающего блока 7 сигналы демодулируются, если необходимо, а затем усиливаются, фильтруются и преобразуются известным образом в двоичное представление посредством аналого-цифрового преобразователя.
Полученная таким образом оцифрованная кривая эхо-сигнала в заключение сохраняется в энергозависимой памяти 9 блока 8 оценки. Блок 8 оценки анализирует переданную огибающую кривую эхо-сигнала и из этого определяет настоящую позицию материала 3, который должен быть измерен. Результаты анализа затем могут быть сделаны доступными для управляющей системы более высокого порядка посредством соединения 12 связи, такого как, например, линия передачи сигнала 4-20 мА.
Анализ согласно изобретению, который должен быть выполнен блоком 8 оценки, начинается с оцифрованной огибающей кривой эхо-сигнала, предоставленной принимающим и обрабатывающим блоком 7. Фиг.4 показывает пример оцифрованной огибающей кривой эхо-сигнала, такой, как она выработана в применении по фиг.1. Как можно видеть из фиг.4, показанная кривая эхо-сигнала имеет два эхо-сигнала 13, 14, которые ясно видны. Первый эхо-сигнал 13, приблизительно 0,35 м, вызван отражением излученного импульса на трубопроводе 4, показанном на фиг.1. Блок 8 оценки, следовательно, должен распознать этот эхо-сигнал как паразитный эхо-сигнал. Второй большой эхо-сигнал 14 находится на расстоянии 1,80 м; он вызван отражением от сыпучего материала (содержимого) 3.
Кривая эхо-сигнала, используемая в следующем примере, показана на фиг.5. Кривая эхо-сигнала по существу соответствует кривой эхо-сигнала, показанной на фиг.4, за исключением того, что кривая эхо-сигнала по фиг.5 имеет безразмерные значения, которые обычны в измерителе уровня заполнения.
Кроме энергозависимой памяти 9, блок 8 оценки содержит энергонезависимое запоминающее устройство 10, а также процессорный модуль 11 для реализации способа согласно изобретению. Описания вычислений, хранящихся в энергонезависимом запоминающем устройстве 10, более подробно объяснены в блок-схеме последовательности операций способа, показанной на фиг.6.
Вместо оценки кривых эхо-сигналов в блоке 8 оценки измерителя 2 уровня заполнения, конечно, возможно также выполнять оценку с использованием устройства 15 оценки, показанного на фиг.3. Фиг.3 показывает схематическое представление устройства 15 оценки, которое, посредством применения способа согласно изобретению, определяет и оценивает эхо-сигналы, принятые измерителем 2 уровня заполнения по фиг.1. С этой целью устройство 15 оценки, аналогично измерителю 2 уровня заполнения, содержит энергозависимую память 9, энергонезависимое запоминающее устройство 10, а также процессорный модуль 11. В отличие от измерителя 2 уровня заполнения по фиг.2, устройство 30 оценки может находиться в положении, отличном от непосредственного в контейнере, и поэтому подходит, чтобы одновременно оценивать огибающие кривые эхо-сигнала нескольких измерителей уровня заполнения.
В начале способа кривая эхо-сигнала, хранящаяся в энергозависимой памяти 9, фильтруется посредством способа одномерной или многомерной обработки сигнала, например, чтобы подавить содержащиеся в ней составляющие помехи. Из отфильтрованной огибающей кривой эхо-сигнала, полученной этим путем, впоследствии, на этапе 3000, извлекаются содержащиеся в ней типичные характеристики эхо-сигналов. Используемый при этом способ сначала, например, вычисляет динамическое пороговое значение, которое следует за основным направлением движения кривой (градиент). После того как типичные характеристики эхо-сигнала, такие как, например, положение эхо-сигнала s и амплитуда эхо-сигнала А, определены, эхо-сигналы, содержащиеся в кривой эхо-сигнала, которые находятся выше порогового значения, перемещаются в устройство временного накопления эхо-сигналов.
На этапе 4000, на основе собранного значительного количества характеристик эхо-сигналов, делается попытка обновить устройство накопления паразитного эхо-сигнала измерителя 2 уровня заполнения. Используемые на этом этапе последовательности операций подробно описаны ниже. Информация, содержащаяся в устройстве накопления паразитного эхо-сигнала, впоследствии используется, чтобы удалять известные паразитные эхо-сигналы (ложные эхо-сигналы) из представленной таблицы эхо-сигналов. Из оставшихся данных эхо-сигнала, принимая в расчет амплитуду эхо-сигнала, на этапе 6000 делается попытка определить эхо-сигнал, который действительно принадлежит информации об уровне заполнения. Если такой эхо-сигнал может быть идентифицирован, он точно измеряется с использованием кривой эхо-сигнала, которая существует в устройстве накопления, с тем чтобы определить точное положение верхней поверхности содержимого. На этапе 9000 полученное измеренное значение затем передается в устройство связи более высокого порядка (не показано), такое как, например, пункт управления производственным процессом.
Обновление устройства накопления паразитного эхо-сигнала, выполненное на этапе 4000, заключает в себе фактически основную базисную точку настоящего изобретения. Фиг.7 показывает ассоциативно связанную блок-схему последовательности операций способа. На этапе 4000, прежде всего, временно накопленные характеристики эхо-сигналов переносятся в блок накопления эхо-сигналов, показанный на фиг.8. Кроме извлеченных характеристик эхо-сигналов представленной кривой эхо-сигнала, показанный массив также включает в себя характеристики эхо-сигнала эхо-сигналов пяти последних записей. Период t эхо-сигнала, введенный в столбце 2, показывает количество измерений, которые были выполнены с момента извлечения представленной кривой эхо-сигнала. Следовательно, период t=2 эхо-сигнала показывает, что ассоциативно связанные характеристики эхо-сигнала возникают из предпоследнего измерения.
После того как характеристики эхо-сигналов были перенесены в устройство накопления эхо-сигналов, на этапе 4200 делается попытка сгруппировать эхо-сигналы, содержащиеся в устройстве накопления эхо-сигналов. Цель такой группировки состоит в том, чтобы скомпоновать эхо-сигналы, вызванные в каждом случае тем же самым источником отражения, различных измерений (другими словами, кривые эхо-сигналов разных периодов), с тем чтобы сформировать (общие) группы. Способ распределения, применяемый в этой последовательности операций, более подробно пояснен на фиг.9.
При условии, что устройство накопления эхо-сигнала (4210) полностью заполнено, как показано на фиг.8, на первом этапе 4220 эхо-сигналы, содержащиеся в устройстве накопления эхо-сигнала, компонуются, чтобы сформировать локальные группы. На втором этапе 4240, только при условии, что было возможно идентифицировать локальную группу эхо-сигналов в устройстве накопления эхо-сигналов (4230), делается попытка перенести локально найденные группы эхо-сигналов в логическую связь с общей группой эхо-сигналов, найденной в прошлом. Другими словами, эхо-сигнал только дополняется для формирования существующей общей группы эхо-сигналов, если существуют дополнительные эхо-сигналы, которые образуют локальную группу с первым эхо-сигналом. Это предотвращает ложное распределение одиночного эхо-сигнала, например случайно порожденного помехой, в общие группы эхо-сигналов. Этот способ возвращает безусловно улучшенные результаты, при сравнении с результатами, полученными непосредственным распределением отдельных эхо-сигналов в группы эхо-сигналов, найденные в прошлом.
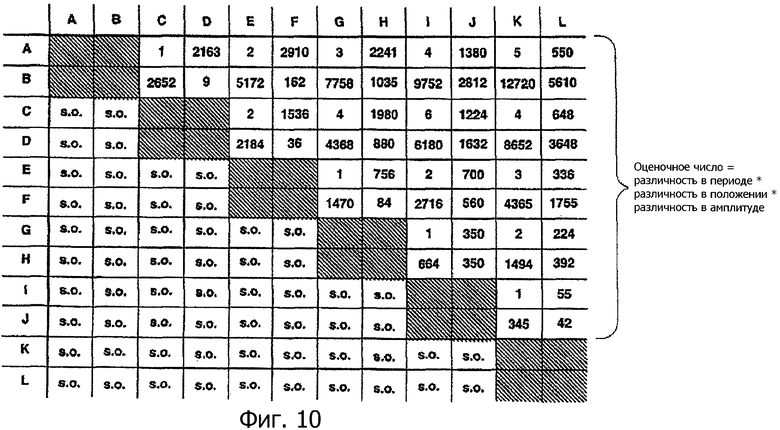
В целях формирования локальных групп (этап 4220), например, эхо-сигналы разных периодов i,j могут быть комбинаторно сравнены и соотнесены друг с другом. Для каждого результирующего комбинационного варианта возможно, например, вычислять оценочное число, принимая в расчет различие в периодах соответствующих эхо-сигналов, разность в амплитуде и соответствующие локальные отклонения. Посредством оценочных чисел, получающихся этим путем, может быть выполнено однозначное распределение отдельных эхо-сигналов для формирования групп, как графически показано на фиг.10. Оценочное число между эхо-сигналом i и эхо-сигналом j может быть рассчитано, например, с использованием следующего равенства:
Оценочное число (i,j) = max {1, abs[(EA(i)-EA(j))·(EO(i)- EO(j))·(EAmp(i)-EAmp(j))]},
при этом:
ЕА (i) - период эхо-сигнала i,
ЕА (j) - период эхо-сигнала j,
ЕО (i) - положение эхо-сигнала i,
ЕО (j) - положение эхо-сигнала j,
EAmp (i) - амплитуда эхо-сигнала i,
EAmp (j) - амплитуда эхо-сигнала j,
i ≠ j ∧ EA(i) ≠ EA (j),
i,j = A…L.
Оценочные числа, проистекающие из эхо-сигналов по фиг. 8, показаны в таблице по фиг.10. Упомянутая выше инструкция по вычислению является только одним примером возможной реализации. Конечно, могут быть выбраны другие комбинации или умножение на весовой коэффициент установленных значений, в зависимости от параметров.
Основываясь на таблице оценочных чисел, показанной в фиг.10, для каждого из определенных эхо-сигналов (столбец 1 таблицы) устанавливается соответствующий партнер по группе, т.е. соответствующий эхо-сигнал из кривой эхо-сигнала другого периода. Соответствующий эхо-сигнал характеризуется минимальным оценочным числом в соответствующей строке. Следовательно, следующие группы получаются в результате в вышеприведенном примере:
AC BD CE DF EG FH GI HJ IK JL
Согласно правилам теории множеств эти подгруппы могут быть собраны для формирования больших (локальных) групп эхо-сигналов. В заключение, следующие локальные группы эхо-сигналов получаются в результате:
ACEGIK BDFHJL
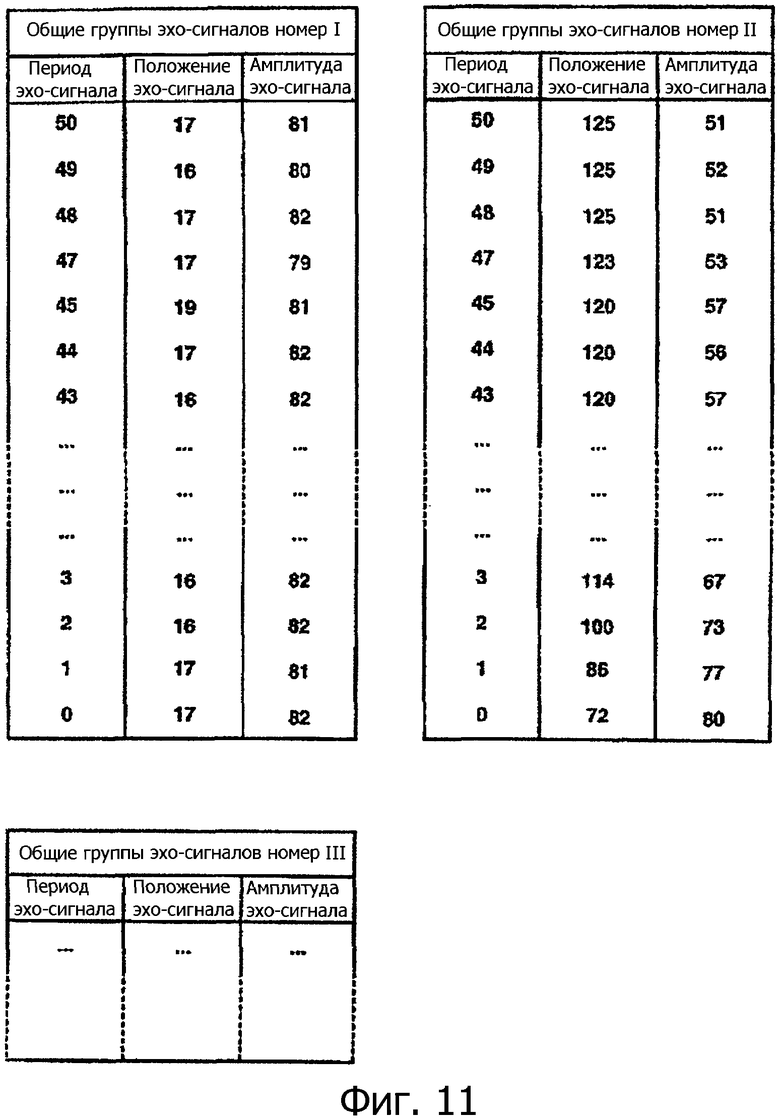
Если формирование локальных групп эхо-сигналов, как показано в вышеприведенном примере, было успешным в устройстве накопления эхо-сигналов (запрос на этапе 4230), то на этапе 4240 делается попытка объединить эти локальные группы эхо-сигналов с общими группами эхо-сигналов, которые были найдены на предыдущих проходах. Общие группы эхо-сигналов содержат информацию эхо-сигналов, которые подходят друг к другу на протяжении 50 записей (подтверждено фиг.11), при этом, конечно, могут быть реализованы другие протяженности. Распределение среди локальных групп эхо-сигналов в устройстве накопления эхо-сигналов и общих групп эхо-сигналов может снова происходить посредством комбинаторного сравнения, принимая в расчет критерий «отклонение амплитуды» и «локальное отклонение», при этом для вычисления локального отклонения используются только самая последняя составляющая общей группы эхо-сигналов устройства накопления и самая старая составляющая локальной группы эхо-сигналов устройства накопления, при этом, конечно, возможны и другие критерии. В отличие от этого, сравнение характеристик отклонения амплитуды между локальными и общими группами эхо-сигналов происходит с использованием соответственных средних амплитуд обеих групп. Например, в случае нежелательного воздействия помех, это приводит к более стабильной обработке способа, когда происходит внезапное изменение амплитуды. Аналогично способу, показанному в фиг.10, оценочное число между локальной группой m эхо-сигналов и общей группой n эхо-сигналов снова может быть сформировано:
Оценочное число (m,n) = max {1, abs[(DAmp(m)-DAmp(n))·(ELocation(m)-ELocation(n))]},
где:
DAmp(m) - средняя амплитуда локальной группы m эхо-сигналов,
DAmp(n) - средняя амплитуда локальной группы n эхо-сигналов,
ELocation(m) - расположение эхо-сигнала самого старого элемента локальной группы m эхо-сигналов,
ELocation(n) - расположение эхо-сигнала самого старого элемента локальной группы n эхо-сигналов.
По завершении вычисления оценочного числа общая группа n эхо-сигналов пополняется самым старым эхо-сигналом соответствующей локальной группы m или даже целой локальной группой эхо-сигналов, которая при сравнении с другими выдала в результате наименьшее оценочное число. Связь между локальными и общими группами эхо-сигналов установлена не жестко, а динамически; она применяется только к настоящему прогону способа. Поэтому на этапе 4250 самые старые составляющие локальных групп эхо-сигналов переносятся, в соответствии с настоящим их распределением, в таблицу ассоциативно связанной общей группы эхо-сигналов. На этапе 4260 общие группы эхо-сигналов, которые по истечении зависящего от параметра времени не могут выполнить увеличение посредством размещения локальной группы, удаляются. При практическом применении этот случай всегда возникает, когда эхо-сигнал, который был представлен вплоть до этого времени и который был представлен этой группой, неожиданно исчезает, например, если потерян полезный эхо-сигнал или исчезло налипание материала.
С другой стороны, также возможно, что локально найденный эхо-сигнал или группы эхо-сигналов не могут быть распределены в какую-либо общую группу эхо-сигналов. На этапе 4270 эти локальные группы эхо-сигналов устанавливаются как новые общие группы. В практическом применении этот случай возникает, если появляется новый эхо-сигнал, например, когда происходит прилипание содержимого к стенке контейнера.
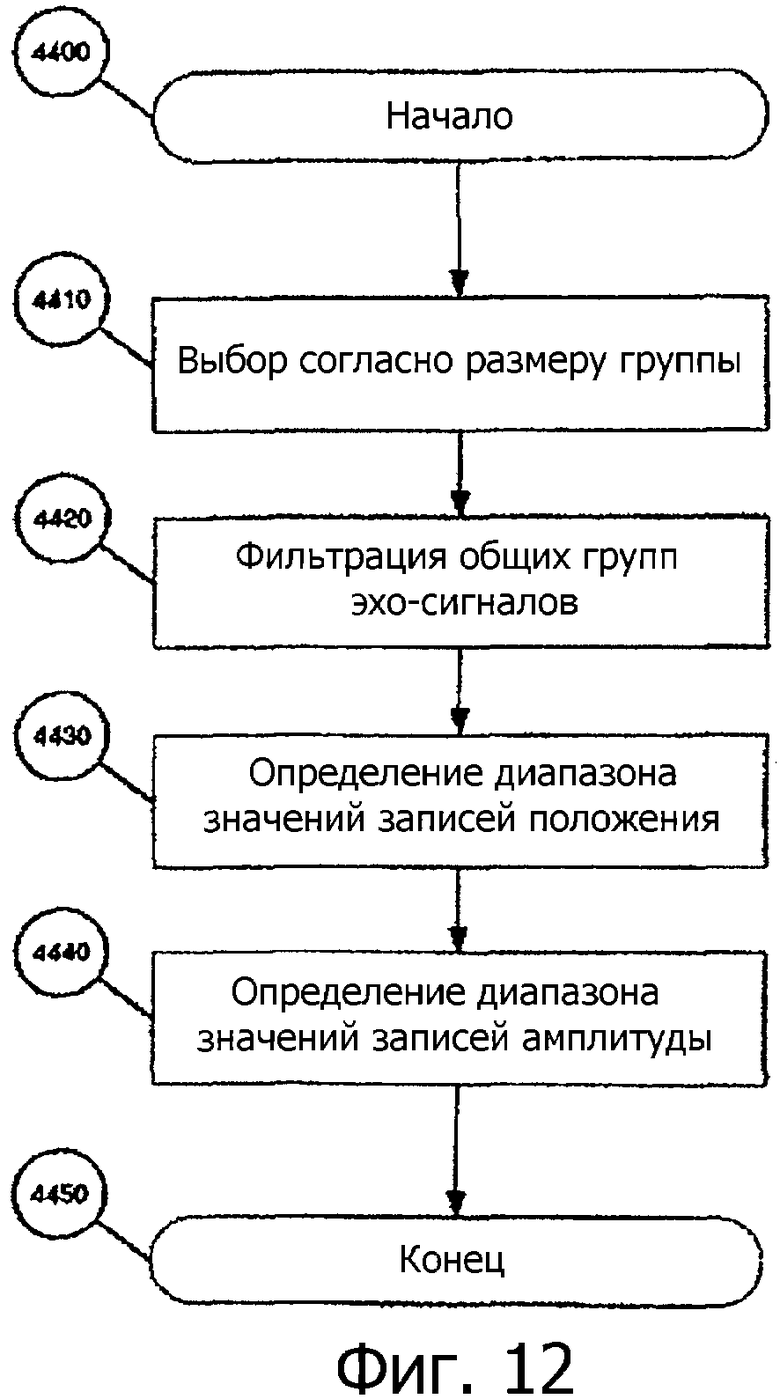
По завершении вычисления общих групп эхо-сигналов, на этапе 4400 по фиг.7 найденные общие группы эхо-сигналов проверяются более тщательно. Цели проверки - обнаружить локальные изменения в достаточно больших общих группах эхо-сигналов. В процессе этого выполняется анализ по относящимся к способу этапам, показанным на фиг.12. Для того чтобы гарантировать достоверность результатов, для дальнейшей проверки используются только те группы эхо-сигналов, которые достигли параметризуемого минимального размера. Другими словами, исследуются только те группы эхо-сигналов, чье появление уже наблюдалось в течение некоторого времени.
Эти группы эхо-сигналов могут быть затем отфильтрованы относительно положения, а также относительно амплитуды, с использованием способов одномерной или многомерной обработки сигнала, например, таких как фильтрация, усреднение, выборка или классификация. В случае усреднения, например, составляющие положения и (или) составляющие амплитуды общих групп эхо-сигналов рассматриваются как цифровой сигнал и сглаживаются посредством выравнивания по соседним составляющим. Отдельные выпадающие из ряда значения, относящиеся к положению или амплитуде, могут быть эффективно устранены посредством этих мер. В заключение, в каждой группе эхо-сигналов достаточного размера минимальные и максимальные составляющие в категориях положения и амплитуды определяются и сохраняются в отдельной таблице.
Если по меньшей мере в одной из проверенных общих групп эхо-сигналов наблюдается зависящий от параметра минимальный сдвиг положения ассоциативно связанных эхо-сигналов, то на этапе 4600 по фиг.7 достаточно большие общие группы эхо-сигналов разделяются на группы эхо-сигналов с динамическим и статическим изменением положения. Согласно основным инструкциям расчета все группы эхо-сигналов достаточного размера, чей сдвиг положения больше, чем зависящий от параметра минимальный сдвиг положения, являются эхо-сигналами с динамическим изменением положения. Эхо-сигналы с динамическим изменением положения, которые расположены в непосредственной близости к измерителю уровня заполнения, позже распознаются как эхо-сигналы уровня заполнения. Паразитные эхо-сигналы таким образом могут быть обнаружены в области между измерителем уровня заполнения и настоящим уровнем заполнения. Следовательно, из числа оставшихся групп эхо-сигналов паразитными эхо-сигналами объявляются все те группы эхо-сигналов, чей сдвиг положения меньше, чем параметризуемый максимально допустимый сдвиг положения паразитного эхо-сигнала, и чей разброс амплитуды меньше, чем также параметризуемый максимально допустимый разброс амплитуды помехи.
На этапе 4700 информация паразитного эхо-сигнала, определенная с помощью вышеупомянутого способа, используется для обновления устройства накопления паразитного эхо-сигнала измерителя уровня заполнения. С этой целью вычисляются среднее положение и средняя амплитуда у каждой общей группы эхо-сигналов, которая была определена как паразитный эхо-сигнал, и вводятся в таблицу паразитных эхо-сигналов устройства накопления паразитного эхо-сигнала, как показано на фиг.13. Устаревшие составляющие в устройстве накопления паразитного эхо-сигнала, которые находятся в области между измерителем уровня заполнения и настоящим уровнем заполнения, также удаляются.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения акустической плотности | 2017 |
|
RU2657314C1 |
| СПОСОБ КОМПЕНСАЦИИ ИСКАЖЕНИЯ СИГНАЛА В ИЗЛУЧАЮЩЕЙ ПОЛЕЗНОЙ НАГРУЗКЕ | 2008 |
|
RU2467467C2 |
| ОТСЛЕЖИВАНИЕ С УЧЕТОМ ИЗМЕНЧИВОСТИ | 2012 |
|
RU2600496C2 |
| ОТСЛЕЖИВАНИЕ НА ОСНОВЕ ФАЗЫ | 2011 |
|
RU2576341C2 |
| Способ обнаружения воздушных объектов при зондировании сверхкороткими радиоимпульсами | 2022 |
|
RU2791275C1 |
| Система и способ измерения многофазного потока | 2022 |
|
RU2835812C2 |
| ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2010 |
|
RU2451300C1 |
| АВТОМАТИЧЕСКАЯ ОБРАБОТКА УЛЬТРАЗВУКОВЫХ ДАННЫХ | 2014 |
|
RU2650617C2 |
| ИЗМЕРЕНИЕ НА ОСНОВЕ ФУНКЦИИ ДЕТАЛИЗАЦИИ | 2008 |
|
RU2476901C2 |
| УСТРОЙСТВО ДЛЯ ПОСТОБРАБОТКИ ЗВУКОВОГО СИГНАЛА С ИСПОЛЬЗОВАНИЕМ ВЫЯВЛЕНИЯ МЕСТА ВСПЛЕСКА | 2018 |
|
RU2734781C1 |
Настоящее изобретение относится к способу для автоматической инициации обновления устройства накопления паразитного эхо-сигнала в измерителе уровня заполнения, работающего согласно способу рабочего цикла для измерения заполнения материала в контейнере. В этом способе отдельные эхо-сигналы разных периодов распределяются в соответствии с типичными характеристиками эхо-сигнала, по общим группам эхо-сигналов, с тем, чтобы впоследствии, после проверки общих кривых эхо-сигналов, можно было судить, являются ли эхо-сигналы соответственных общих кривых эхо-сигналов полезными эхо-сигналами или паразитными эхо-сигналами. Исходя из этой классификации устройство накопления паразитного эхо-сигнала затем обновляется эхо-сигналами соответствующих общих групп эхо-сигналов. Кроме способа для обновления устройства накопления паразитного эхо-сигнала, изобретение также относится к устройству оценки для реализации способа согласно изобретению, а также к машиночитаемому носителю, содержащему компьютерную программу. Достигаемым техническим результатом изобретения является возможность предотвращения ошибочного определения уровня заполнения контейнера материалом. 3 н. и 29 з.п. ф-лы, 13 ил.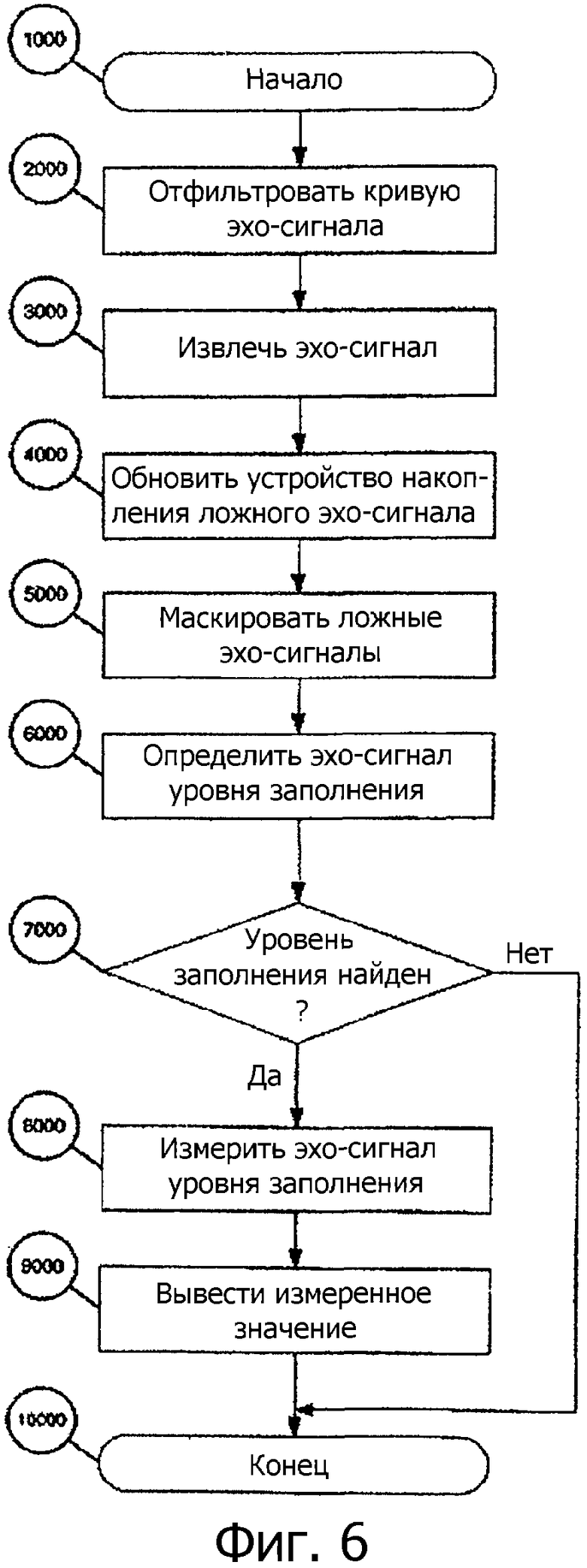
1. Способ динамического обновления устройства накопления паразитного эхо-сигнала измерителя (2) уровня заполнения, работающего согласно способу рабочего цикла для измерения уровня заполнения материала в контейнере, содержащий этапы, на которых периодически передают сигнал посредством измерителя уровня заполнения в направлении материала, причем устройство накопления паразитного эхо-сигнала обновляют данными паразитного эхо-сигнала, когда предварительно за допускающий параметризацию период времени полезный эхо-сигнал, отраженный материалом, был идентифицирован, как таковой, в результате динамического характера изменения положения типичных характеристик эхо-сигнала, состоящего из полезного эхо-сигнала и паразитного эхо-сигнала, причем паразитные эхо-сигналы, распознанные в результате статического характера изменения их типичных характеристик на протяжении того же периода времени, используют для обновления устройства накопления паразитного эхо-сигнала, причем паразитные эхо-сигналы вызваны, например множественными отражениями или отражениями от крепежных элементов, встроенных в контейнер.
2. Способ по п.1, в котором
записывают кривую эхо-сигнала, отраженную материалом (3), уровень заполнения которым должен быть измерен;
сохраняют, по меньшей мере, две из записанных кривых эхо-сигналов разных периодов; распределяют эхо-сигналы сохраненных кривых эхо-сигналов разных периодов по общим группам эхо-сигналов одинакового источника (3, 4) отражения;
анализируют эхо-сигналы, которые были объединены, чтобы сформировать общие группы эхо-сигналов в зависимости от изменений во времени типичных характеристик эхо-сигналов;
классифицируют общие группы эхо-сигналов в зависимости от предварительно полученных результатов анализа на полезные эхо-сигналы и паразитные эхо-сигналы; и
обновляют устройство накопления паразитного эхо-сигнала измерителя уровня заполнения в зависимости от результатов классификации.
3. Способ по п.2, в котором запись отраженной кривой эхо-сигнала происходит посредством обработки ультразвуковых импульсов или радарных импульсов, которые периодически излучают измерителем уровня заполнения в направлении материала (3).
4. Способ по п.2, в котором записанные кривые эхо-сигналов сохраняют на основании ассоциативно связанных типичных характеристик эхо-сигналов.
5. Способ по п.2, в котором во время анализа соответственных эхо-сигналов, объединенных, чтобы сформировать общие группы эхо-сигналов, изучают изменение во времени, по меньшей мере, одной из типичных характеристик эхо-сигнала из группы характеристик эхо-сигнала, состоящей из локального сдвига эхо-сигнала, изменения в форме и изменения по амплитуде.
6. Способ по п.2, в котором во время анализа для обнаружения изменений во времени используют способы одномерной или многомерной обработки сигнала.
7. Способ по п.6, в котором во время анализа применяют способы одномерной или многомерной обработки сигнала из числа группы способов обработки сигнала, состоящей из фильтрации, усреднения, выборки и классификации.
8. Способ по п.2, в котором распределение эхо-сигналов различных периодов для формирования общих групп эхо-сигналов происходит, по меньшей мере, в два этапа.
9. Способ по п.8, в котором на первом этапе соответствующие эхо-сигналы кривых эхо-сигналов с различным периодом эхо-сигнала объединяют на основе коррелированных типичных характеристик эхо-сигнала, чтобы сформировать локальные группы эхо-сигналов одинакового источника (3, 4) отражения.
10. Способ по п.9, в котором эхо-сигналы некоторого количества r кривых эхо-сигнала различных периодов объединяют, чтобы сформировать локальные группы эхо-сигналов, при этом применяют r ∈ [2; 10].
11. Способ по п.9, в котором на втором этапе, по меньшей мере, самые старые эхо-сигналы локальных групп эхо-сигналов распределяют по соответствующим общим группам эхо-сигналов одинакового источника отражения на основе коррелированных типичных характеристик эхо-сигнала.
12. Способ по п.11, в котором общие группы эхо-сигналов содержат максимально s эхо-сигналов, при этом применяют s ∈ [20; 100].
13. Способ по п.2, в котором существующую общую группу эхо-сигналов удаляют, если после допускающего параметризацию количества кривых эхо-сигналов не произошло распределение эхо-сигналов по общей группе эхо-сигналов.
14. Способ по п.2, в котором формируют новую общую группу эхо-сигналов, если после допускающего параметризацию количества кривых эхо-сигналов не произошло распределение эхо-сигналов кривых эхо-сигналов по существующей группе эхо-сигналов.
15. Способ по п.2, в котором обновление устройства накопления паразитного эхо-сигнала происходит, когда во время анализа общих групп эхо-сигналов было обнаружено изменение заданной величины эхо-сигнала в зависимости от амплитуды или положения.
16. Устройство оценки для динамического обновления устройства накопления паразитного эхо-сигнала измерителя (2) уровня заполнения, работающего согласно способу рабочего цикла для измерения уровня заполнения материала в контейнере, причем сигнал передают посредством измерителя уровня заполнения в направлении материала, причем устройство накопления паразитного эхо-сигнала обновляется данными паразитного эхо-сигнала, когда предварительно за допускающий параметризацию период времени устройство (15) оценки идентифицирует полезный эхо-сигнал, отраженный материалом, как таковой, в результате динамического характера изменения положения типичных характеристик эхо-сигнала, состоящего из полезного эхо-сигнала и паразитного эхо-сигнала, причем упомянутое устройство (15) оценки использует паразитные эхо-сигналы, распознанные в результате статического характера изменения их типичных характеристик на протяжении того же периода времени, для обновления устройства накопления паразитного эхо-сигнала, причем паразитные эхо-сигналы вызваны, например, множественными отражениями или отражениями от крепежных элементов, встроенных в контейнер.
17. Устройство оценки по п.16, в котором устройство (15) оценки предназначено для сохранения, по меньшей мере, двух кривых эхо-сигнала разных периодов, при этом кривые эхо-сигнала отражены материалом (3), который должен быть измерен, в устройстве (9) накопления, и для распределения ассоциативно связанных эхо-сигналов по общим группам эхо-сигналов одинакового источника (3, 4) отражения для того, чтобы анализировать эти эхо-сигналы в зависимости от изменения во времени их типичных характеристик эхо-сигналов, и на основе результатов анализа классифицировать общие группы эхо-сигналов на полезные эхо-сигналы и паразитные эхо-сигналы, при этом устройство оценки использует результаты классификации для обновления устройства накопления паразитного эхо-сигнала измерителя уровня заполнения.
18. Устройство оценки по п.17, в котором устройство (15) оценки сохраняет кривые эхо-сигнала на основе их ассоциативно связанных типичных характеристик эхо-сигналов.
19. Устройство оценки по п.17, в котором устройство (15) оценки анализирует изменение во времени эхо-сигналов, распределенных по общим группам эхо-сигналов, по меньшей мере, в зависимости от типичных характеристик эхо-сигнала из группы характеристик эхо-сигнала, состоящей из локального сдвига эхо-сигнала, изменения в форме и изменения по амплитуде.
20. Устройство оценки по п.17, в котором устройство (15) оценки для обнаружения изменений во времени применяет способы одномерной или многомерной обработки сигнала из группы способов обработки сигнала, содержащей фильтрацию, усреднение, выборку и классификацию.
21. Устройство оценки по п.17, в котором устройство (15) оценки предназначено для выполнения распределения эхо-сигналов различных периодов по общим группам эхо-сигналов, по меньшей мере, в два этапа.
22. Устройство оценки по п.21, в котором устройство (15) оценки на первом этапе объединяет соответствующие эхо-сигналы кривых эхо-сигналов различных периодов на основе коррелированных типичных характеристик эхо-сигнала, чтобы сформировать локальные группы эхо-сигналов одинакового источника (3, 4) отражения.
23. Устройство оценки по п.22, в котором устройство (15) оценки объединяет эхо-сигналы в количестве r кривых эхо-сигналов разных периодов, чтобы сформировать локальные группы эхо-сигналов, при этом применяется r ∈ [2; 10].
24. Устройство оценки по п.22, в котором устройство (15) оценки на втором этапе распределяет, по меньшей мере, самые старые эхо-сигналы локальных групп эхо-сигналов по соответствующим общим группам эхо-сигналов одинакового источника отражения на основе коррелированных типичных характеристик эхо-сигнала.
25. Устройство оценки по п.24, в котором общие группы эхо-сигналов содержат максимально s эхо-сигналов, при этом применяется s ∈ [20; 100].
26. Устройство оценки по п.16, в котором устройство (15) оценки удаляет существующую общую группу эхо-сигналов, если после допускающего параметризацию количества кривых эхо-сигнала упомянутое устройство (15) оценки не смогло распределить эхо-сигналы по общей группе эхо-сигналов.
27. Устройство оценки по п.16, в котором устройство (15) оценки формирует новую общую группу эхо-сигналов, если после допускающего параметризацию количества кривых эхо-сигналов указанное устройство (15) оценки не смогло распределить эхо-сигналы кривых эхо-сигналов по существующей группе эхо-сигналов.
28. Устройство оценки по п.16, в котором устройство (15) оценки обновляет устройство накопления паразитного сигнала, когда устройство (15) оценки во время анализа общих групп эхо-сигналов обнаруживает изменение заданной величины эхо-сигнала в зависимости от амплитуды или положения.
29. Устройство оценки по любому из пп.16-28, в котором устройство (15) оценки интегрировано в измеритель (2) уровня заполнения.
30. Устройство оценки по любому из пп.16-28, в котором устройство (15) оценки размещено отдельно от измерителя (2) уровня заполнения и подключено к измерителю (2) уровня заполнения посредством информационного соединения.
31. Машиночитаемый носитель, содержащий компьютерную программу, которая может быть загружена непосредственно в запоминающее устройство компьютера и которая содержит инструкции для выполнения способа динамического обновления устройства накопления паразитного эхо-сигнала, когда компьютерная программа загружена в компьютер, причем инструкции выполняют следующие этапы, на которых периодически передают сигнал посредством измерителя уровня заполнения в направлении материала, причем устройство накопления паразитного эхо-сигнала обновляют данными паразитного эхо-сигнала, когда предварительно, за допускающий параметризацию период времени, полезный эхо-сигнал, отраженный материалом, был идентифицирован, как таковой, в результате динамического характера изменения положения типичных характеристик эхо-сигнала, состоящего из полезного эхо-сигнала и паразитного эхо-сигнала, причем паразитные эхо-сигналы, распознанные в результате статического характера изменения их типичных характеристик на протяжении того же периода времени, используют для обновления устройства накопления паразитного эхо-сигнала, причем паразитные эхо-сигналы вызваны, например, множественными отражениями или отражениями от крепежных элементов, встроенных в контейнер.
32. Машиночитаемый носитель по п.31, в котором компьютерная программа дополнительно содержит инструкции для выполнения следующих этапов, на которых:
записывают кривую эхо-сигнала, отраженную от материала (3), который должен быть измерен;
сохраняют, по меньшей мере, две из записанных кривых эхо-сигналов разных периодов;
распределяют эхо-сигналы сохраненных кривых эхо-сигналов разных периодов по общим группам эхо-сигналов одинакового источника (3, 4) отражения;
анализируют эхо-сигналы, которые были объединены для формирования общих групп эхо-сигналов, в зависимости от изменений во времени типичных характеристик эхо-сигналов;
классифицируют общие группы эхо-сигналов в зависимости от предварительно полученного результата анализа на полезные эхо-сигналы и паразитные эхо-сигналы; и обновляют устройство накопления паразитного эхо-сигнала измерителя уровня заполнения в зависимости от результата классификации.
| US 5157639 А, 20.10.1992 | |||
| УРОВНЕМЕР | 1997 |
|
RU2126145C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УРОВНЯ ЖИДКОСТИ | 1997 |
|
RU2125715C1 |
| RU 94025062 A1, 20.05.1996 | |||
| Устройство формирования многочастотного сигнала | 1975 |
|
SU544173A1 |
| DE 4100338 A1, 09.07.1992 | |||
| УЗЕЛ СОЕДИНЕНИЯ КОМПОНЕНТОВ ВОЗДУШНОГО СУДНА | 2009 |
|
RU2507422C2 |
| DE 19860901 A1, 06.07.2000. | |||

